
A Combined Model and Data-Driven Approach for the Determination of Rotor Temperature in an Induction Machine


Abstract
:1. Introduction
- The algorithm consumes data that is already available on most standard architectures of power electronics used in electric machine control (i.e., phase currents sensors, stator temperature sensor, position, and speed encoder).
- The method does not require additional components (e.g., real-time precision impedance measurement, search coils, etc.)
- The method is not invasive and does not alter the control commands to the electrical machine.
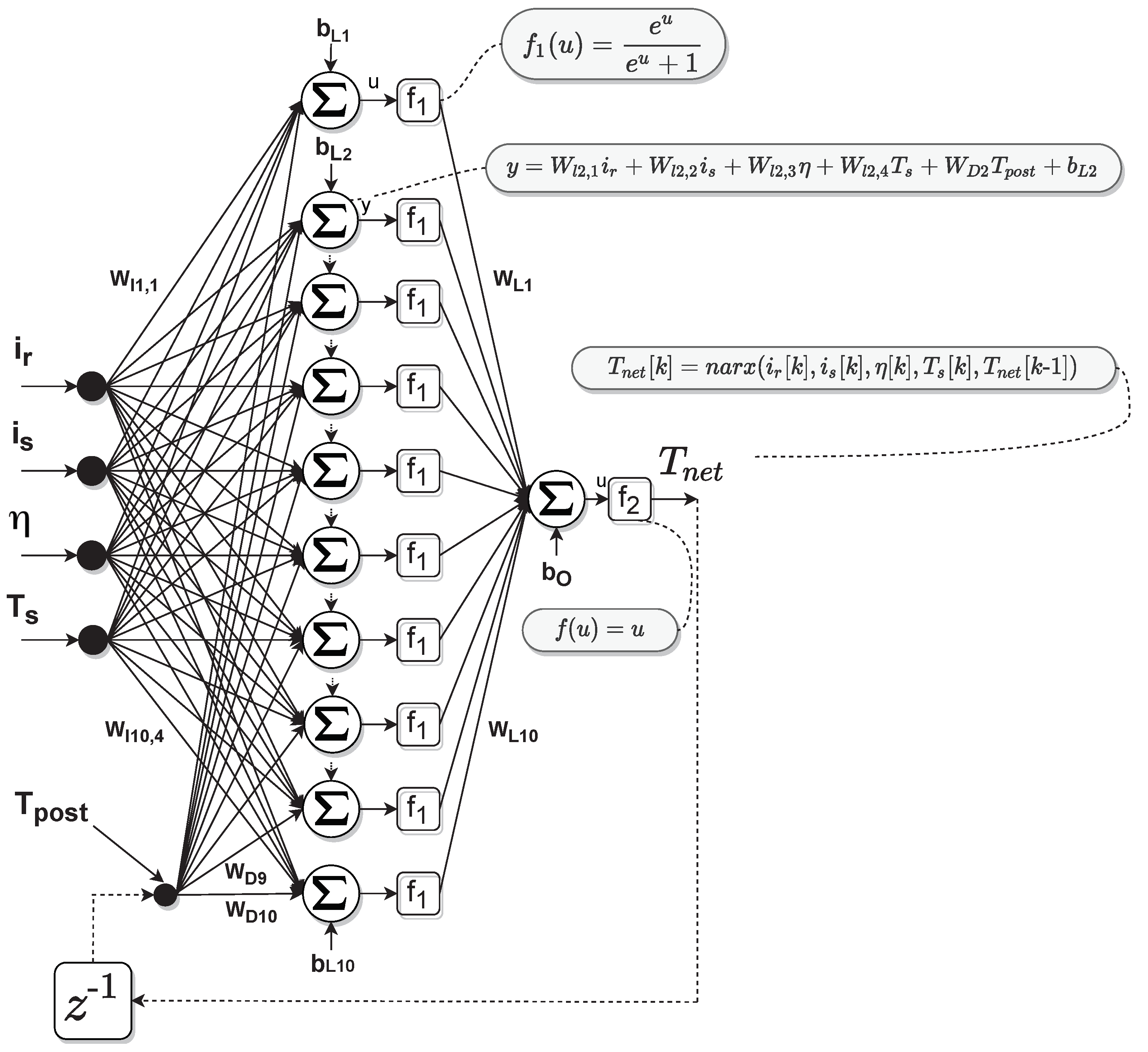
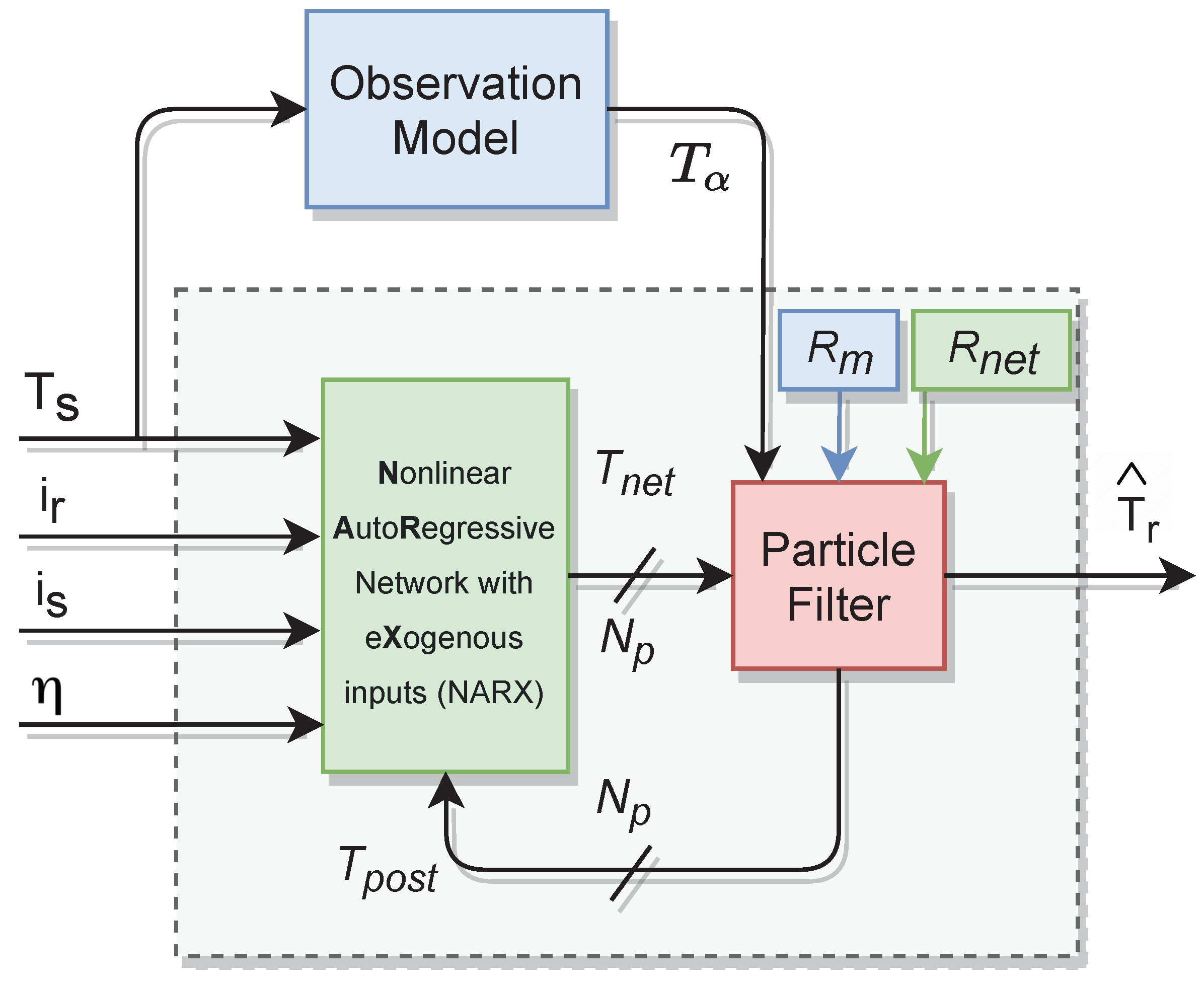
