
Low-Cost Beamforming Concept for the Control of Radiation Patterns of Antenna Arrays Installed onto UAVs


Abstract
:1. Introduction
2. Materials and Methods
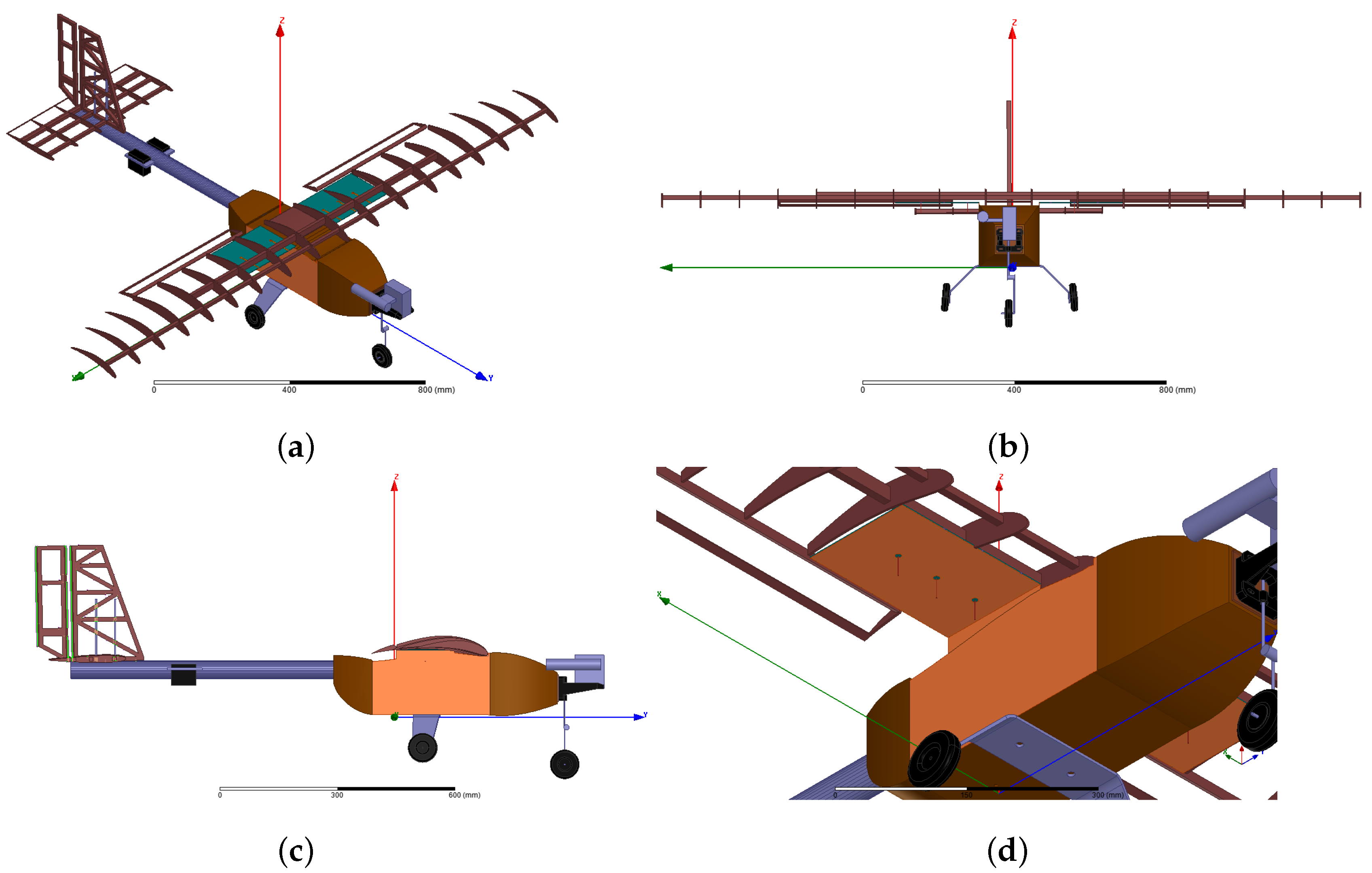
2.1. Electromagnetic Modeling of UAV and Antenna Arrays
