1. Introduction
The use of high explosives as an available source of energy for metal forming started to be prospected as early as in the middle of the last century [
1]. The high explosive hydro forming (HEHF) process consists of holding a metal plate on a die giving the final shape, a vacuum is ensured between the die and the plate. Then an explosive charge is positioned above the plate at a specific distance and the assembly—die and plate and explosive charges—is immersed into a pool. The explosive charge is fired, and the plate is formed due to the mechanical work given by the shock wave resulting from the underwater detonation. In order to obtain the desired final shape, it usually requires time and many trials to find the adapted setting. This iterative process can be time demanding and costly in the case of large metal plates. HEHF has many advantages: the process is not so expensive since the explosive is of a reasonable cost and the forming does not require high cost of maintenance, with respect to maintenance costs of conventional forming processes [
2]. Moreover, shapes that cannot be formed by traditional forming processes, can be achieved with large and thick plates by HEHF, especially in aircraft manufacturing [
3]. For instance, the front of an aircraft cockpit is currently made of several pieces that are costly and tricky to assemble and the result is not as weight efficient as wished. Those parts could be obtained in one thick and large metal plate using HEHF and machining, even considering their double curvature areas. However, the HEHF process is physically complex and needs to be better understood in order to be adapted for specific productions in the frame of industrial plants. Analytical and numerical approaches are needed for the definition of the explosive charge and the dye.
Furthermore, when developing predictive numerical modelling, engineers are coping with a computation time that is dependant of the complexity of the brief and intense phenomenon to be considered, especially for underwater detonation related studies [
4,
5]. For instance, high explosive detonation has a characteristic time below the microsecond, then the underwater shock that reaches the plate in few tens of microseconds and creates a fluid–structure interaction that is not always well implemented in numerical codes and considerably increases the computational time [
6]. Then, the full forming process that lasts few milliseconds remains a challenge in term of formability limit, and finally the bubble made by the detonation products pulsates and generates new shocks in a few tens to hundreds of milliseconds. Thus, to be realistic, the numerical model would require a very dense mesh and, thus, a very short simulation time step to take into account all those physical effects. That is why correlating the computed pressure with analytical solutions during the interaction between the primary shock and a metal part would allow faster HEHF modelling.
To ensure the validation of the mechanical loading deduced from both numerical and analytical approaches, it is necessary to compare them with experimental measurements resulting from HEHF. In the present work, the explosive charge is a very long cylinder. To the author’s knowledge, no relevant analytical solutions are available, in the open scientific literature, for describing the underwater blast and shock propagation resulting from the detonation of long cylindrical explosive charges. Cole [
7] described an underwater explosion for a spherical charge in far field, and his approach is further investigated by Geers and Hunter [
8]. Kirkwood and Beth [
9] proposed in 1942 a model for plane, spherical, and cylindrical shapes in near field cases. It was completed in 2012 by Barras [
6]. A description of an underwater detonation of cylindrical charges in a far field was proposed by Hammond [
10], but only for small length to radius ratios (L/R).
An experimental measurement technique of the over-pressure exerted on the plate during HEHF would allow determining of the mechanical impulse acting on the plate to form. This measurement would be considered as an input data in a weak coupling modelling approach, much less costly in terms of computational time.
The aim of this article is thus to propose first a measurement method of the primary shock impulse (maximum pressure and positive phase duration) induced by underwater explosion of detonating cords above the surface of an immersed metal anvil in a HEHF pool. Due to the complexity of the measurement of such interaction, and for experimental reasons, a piezo-electrical polyvinyliden fluorid polymer (PVDF) shock gauge [
11] was implemented as a dynamic pressure sensor on the loaded surface of the metal plate to form. This technique has been successively used for field pressure measurement in dry conditions, in aeronautic applications [
12] involving low pressure and also in plate impact experiments [
13] with much higher pressure. In most papers dealing with dynamic pressure measurement, the method of interpretation from voltage to pressure is most of the time masked. The present paper gives details of sensor implementation and signal interpretation. The second objective of this work is the validation of numerical modelling—of underwater shock wave acting on thick and large metal plate—performed with two different commercial codes—SPEEDv3.1
® —(Numerics Gmbh) based on computational fluid dynamic (CFD) and—RADIOSSv2017
® —(ALTAIR Hyperworks) that uses a finite element method in an explicit scheme. The third objective is to give analytical interpretations, based on the shock polar technique, of experimental observations carried out on large and thick metal plate. For confidential reasons, the explosive charge and pool details are not evoked. Thus, all time, pressure, and distance results implying the explosive are dimensionless.
