5.4. Discussion
Prompt classification of pathogenic microorganisms is essential for effective disease treatment. To date, numerous complicated and time-consuming methods have been used in microbiological diagnostics [
25,
26]. Due to the complexity of metabolic processes, bacteria produce a series of volatile compounds (VCs) [
27,
28,
29,
30,
31]. Therefore, the use of an e-nose based on gas sensors appears to be a potential method that overcomes these drawbacks [
32,
33].
The amount and composition of volatile compounds depend on both the medium on which the bacteria develop [
34] and the species of the microorganism [
35,
36]. The detection of pathogenic bacteria and their identification with an e-nose can be successfully achieved in both the infected in organisms (in vivo) [
33] and in laboratories (in vitro) [
32].
Different types of sensors may be applied here. The performance of coated porphyrin and quartz sensors with a gas microbalance was analyzed by [
37], who found that these sensors can distinguish the VCs produced by 12 microorganisms in vitro, as well as being able to classify the bacteria as Gram-positive or negative. An electronic nose, Cyranose 320, based on thirty-two polymer carbon black composite sensors can detect six species of bacteria causing eye infections with 98% efficiency [
38].
Semiconductor gas sensors (MOS) have also been used in the detection and identification of bacteria [
33]; by examining the bacterial biofilm on dental plaque with a matrix of six sensors of the TGS series, these sensors were able to recognize teeth and mouth diseases [