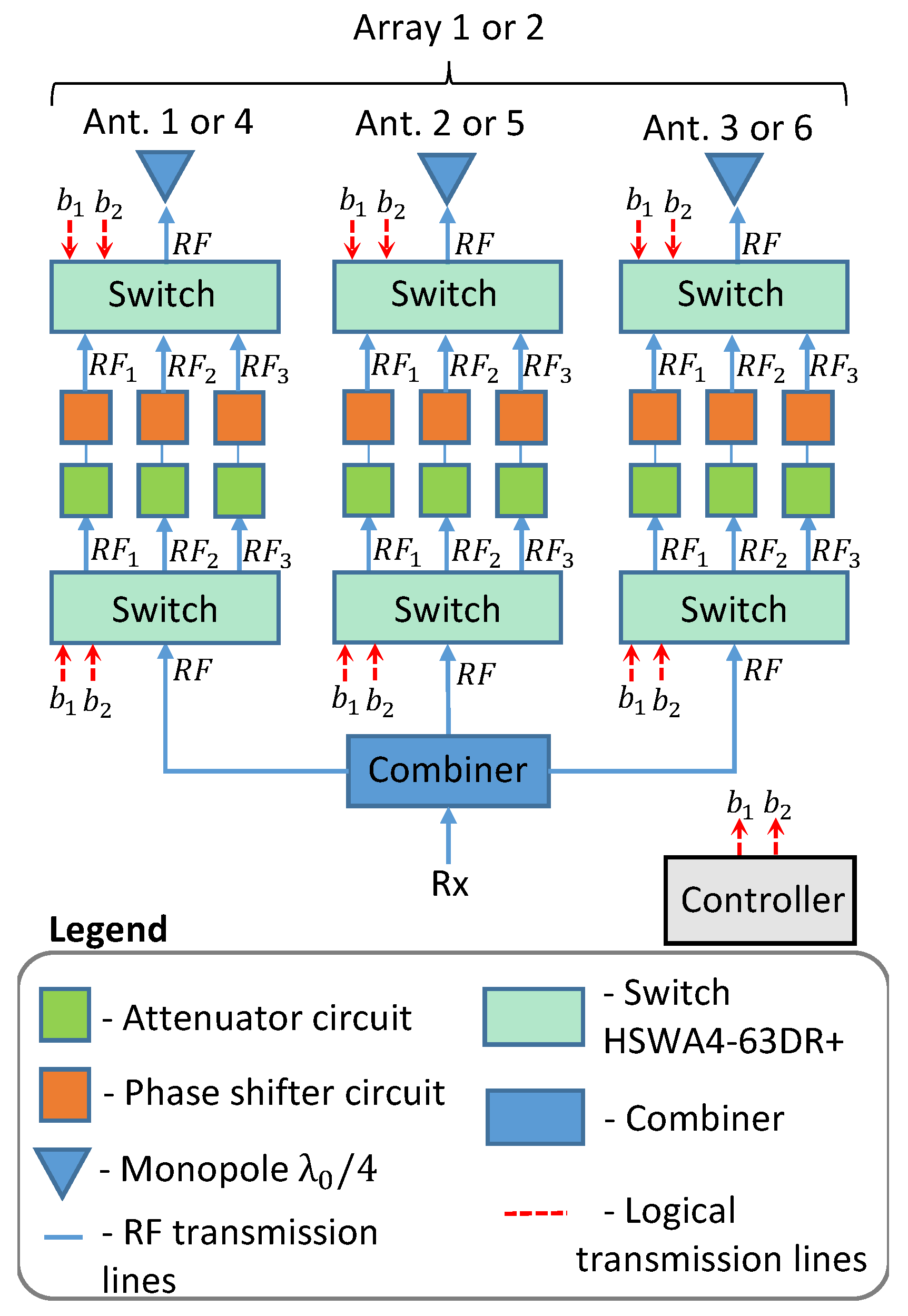
2.2. Proposed Beamforming Architecture
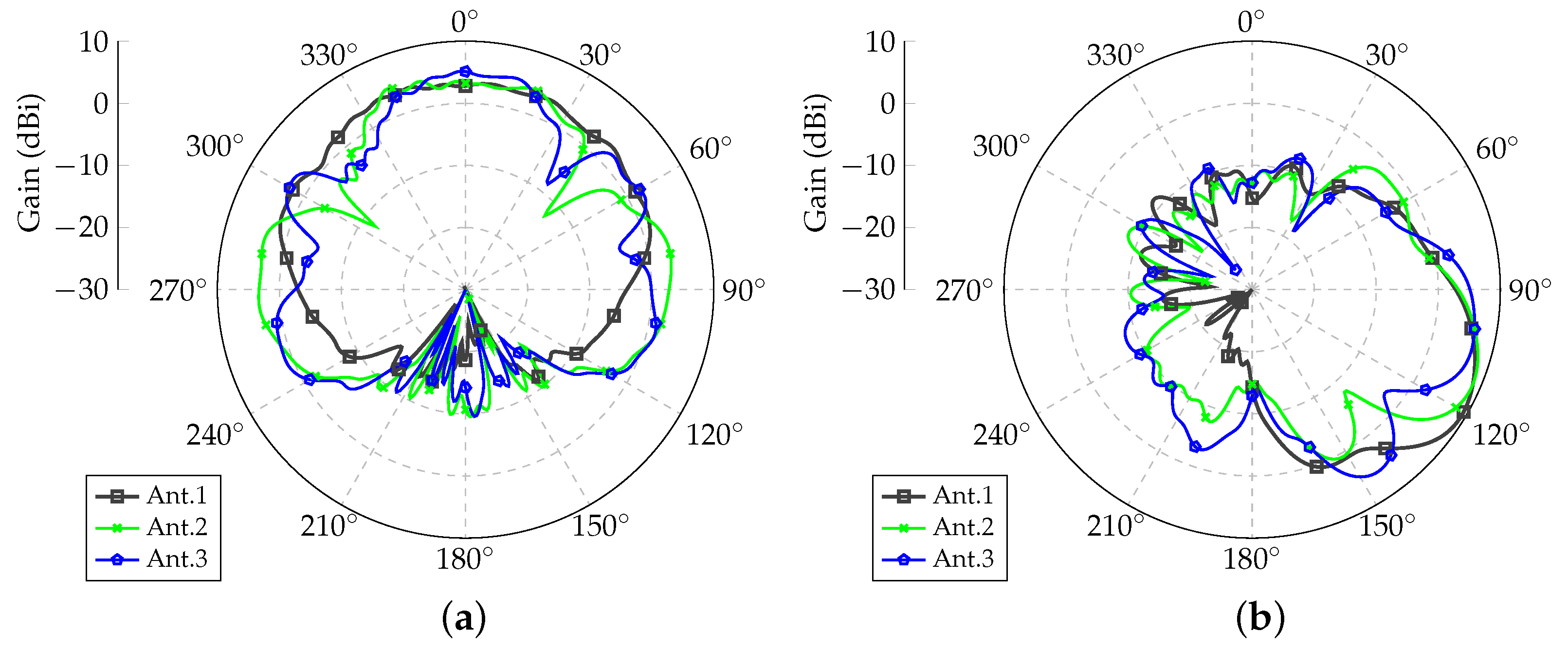
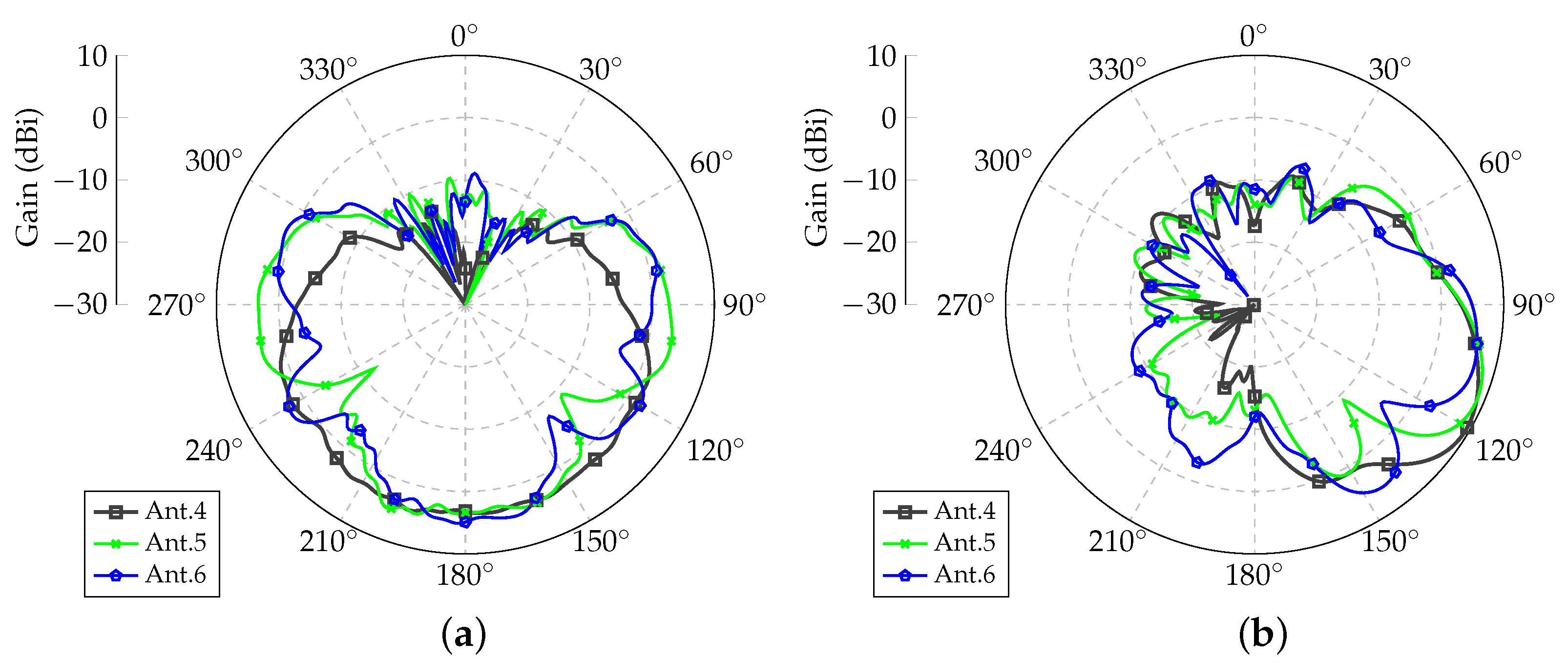
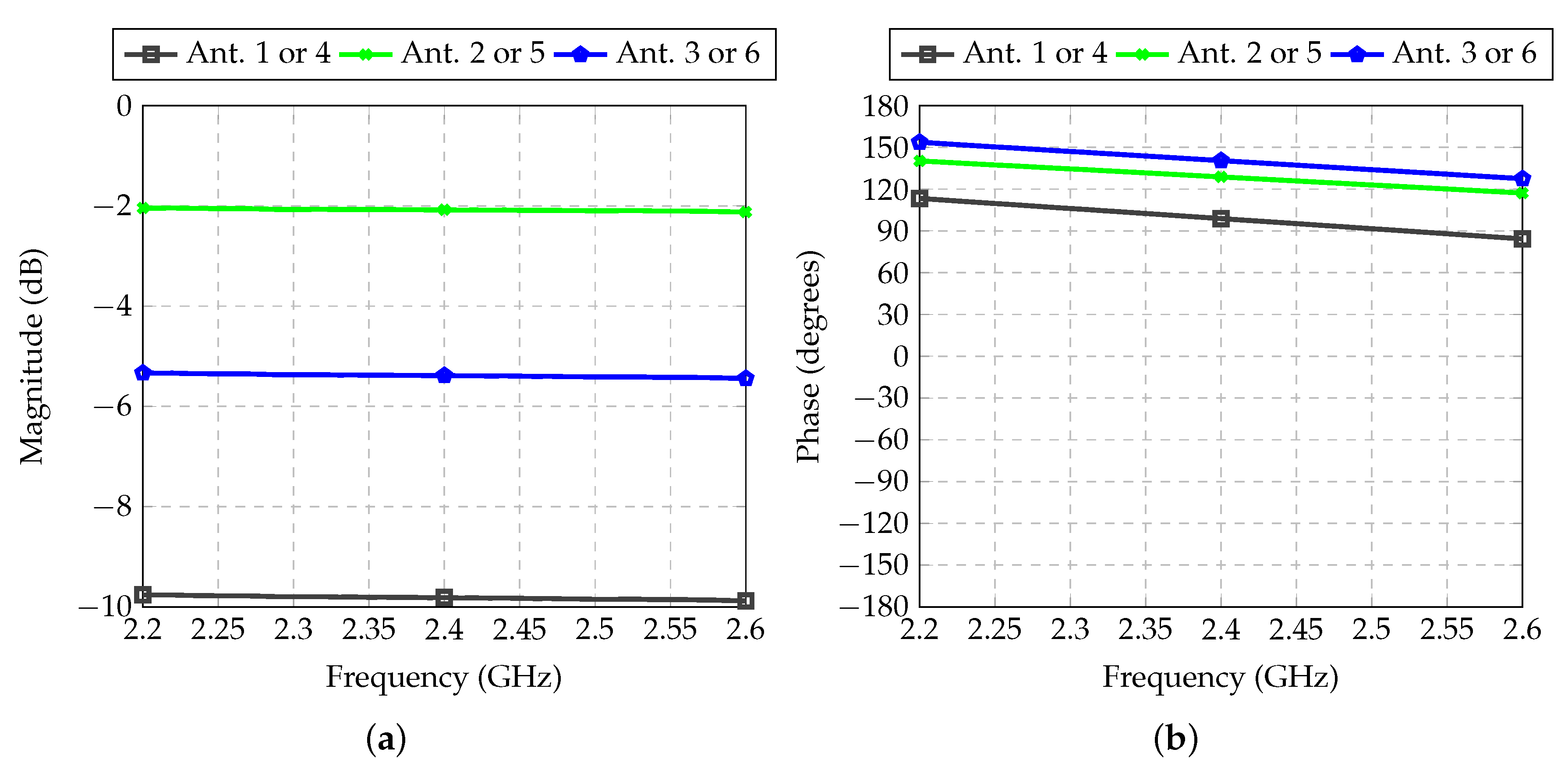
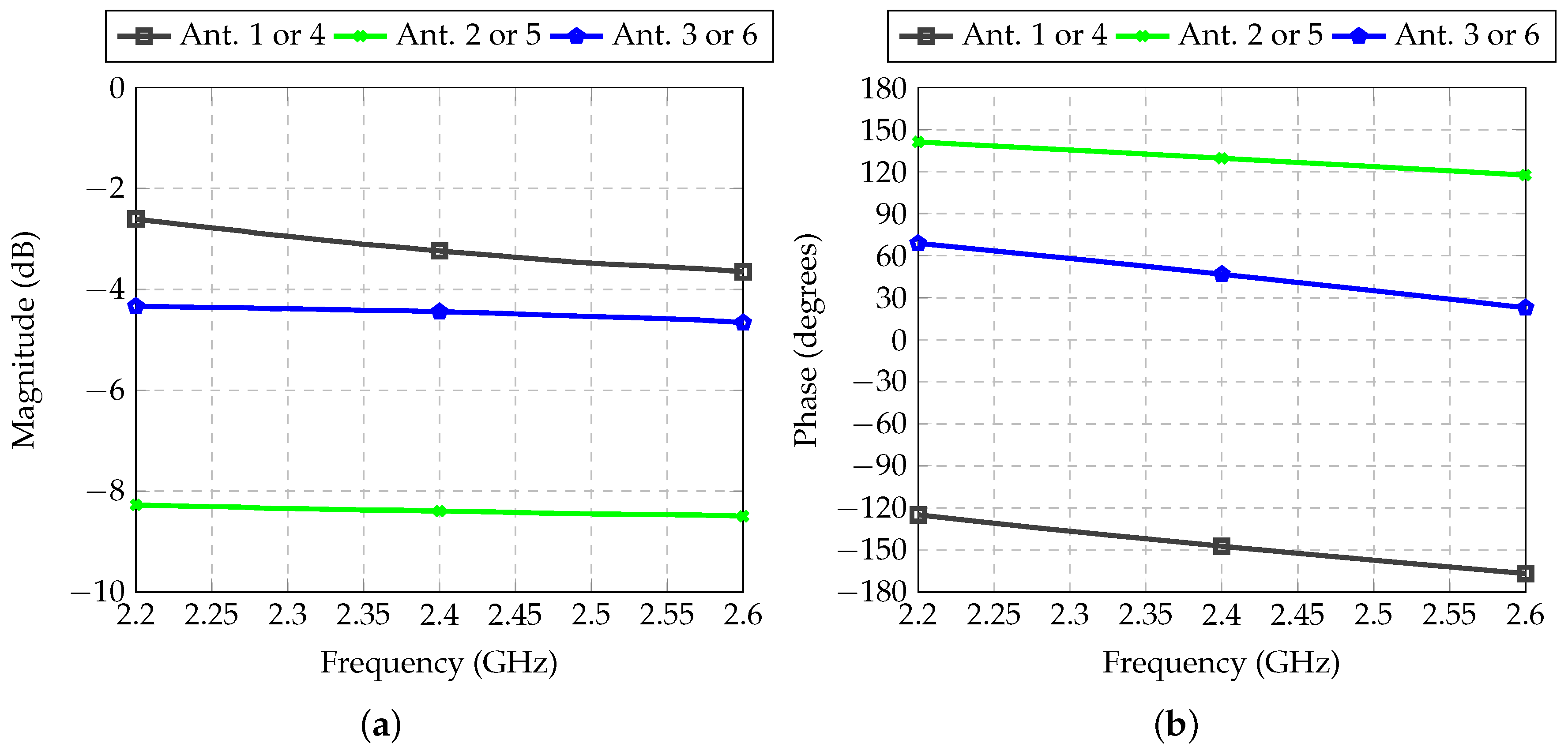
2.3. Performance of Antennas Installed onto UAV