2. Materials and Methods
2.1. PVDF Sensor Description and Implementation
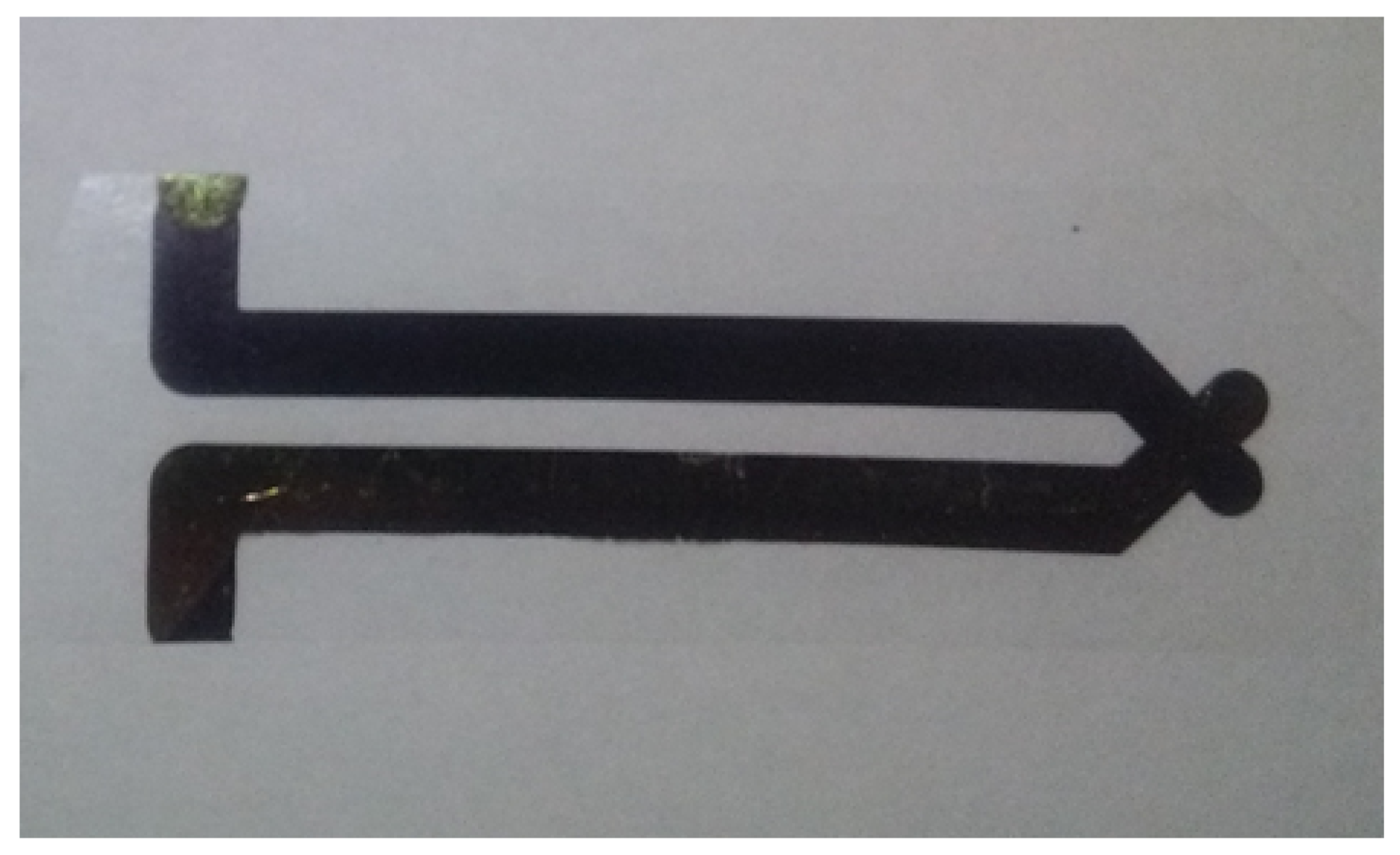
The underwater explosion (UNDEX) pressure measurements are performed in the HEHF pool of the 3DMF company, using PVDF made pressure sensors. Pressure sensors are composed of thin film PVDF (25 μm, Bauer S25 PVDF shock gauge) designed for shock pressure measurement (
Figure 1). The reported maximum measured pressure is higher than 30 GPa [
14] and the response time is of the order of the nanosecond. They are currently used for blast [
15] and shock pressure measurement [
16,
17], they have been described by F. Bauer [
14]: the PVDF semi-crystalline polymer is mechanically stretched and polarised under the effect of a high voltage electric field in order to obtained a calibrated piezo-electric effects described in
Figure 2.
The intersection of the two conductive leads (gold or aluminium sputtered on the PVDF polymer) constitutes the measurement zone of the gauge. The use of a gauge having a 25 mm
measurement surface allows having more electrical charges per surface unit than it is collected with the
Bauer shock Gauge presented in [
14]. As a consequence, the amplitude of the measured signals and, thus, the accuracy of the measurement is valuable in the case of a planar contact between the shock wave and the active surface of the PVDF gauge. However, for brief mechanical impulses with a very curved front wave, the measurement may remain questionable.
The PVDF gauge is also a broadband antenna that may explain an unwanted triggering during tests due to its sensitivity to electromagnetic and capacitor parasites. Electromagnetic shielding of the gauge is then recommended to prevent these from random triggering. Thus, the gauge is sandwiched between two layers of 25 μm thick non-polarised PVDF tape, as dielectric media, and then covered with a thick aluminium adhesive tape on both side and grounded as electromagnetic shield.
Under stress, the gauge provides electrical charges that are collected by the electrical line from the PVDF sensor to the oscilloscope. The collected amount of electrical charges is not only a function of the applied pressure, polarisation and active surface but also depends on the acquisition line (cable characteristics, oscilloscope impedance, and capacitance inputs…). The collected electrical signal is interpreted knowing the calibration of the sensor and its implementation in the acquisition line. It is possible then to deduce the loading pressure.
At least three implementations of the PVDF based pressure sensor have been tested depending of the characteristic time of the mechanical loading to be measured and the acquisition chain. The “current mode” consists in measuring the voltage through a “Current Viewing Resistor” (CVR) implemented as a shunt resistor between the gauge leads. This setup is used when the rise time of the measured signal is greater than the product of the resistance R and capacitance C of the equivalent electrical circuit, including R and C values of the acquisition chain. In other cases, the PVDF gauge is implemented as “voltage mode” in which the voltage is directly measured between leads, without CVR. An alternative method for long impulses involving frequencies lower than 150 kHz is the use of a charge amplifier.
According to some preliminary numerical simulations, the expected rise time of the pressure peak in the studied case of underwater explosion is estimated to be of the order of one microsecond. The value of the circuit is estimated with the description of the acquisition line: 1 m long extended gauge using conductive copper tape, 2.5 m of cable (102 pF/m), 15 m of low loss cables (78 pF/m) and a digital oscilloscope (input 10 pF/m, 1 MΩ).