32]. An e-nose based on a matrix of 28 semiconductor sensors was able to recognize pneumonia in people infected with
Pseudomonas aeruginosa with 92% efficiency.
Listeria monocytogenes and
Bacillus cereus bacteria incubated in Tryptic soy broth (TSB) were identified by a set of metal oxide sensors with 98% efficiency [
35].
Staphylococcus carnosus, Staphylococcus xylosus, Staphylococcus saprophyticus, Staphylococcus warneri, Staphylococcus epidermidis, Staphylococcus aureus, and
Micrococcus varians were classified by an e-nose with a six-sensor TGSXXX matrix with 90.5% efficiency. The satisfactory results in identifying microbes that were obtained by other researchers indicate the research direction related to MCA-8 device testing. As this e-nose is intended to be used for the diagnosis of bee diseases in the future, it should also be proven in the detection of
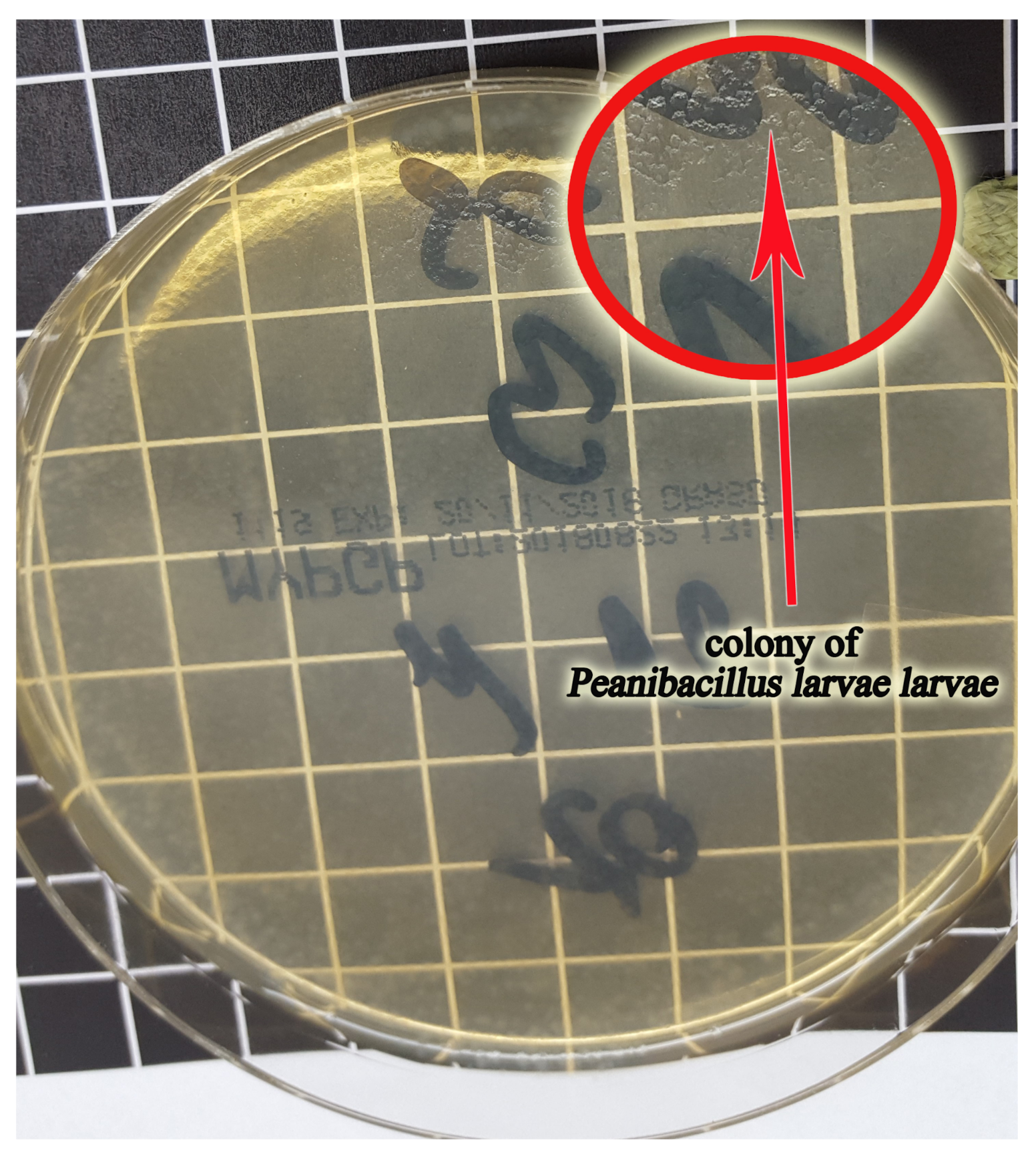
P. l. larvae bacteria that are more dangerous to bee brood. The most frequently isolated infected larvae ERIC I strain was selected for this research [
39].
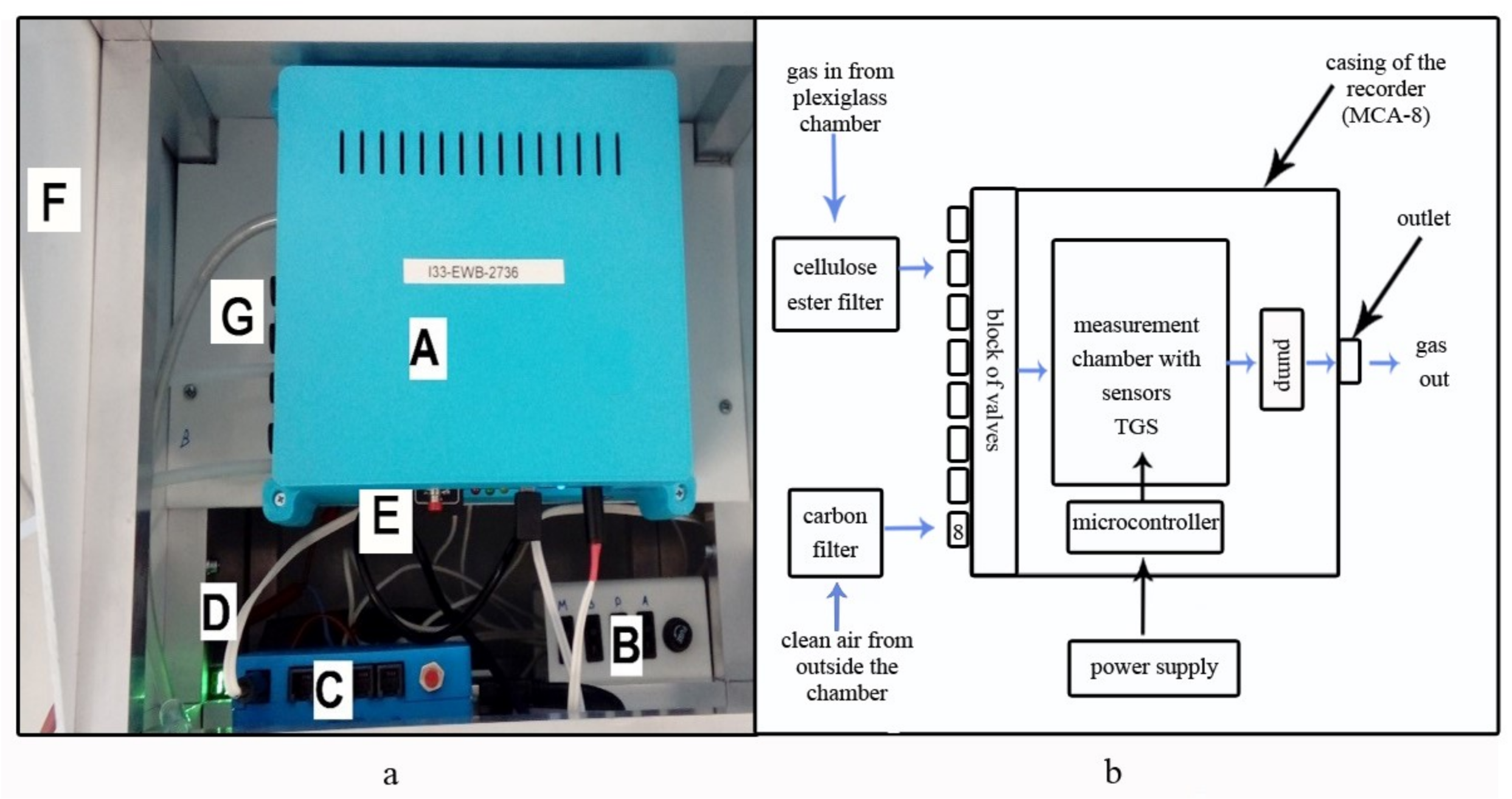
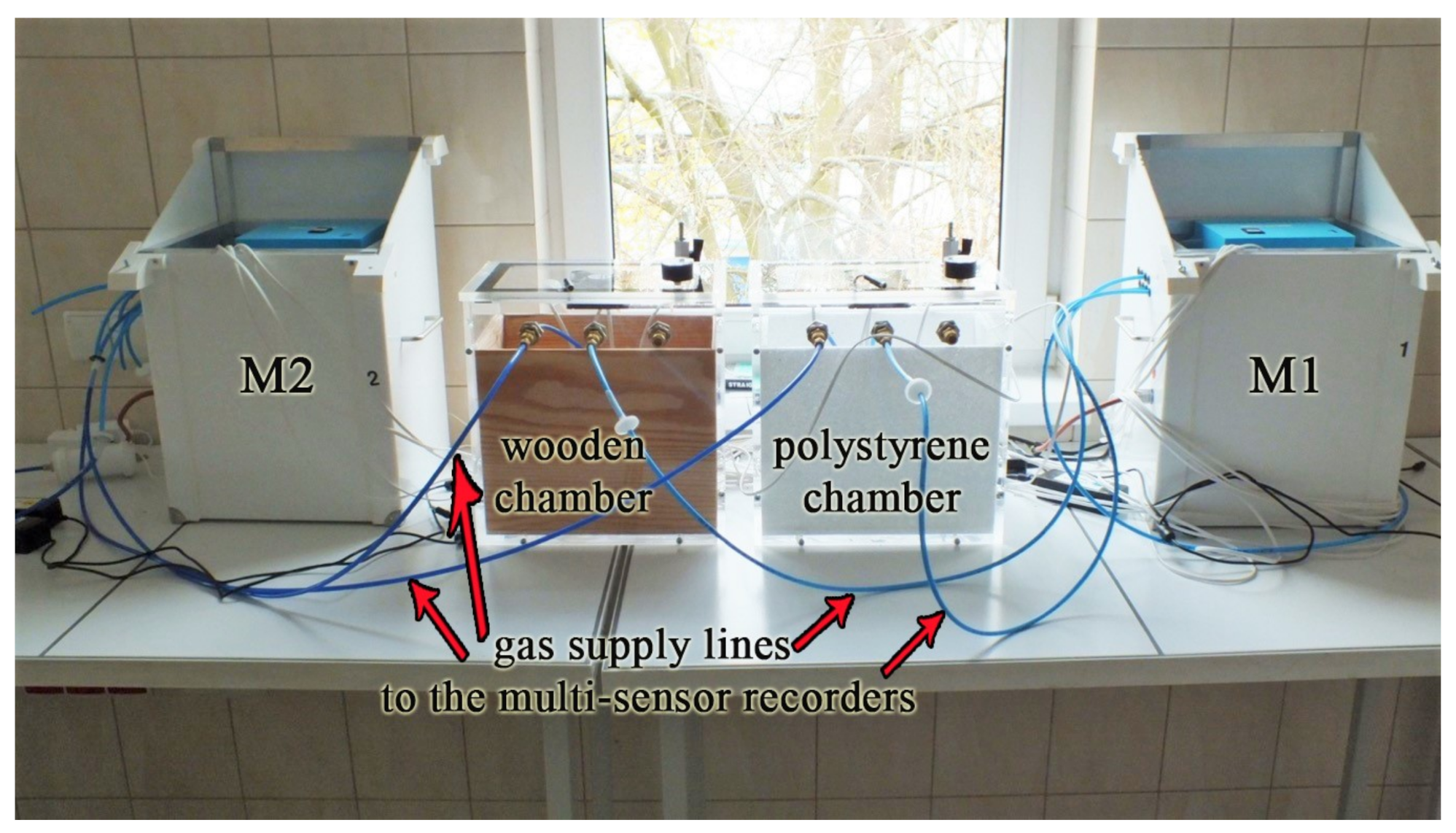
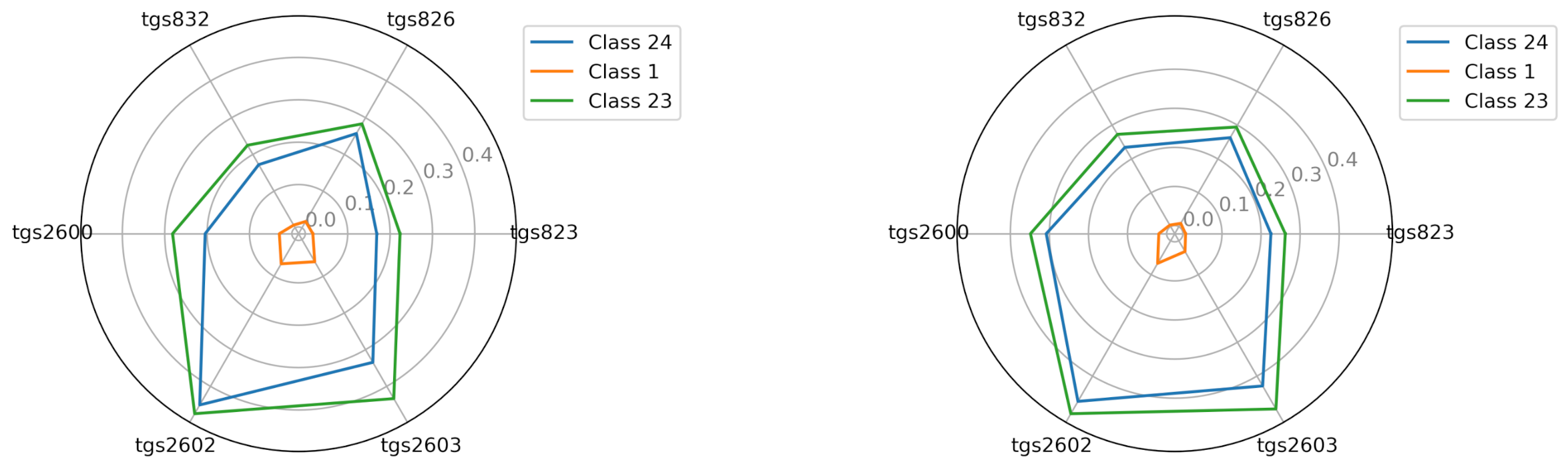
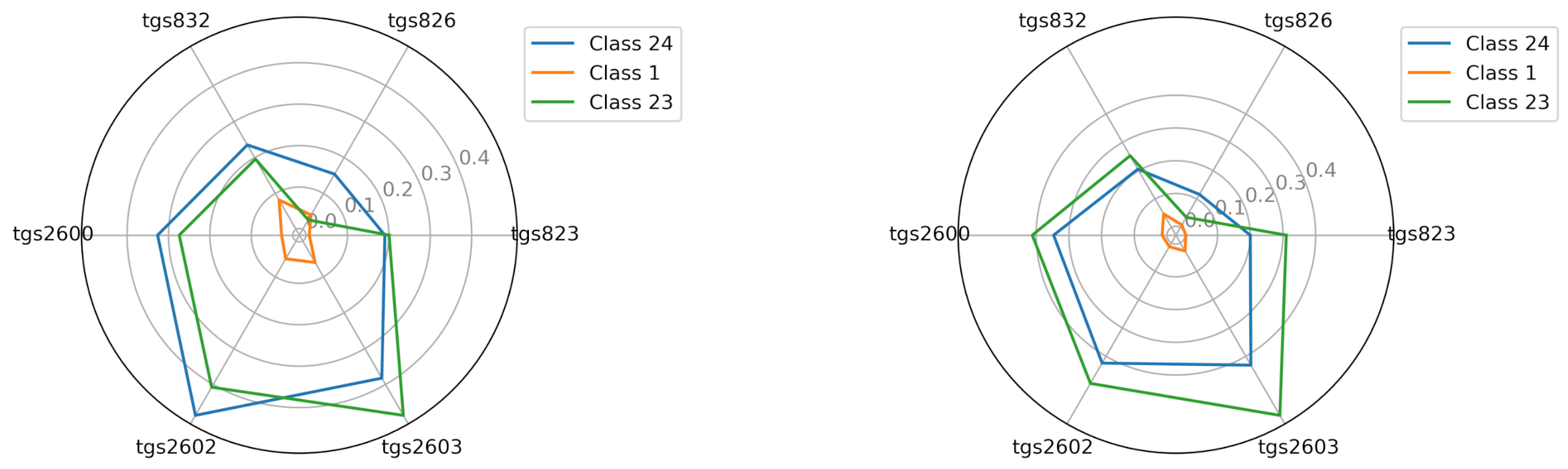
Many researchers, when verifying the effectiveness of e-noses in detecting bacteria, relied on one device only. In our experiment, gas from above the tested object was directed into two twin MCA-8 devices specified as M1 and M2 simultaneously. This enabled the comparison of their sensor matrix images as well as their effectiveness. Even though each MCA-8 device had a set of the same sensors, we could immediately observe that the images from each matrix appeared different. Visual comparison of mean readings for individual TGS sensors in individual classes using radial graphs showed that classes are distinguishable within the M1 and M2 devices, but they do not indicate a general rule applicable to both devices.
Thus, M1 produces a different image of the sensor matrix than M2 on the tested gas. These results of our experiment confirm there are no identical sensors with repeatable readings. This problem is called sensor drift [
40] and each device requires an individual approach to calibration, for example, by using an appropriate algorithm [
41].