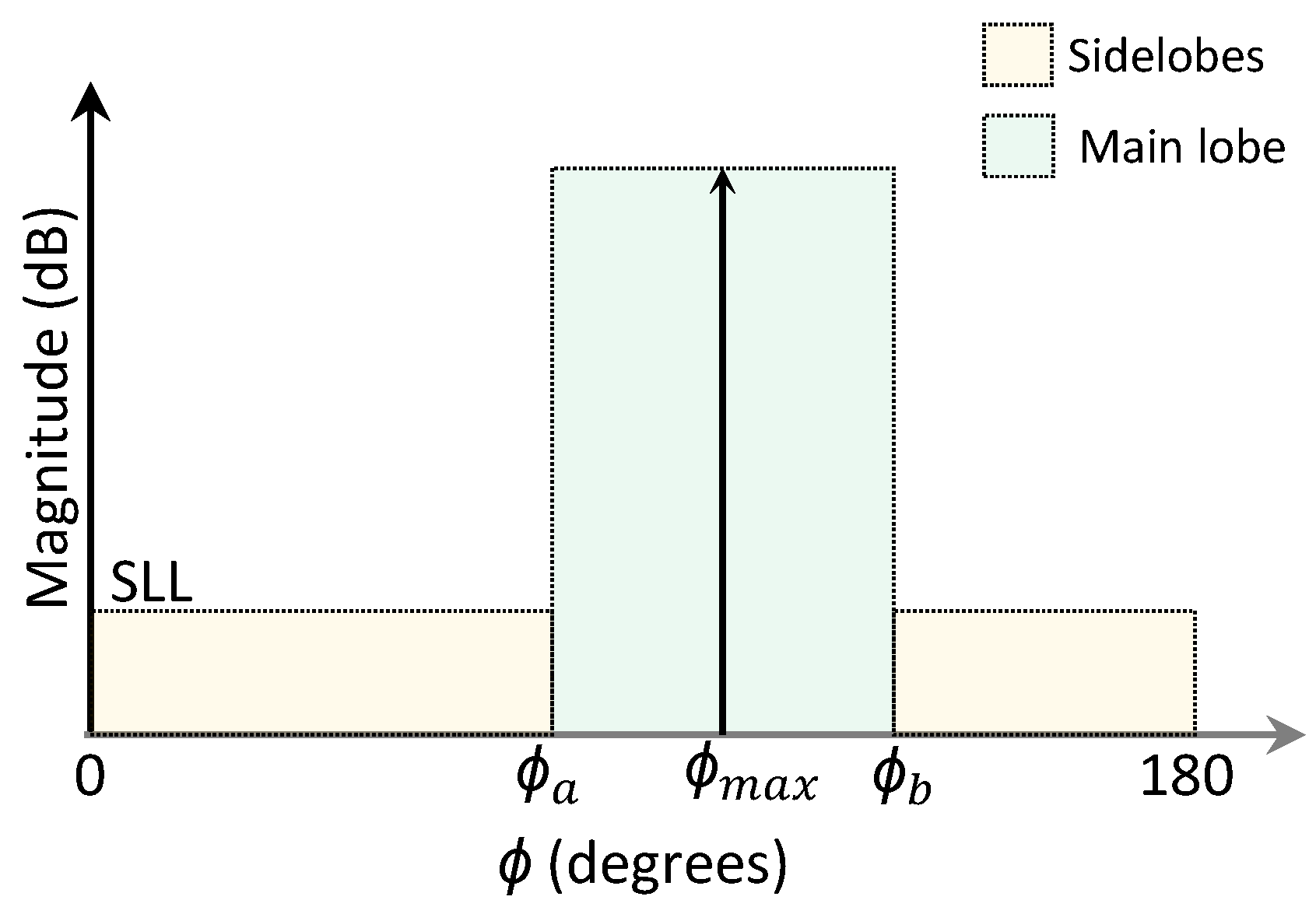
2.4. Application of Particle Swarm Optimization to Arrays Installed onto UAV
- Swarm size: 30 particles;
- Maximal number of iterations: 35;
- Inertia (): 0.7;
- Self-confidence coefficient (): 0.5;
- Confidence in the swarm (): 0.5.