Considering the values of each portion of the acquisition chain, the product is then estimated:
R#1 M
C # 1500 pF
# 1.5 ms
The
value of the acquisition chain is much greater than the rise time to be measured; then the PVDF gauge was implemented in “voltage mode”, that is to say, the oscilloscope input channel is set in 1 M
impedance. Considering the gauge surface of 25 mm
, as well as the capacitance and the resistance of the acquisition line, the voltage signal is converted into current per surface unit with the relation:
is the electric charge in Coulomb per surface unit, V is the voltage, C is the capacitance, and S is the active area of the PVDF gauge.
Thus, the measured pressure is deduced from relation (1) and
Figure 2.
The uncertainties of measurements of the PVDF gauge in an underwater environment are deeply discussed in [
18]. Another advantage of using PVDF gauges, they are movable and can also be implementable under the form of an array for field pressure measurement [
12].
2.2. HEHF Experiments
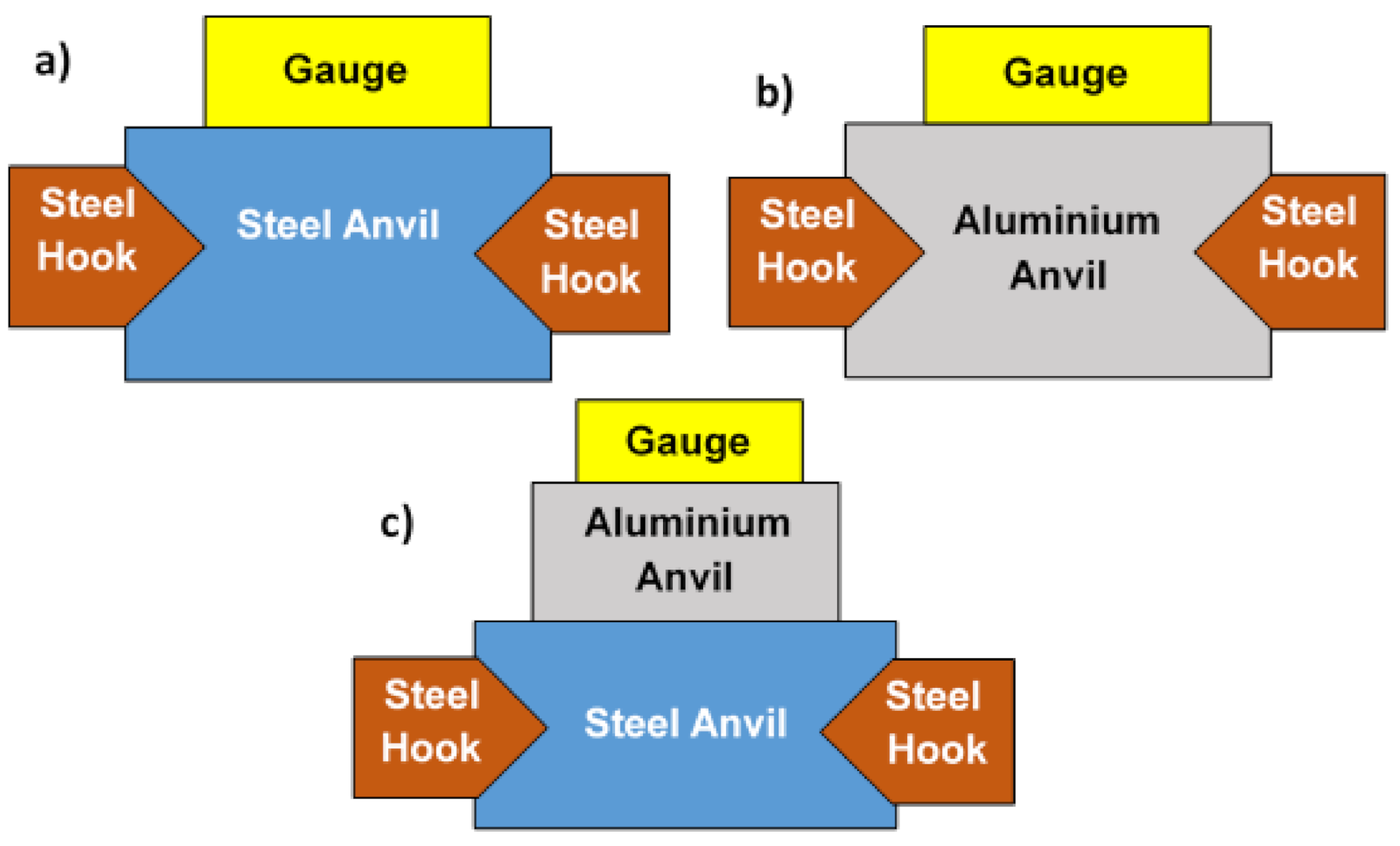
Plastic posts are positioned normal to the steel anvil to hold detonating cords at a chosen stand-off distance (
Figure 3). The explosive charge length is chosen long enough to avoid detonator and extremities effects, and to ensure that the detonation wave propagates at a constant velocity.
The acquisition chain can be triggered by two different ways. In the first one, the trigger level is adjusted to an estimated voltage deduced by the pressure which is calculated by numerical modelling or analytical consideration. This trigger option allows recording long duration until the bubble pulsation. The second one is to use the external trigger of the oscilloscope: it is directly connected to the electrical wires of the firing system that ignite the detonator. The delay between the electrical signal and the detonation time was measured to be around half a millisecond. This trigger option allows an estimation of the travel time from the explosive charge to the plate. Then, the sensor is stuck with double layer adhesive tape on the metal plate. Two sensor locations were chosen with respect to the explosive charge: (1). below, (2). with a lateral offset. The first configuration was used to determine the pressure as a function of stand-off distance vertically above the gauge and the second configuration to show the presence of a Mach stem.