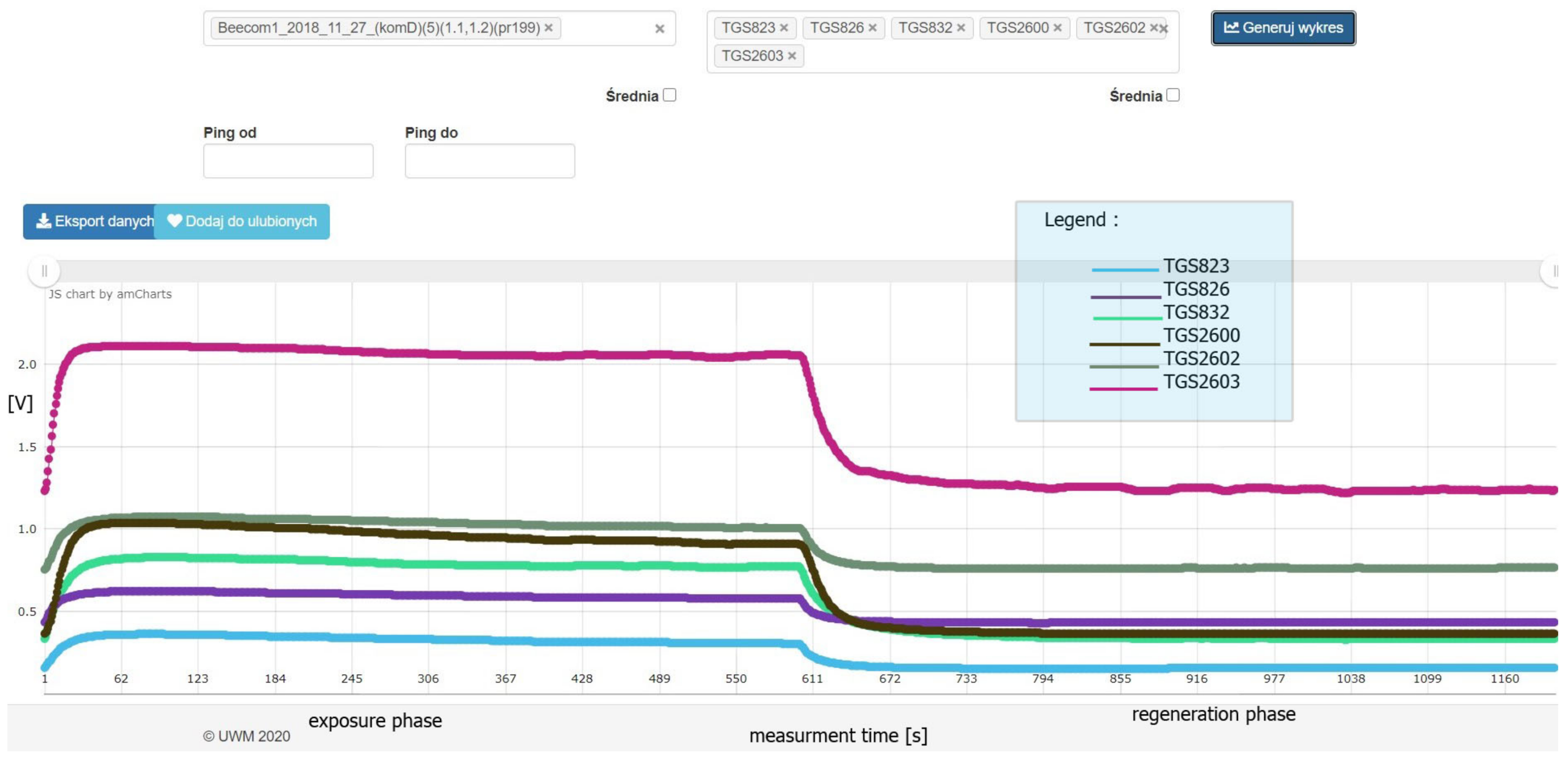
The images of the matrix of the sensor readings obtained for the wooden and polystyrene chambers were visually similar. The raw data used for the analyses were subjected to differential baseline correction. Baseline correction has been recommended by many researchers [
42,
43,
44,
45]. Improvement in classification efficiency is the aim of such a correction. It is especially justified under changing environmental conditions. In our case, the experiment was conducted under stable laboratory conditions. However, in the final analyses, applying a baseline correction improved the results.