3. Results
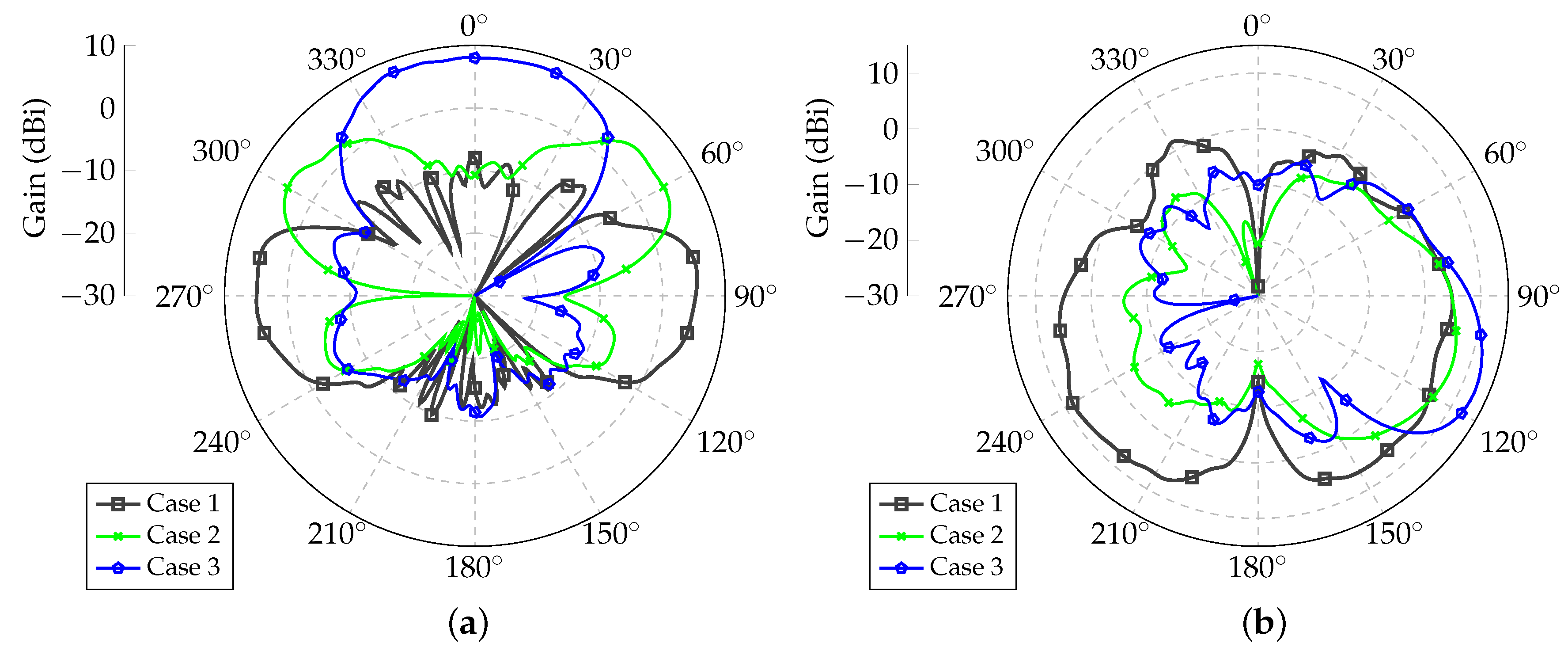
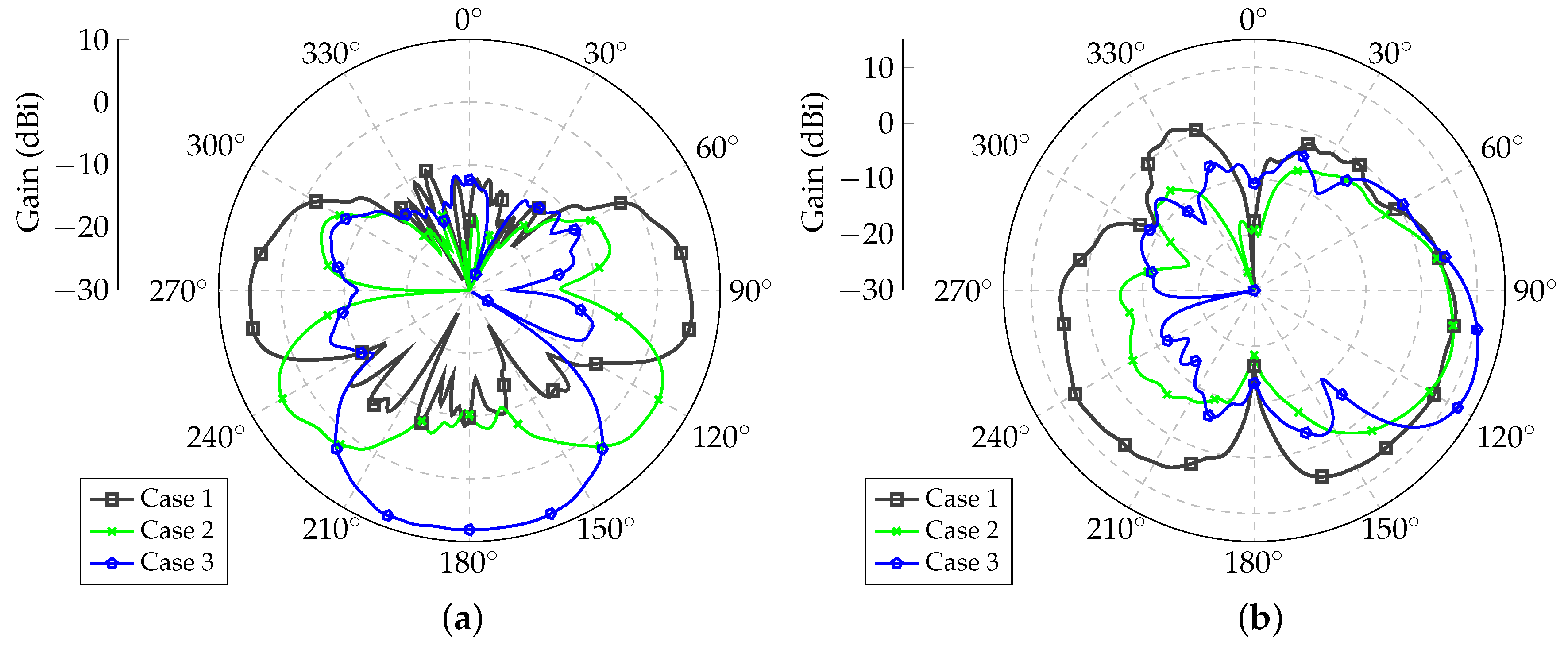
3.1. Optimized Radiation Patterns—Ideal Case
- Case 1: the main beam should be pointed towards the UAV front part or ;
- Case 2: the main beam should be pointed to ;
- Case 3: the main beam should be pointed towards the right wing or .
- Case 1: the main beam should be pointed towards the UAV front part or ;
- Case 2: the main beam should be pointed to ;
- Case 3: the main beam should be pointed towards the left wing or .
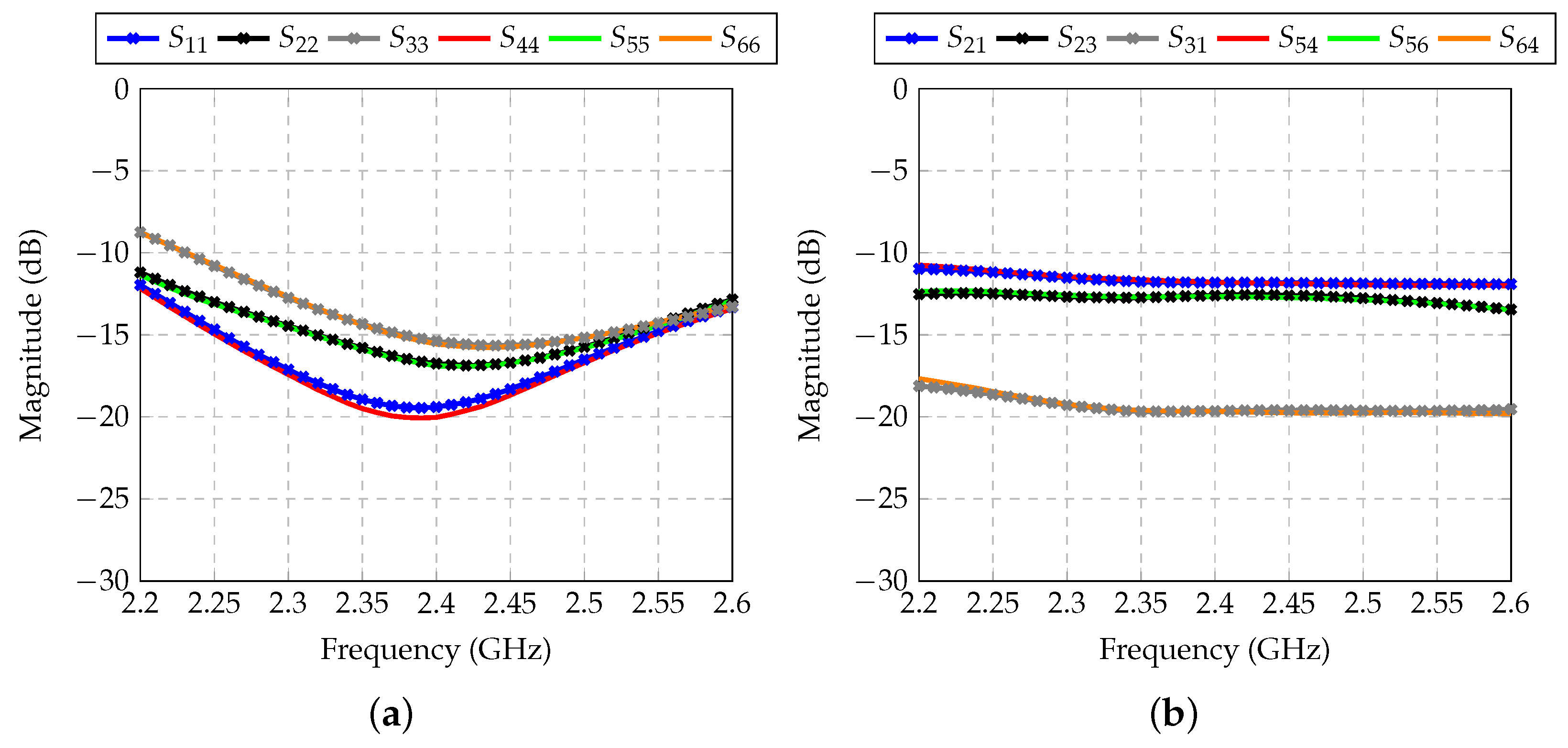
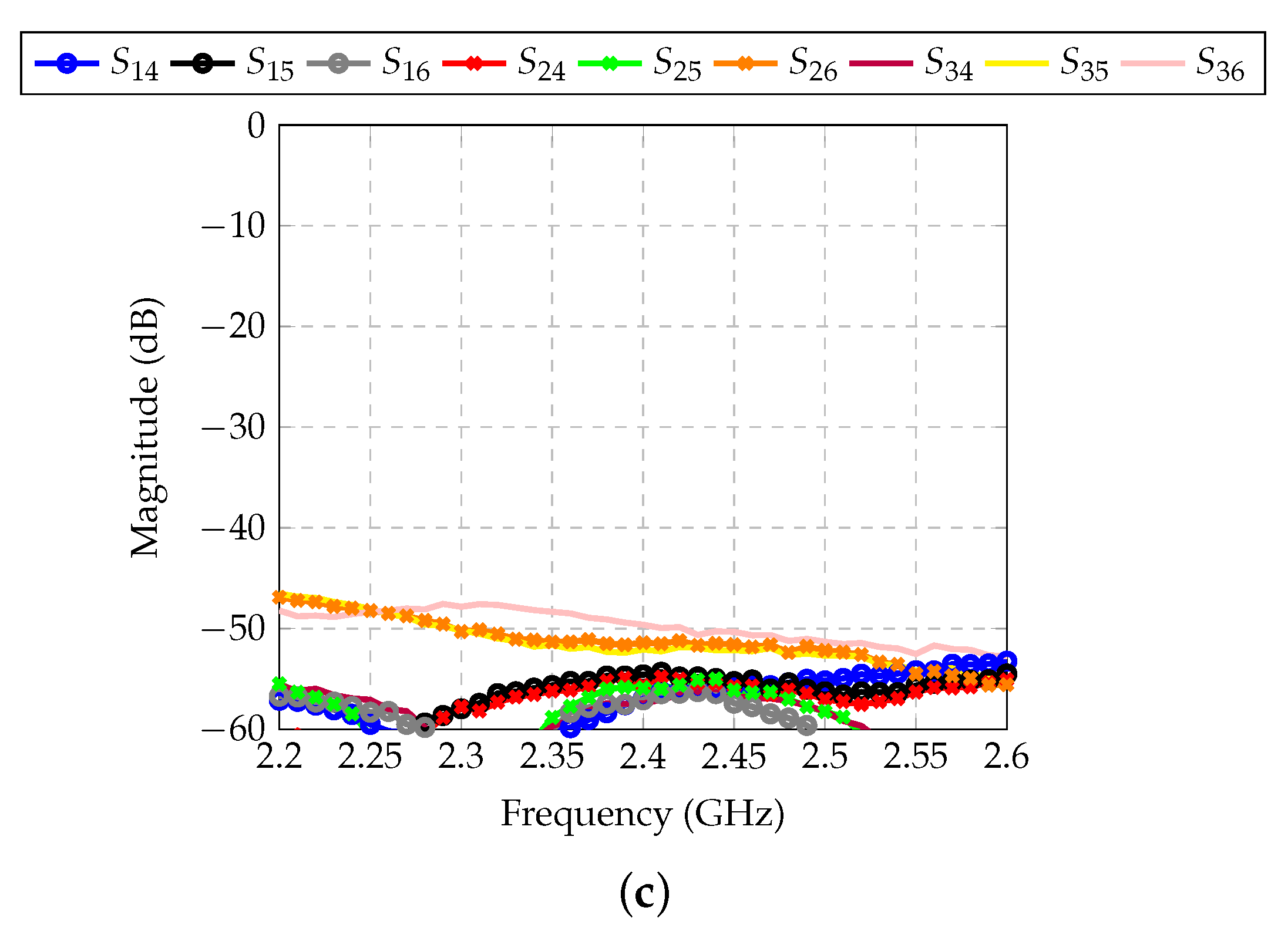
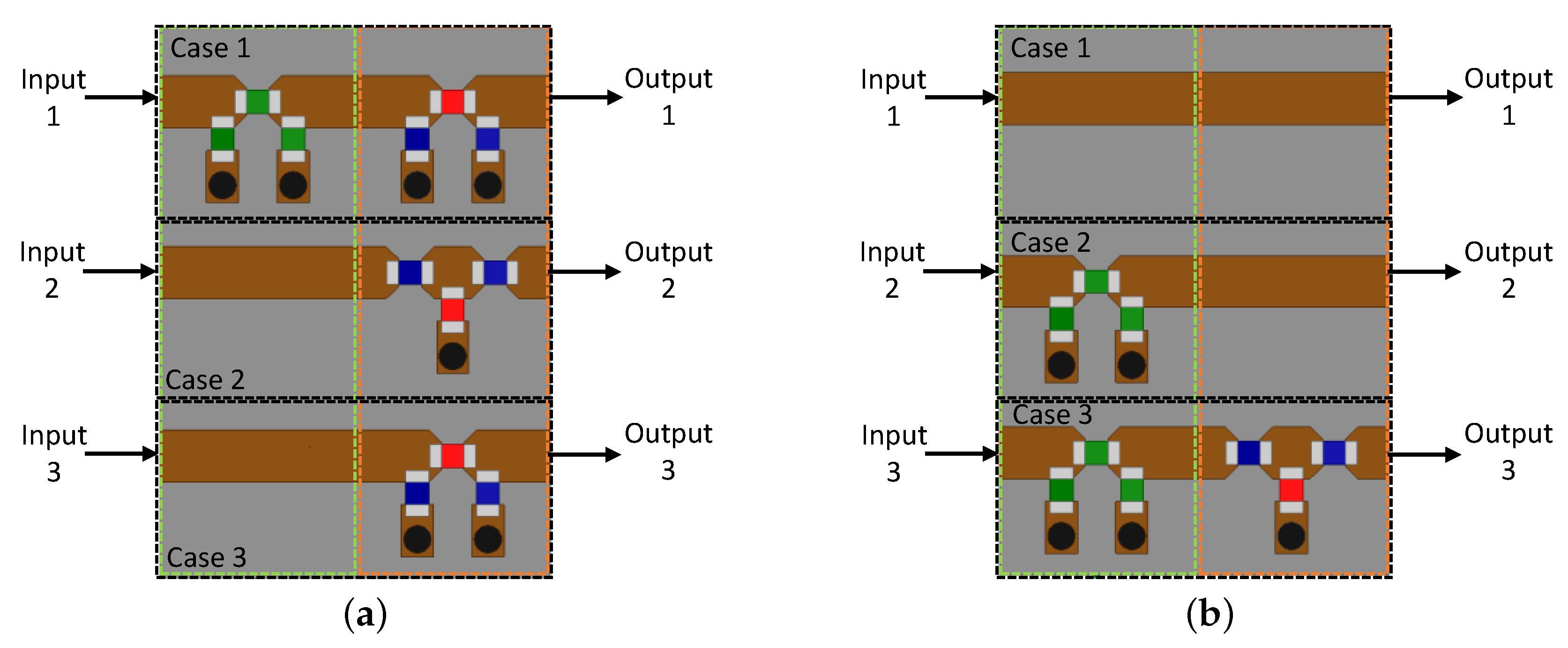
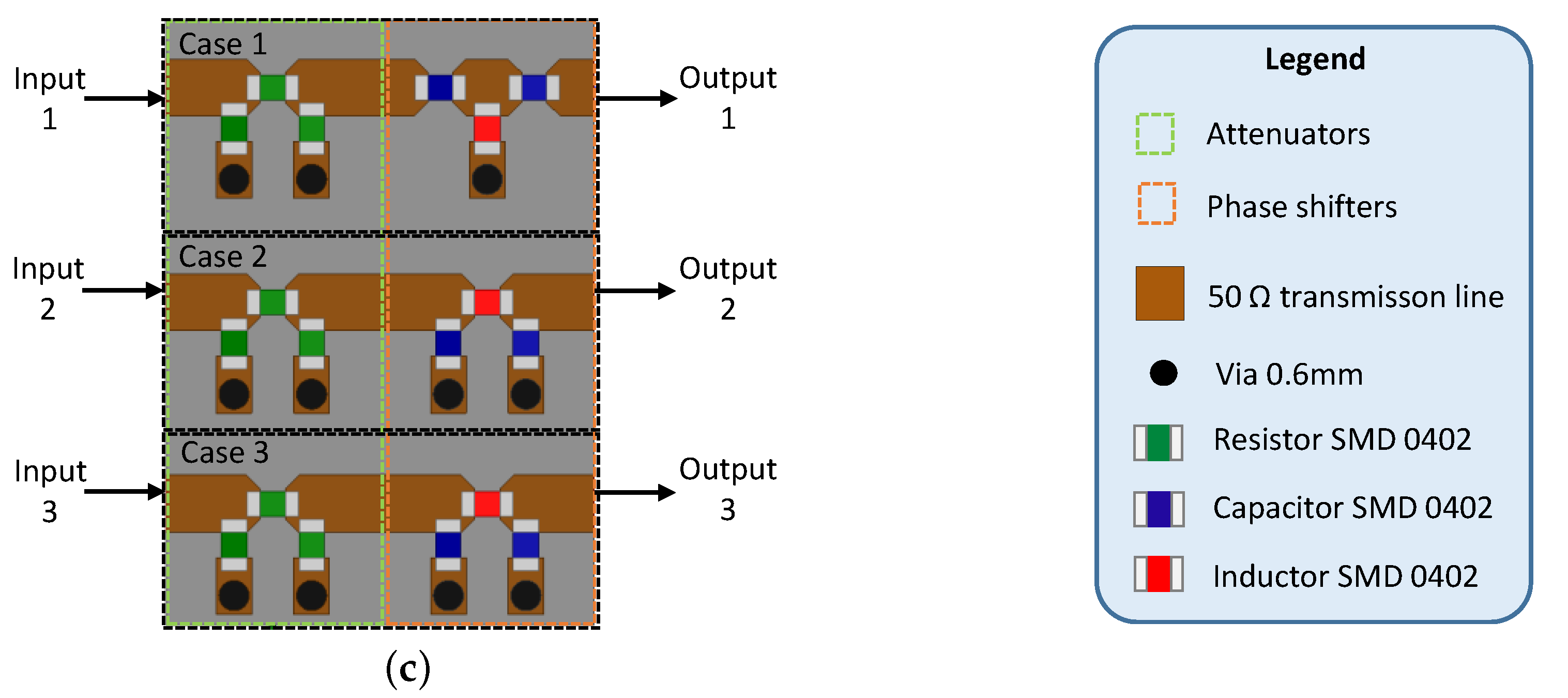
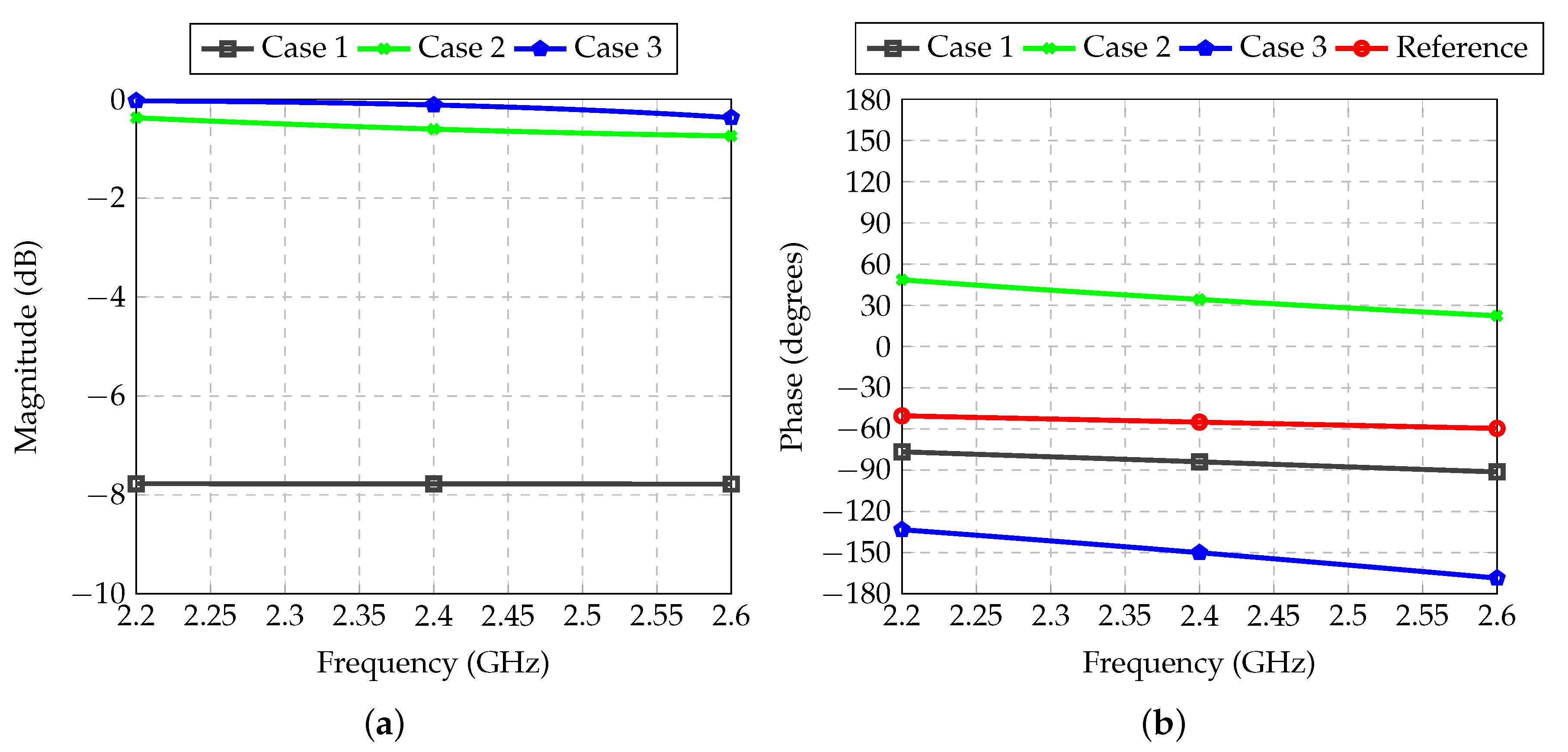
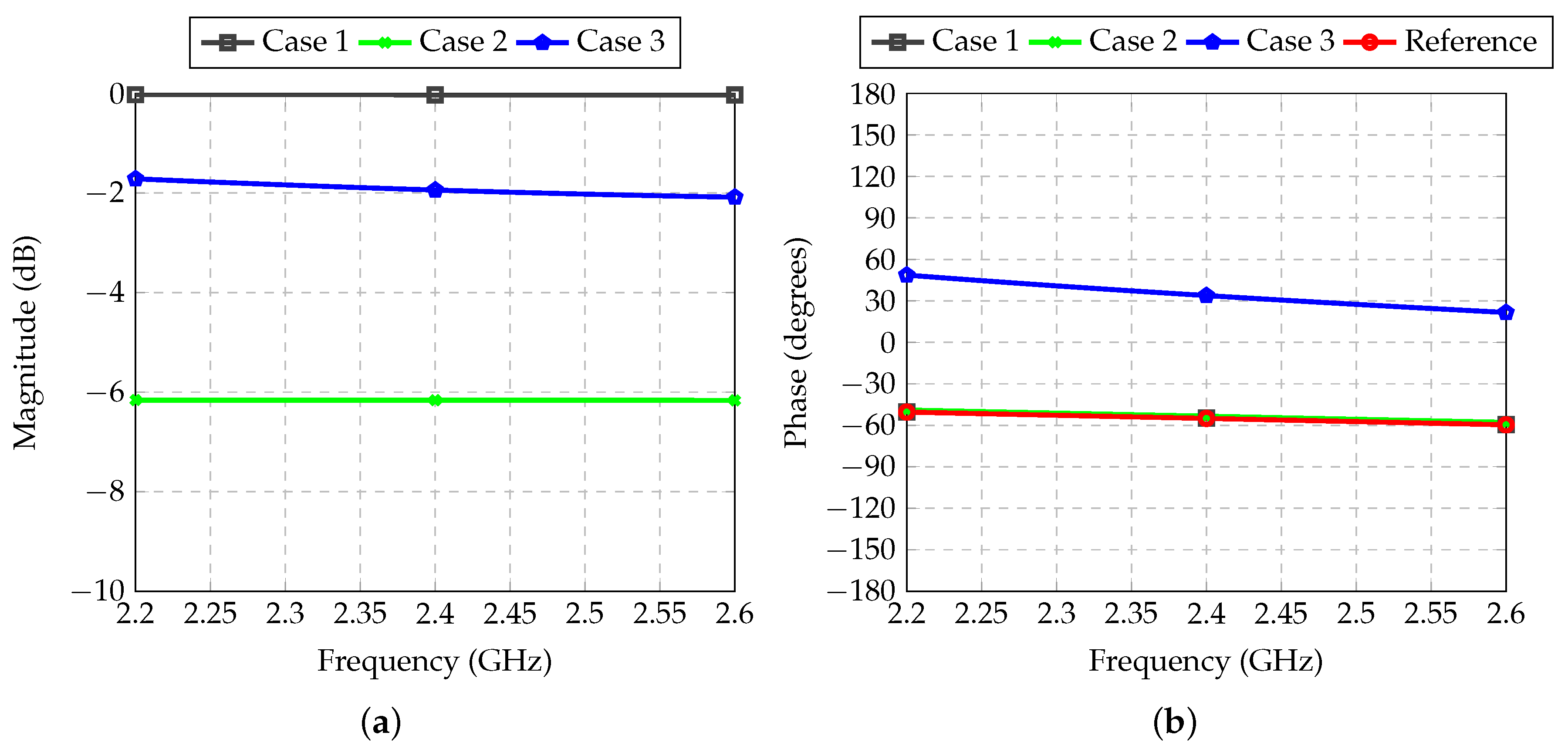
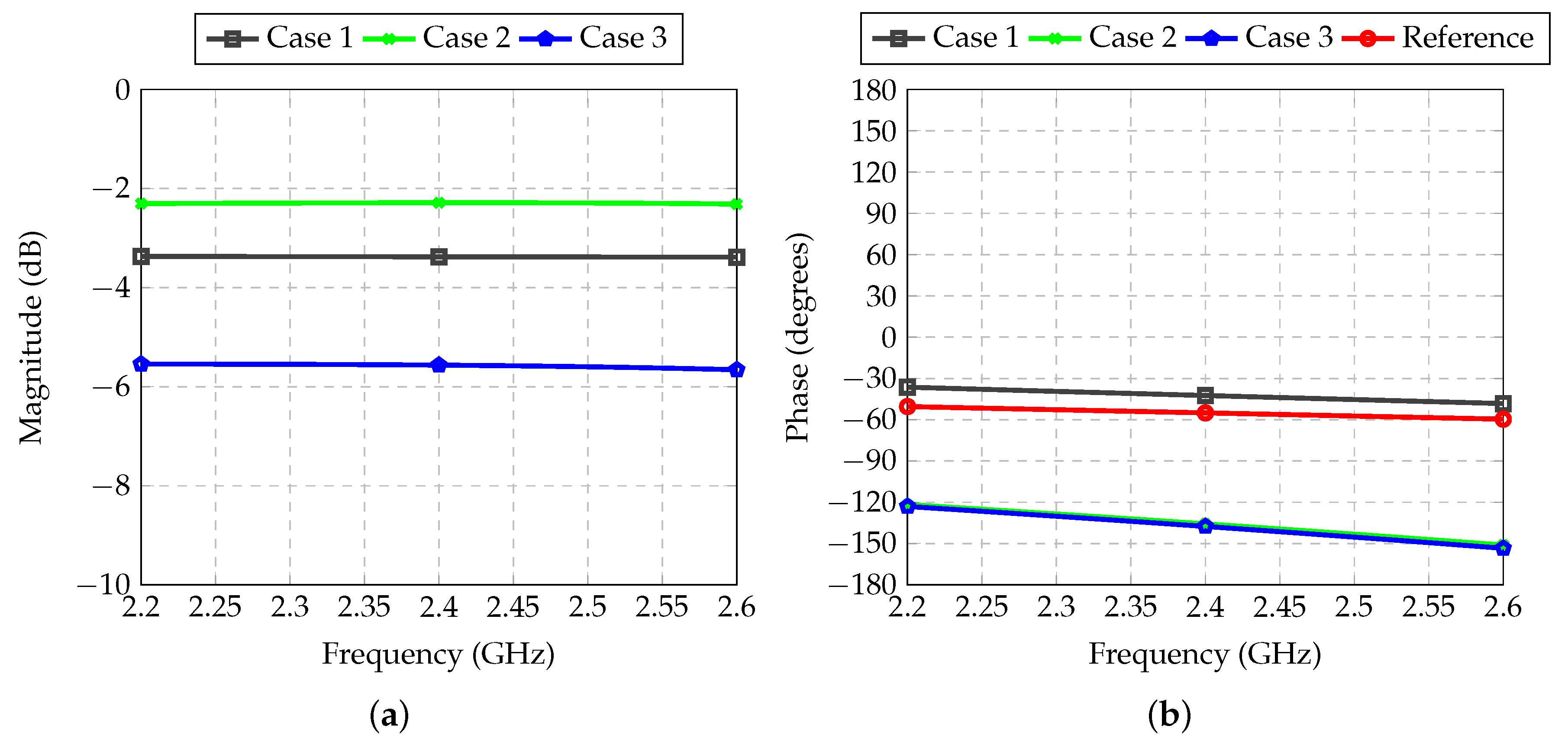
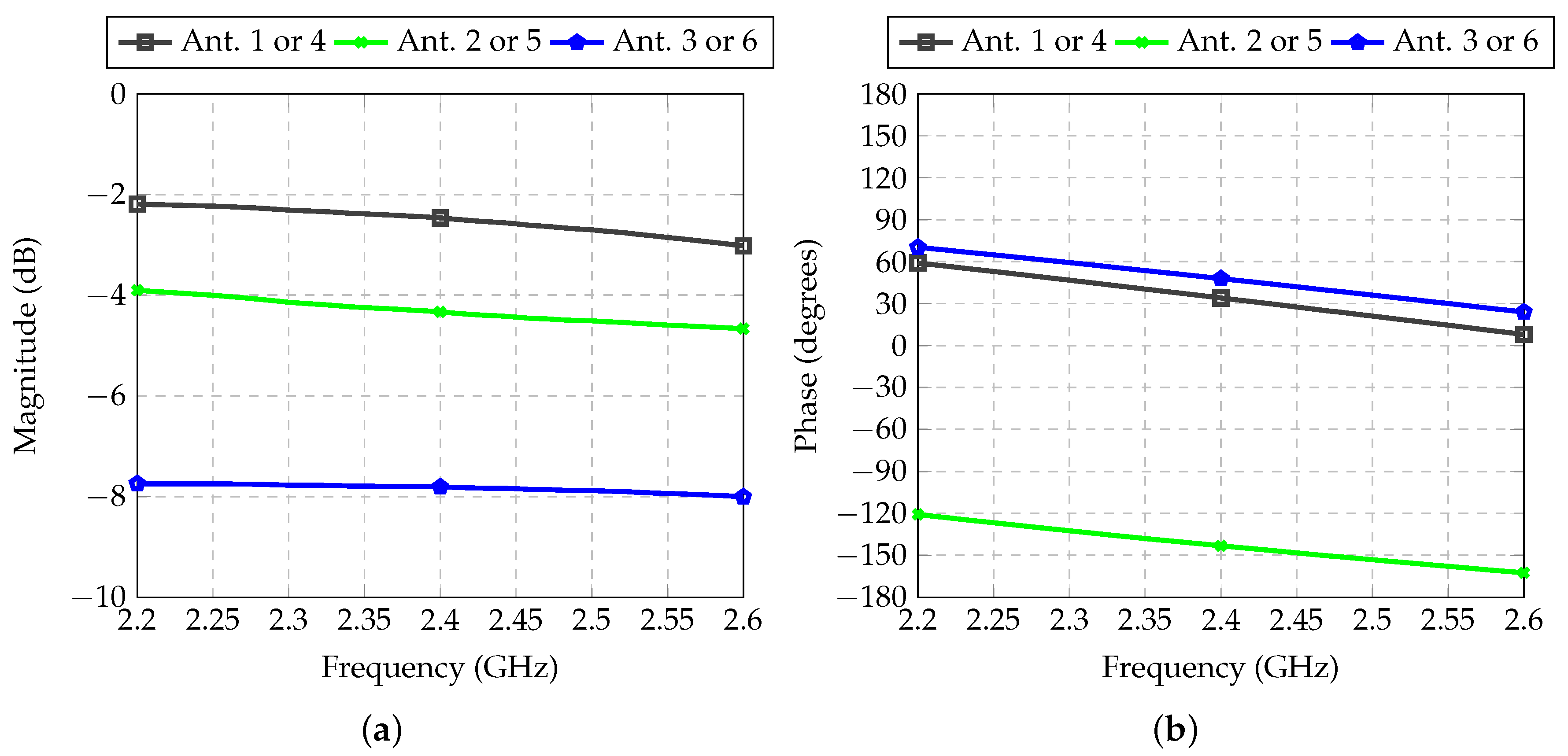
3.2. Design of Feeder for Beamforming
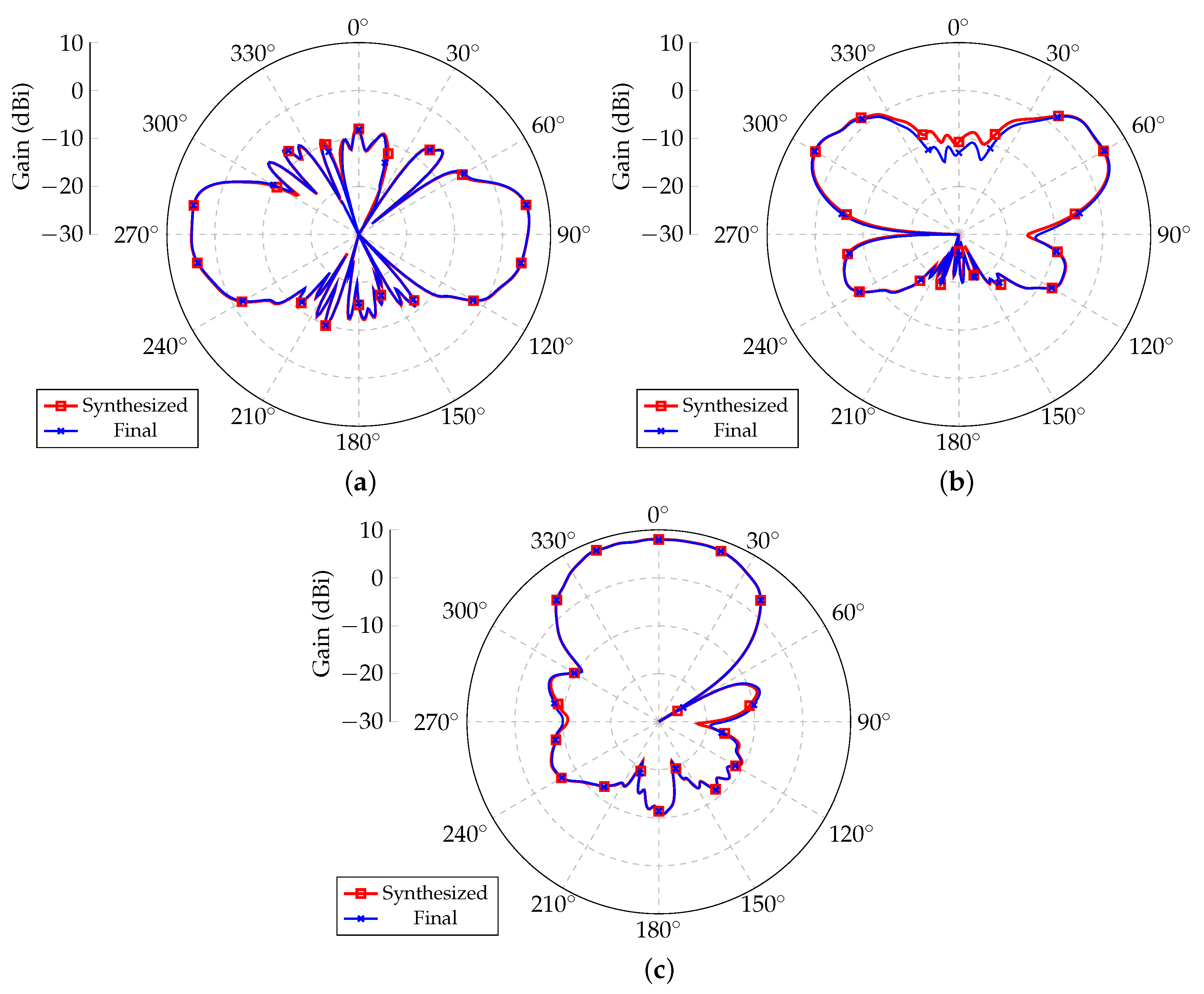
3.3. Final Radiation Patterns
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| PSO | Particle swarm optimization |
| RF | Radio frequency |
| SLL | Sidelobe level |
| SMD | Surface-mounted device |
| UAV | Unmanned aerial vehicle |
References
- Caizzone, S.; Buchner, G.; Circiu, M.-S.; Cuntz, M.; Elmarissi, W.; Marcos, E.P. A Miniaturized Multiband Antenna Array for Robust Navigation in Aerial Applications. Sensors 2019, 19, 2258. [Google Scholar]
- Patrovsky, A.; Sekora, R. Structural integration of a thin conformal annular slot antenna for UAV applications. In Proceedings of the 2010 Loughborough Antennas and Propagation Conference, Loughborough, UK, 8–9 November 2010; pp. 229–232. [Google Scholar]
