
Performance of Two Different Flight Configurations for Drone-Borne Magnetic Data

 ,
,  and
and
Abstract
:1. Introduction
2. Measurements and Survey Design
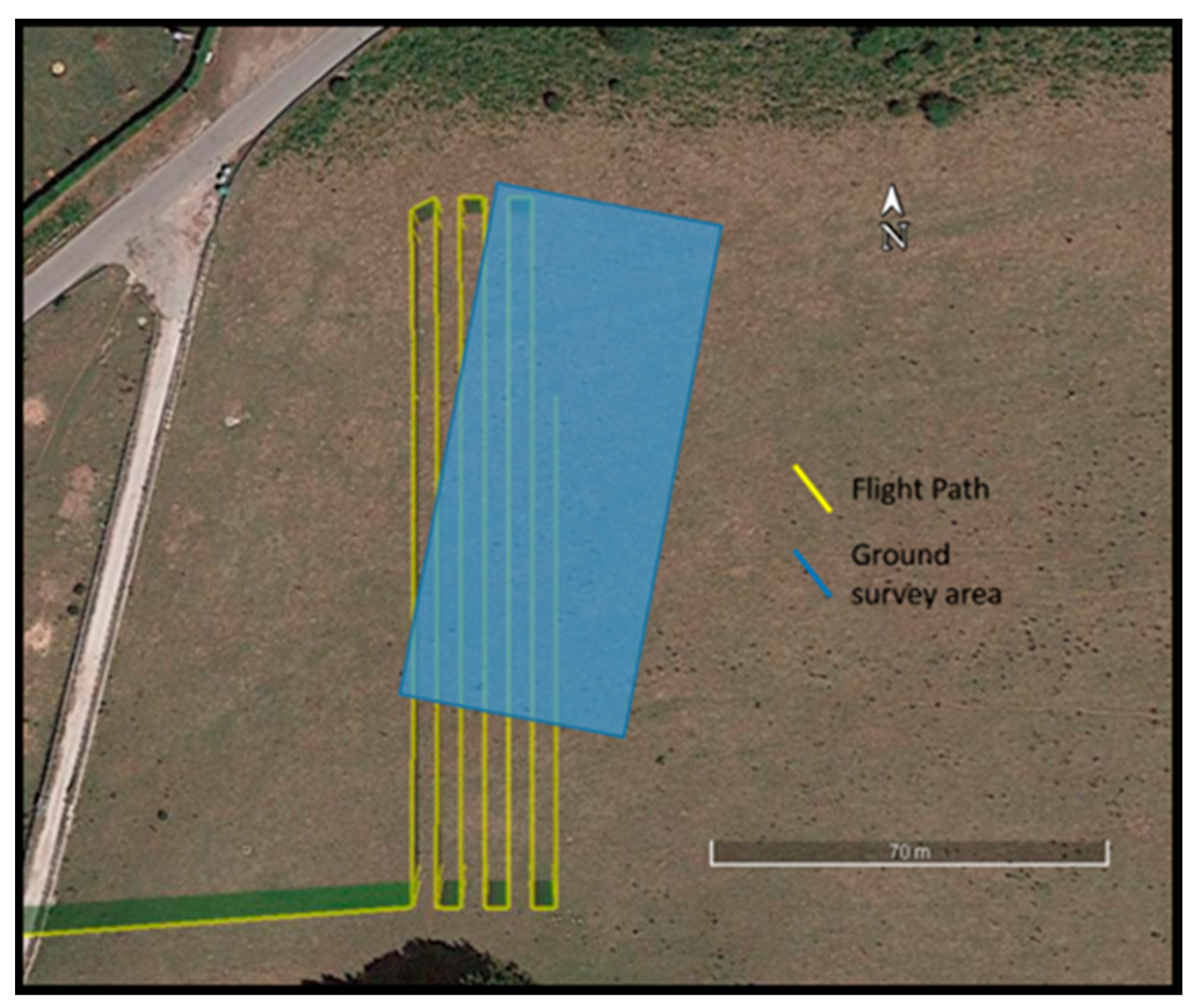
Drone-Borne and Ground Magnetic Surveys’ Design
3. Results
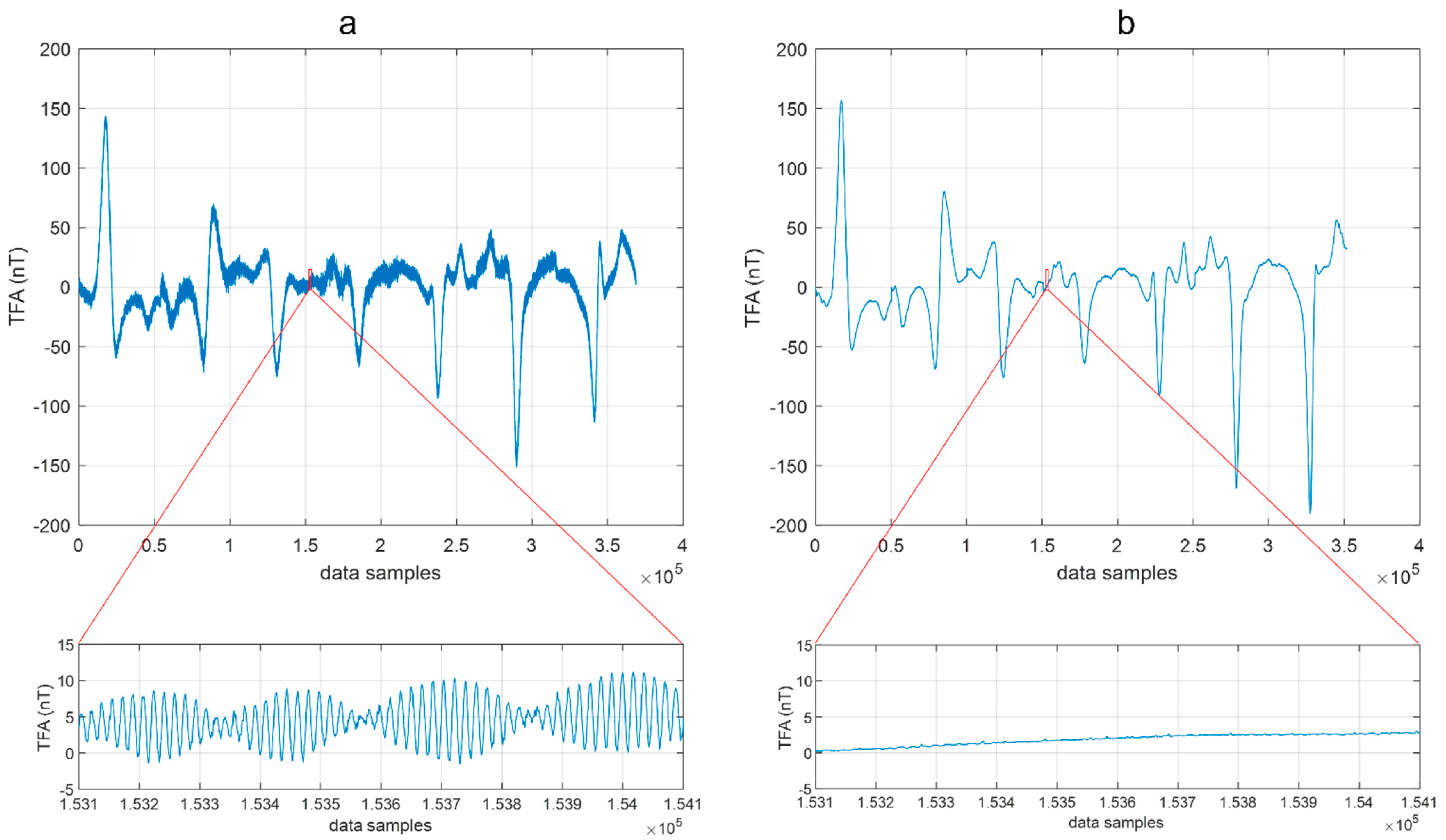