2.3. Analytical Method
This section provides an analytical interpretation of recorded signals by considering the physics of underwater explosion and shock waves. When the detonation is triggered, a detonation wave propagates through the explosive charge. The detonation then reaches the water–explosive boundary. A shock is then transmitted into the surrounding water and propagates over the stand-off distance before striking the PVDF sensor. After a certain distance of several times the charge diameter, the shock front is assumed to be planar with respect to the active area of the sensor. The shock wave is then transmitted from the water to the aluminium shield layer of the sensor, then from the aluminium shield to the PVDF core, then to aluminium shielding of the other side, from the shield to the double-sided adhesive tape and finally to the metal plate to be formed. This situation is represented in
Figure 4 showing a space-time diagram of the wave propagation in the sensor assembly (without the double sided adhesive tape) with corresponding states in a ‘Pressure–material velocity’ diagram detailed in what follows.
The simplified 1D analytical approach based on the theory of shocks in a condensed phase, described in [
19], is given. In order to minimise the effects of hydrodynamic attenuation during the shock wave transit through surrounding water, only the interaction with the PVDF sensor, assuming a planar impact of the shock front on the gauge, is considered. In that case, the sensor is considered stuck on a steel plate. The assumption of a constant pressure step equivalent in impulse to the real pressure loading is made. This assumption makes possible the use of the shock polar technique: Pressure-particle velocity (P-u) diagram gives the accessible states of a non-reactive material under shock load, which is obtained by using the Rankine-Hugoniot equations [
19]. Thus, the shock polar equation of a material of interest is given by the relation:
where
P is comparable to the spherical content of the stress tensor in the material,
is the material density,
is the material bulk sound velocity,
s is a material parameter given in the shock equation of state (EoS) Equation (
3) with
D the shock velocity,
and
are, respectively, the particle velocity under shock and at initial state (at rest).
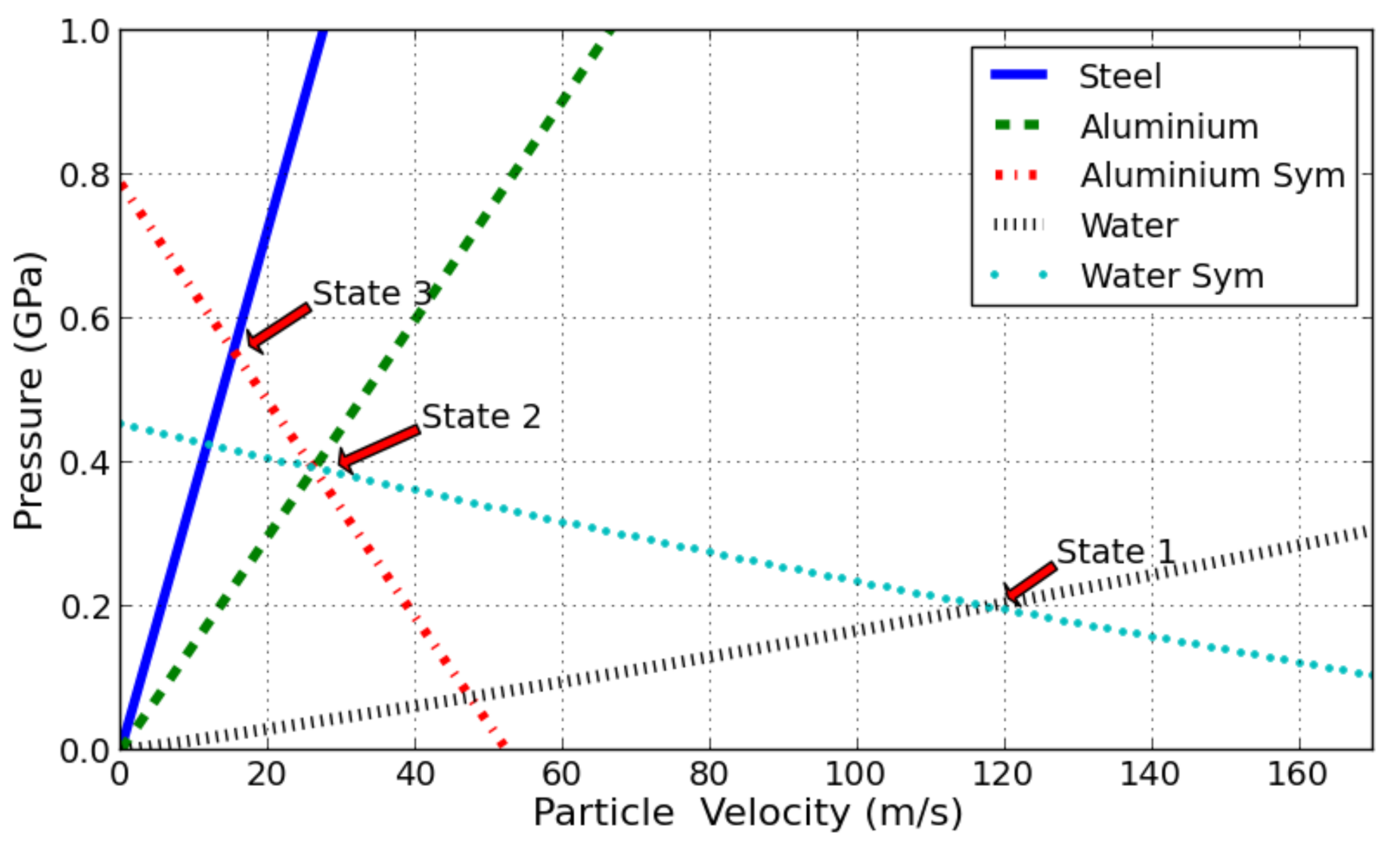
The phenomenon can be better understood when described in a space-time diagram (
Figure 4) and in a pressure-material velocity diagram (
Figure 5). It is first assumed that PVDF and tape have the same acoustic impedance
and of a negligible thickness compared to the aluminium shield. The shock coming from the water induces a pressure loading when impacting the sensor assembly stuck on the metal plate. During this interaction, the shock is reflected into the water and transmitted into, first, in the aluminium layer of the sensor assembly. As a consequence, the pressure state in the water and the aluminium is marked as state n°2, it corresponds to the intersection of their respective shock polar in the ‘pressure-material velocity’ diagram.