- Ibrahim, M.; Deif, S.; Sharawi, M.S. A 14-element printed planar antenna array embedded within a UAV structure. In Proceedings of the Loughborough Antennas and Propagation Conference, Loughborough, UK, 12–13 November 2012; pp. 1–4. [Google Scholar]
- Albagory, Y. An Efficient Conformal Stacked Antenna Array Design and 3D-Beamforming for UAV and Space Vehicle Communications. Sensors 2021, 21, 1362. [Google Scholar]
- Cui, Y.; Luo, P.; Gong, Q.; Li, R. A Compact Tri-Band Horizontally Polarized Omnidirectional Antenna for UAV Applications. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 601–605. [Google Scholar]
- Peng, J.-J.; Qu, S.-W.; Xia, M.; Yang, S. Wide-Scanning Conformal Phased Array Antenna for UAV Radar Based on Polyimide Film. IEEE ANtennas Wirel. Propag. Lett. 2020, 19, 1581–1585. [Google Scholar]
- Sharawi, M.S.; Deif, S.; Aloi, D.N. A planar printed antenna array embedded in the wing structure of a UAV for communication link enhancement. Prog. Electromagn. Res. 2013, 138, 697–715. [Google Scholar]
- Sharawi, M.S.; Rawashdeh, O.A.; Aloi, D.N. Performance of an embedded monopole antenna array in a UAV wing structure. In Proceedings of the IEEE Mediterranean Electrotechnical Conference, Valletta, Malta, 26–28 April 2010; pp. 835–838. [Google Scholar]
- Chen, Y.; Wang, C.-F. Electrically small UAV antenna design using characteristic modes. IEEE Trans. Antennas Propag. 2014, 62, 535–545. [Google Scholar]
- Macnamara, T. Introduction to Antenna Placement and Installation; John Wiley and Sons: London, UK, 2010. [Google Scholar]
- Heckler, M.V.T.; Greda, L.A.; Dreher, A. Analysis of a navigation antenna installed on a civil airplane. In Proceedings of the 2008 IEEE Antennas and Propagation Society International Symposium, San Diego, CA, USA, 5–11 July 2008. [Google Scholar]
