1. Introduction
Compared to other sensors (camera, LiDAR, etc.), the radar has relatively few malfunctions in various weather conditions or external environments, ensuring the reliability of the system [
1,
2]. For this reason, the radar is used in the autonomous driving industry for unmanned objects such as drones and automobiles [
3,
4,
5,
6,
7,
8,
9,
10]. In addition, the characteristics of a radar are such that the antenna and transmitter/receiver can be miniaturized and quantified, and they operate with low power consumption [
11,
12]. The advantage of such a radar is a sensor suitable for IoT (Internet of Things) applications such as bio-signal detection and gesture recognition [
13,
14].
The FMCW (Frequency Modulated Continuous Wave) radar, one of several radar types, refers to a radar that continuously radiates a frequency modulated signal. Unlike other types of radars, the FMCW radar has the advantage of being able to detect multiple targets. For this reason, the FMCW radar is used as a suitable sensor to detect indoor objects [
15,
16,
17,
18,
19,
20,
21].
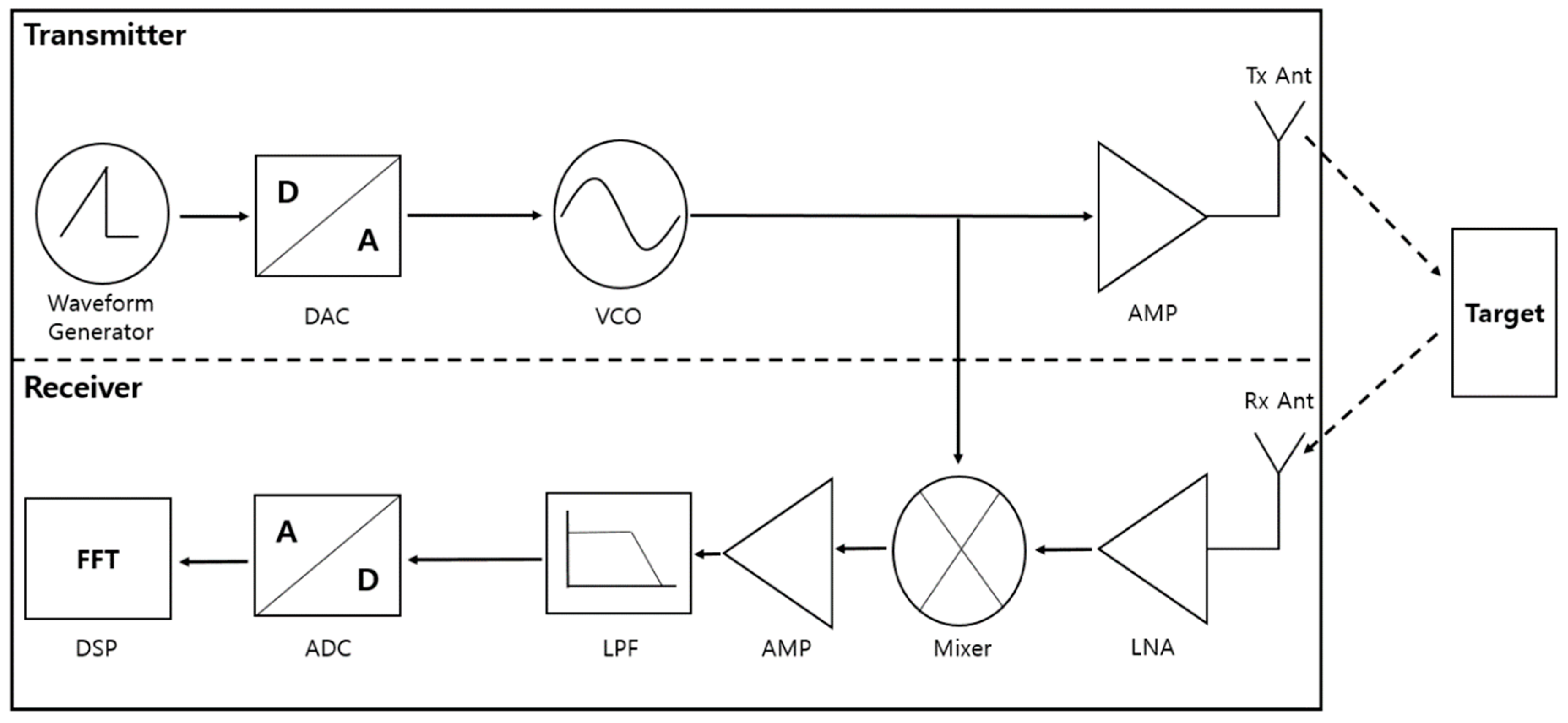
Figure 1 is the system architecture of the transmitter and receiver in a FMCW radar [
22].
Figure 1 shows a block diagram of the process in which the signal transmitted from the transmitter hits the target and the reflected signal is received by the receiver. The FMCW radar transmission signal generates a linear transmission waveform through the Waveform Generator and modulates the frequency of the transmission signal through the VCO (voltage control oscillator). After that, the transmission signal is amplified through the amplifier, and then transmitted to the target through the Tx antenna. The time-delayed signal reflected by hitting the target is received through the Rx antenna and passed through a low-noise amplifier (LNA) to obtain a signal of the same frequency as the transmitted signal. The FMCW radar system measures distance and velocity via the beat frequency, which is the difference between the frequencies of the transmitted and received signals. Therefore, in order to obtain the beat frequency, which is the difference between both signals, it is multiplied by a mixer and then passed through an LPF (low pass filter). An analog signal that has passed through LPF into a digital signal through an ADC (analog to digital converter) is then converted. In the DSP (digital signal process) stage, the beat frequency is extracted from the digital signal through FFT (Fast Fourier Transform), and through this, the relative distance, speed, and the angle of the target are calculated.
Range resolution is a parameter that allows the FMCW radar to accurately measure objects. The formula for calculating the distance resolution is as shown in Equation (1), and its parameters are as follows. In Equation (1),
is the range resolution, C is the speed of light, and BW is the modulation bandwidth of the FMCW radar. It can be confirmed that the range resolution depends on the specific modulation bandwidth of the FMCW radar [
23].
In order to detect an indoor environment with an FMCW radar, it is necessary to use an FMCW radar with a large modulation bandwidth with a resolution as much as a camera. However, the FMCW radar, which has a large modulation bandwidth, is not suitable for use as an indoor environment detection sensor because it is expensive. Currently, relatively inexpensive PIR (Passive IR) sensors and camera sensors are used as indoor environment detection sensors [
24]. However, since the PIR sensor simply detects motion according to temperature changes, it cannot detect fine motion, and the camera sensor is also easily affected by light and external environmental factors. Therefore, the use of the radar, which is relatively less sensitive to environmental factors, has emerged. Recently, research is being conducted in the direction of improving the range resolution in a limited modulation bandwidth without increasing the modulation bandwidth of a low-cost FMCW radar with a small modulation bandwidth. One of the several algorithms involves extending the beat frequency signal in the time domain.