It can be seen, in such a construction, that the series of reflected waves in such assembly converge towards the state that would be without the mounted sensor. In other words, the presence of PVDF has a limited impact on the maximum pressure measurement with respect of the loading duration in this case. According to this observation, it is no longer needed to consider PVDF or adhesive tape in the shock polar approach. This will simplify the understanding.
In such a situation, the shock transmitted to the aluminium shield is then transmitted to the steel anvil and reflected in the aluminium shield. The resulting pressure states are given in
Figure 5. The two materials then reach state noted n°3 (
Figure 5). This pressure is the pressure measured by the gauge.
This observation means that the pressure measured by the PVDF gauge is not directly the incident pressure induced by the explosion. In order to evaluate this pressure, it is then necessary to come back again to
Figure 5. The pressure states corresponding to intersection points can be found by solving the equations of the shock polars. To achieve it, a Matlab
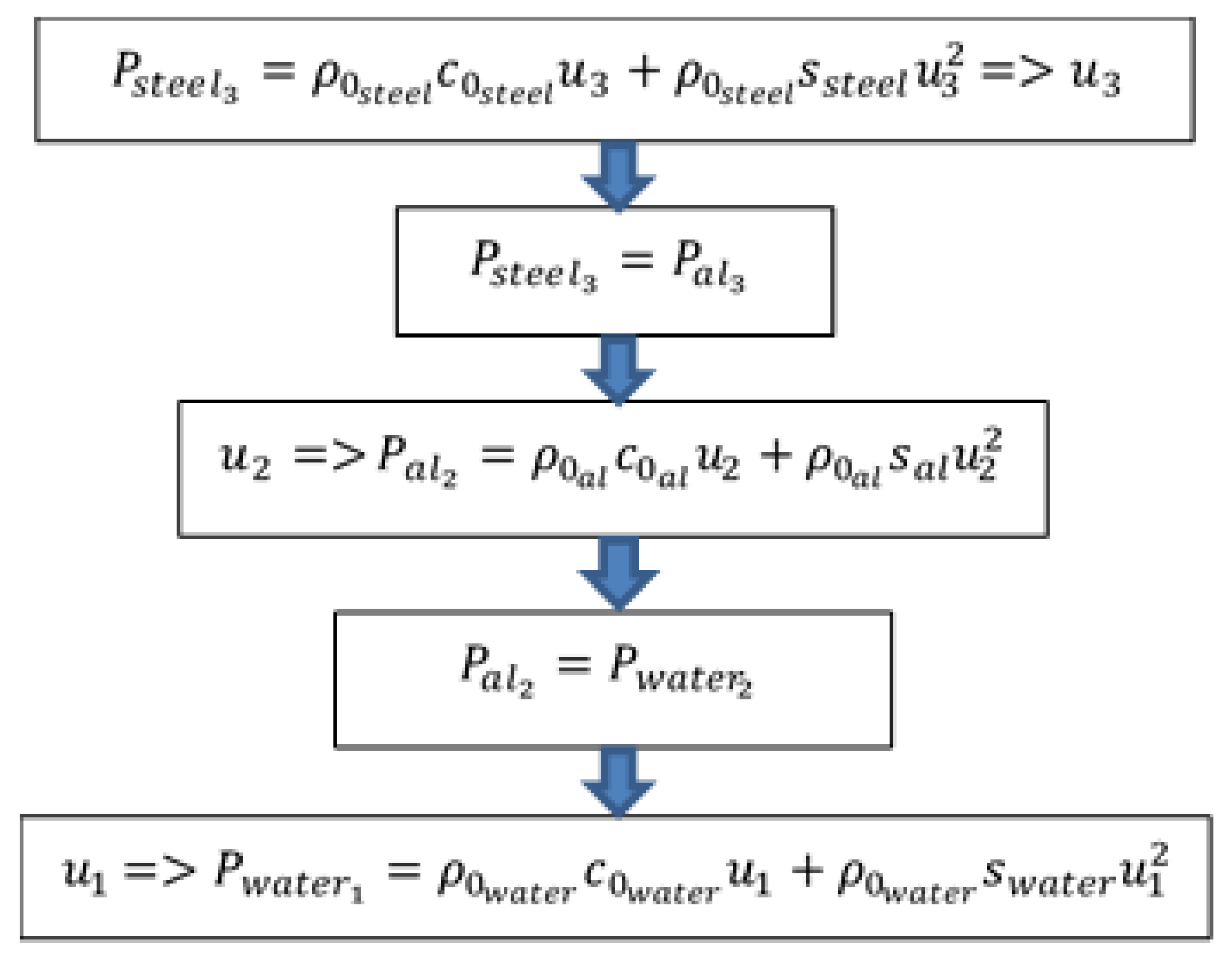
® numerical file was coded; it calculates the value of the incident pressure knowing the value of the measured pressure peak. Indeed, state 3 results from the interaction of a shock coming from aluminium shield and transmitted into steel. According to the planar shock interaction, pressure induced by the shock will be equal in steel and aluminium.
and
are, respectively, the pressure of steel and aluminium under shock at state 3. Then, by using the equation of shock polar Equation (
2), the following equations are obtained:
,
,
,
,
and
are, respectively, the density, sound velocity, and shock material parameters of steel and aluminium,
and
are, respectively, the particle velocity at state 3 and state 2. The steel pressure under shock has previously been determined, thus
can be calculated with relation (5) or evaluated with
Figure 5. Then, knowing
, the particle velocity at state 2
can be determined with relation (6). Thus, aluminium pressure at state 2 can be calculated with the equation of shock Equation (
2), and then same work is performed with state 2 instead of state 3. Thus,
can finally be obtained and the incident pressure can be found with shock polar equation in
Figure 6. Common isentropic approximation is made here, atmospheric pressure is neglected, and reflected waves are supposed to follow symmetric of Hugoniot in P-u plane. It is an usual first order approximation to simplify calculation [
20,
21].