- Barka, A.; Caudrillier, P. Domain decomposition method based on generalized scattering matrix for installed performance of antennas on aircraft. IEEE Trans. Antennas Propag. 2007, 55, 1833–1842. [Google Scholar]
- Thain, A.; Peres, G.; Estienne, J.-P.; Sylv, G.; Cailleu, P.; Benjamin, P.; Terrasse, I.; Piau, G.-P.; Sabanowski, G. Numerical modelling of aircraft antenna installations. In Proceedings of the European Conference on Antennas and Propagation, Edinburgh, UK, 11–16 November 2007. [Google Scholar]
- Heckler, M.V.T.; Dreher, A. Performance of microstrip antenna arrays installed on aircraft. Aerosp. Sci. Technol. 2005, 26, 235–243. [Google Scholar]
- Heckler, M.V.T.; Dreher, A. Analysis of monopoles installed on airframes. In Proceedings of the IEEE Antennas and Propagation Society International Symposium, Washington, DC, USA, 3–8 July 2005; pp. 280–283. [Google Scholar]
- Yoshimoto, E.; Schlosser, E.R.; Heckler, M.V.T. Optimisation of antenna arrays installed on non-conductive unmanned aerial vehicle. IET Microw. Antennas Propag. 2018, 12, 2292–2300. [Google Scholar]
- Rizwan, A.; Biswas, D.; Ramachandra, V. Impact of UAV structure on antenna radiation patterns at different frequencies. In Proceedings of the 2017 IEEE International Conference on Antenna Innovations and Modern Technologies for Ground, Aircraft and Satellite Applications (iAIM), Bangalore, India, 24–26 November 2017. [Google Scholar]
- Samaiyar, A.; Abdelrahman, A.H.; Boskovic, L.B.; Filipovic, D.S. Extreme Offset-Fed Reflectarray Antenna for Compact Deployable Platforms. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 1139–1143. [Google Scholar]