Zero and mirror are used as simple signal extension methods used in communication and image processing [
25,
26]. When this algorithm is applied in FMCW radar DSP, it is as follows. Zero Padding is a method to improve the estimation accuracy by adding a sample having a magnitude of 0 after the signal when a signal containing a beat frequency enters the DSP stage of the Digital signal. Mirror Padding is a method to improve the estimation accuracy by copying a signal containing the beat frequency, turning it over, and attaching it to the end of the signal. However, when FFT is performed to estimate the distance between these two algorithms, side lobes other than the Main Lobe are generated, and the ability to distinguish between objects deteriorates.
Another range resolution enhancement algorithm is Signal Resampling [
27]. It is an algorithm that improves the range resolution by re-sampling the signal at the target’s main lobe point. The algorithm uses Phase Correlation to increase the complexity of the algorithm by using FFT and IFFT in the process of resampling the signal. Also, it is difficult to apply the algorithm to multiple targets. For this reason, it is not suitable for improving the range resolution of low-cost FMCW radars through uncomplicated algorithms in indoor environments.
Recently, an algorithm was developed that expands the signal through Deep Learning [
28]. It learns a signal containing the beat frequency, which is an original signal through deep learning, and expands the front and back of the signal to improve the distance resolution. Although the range resolution has been improved through the algorithm, there is a disadvantage in applying it in an indoor environment. First, a network design for learning is required, and complexity increases by extracting a signal of a desired band through Zoom FFT. Also, as a problem caused by generating a new signal through deep learning, if the object to be measured is close, the information on the target disappears. When detecting an object with an object detection sensor in an indoor environment, the resulting object disappearance can be fatal. Therefore, it is not appropriate to use in an indoor environment because it cannot afford the risk of such complexity and the disappearance of information on attached objects.
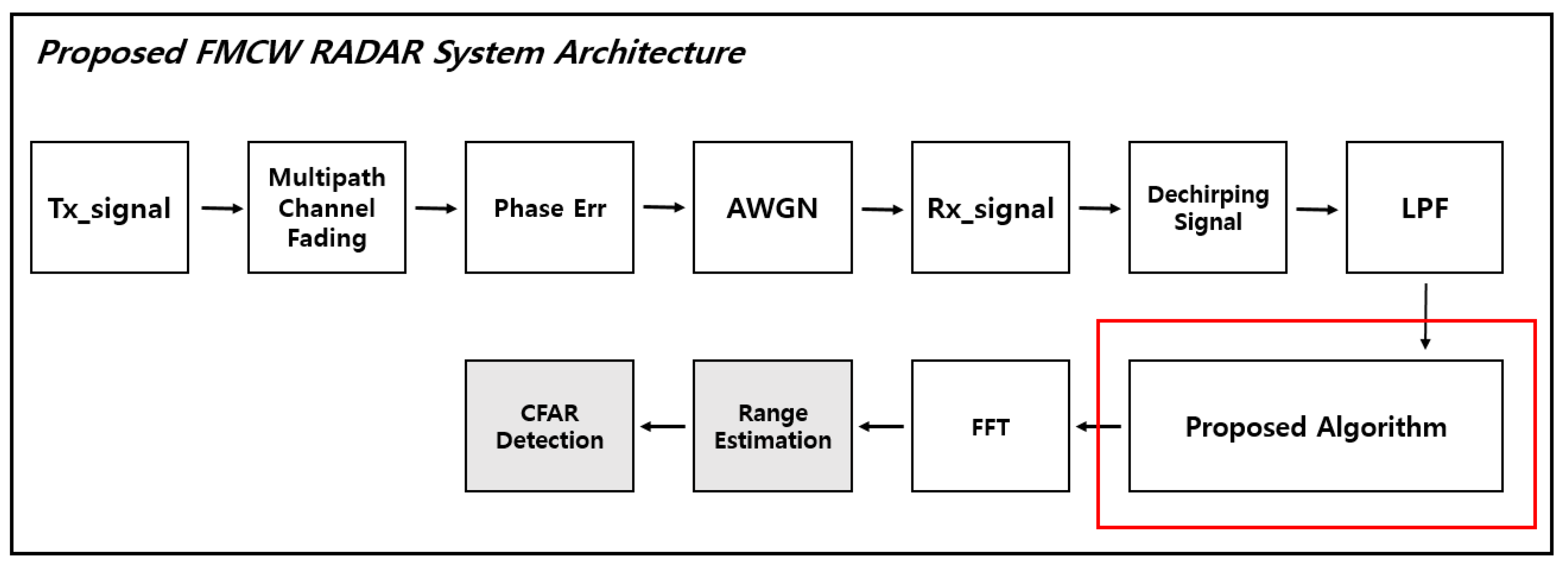
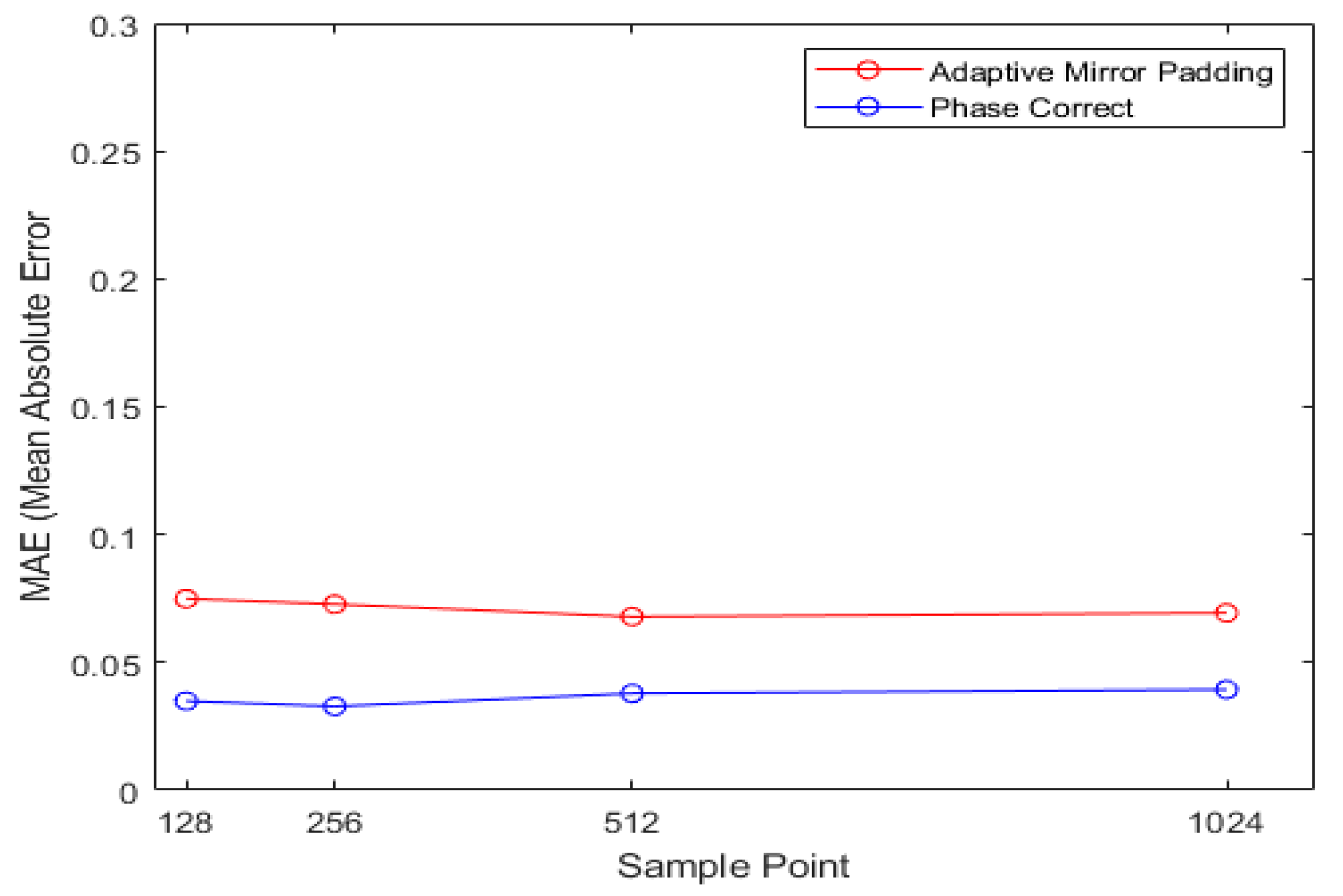
In this paper, two algorithms are proposed to reduce the side lobe that occurs while improving the range resolution. The first algorithm proposed is Adaptive Mirror Padding, which improves the distance estimation accuracy by extending the signal acquired in the time domain without discontinuity of magnitude. The proposed second algorithm is Phase Correct Padding, which is a method of improving the distance estimation accuracy by extending the signal acquired in the time domain through the FMCW radar without a phase error.