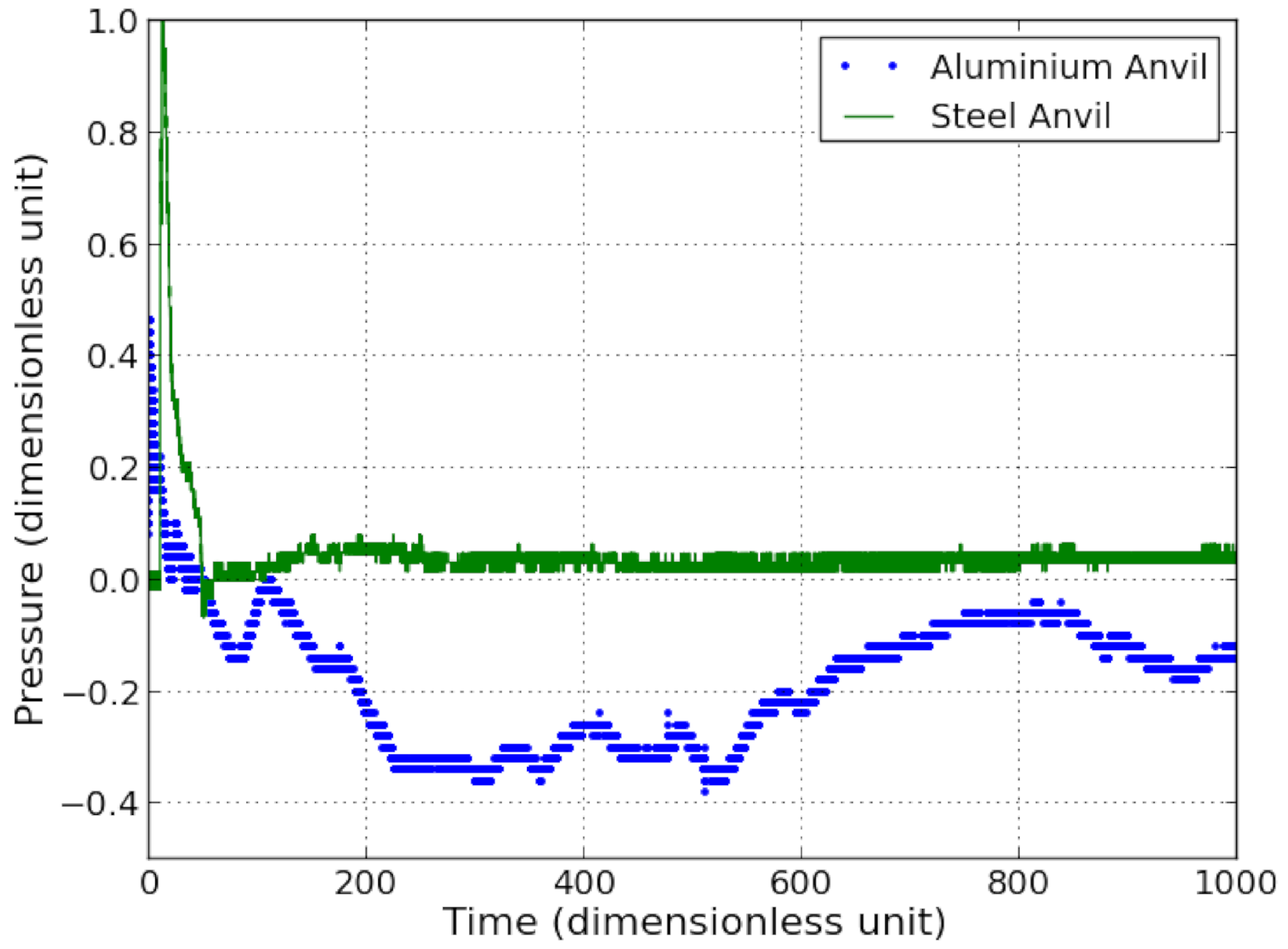
Thus, during a shock/plate interaction, from a PVDF pressure measurement on a material such as steel, it is possible to determine the incident pressure at a given distance from the explosive charge, and from this incident pressure it is possible to deduce what would be the pressure transmitted in any other material such as an aluminium alloy, for example. Since state 2 does not depend on the nature of the anvil, this method allows measuring the pressure loading for anvils made of any kind of materials.
4. Discussion
In order to estimate the relevance of using PVDF shock gauges for dynamic pressure measurement during underwater explosion of a detonating cord, refined numerical modelling were performed. Two commercial computational codes have been used in this study: SPEED® and RADIOSS®. Shock physics explicit Eulerian/Lagrangian dynamics (SPEED®) is developed by Numerics Gmbh, and has capability to perform 2D and 3D multi-material Eulerian simulations, 2D Lagrangian models and 3D ideal gas calculations. It is based on an explicit solver for non-linear problems and is proficient for shocks and explosion analysis. In addition, an adaptive mesh, and mesh activation method are implemented and are revealed to be very efficient for saving computational time. RADIOSS® is an ALTAIR® code based on a finite element method using an explicit solver, mainly for crashes and multi-physics analysis. It has multiple possibilities such as Eulerian, Lagrangian, Arbitrary Langrangian Eulerian (ALE), Coupled Eulerian-Lagrangian (CEL) and Smooth Particles Hydrodynamics (SPH) simulations in 2D and 3D.
Firstly, to ensure the accurate modelling of underwater explosion, mesh sensitivity is studied. Then, the full PVDF sensor is modelled and the pressure impulse is compared with the measurement. Finally, the correlation between measured overpressure from 40 to 100 radii from the centre of the explosive and the simulation is attempted.