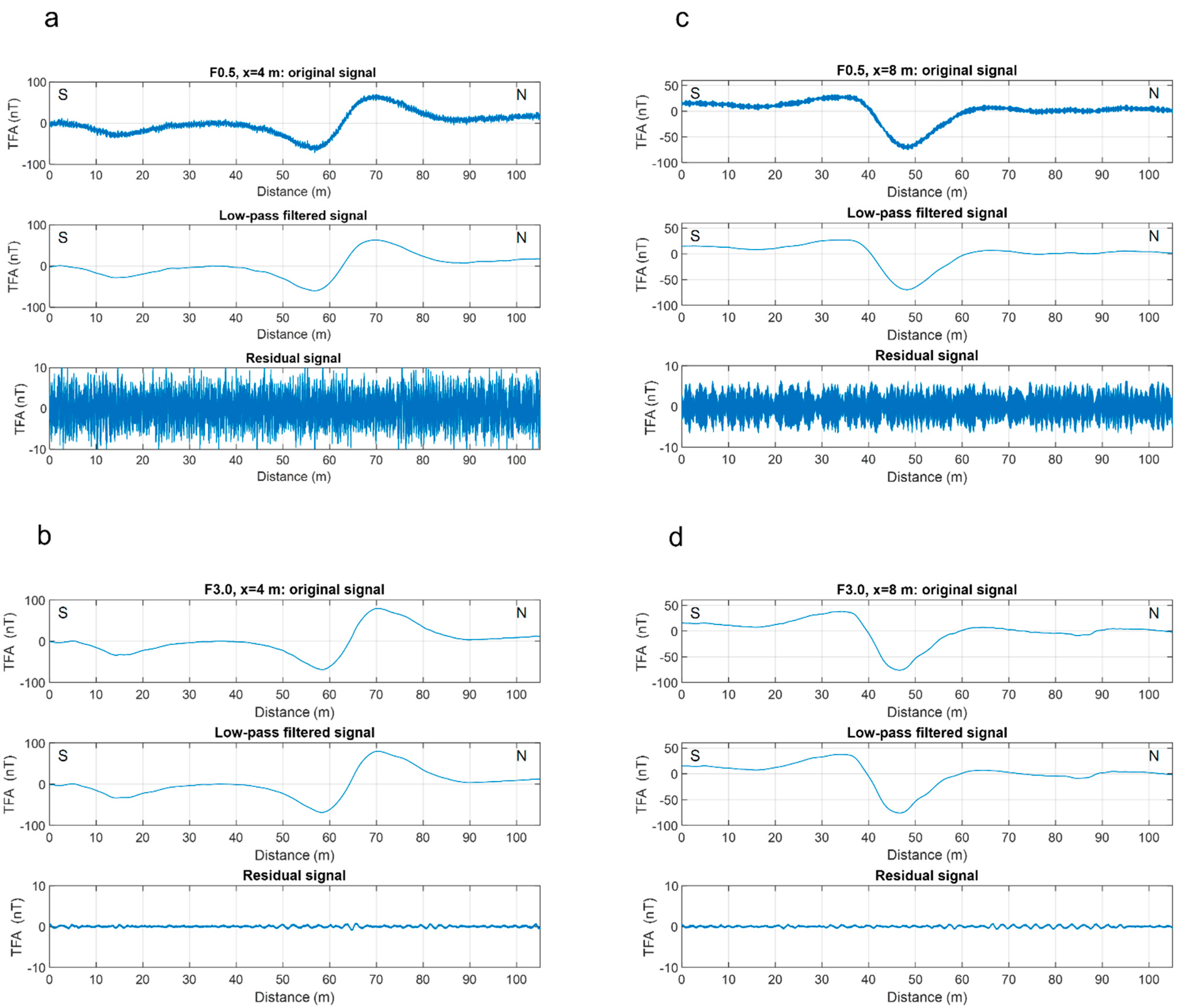
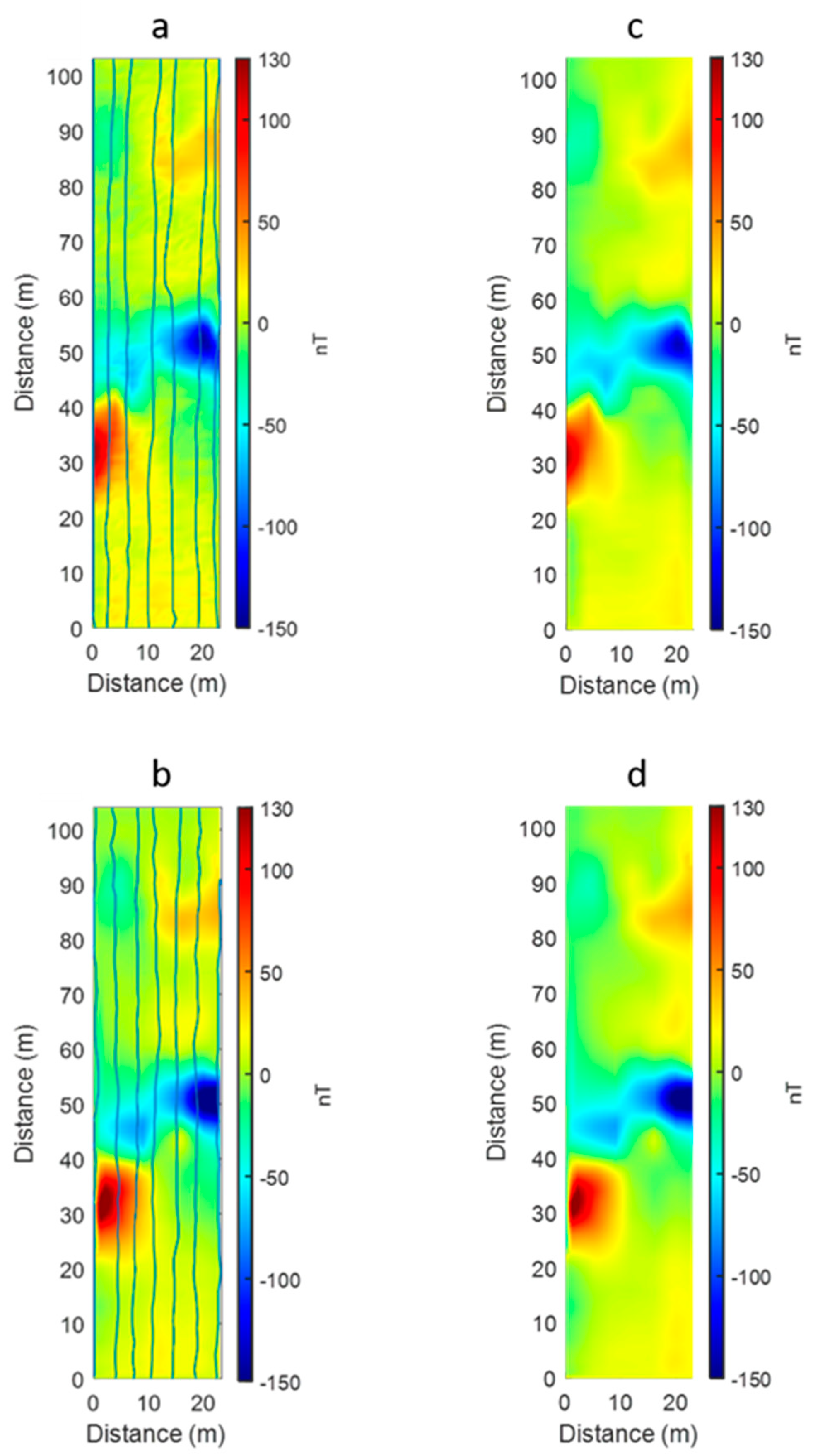
3.1. Drone-Borne Surveys
3.2. Ground Survey Magnetic Data