The order of the contents of this paper is as follows.
Section 2 explains the basic principles of FMCW radar and how to estimate range.
Section 3 describes an algorithm for improving range resolution through Adaptive Mirror Padding and Phase Correct Padding algorithms. In
Section 4, we verify the results of the simulation through MATLAB and the algorithm through the actual FMCW radar. Finally, conclusions are drawn in
Section 5.
2. Overview of the FMCW Radar and Range Measuring
Waveform types of FMCW radar are sawtooth and triangular waves. This section explains the overview and range measuring through sawtooth waveforms.
Figure 2 shows the FMCW radar sawtooth wave transmission and reception signals over time. In this graph, the blue line is the transmitted signal, and the red line shows the signal received by reflecting the stopped object. The transmitted signal is reflected and received by the object to be measured, and the frequency difference appears in proportion to the delay time (τ).
Equation (2) expresses the distance between the radar and the target to be measured by using the delay time (
τ). In the above equation,
is the delay time,
C is the speed of light, and
r is the distance between the radar and the target to be measured.
Equation (3) expresses the beat frequency using the distance. This makes it possible to obtain an ideal beat frequency corresponding to the distance between the radar and the target. In the above equation,
is the modulation bandwidth,
r is the distance,
C is the speed of light,
is Sweep time,
is the ideal beat frequency.
Equation (4) express the FFT bin spacing. The number of FFT points is , and is the sampling rate. is the minimum interval at which a signal can be represented in the frequency domain.
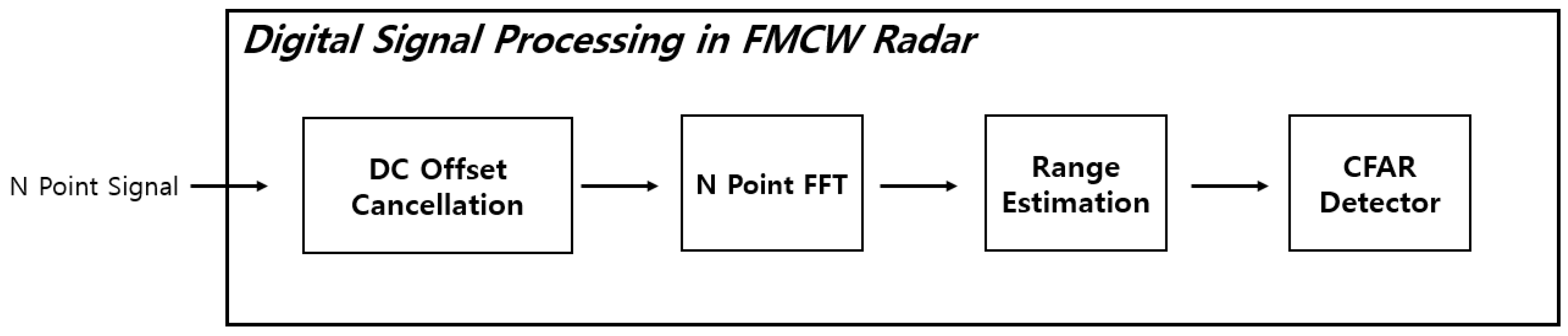
Figure 3 shows a structure in which a signal sample of N point digitally converted through ADC at the receiving end operates in DSP. First, the DC value of the signal is removed, and the beat frequency is extracted by taking an N point FFT.
If the target measured by the FMCW radar is a single target, one Max Value is generated among the N Point FFT results, and the corresponding index is extracted.
In Equation (5), X(
i) means the output value at the
i-th bin after performing the FFT.
If the bit frequency corresponding to the range resolution and the minimum is matched one-to-one, the distance can be estimated through the FFT Bin Point Index as shown in Equation (6). Through this, range estimation of the target to be measured is performed.
The CFAR (Constant False Alarm Rate) algorithm is used to check whether the target is detected [
29,
30,
31]. The CFAR algorithm is detects a target to be detected during radar signal processing. The CFAR algorithm uses a method of variably adjusting the threshold to have a fixed false alarm rate by setting a fixed false alarm rate, measuring fluctuating noise as an average clutter power, and multiplying the coefficient corresponding to the false alarm rate. The threshold value and the result of the FFT are compared, and if the threshold is large, it is determined as a target, and if it is small, it is determined as not a target. According to the method of observing the average clutter power, there are CA (Cell Averaging) and OS (Order Statistic).