- Pozar, D.M. Microwave Engineering, 3rd ed.; John Wiley and Sons: New York, NY, USA, 2005. [Google Scholar]
- Silva, L.L.; Vieira, J.M.; Yoshimoto, E.; Heckler, M.V.T. Study of phase-shifters in S-Band using lumped elements. In Proceedings of the XXXVII Brazilian Telecommunications Symposium, Petrópolis, Brazil, 29 September–2 October 2019. [Google Scholar]
- Buttazzoni, G.; Babich, F.; Vatta, F.; Comisso, M. Geometrical Synthesis of Sparse Antenna Arrays Using Compressive Sensing for 5G IoT Applications. Sensors 2020, 20, 350. [Google Scholar]
- Hasan, M.Z.; Al-Rizzo, H. Beamforming Optimization in Internet of Things Applications Using Robust Swarm Algorithm in Conjunction with Connectable and Collaborative Sensors. Sensors 2020, 20, 2048. [Google Scholar]
- Robinson, J.; Rahmat-Samii, Y. Particle swarm optimization in electromagnetics. IEEE Trans. Antennas Propag. 2004, 52, 397–407. [Google Scholar]
- Greda, L.A.; Winterstein, A.; Lemes, D.L.; Heckler, M.V.T. Beamsteering and beamshaping using a linear antenna array based on particle swarm optimization. IEEE Access 2019, 7, 141562–141573. [Google Scholar]
- Engroff, A.M.; Girardi, A.G.; Heckler, M.V.T.; Winterstein, A.; Greda, L. ASIP development of a real-time control module for a retrodirective antenna array. AEU Int. J. Electron. Commun. 2019, 109, 31–42. [Google Scholar]
- Schlosser, E.R.; Heckler, M.V.T.; Machado, R.; Tinoco Salazar, A.F. Synthesis and implementation aspects of linear antenna arrays with shaped radiation pattern for mobile communications. IET Microwav. Antennas Propag. 2016, 10, 442–452. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Mode ON | ||