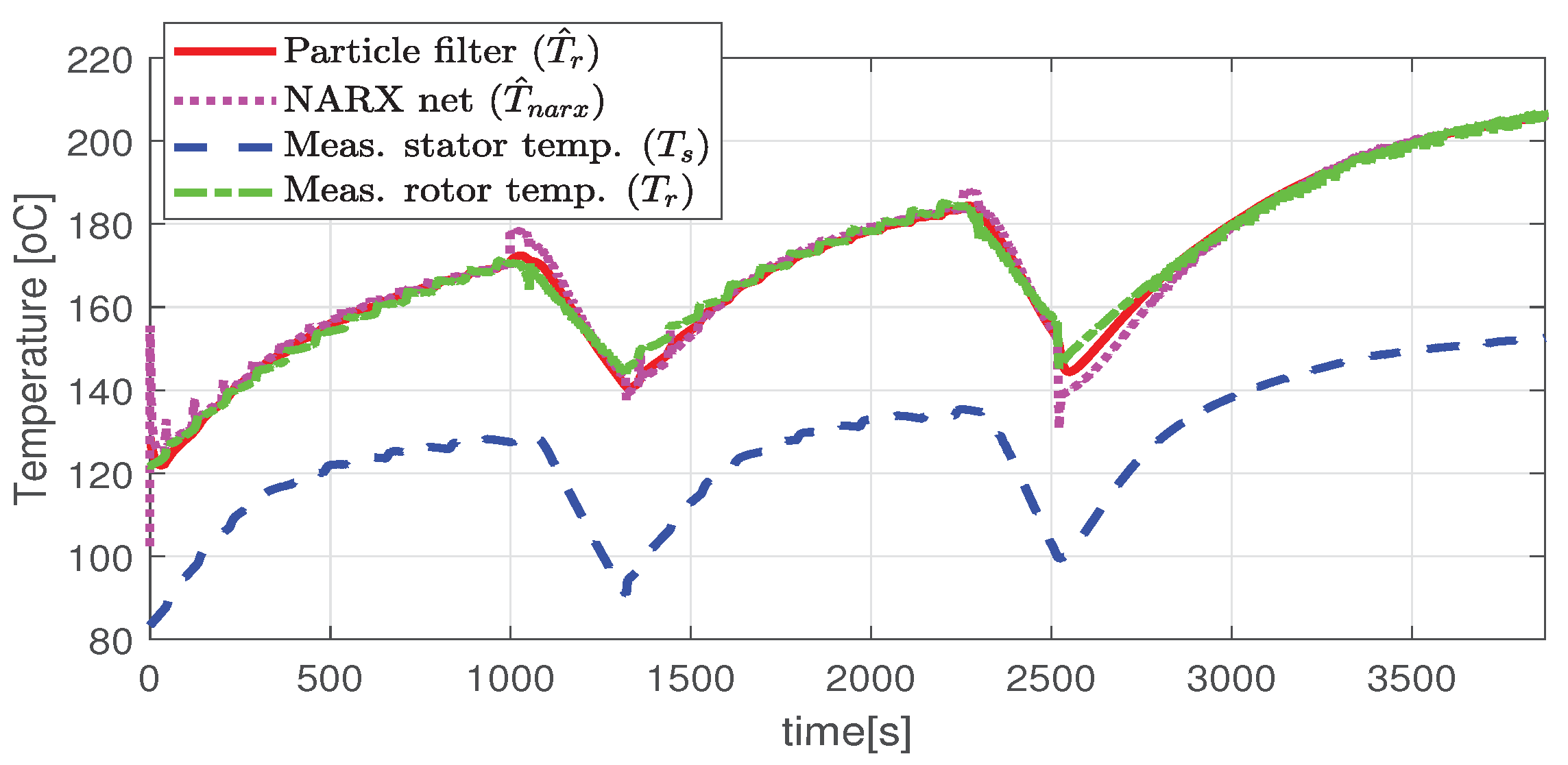
- In the common NARX network, the state is updated with the actual output of the network. In the proposed algorithm, we update the state of the NARX network with the posterior estimate. The posterior estimate is obtained after merging with the particle filter the two information channels: the NARX and the thermal model. This corrects the prediction of the neural network in the prediction stage. Thus, is obtained a conditioned output of the NARX model with the thermal model which in the end improves the precision of the estimated value. This approach is distinctive, and it was not investigated before to the problem of temperature estimation.