3. Proposed Algorithm
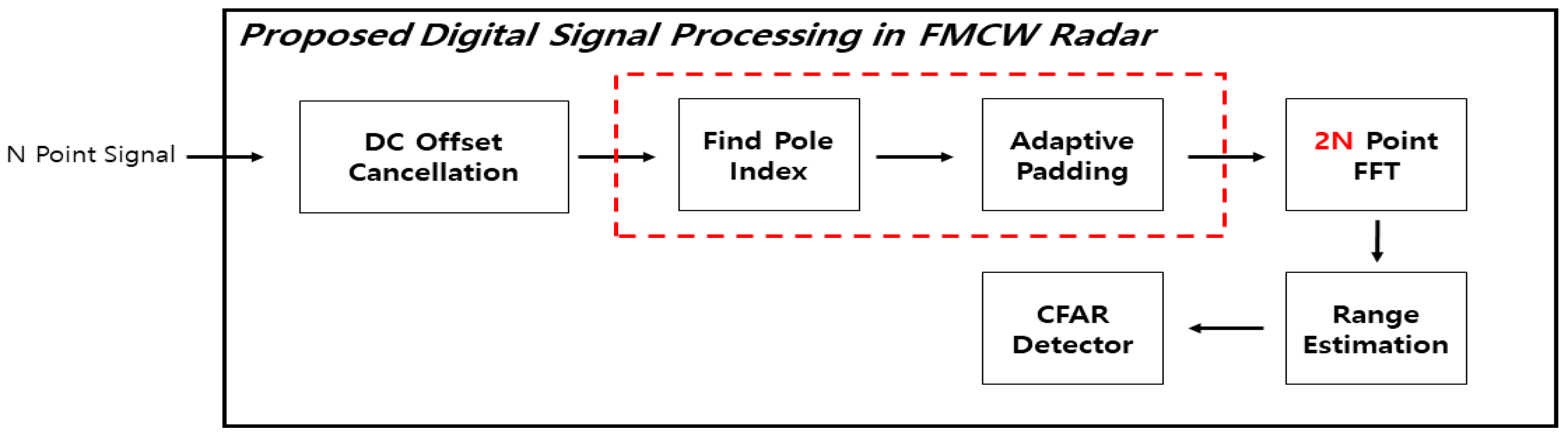
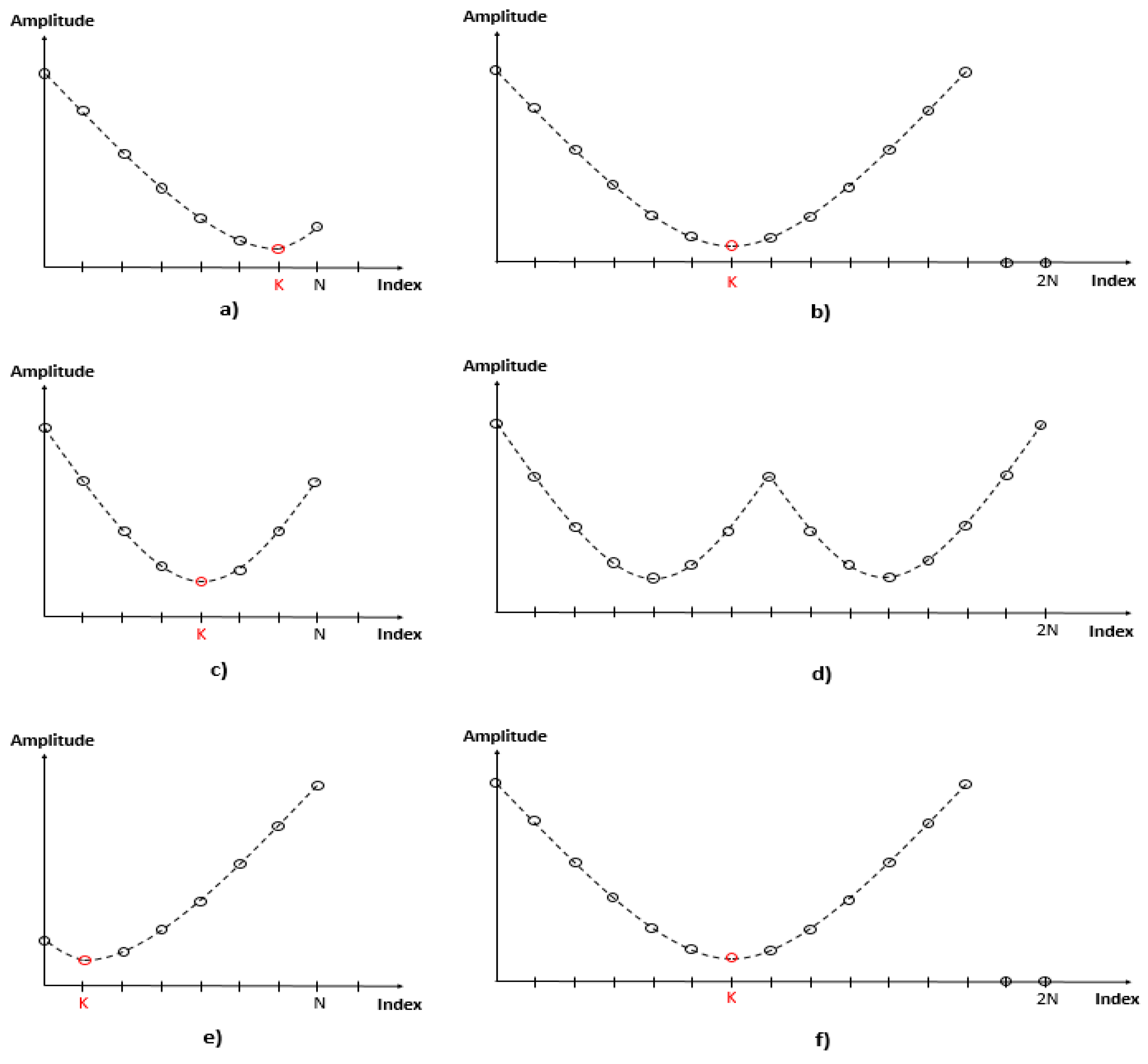
In this paper, the range resolution is improved through two algorithms. The first method is Adaptive Mirror Padding. The main point of this algorithm copies the signal based on the poles. The direction of copying changes according to the number of data lost during the copying process, and the method of padding is also determined. In this section, it is assumed that the padding is done only once for the purpose of explaining the algorithm. The method of the algorithm will be explained with reference to
Figure 4 below.