|---|---|---|---|
| 1 | to | Low | High |
| 2 | to | High | Low |
| 3 | to | High | High |
| Case | Antenna 1 or 4 | Antenna 2 or 5 | Antenna 3 or 6 | |||
|---|---|---|---|---|---|---|
| Atten. (dB) | Phase (deg) | Atten. (dB) | Phase (deg) | Atten. (dB) | Phase (deg) | |
| 1 | −7.98 | −30.37 | 0 | 0 | −3.48 | 14.29 |
| 2 | 0 | 87.93 | −6.12 | 0 | −2.26 | −81 |
| 3 | 0 | −96 | −1.93 | 90 | −5.24 | −82.4 |
| Case | Antenna 1 or 4 | Antenna 2 or 5 | Antenna 3 or 6 | |||
|---|---|---|---|---|---|---|
| Resist. () | Ind. (nH) | Resist. () | Ind. (nH) | Resist. () | Ind. (nH) | |
| Cap. (pF) | Cap. (pF) | Cap. (pF) | ||||
| 1 | − | − | ||||
| − | − | |||||
| 2 | − | − | ||||
| − | − | |||||
| 3 | − | |||||
| − | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
dos Santos, L.C.; Schlosser, E.R.; Heckler, M.V.T. Low-Cost Beamforming Concept for the Control of Radiation Patterns of Antenna Arrays Installed onto UAVs. Sensors 2021, 21, 4265. https://doi.org/10.3390/s21134265
dos Santos LC, Schlosser ER, Heckler MVT. Low-Cost Beamforming Concept for the Control of Radiation Patterns of Antenna Arrays Installed onto UAVs. Sensors. 2021; 21(13):4265. https://doi.org/10.3390/s21134265
Chicago/Turabian Styledos Santos, Leonardo C., Edson R. Schlosser, and Marcos V. T. Heckler. 2021. "Low-Cost Beamforming Concept for the Control of Radiation Patterns of Antenna Arrays Installed onto UAVs" Sensors 21, no. 13: 4265. https://doi.org/10.3390/s21134265
APA Styledos Santos, L. C., Schlosser, E. R., & Heckler, M. V. T. (2021). Low-Cost Beamforming Concept for the Control of Radiation Patterns of Antenna Arrays Installed onto UAVs. Sensors, 21(13), 4265. https://doi.org/10.3390/s21134265