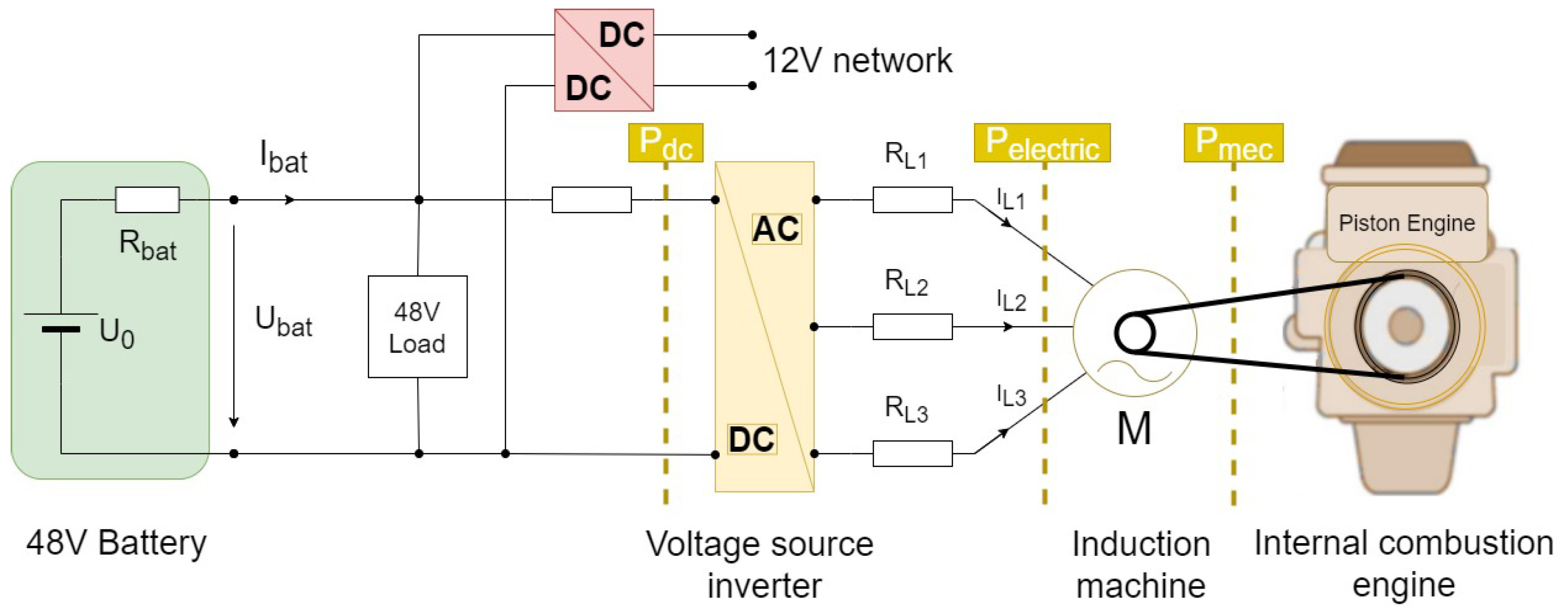
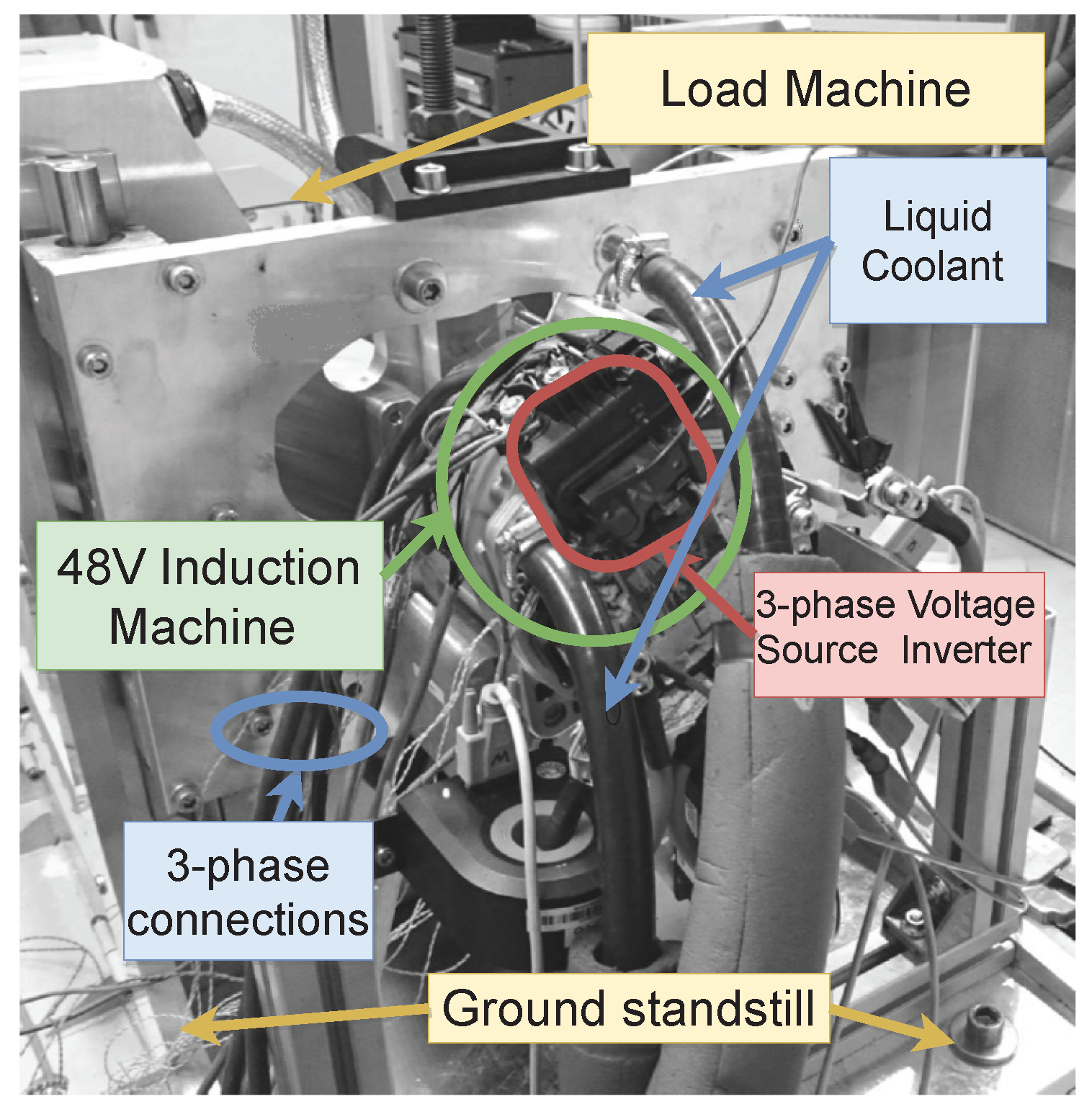
2. System Description—Belt-Driven Booster
3. The Mathematical Models of the State Transition and Observation Functions
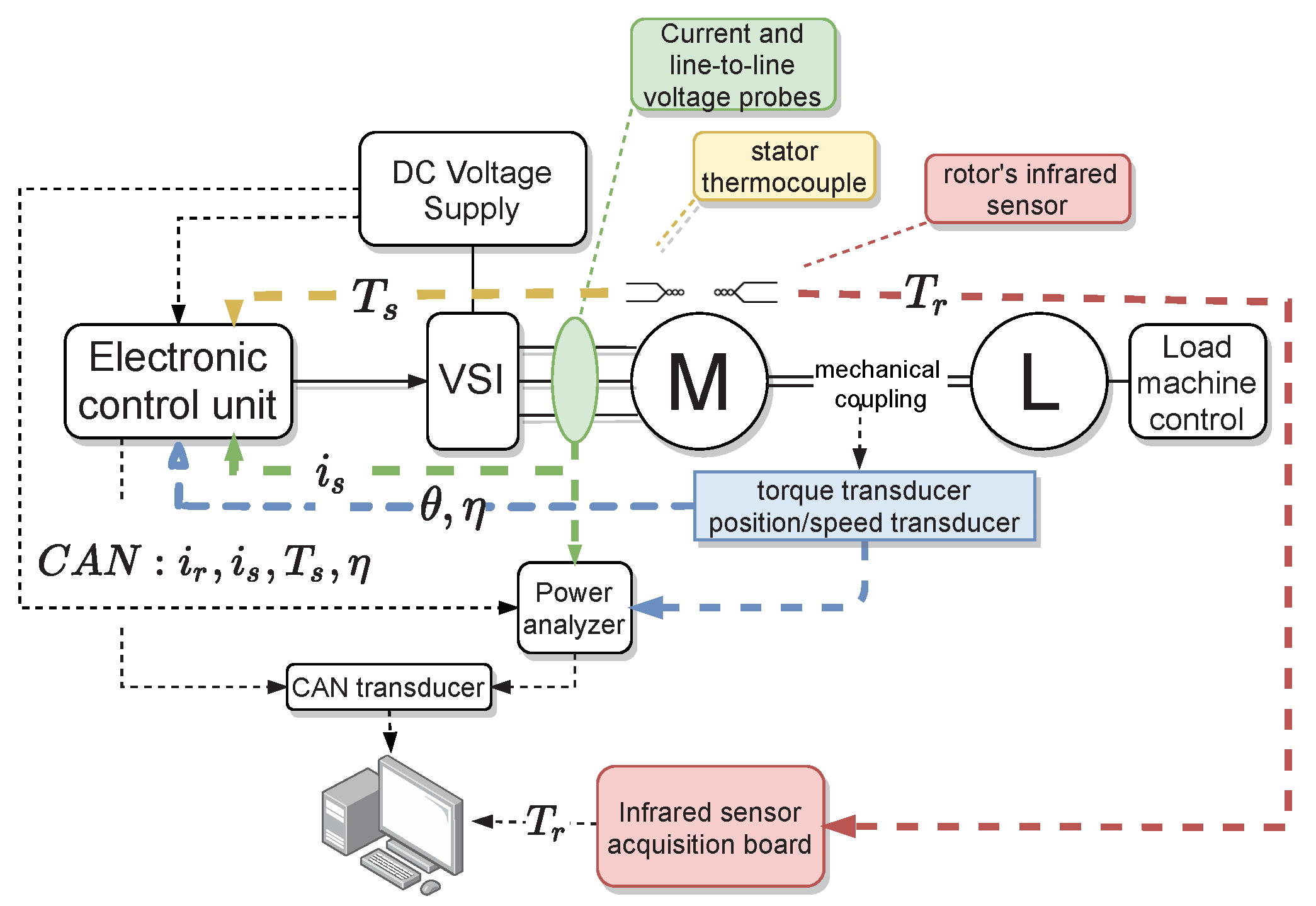
Data Acquisition and Network Training
4. Particle Filter for Rotor Temperature Estimation
| Algorithm 1 Particle filter for rotor temperature estimation |
| Initialization Initialize posterior distribution: Generate particles with initial distribution and place them in a set called . Run Compute while do Calculate the weight associated with each projected state: i = i + 1 end while Sample the discrete distribution w to generate random samples which will represent the posterior : ; fetch values from a uniform distribution ; for j = 1: do ; Cumulative Sum of W; end for for j = 1: do ; will be the index of the posterior after re-sampling end for for j = 1: do end for |
5. Results and Discussions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BDB | Belt-Driven Booster |
| CAN | Controller Area Network |
| ECU | Electronic Control Unit |
| HEV | Hybrid Electrical Vehicle |
| IM | Induction Machine |
| LM | Levenberg-Marquardt |
| Mild-HEVs | Mild-hybrid Electrical Vehicles |
| NARX | Nonlinear AutoRegressive network with eXogenous inputs |
| Probability Density Function | |
| PF | Particle Filter |
| PMSM | Permanent Magnet Synchronous Machine |
List of Symbols
| , | [V] voltage equilibrium of the stator in rotating frame; |
| , | [V] voltage equilibrium of the rotor in rotating frame; |
| [rad/s] mechanical angular velocity; | |
| [rad/s] electrical angular velocity; | |
| , | stator currents in rotating frame; |
| , | [A] rotor currents in rotating frame; |
| , | [Wb] stator fluxes in rotating frame; |
| , | [Wb] rotor fluxes in rotating frame; |
| [H] inductance of the stator; | |
| [H] inductance of the rotor; | |
| [H] mutual inductance; | |
| [H] leakage inductance of the stator; | |
| [H] leakage inductance of the rotor; | |
| [A] estimated value of the magnetization current; | |
| [A] stator current; | |
| [s] time constant of the rotor electrical dynamics; | |
| [Hz] inverter switching frequency; | |
| [] nominal rotor resistance; | |
| [] nominal stator resistance; | |
| normal distribution variances of observation and transition model; | |
| [s] time constant of the low-pass filter introduced for realizability; | |
| coefficients of the thermal model; | |
| [C] stator temperature; | |
| [C] rotor temperature; | |
| [C] predicted temperature with the thermal model; | |
| [C] predicted temperature with the NARX model; | |
| [C] posterior-estimated value of the rotor temperature; | |
| h | [s] sample time; |
| [RPM] mechanical speed of the rotor measured in revolutions per minute; | |
| gradient; | |
| ∗ | reference value; |
| w | [-] particle filter sample weights; |
| sigmoid activation function of the hidden layer; | |
| linear activation function of the output layer; |
References
- Sharma, V.K.; Usman, A.; Rajpurohit, B.S. Fault Diagnosis of BLDC Motor Drive using Vibration Spectrum Analysis: Part II. In Proceedings of the 2020 IEEE International Power and Renewable Energy Conference, Karunagappally, India, 30 Octomber–1 November 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Usman, A.; Rajpurohit, B.S. Time-Efficient Fault Diagnosis of a BLDC Motor Drive Deployed in Electric Vehicle Applications. In Proceedings of the 2020 IEEE Global Humanitarian Technology Conference (GHTC), Seattle, WA, USA, 29 Octomber–1 November 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Park, H.; Suh, Y. Fault-Tolerant Control Strategy for Reduced Torque Ripple of Independent Twelve-phase BLDC Motor Drive System under Open-Circuit Faults. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 3370–3375. [Google Scholar] [CrossRef]