For the following simulations the detonation point is set at the centre of the explosive and all the borders of the domain are set as transmissive. Transmissive boundary conditions permit the flow to go in and out of the mesh, and allow to model continuous flow. It is aimed to limit shock reflection on the boundaries. The constitutive law used for PVDF and water is SPEED
® shock EoS based on Mie-Grüneisen and shock EoS. SPEED
® Johnson-Cook constitutive law (a combination of shock EoS and visco-elasto-plastic and fracture Johnson-Cook models) is used for aluminium (AA2024-T351) and steel (Steel 1006) [
24,
25]. The material parameters for shock EoS are mentioned in
Table 1—for aluminium, steel and water—and in
Table 4 for PVDF. The explosive is modelled using the Jones-Wilkins-Lee (JWL) equation of state [
26]. The JWL equation of state corresponds to the equation of state of detonation products. It is an usual formulation for dealing with detonation by numerical modelling, implemented in numerous software, under this formula:
A,B,,, and are JWL parameters depending on the explosive, E is the energetic material energy. V is defined here as the ratio between the initial explosive density and the detonation products density . These parameters govern the expansion of the bubble induced by expansion of detonation products. For confidential reasons, the set of JWL parameters is not given.
In SPEED
®, the EoS is defined by a linear relation used to calculate the Hugoniot pressure with the shock Equation (
3), as explained in SPEED
® reference guide:
is the pressure on the shock Hugoniot depending on the density, such as:
.
and
are, respectively, the shocked material density and the reference material density. Then the Hugoniot internal energy
is obtained knowing the reference internal energy
:
The pressure
P at an arbitrary state is described as follow, with
e the internal energy:
with the Grüneisen coefficient gamma
that depends on volume, and reference Grüneisen coefficient
:
In addition to that, if
, the pressure is defined as:
The temperature curve reference used to calculate the temperature is the Hugoniot:
T is the material temperature, is the Hugoniot temperature, is the specific heat capacity at constant volume.
is defined as the solution of the following differential equation, where
is the specific volume:
In RADIOSS
®, the hydrodynamic pressure
P of an element can be calculated using a polynomial expression as explained in its reference guide:
Here
,
is the internal energy per volume unit. For condensed phase, the cubic Hugoniot Equation (
17), Mie-Grüneisen Equation (
11) and energy conservation Equation (
10) equations are used:
By substituting Equations (17) and (10) in Equation (
11), polynomial coefficients can be identified as:
The Johnson-Cook model gives the material flow stress
Y depending on strain rate, strain and temperature:
A, B, C, n and m are Johnson-Cook coefficients. is the plastic strain, and are, respectively, the strain rate and reference strain rate, T and are, respectively, the material temperature and melt temperature. is the room temperature.
The mesh convergence study is performed with SPEED
® software. An explosive cord is placed in the centre of a 90 charge radii square computational domain of water and a numerical gauge is put at 40 charge radii from the centre of the explosive (
Figure 12). All mesh elements are squares. The mesh sensitivity of the model is studied and the element size was fixed to 2 mm for the coarser model, to 0.05 mm for the finest one. The pressure history during wave propagation from the detonating cord is monitored (
Figure 13) by implementing numerical sensors placed in the mesh.
The maximum pressure observed with a 2 mm and 1 mm element size mesh are about the same: 0.22. However, the impulse with an element size of 2 mm is greater. By lowering the element size to 0.5 mm, the maximum pressure is about 0.29: it is a 32% percent increase with respect to the 1 mm maximum pressure. Dividing again the element size by 2, the maximum pressure still increases up to 0.34: it is about 17% more than the 0.5 mm pressure. Even with smaller element size the pressure continues to rise to 0.4 and 0.44, respectively, for 0.1 mm and 0.05 mm element size which represents more than a 10% increase, and it is not negligible. The computed peak of pressure shows that a 0.1 mm mesh element size is still not converging to pressure obtained with a 0.05 mm element size. However, with a 2D mesh, dividing the element size by 2 means that the quantity of elements in the model is multiplied by 4. Thus, smaller mesh element size yield obviously to a better description of the over-pressure versus time, but higher computation time. Although the maximum pressure is noticeably higher, the impulse gain is not that big: depending on the case, the additional computation time could be not worthy. Moreover, the pressure is possibly not realistic when closer to the cord but could be relevant at a longer distance with larger element size, this has been described in [
27].
To check the correlation between measurement and simulation, the measurement process is simulated (
Figure 14). The sensor is then modelled and a numerical pressure gauge is placed at its centre. The 2D explicit simulation is performed using the SPEED
® software, with quad elements of size of 100 μm.
Computed and measured pressures are compared in
Figure 15. Some differences are observed and for which some explanations are given. The actual problem geometry is in 3 dimensions whereas the simulation is in 2D plane (extruded). The element size might not be enough refined to obtain a realistic rise time (only one element in the thickness of PVDF in order to have a reasonable computational time). Nevertheless, there is still an acceptable correlation between maximum pressures (less than 1% of relative difference), which confirms the relevance of the measured pressure. An oscillation with high frequency is observed in the experimental measure. They are attributed to the reflected waves inside the pressure sensor layers. Its period is around 0.25 (dimensionless unit) which gives a length of 1.3 charge radii which is almost the length of the aluminium shield on one side of the sensor. The impulse difference between measurement and simulation can be explained: PVDF is very thin, thus, there are only a few elements in the thickness. The PVDF is crushed when the shock wave goes through the material under intense compression in the simulation. The mesh element does not contain any more PVDF material after few instants but the numerical sensor remains. Thus, there is lost energy during the interaction between materials. Furthermore, the mesh element size is surely not small enough to represent accurately the PVDF behaviour.
From the measurements obtained with one detonating cord and analytical treatment of shock waves in condensed phase, the pressure applied on the sensor can be deduced. A 2 dimensions model is computed with SPEED
® and RADIOSS
®: an explosive is set into a 210 charge radii square domain of water with numerical gauges spaced every 5 charge radii (cf.