The variant of the multi-class classification in the MCCV-5 model does not provide a clear answer as to which method can guarantee the most accurate classification of the tested objects. However, class 23 was the hardest to separate; in most cases, it was not possible at all. Classes 1 and 24 were easier to separate.
In the next step, the results of the 5 × MCCV-5 validation classification in the one vs. other (specific class vs. other classes) configuration were validated. The summary of the highest parameter values of class separability obtained by specific classifiers allowed us to select the canberra.811method as the best. However, it did not always produce satisfying results in our experiements. A very low tpr23, below 0.3 for the M1 device was observed.
In connection with the unfavorable separability of class 23, the results of 5 × MCCV-5 validation in the one vs. one configuration (class vs. other class) were also examined. First, the data of class 23 vs. class 24 were checked. We used 15 classifiers, and the manhattan.1nn classifier was found to be the most accurate. With this classifier, the M1 device in the wooden chamber could not detect the MYPGP media with culture but with no colonies (accuracy level 14%), and in the polystyrene chamber, the detection level was very low (42%) (
Table 9). In contrast, the M1 device was excellent at detecting
P. l. larvae colonies on the MYPGP media. In the wooden chamber, the effectiveness was 0.81%, and in the polystyrene chamber, 0.85%.
The M2 device in the configuration of classes (23 vs. 24) was more accurate because it was effective in detecting both the first and the second class. The detection over MYPGP media with no bacteria colonies in the wooden chamber was 66% effective, and in the polystyrene, it was 70% effective. The
P. l. larvae bacteria colonies in the both chambers were recognized by the M2 device with an efficiency of 88% (
Table 9).
Therefore, we identified the problem of the lack of class 23 separability in the polystyrene chamber with the M1 device; we then decided to compare data of this class vs. class 1 data. The 5 × MCCV-5 validation results in this class configuration resulted in perfect class 23 separability. Such effects were obtained by most of the classifiers. Based on the canberra.811 method, we found that the M1 device detected class-assigned objects with over 85% efficiency, and the M2 device, with an accuracy of 100% in almost every case (
Table 10).
To complete the analyses, a study was performed in the configuration of class 1 vs. class 24. With the use of superior classifiers, the 5 × MCCV-5 validation results were favorable. Using the example of the canberra.1nn method, we observed that the M1 device could recognize an empty wooden chamber with an accuracy of 81%, and a polystyrene one with an accuracy of 100%. The recognition of the
P. l. larvae bacterial colony through this device remained at the level of 91% in the wooden chamber and 100% in the polystyrene chamber (
Table 11).
The M2 device was even more effective in detecting an empty chamber. The result for the wooden chamber was 97% and 100% for polystyrene. Colonies of
P. l. larvae bacteria were recognized by the M2 device in the wooden chamber with 99% efficiency, and in a polystyrene chamber with 96% efficiency (
Table 11).
The experiment, therefore, showed that
P. l. larvae colonies on the MYPGP medium in laboratory conditions can be easily detected by our MCA-8 prototype of a multi-sensor recorder of sensor signals. We can expect average effectiveness of more than 97%. Comparing the results obtained in the in vitro detection of bacteria by other researchers [
35,
36], who tested e-noses based on the same sensors as MCA-8, the results of the experiment can be considered excellent. It is clear, that the laboratory results presented here are for a highly simplified laboratory model. Therefore, our team also tested three specimens of the MCA-8 device under live bee colony conditions. The results and conclusions from these tests will be presented in the next publication. The multi-sensor recorder used in our experiment in earlier studies perfectly detected bee broods strongly infected with the dangerous parasitic mite
Varroa destructor. This indicates that our e-nose has considerable potential to be applied in the detection of bacteria that are dangerous to bees and, therefore, the diseases caused by them.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}