- Emadi, A.; Lee, Y.J.; Rajashekara, K. Power electronics and motor drives in electric, hybrid electric, and plug-in hybrid electric vehicles. IEEE Trans. Ind. Electron. 2008, 55, 2237–2245. [Google Scholar] [CrossRef]
- Mocanu, R.; Onea, A. Determination of stator temperature for thermal protection in a Permanent Magnet Synchronous Machine. In Proceedings of the 2017 25th Mediterranean Conference on Control and Automation (MED), Valletta, Malta, 3–6 July 2017; pp. 1321–1325. [Google Scholar]
- Agbaje, O.; Kavanagh, D.; Sumisławska, M.; Howey, D.; McCulloch, M.; Burnham, K. TEstimation of Temperature Dependent Equivalent Circuit Parameters for Traction-Based Electric Machines. In Proceedings of the IET Hybrid and Electric Vehicles Conference 2013 (HEVC 2013), London, UK, 6–7 November 2013. [Google Scholar]
- Rahman, N.A.; Gu, L.; Bostanci, E.; Fahimi, B. Temperature estimation of switched reluctance machines using thermal impulse response technique. In Proceedings of the 2016 IEEE Conference on Electromagnetic Field Computation (CEFC), Miami, FL, USA, 13–16 November 2016; p. 1. [Google Scholar]
- Reigosa, D.D.; Fernandez, D.; Tanimoto, T.; Kato, T.; Briz, F. Permanent-magnet temperature distribution estimation in permanent-magnet synchronous machines using back electromotive force harmonics. IEEE Trans. Ind. Appl. 2016, 52, 3093–3103. [Google Scholar] [CrossRef] [Green Version]
- Romanazzi, P.; Bruna, M.; Howey, D.A. Thermal homogenization of electrical machine windings applying the multiple-scales method. J. Heat Transf. 2017, 139, 012101. [Google Scholar] [CrossRef] [Green Version]
- Qi, F.; Ralev, I.; Klein-Hessling, A.; De Doncker, R.W. Online temperature estimation of an automotive switched reluctance motor using space-resolved lumped parameter network. In Proceedings of the 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016; pp. 1–6. [Google Scholar]
- Baneira, F.; Asiminoaei, L.; Doval-Gandoy, J.; Delpino, H.A.M.; Yepes, A.G.; Godbersen, J. Estimation method of stator winding resistance for induction motor drives based on dc-signal injection suitable for low inertia. IEEE Trans. Power Electron. 2018, 34, 5646–5654. [Google Scholar] [CrossRef]
- Fahrner, W.; Vogelsberger, M.A.; Wolbank, T. A New Technique to Identify Induction Machine Rotor Parameters During Dynamic Operation and Low Speed. In Proceedings of the 2018 IEEE 18th International Power Electronics and Motion Control Conference (PEMC), Budapest, Hungary, 26–30 August 2018; pp. 471–476. [Google Scholar]
- Min, Y.; Huang, W.; Yang, J.; Zhao, Y. On-line Estimation of Permanent-magnet Flux and Temperature Rise in Stator Winding for PMSM. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–5. [Google Scholar]
- Tran, T.V.; Nègre, E. Efficient Estimator of Rotor Temperature Designing for Electric and Hybrid Powertrain Platform. Electronics 2020, 9, 1096. [Google Scholar] [CrossRef]
- Feng, G.; Lai, C.; Tjong, J.; Kar, N.C. Noninvasive Kalman filter based permanent magnet temperature estimation for permanent magnet synchronous machines. IEEE Trans. Power Electron. 2018, 33, 10673–10682. [Google Scholar] [CrossRef]