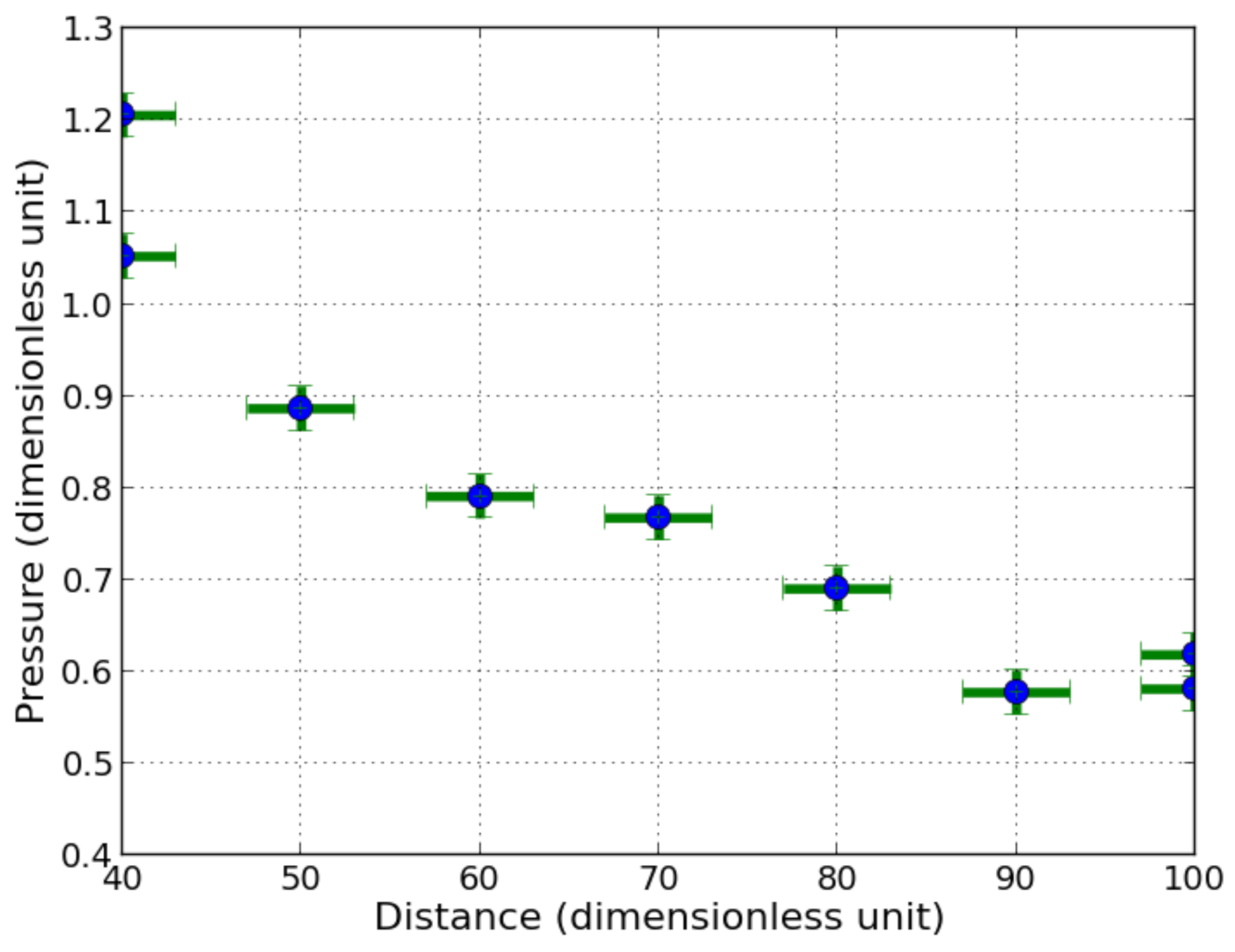
Figure 16). The goal is to compute the peak of overpressure and to compare it with measurements with the analytical method presented in
Section 2.3 to get the incident pressure in a range of 40 to 100 charge radii (cf.
Figure 5 and
Figure 17).
The relative difference between RADIOSS
® and SPEED
® with the measurement is calculated at each distance with respect to measurement values in
Table 5. The relative difference is mainly under 10% up to 90 radii except for one shot at 40 radii. The computed pressure tends to be higher than the measured pressure under 60 radii and under the measured pressure from 70 radii away from the explosive. However, this statement has to be taken carefully since not many shots were performed.
The differences between experiments and simulations can be explained mainly by the element size and numerical dissipation. Indeed, as previously stated, the peak of overpressure continued to increase with the decrease in element size. In order to have a reasonable computation time (less than 24 h with a desktop computer), the size of the elements was set, respectively, to
mm and 0.05 mm in RADIOSS
® and in SPEED
® models. The smaller element size obtained with SPEED
® could be achieved by using the mesh activation feature, saving a lot of CPU time. Both software give similar trends, and are close to the estimated incident pressure from experimental data, except for the longest distances (
Figure 17). An explanation could be that the pressure of elements cannot reach
(Chapman-Jouguet pressure) in the explosive during the detonation stage and could imply not only a reduction in pressure at the source but also a dissipation of energy due to the phenomena of numerical dissipation (
Figure 13) for the longest distances. The method for estimating the incident pressure could also contribute to discrepancies since it is based on the 1D approximation.
The pressure measurement of underwater explosion using a PVDF based pressure sensor gave realistic results. However, the gauge remains intrusive and multiple shock reflections within its constitutive layers can be noticed on the measurements. It has been discussed that both experiments and numerical simulations cannot correlate perfectly due to the intrusiveness of the sensor and assumptions made for the numerical modelling. Nevertheless, the amplitude of shock pressure is overestimated by the numerical modelling while the stand-off distance remains below 65 charge radii and under estimated further. Largest discrepancies of calculated incident pressure with respect to the measurement remain around 15%. The first phenomenon observed is a large discrepancy on impulse, mainly due to insufficiently small mesh size. Thus, energy loss appears in computation and will results in large differences in forming prediction.


 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}