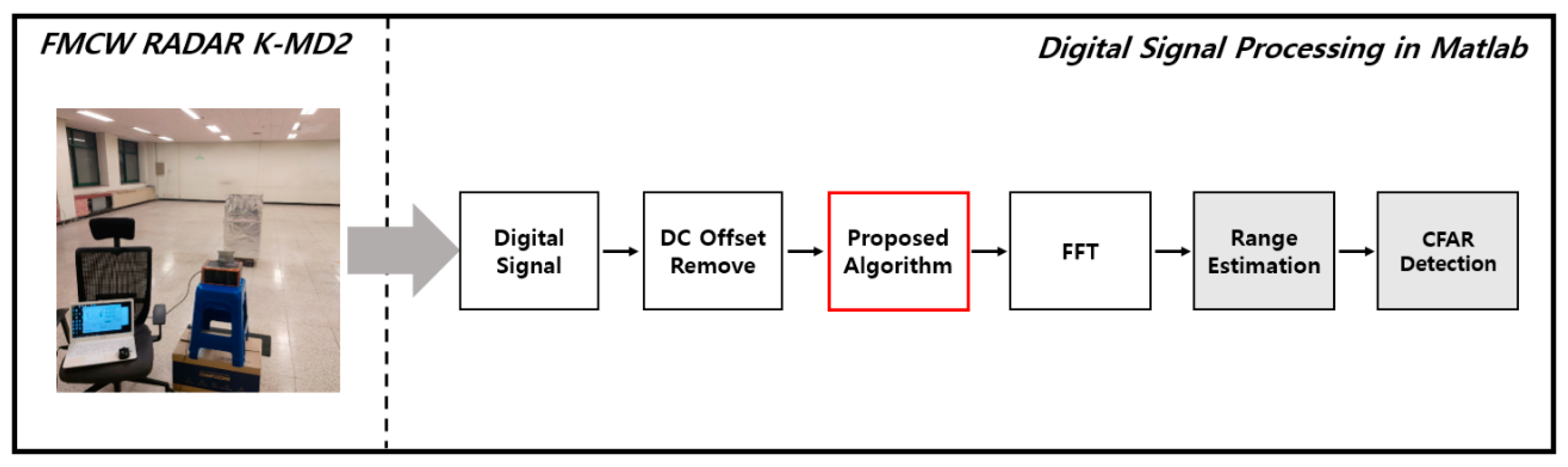
Figure 4 shows the Architecture of the FMCW radar DSP with the proposed algorithm added.
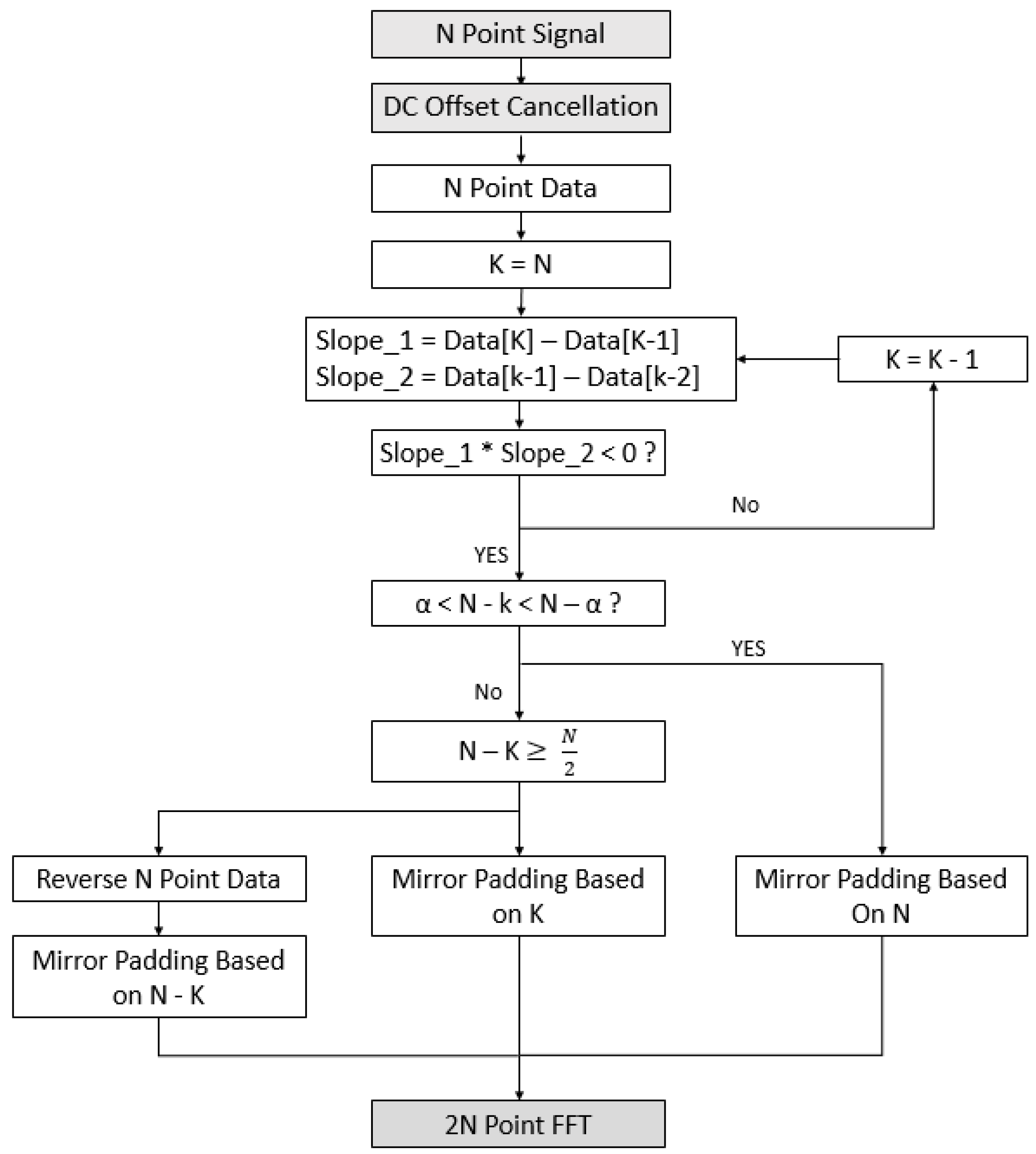
Figure 5 is a flow chart for the algorithm, and
Figure 6 explains the algorithm’s process.