- Bijan, M.G.; Pillay, P. Efficiency estimation of the induction machine by particle swarm optimization using rapid test data with range constraints. IEEE Trans. Ind. Electron. 2018, 66, 5883–5894. [Google Scholar] [CrossRef]
- Zhao, H.; Eldeeb, H.H.; Wang, J.; Zhan, Y.; Xu, G.; Mohammed, O.A. Online Estimation of Rotor Temperature in Induction Motors Based on Parameter Identification. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 1629–1634. [Google Scholar]
- Tornello, L.D.; Scelba, G.; Scarcella, G.; Cacciato, M.; Testa, A.; Foti, S.; de Caro, S.; Pulvirenti, M. Combined Rotor-Position Estimation and Temperature Monitoring in Sensorless, Synchronous Reluctance Motor Drives. IEEE Trans. Ind. Appl. 2019, 55, 3851–3862. [Google Scholar] [CrossRef]
- Hunter, N.; Cox, T.; Zanchetta, P.; Odhano, S.A.; Rovere, L. Non-intrusive online stator temperature estimation for open-end winding PMSM. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 6845–6851. [Google Scholar]
- Carpiuc, S.C. Rotor temperature detection in permanent magnet synchronous machine-based automotive electric traction drives. IEEE Trans. Power Electron. 2016, 32, 2090–2097. [Google Scholar] [CrossRef]
- Schwartz, M.; Krebs, S.; Hohmann, S. Guaranteed State Estimation Using a Bundle of Interval Observers with Adaptive Gains Applied to the Induction Machine. Sensors 2021, 21, 2584. [Google Scholar] [CrossRef] [PubMed]
- Thrun, S. Particle filters in robotics. In Proceedings of the Eighteenth Conference on Uncertainty in Artificial Intelligence, Edmonton, AB, Canada, 1–4 August 2002; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 2002; pp. 511–518. [Google Scholar]
- Marconato, A.; Schoukens, M.; Schoukens, J. Filter-based regularisation for impulse response modelling. IET Control Theory Appl. 2016, 11, 194–204. [Google Scholar] [CrossRef] [Green Version]
- Sutarto, H.Y.; Boel, R.K.; Joelianto, E. Parameter estimation for stochastic hybrid model applied to urban traffic flow estimation. IET Control Theory Appl. 2015, 9, 1683–1691. [Google Scholar] [CrossRef] [Green Version]
- Li-ping, P.; Hongquan, Q. Particle Filtering approach to parameter estimate and temperature prediction of satellite. In Proceedings of the 2008 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; pp. 3001–3004. [Google Scholar]
- Haque, M.S.; Choi, S.; Baek, J. Auxiliary particle filtering-based estimation of remaining useful life of IGBT. IEEE Trans. Ind. Electron. 2017, 65, 2693–2703. [Google Scholar] [CrossRef]
- Lim, H.; Hwang, J.; Kwon, S.; Baek, H.; Uhm, J.; Lee, G. A Study on Real Time IGBT Junction Temperature Estimation Using the NTC and Calculation of Power Losses in the Automotive Inverter System. Sensors 2021, 21, 2454. [Google Scholar] [CrossRef] [PubMed]
- Diaconescu, E. The use of NARX neural networks to predict chaotic time series. Wseas Trans. Comput. Res. 2008, 3, 182–191. [Google Scholar]
- Hagan, M.T.; Menhaj, M.B. Training feedforward networks with the Marquardt algorithm. IEEE Trans. Neural Netw. 1994, 5, 989–993. [Google Scholar] [CrossRef] [PubMed]
- Hagan, M.; Demuth, H.; Beale, M.; De Jesus, O. Neural Network Design; PWS Pub. Co.: Boston, MA, USA, 1996. [Google Scholar]
- Mathworks. Implementation of Levenberg-Marquardt backpropagation—MATLAB. Levenberg-Marquardt Backpropagation—MATLAB. Available online: https://www.mathworks.com/help/deeplearning/ref/trainlm.html (accessed on 25 June 2021).