In
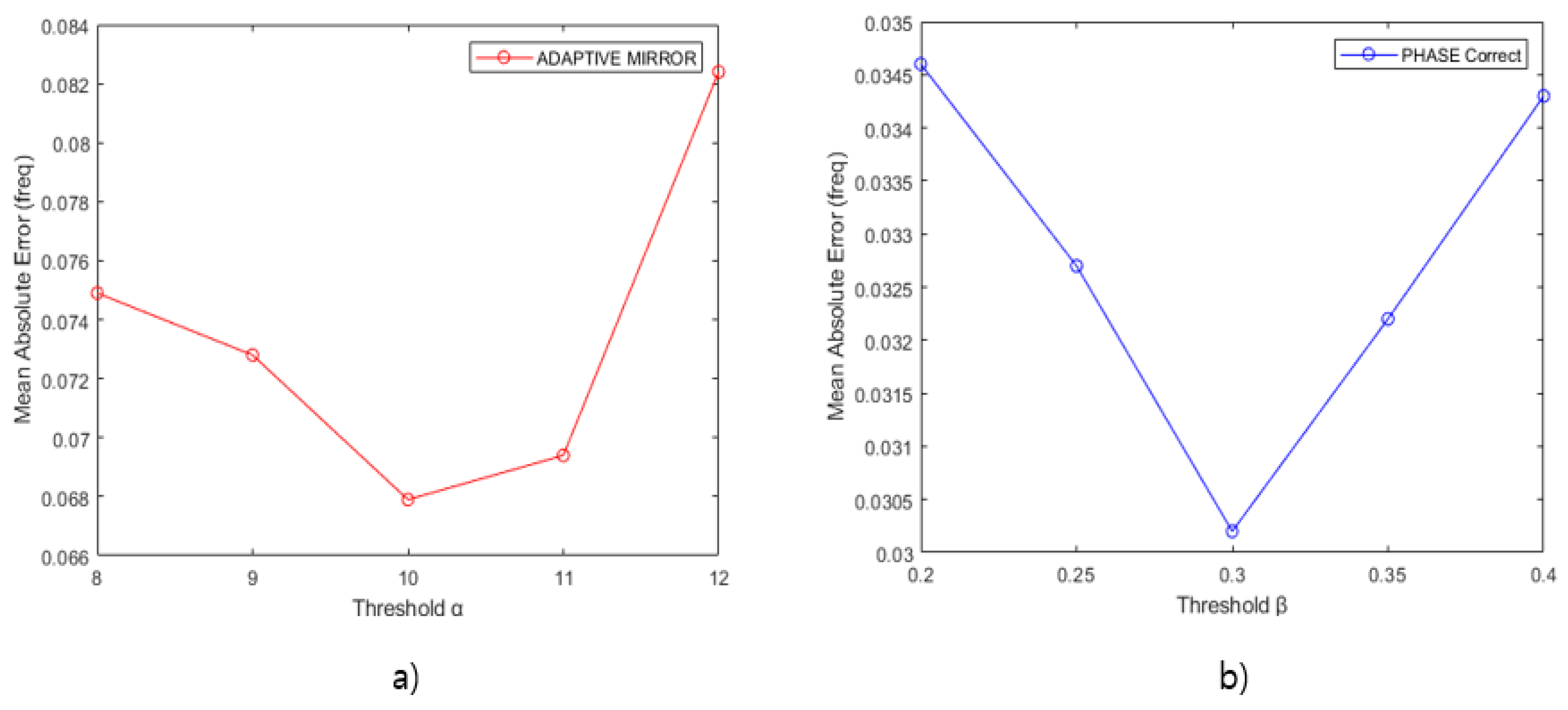
Figure 5, the signal data sampled at N points is received from the DSP after passing through the ADC. First, the number of samples of the data is stored as K, and an algorithm to find the pole is performed. In the method of finding the pole, two slopes Slope1 and Slope2 are obtained through three samples from the last sample (K) of the received signal. At this time, if the two slopes are positive, it is determined that they are not poles, and in order to compare the next three samples, K = K − 1 and then the next point is compared. If the two slopes are different, the position is determined as the pole and proceeds to the next. After finding the position of the pole, whether to perform Mirror Padding or Pole Mirror Padding is determined according to the number of lost samples. The optimal value of the α point was made through an experiment to find the optimal alpha point in the Simulation Section.
Figure 6 shows an algorithm that is padded to Adaptive based on the position of the index of the pole. First, (a), (c) and (e) will be described separately based on the position of Index K. In the case of (a), the number of samples lost is N-K. If N-k is smaller than the set number of samples, mirror padding is performed on the pole based on Index K, and padding is performed as shown in (b). In the case of (c), if the number of lost samples N-K is greater than the set number of samples, mirror padding is performed without applying the pole algorithm, and padding is performed as shown in (d). In the case of (e), if the index K of the pole is the front part of the signal, the signal is inverted. After that, the number of lost samples is compared, and if it is less than the set value, pole mirror padding is performed, and if it is greater than the set value, mirror padding is performed. (f) shows the case in which the number of lost samples is greater than the set value.
After performing Adaptive Mirror Padding, a 2 N point FFT is performed by padding zeros by the number of lost samples to minimize data loss.
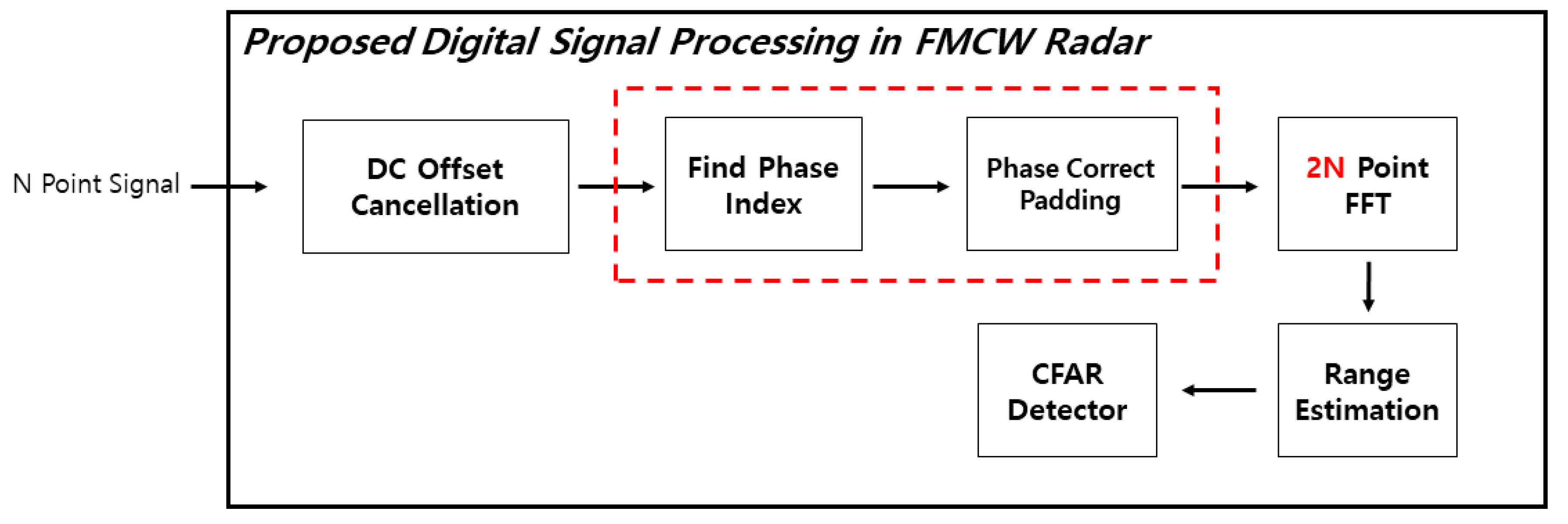
The second algorithm is Phase Correct Padding. The main point of the algorithm is copied after correcting the phase of the signal in order to maintain the linearity of the phase in the process of copying and pasting the original signal. The contents of the algorithm will be explained through the following figure.
Figure 7 shows the addition of the Phase Correct Padding algorithm to the existing DSP architecture.
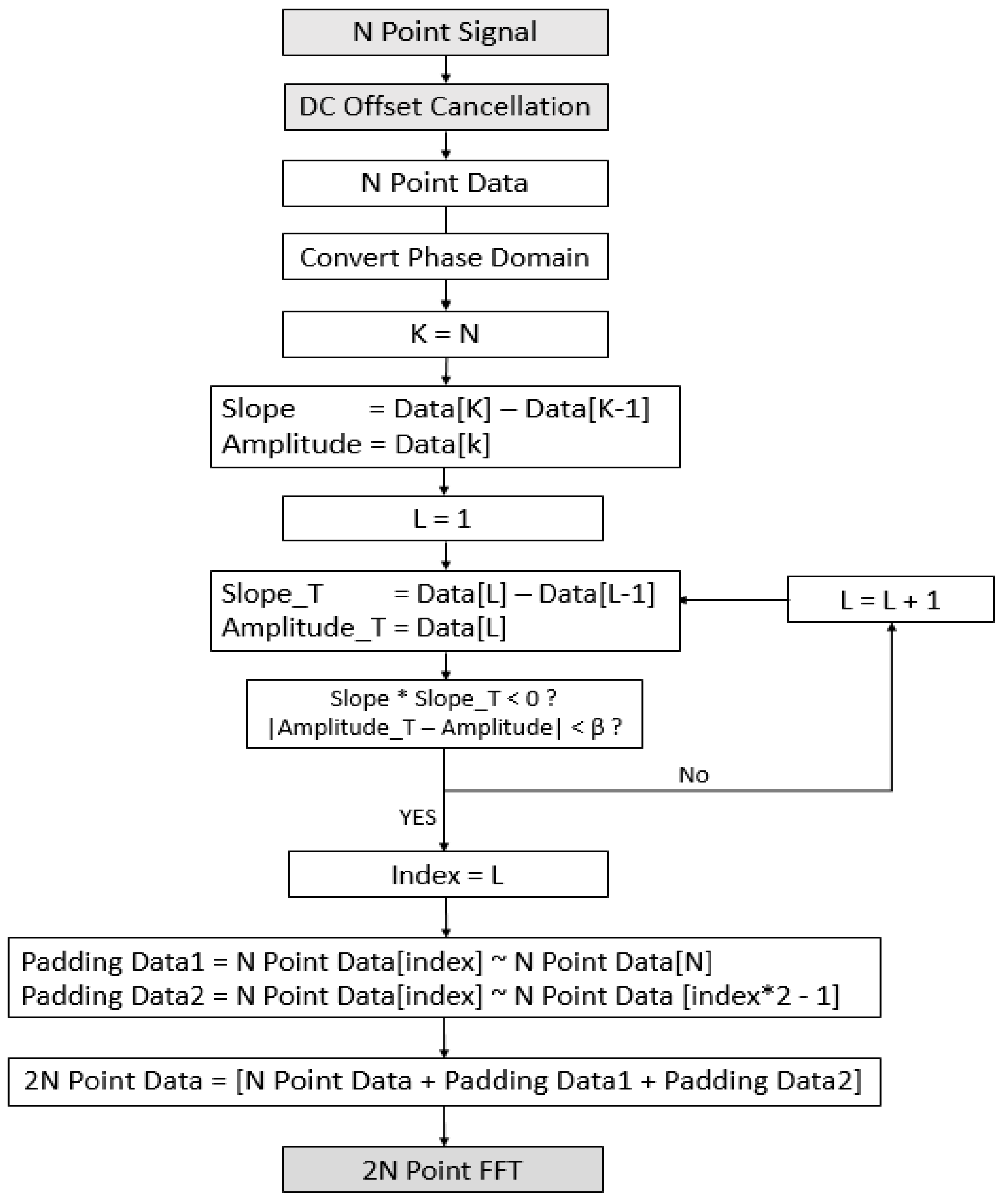
Figure 8 is a flow chart for the algorithm, and
Figure 9 is a figure explaining the process of the algorithm.
Figure 8 describes the flow chart of the algorithm. To start the algorithm, an N point digital signal containing the beat frequency is received from the FMCW radar. The received signal is applied to the algorithm after removing the DC Offset. N Point Digital Signal to which DC offset is applied is called N Point Data. To apply this algorithm, we need to know the phase and magnitude of each sample. Therefore, the algorithm starts by changing to the phase domain. The first step of the algorithm is to find the phase slope and magnitude of the last sample of N point data. After that, the sample at the point most similar to the slope and magnitude of the last sample obtained earlier is compared from the first index of N Point Data to obtain it. The optimal value of the threshold β set for comparison of similar points was found through experiments in the
Section 4. The L Index the point where the magnitude and phase of the last sample are closest. For Padding, set the following two Padding Data. Padding Data 1 refers to samples from L index to N Index of N Point Data and Padding Data 2 refers to samples from L index to 2 × L − 1 index of N Point Data. 2 N Point Data is an extension signal in which Padding Data1 and Padding Data2 are sequentially padded after the original signal, N Point Data. After that, 2 N Point FFT is performed to extract the distance. If the input signal is non-uniformly sampled, the distance can be extracted using NUFFT [
32,
33].
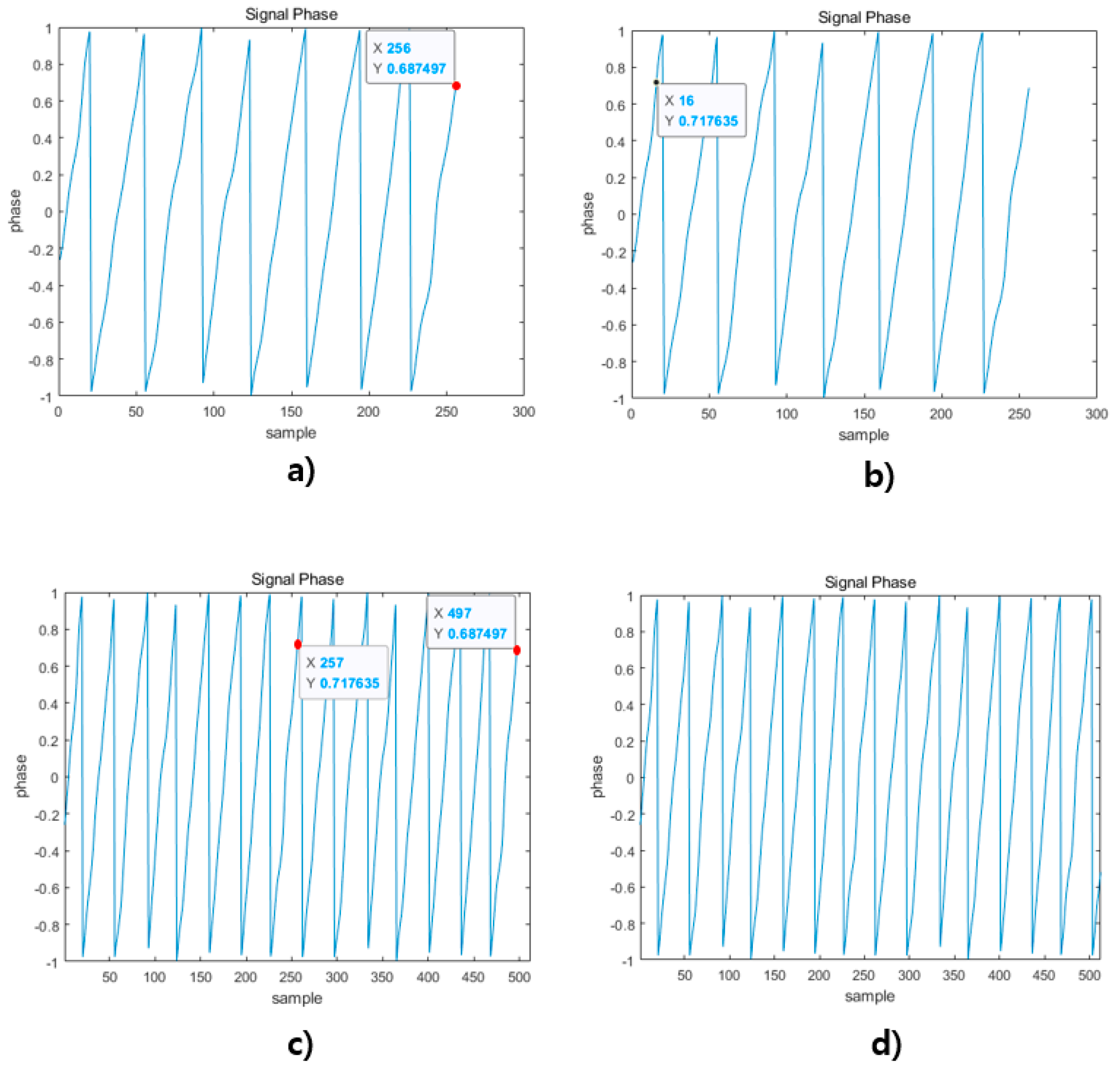
Figure 9 shows the application process of the algorithm: (a) is the process of obtaining the slope and magnitude of the signal of the last sample in the Convert Phase Domain, (b) is the process of finding the sample of the L Index mentioned above, (c) shows the padding process of Padding Data1 behind the original signal, and (d) shows the signal extended to the final 2 N Point Sample by padding to Padding Data2.