- Fox, V.; Hightower, J.; Liao, L.; Schulz, D.; Borriello, G. Bayesian filtering for location estimation. IEEE Pervasive Comput. 2003, 2, 24–33. [Google Scholar] [CrossRef] [Green Version]
- Ryan, A.; Hedrick, J.K. Particle filter based information-theoretic active sensing. Robot. Auton. Syst. 2010, 58, 574–584. [Google Scholar] [CrossRef]
- Thallas, A.; Tsardoulias, E.; Petrou, L. Particle filter—Scan matching hybrid SLAM employing topological information. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; pp. 226–231. [Google Scholar]
- L’Ecuyer, P. Uniform random number generation. Ann. Oper. Res. 1994, 53, 77–120. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| @ 20 °C | @ 20 °C | Pole Pairs | |||
|---|---|---|---|---|---|
| 0.0023 | 0.0024 | 4 | |||
| 200 | 6 | 48 | 60 | 18,000 | 4500 |
| Model Coefficient | Model Coefficient | Filter Time Constant |
| 14.8052 | 1.3332 | 0.01 |
| Sample Time | Measurement Noise | Number of Particles |
| [°C] | ||
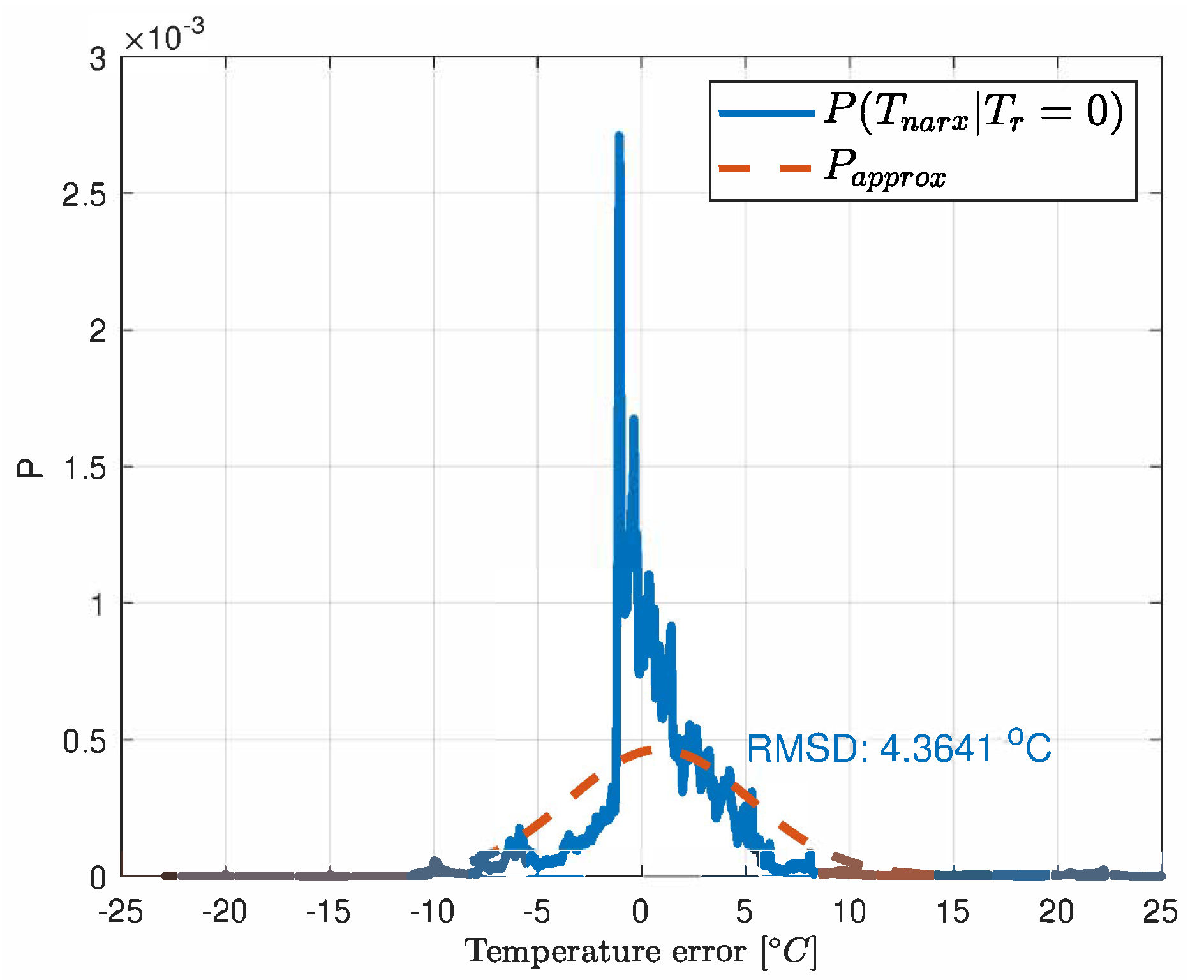
| 0.0015 | 4.3641 | 60 |
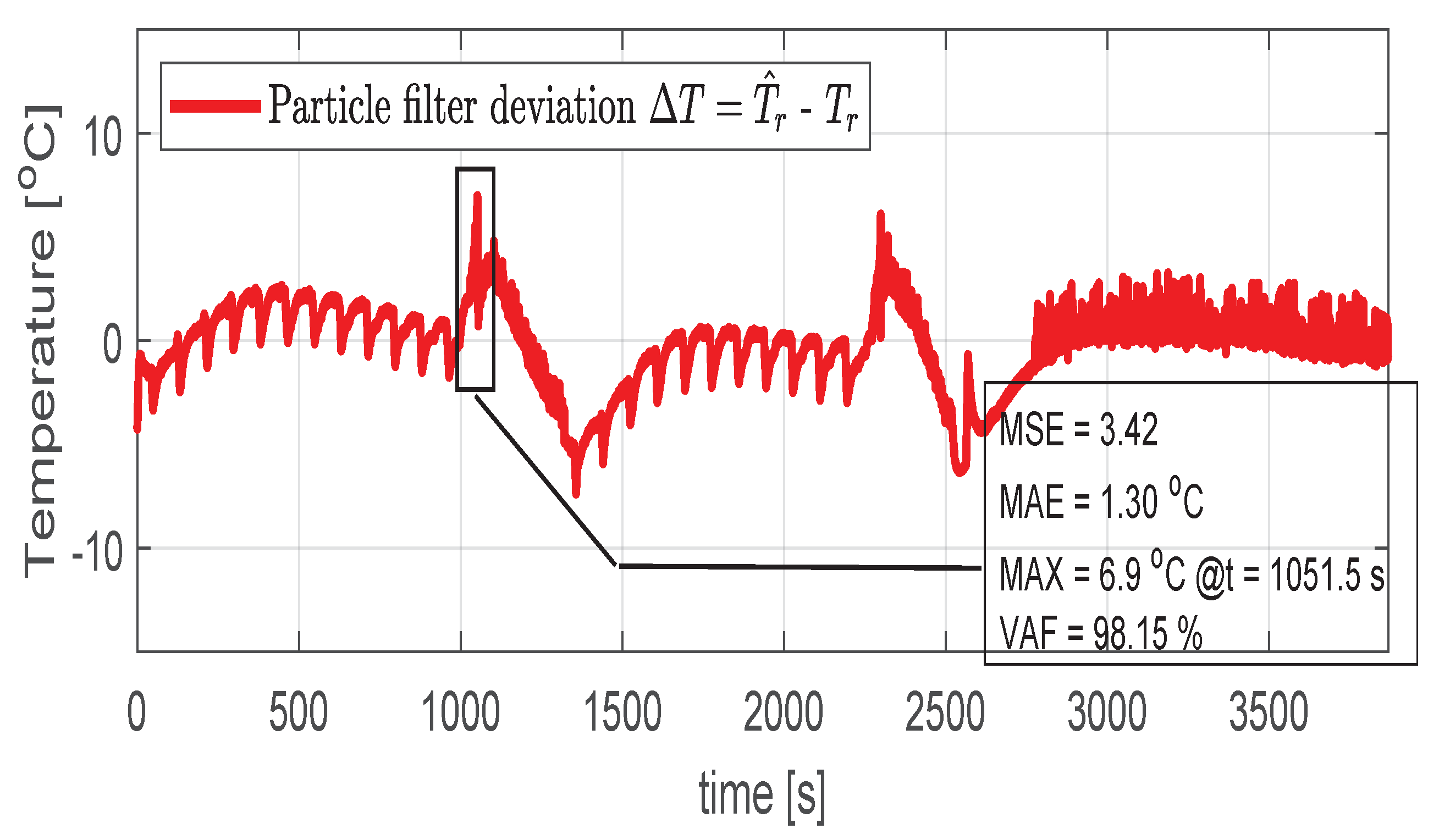
| Test Scenario | MSE | MAE | MAX | VAF |
|---|---|---|---|---|
| I | 3.42 | 1.30 °C | 6.90 °C | 98.15% |
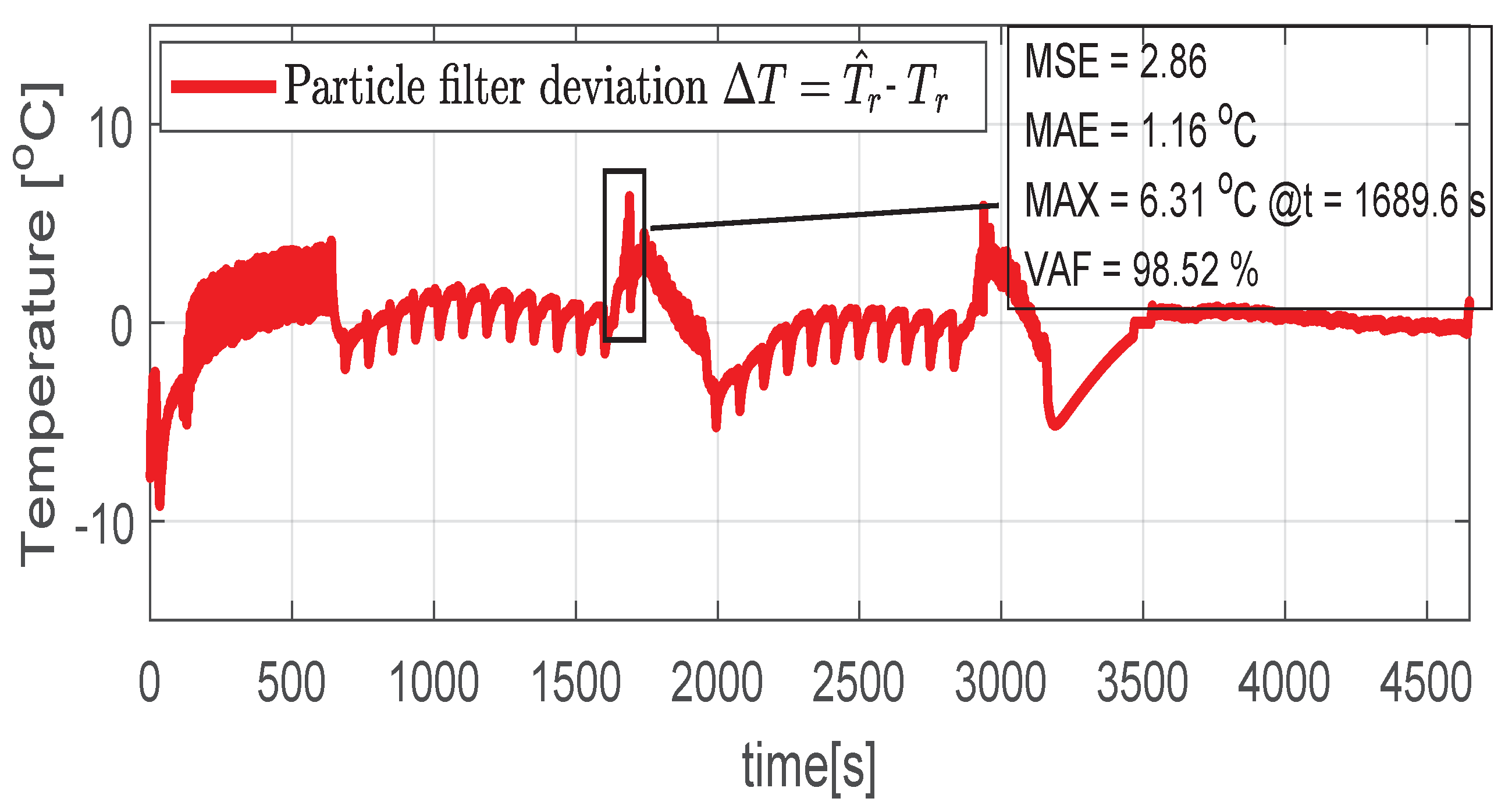
| II | 2.86 | 1.16 °C | 6.31 °C | 98.52% |
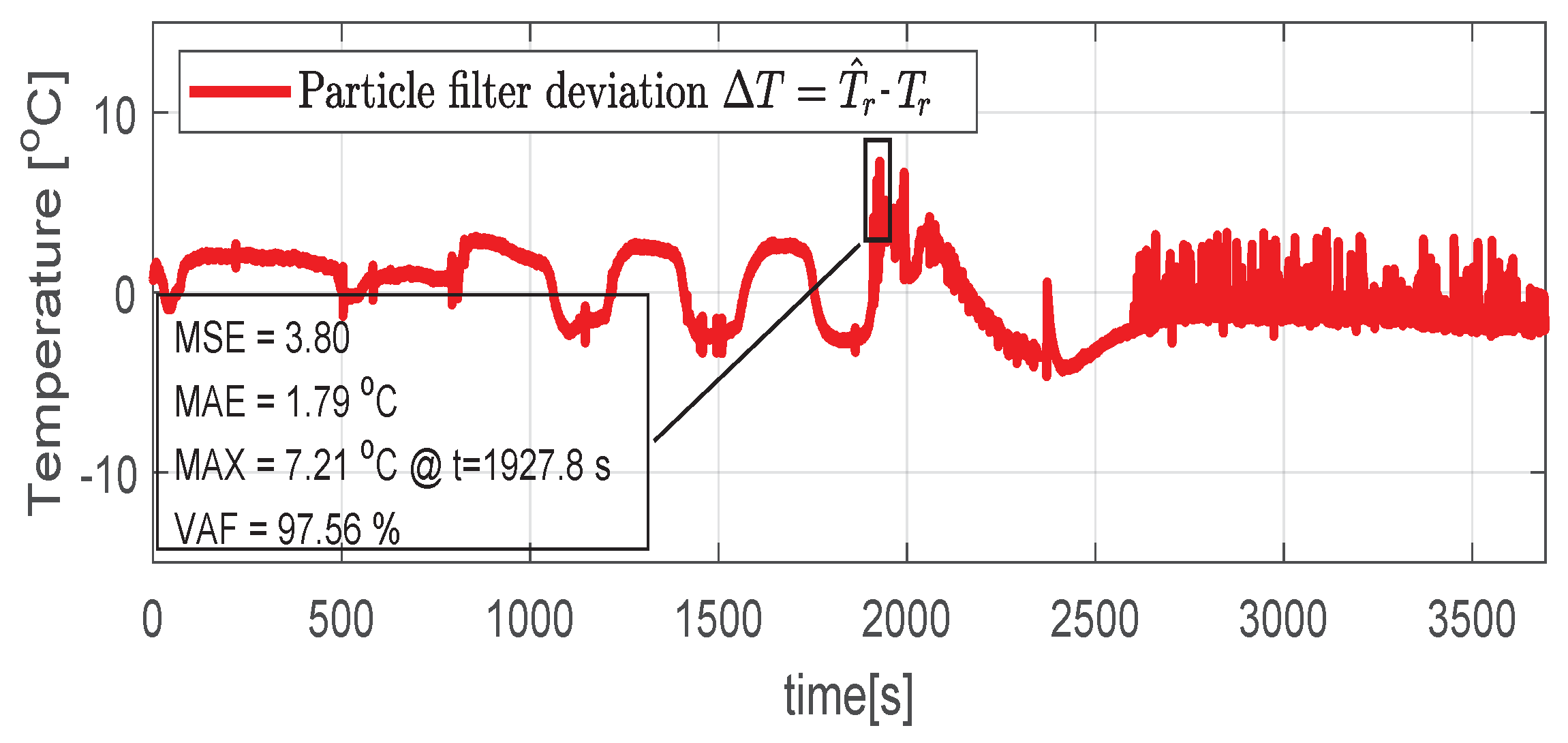
| III | 3.80 | 1.79 °C | 7.21 °C | 97.56% |
| 0.1403 | 1.2166 | 0.1194 | 0.9794 | 0.0861 | 1.1758 | ||||
| 2.0016 | 1.8543 | 0.0046 | |||||||
| 0.5346 | 0.1372 | 1.0812 | 0.7085 | 0.3366 | |||||
| 0.7925 | 0.6204 | 0.8561 | 2.0562 | 1.2913 | |||||
| 0.8833 | 0.0223 | 1.0860 | 1.4808 | 1.6212 | |||||
| 0.4766 | 0.5783 | 0.7903 | |||||||
| 2.0631 | 0.1600 | 1.7474 | 2.1912 | ||||||
| - | - | - | - | - | - | - | - | - | |
| - | - | - | - | - | - | - | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mocanu, R.; Onea, A.; Dosoftei, C.C. A Combined Model and Data-Driven Approach for the Determination of Rotor Temperature in an Induction Machine. Sensors 2021, 21, 4512. https://doi.org/10.3390/s21134512
Mocanu R, Onea A, Dosoftei CC. A Combined Model and Data-Driven Approach for the Determination of Rotor Temperature in an Induction Machine. Sensors. 2021; 21(13):4512. https://doi.org/10.3390/s21134512
Chicago/Turabian StyleMocanu, Razvan, Alexandru Onea, and Constantin Catalin Dosoftei. 2021. "A Combined Model and Data-Driven Approach for the Determination of Rotor Temperature in an Induction Machine" Sensors 21, no. 13: 4512. https://doi.org/10.3390/s21134512
APA StyleMocanu, R., Onea, A., & Dosoftei, C. C. (2021). A Combined Model and Data-Driven Approach for the Determination of Rotor Temperature in an Induction Machine. Sensors, 21(13), 4512. https://doi.org/10.3390/s21134512