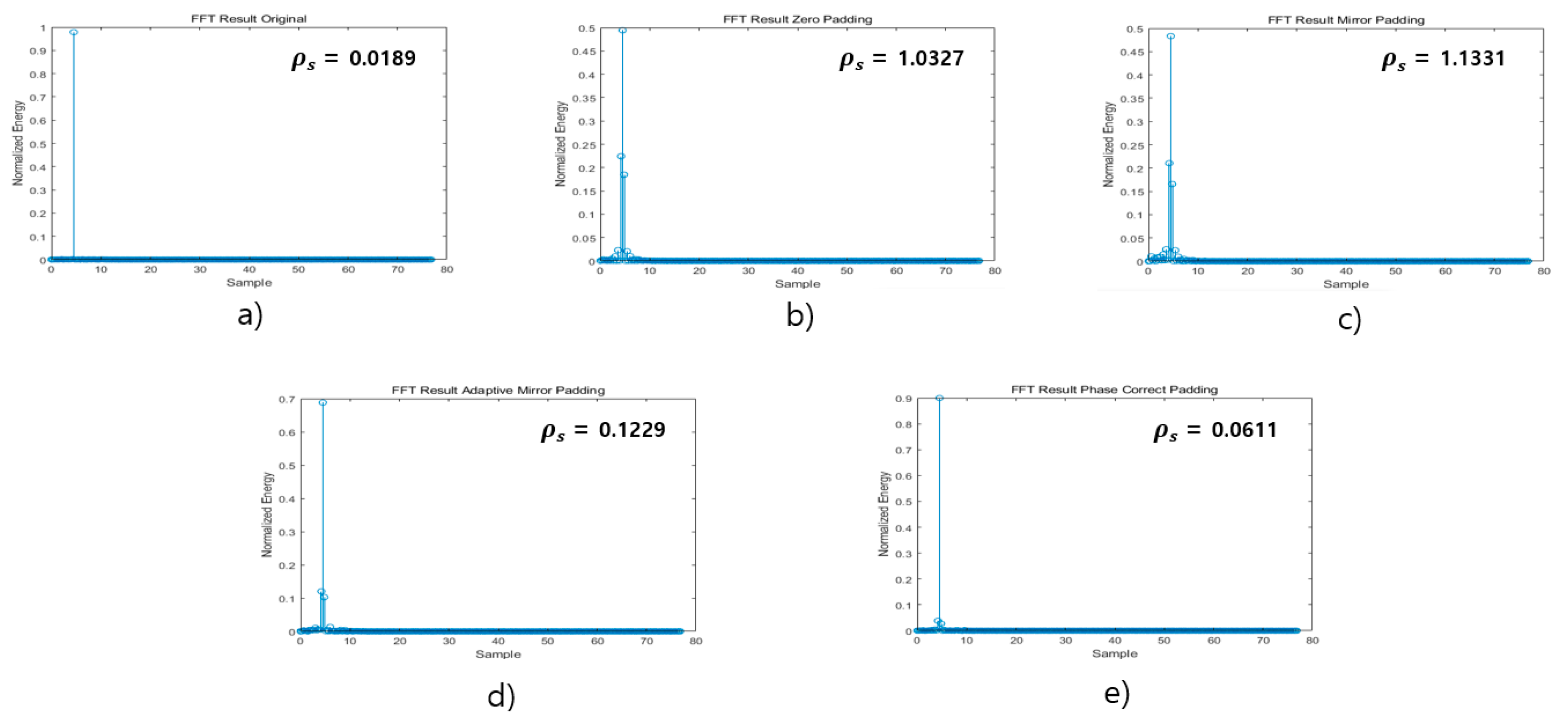
To verify the algorithm proposed in this paper, a
representing the ratio of the side lobe to the main lobe was defined. The definition of
is as follows:
In Equation (7), k is the Index of Bin with Maximum Energy. In Equation (8), means the energy of the i-th bin, and means the n-th normalized energy.
Figure 10 is the result of Single Target FFT for each algorithm. The setting parameters are as follows. In the case of (a), the modulation bandwidth is 500 MHz, and the range resolution is 0.3 m according to Equation (1). In the case of (b)–(e), the modulation bandwidth is 250 MHz, and the range resolution is 0.6 m by Equation (1). In case (b) to (e), the distance estimation accuracy is improved by applying each algorithm to a signal with a modulation bandwidth of 250 MHz. TX_SNR is 10 db, and assuming that the target distance is 4.5 m, the results (a) to (e) were all obtained at the correct FFT bin location. As a result of estimating the ratio of the main lobe to the side lobe through the
in Equation (8), the proposed Phase Correct Padding was confirmed to be 0.0611, which was the most similar to (a), and then the Adaptive Mirror Padding was 0.1229. In the case of the conventional padding, Zero Padding and Mirror Padding, the results were 1.0327 and 1.1331, respectively. Through this, it was confirmed that the proposed algorithm significantly reduces the occurrence of side lobes, and when the CFAR algorithm is applied to detect the target later, it is possible to obtain the advantage of being able to accurately detect the target.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}