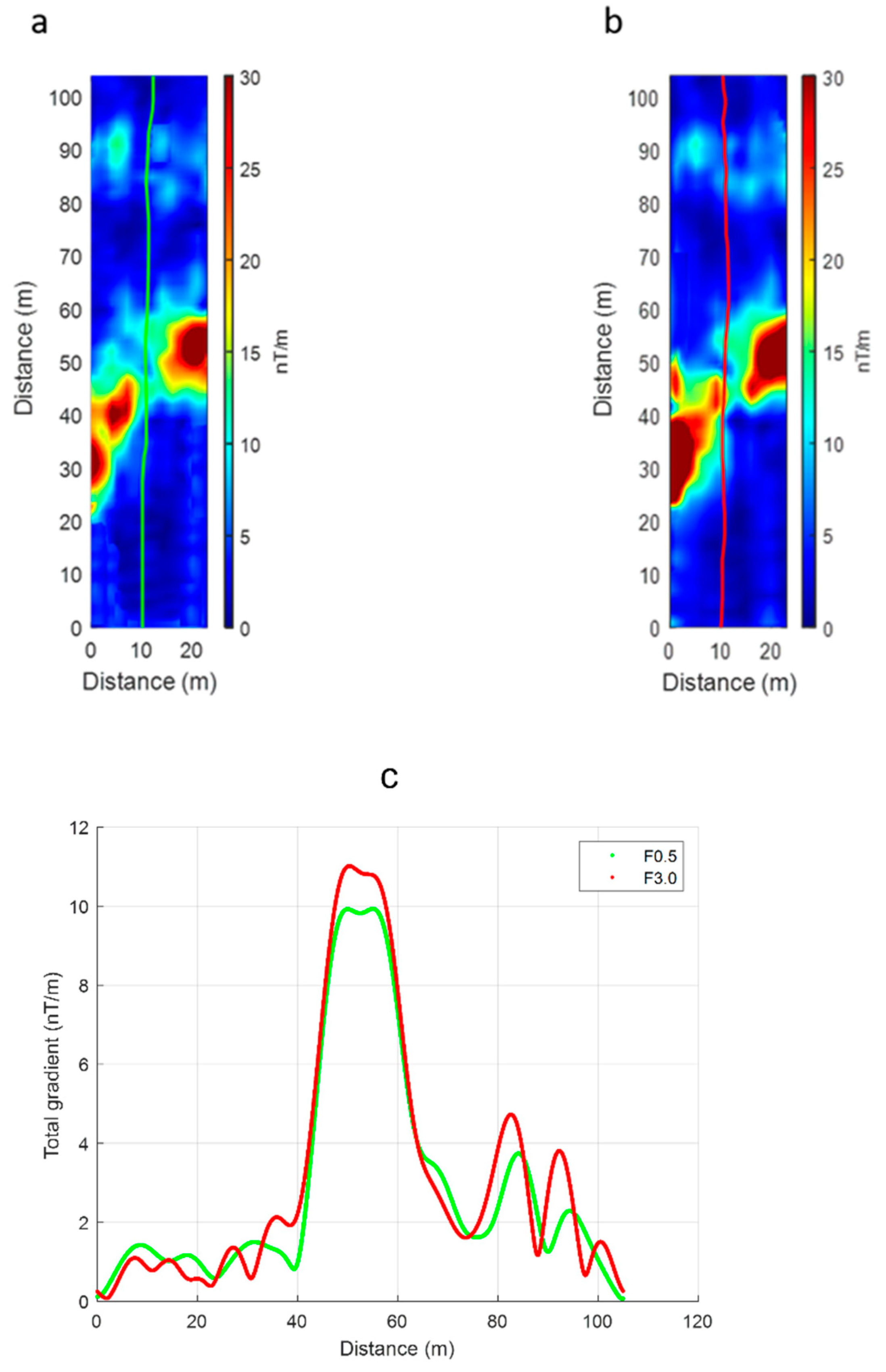
3.3. Source Depth Estimation
4. Discussion
5. Conclusions
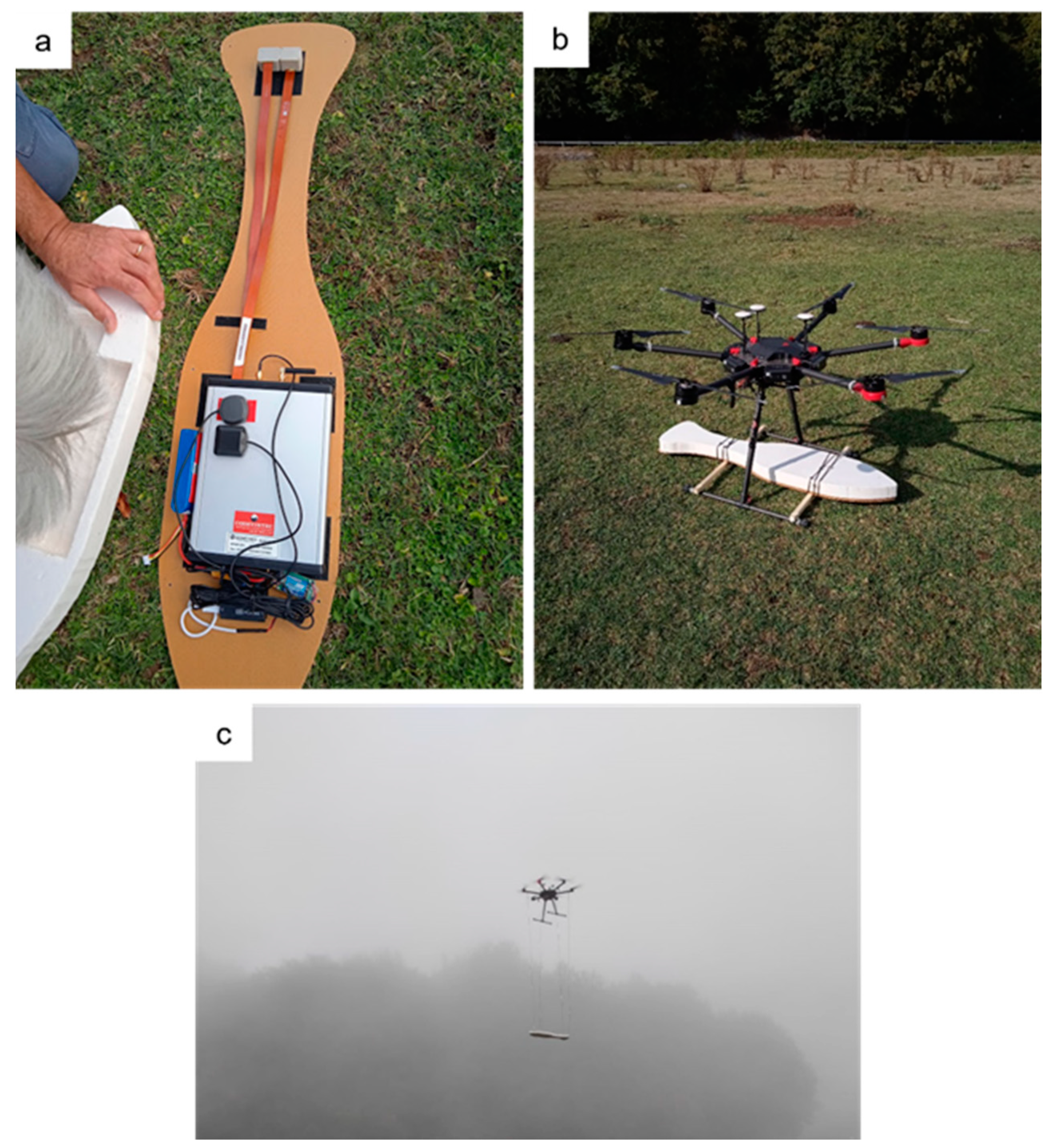
- the magnetometer could be placed even very near to the UAV in all the cases when it is necessary increasing flight security and stability (for example, in case of rugged terrain, in the presence of vegetation near the programmed flight altitude, or in case of non-optimal weather conditions);
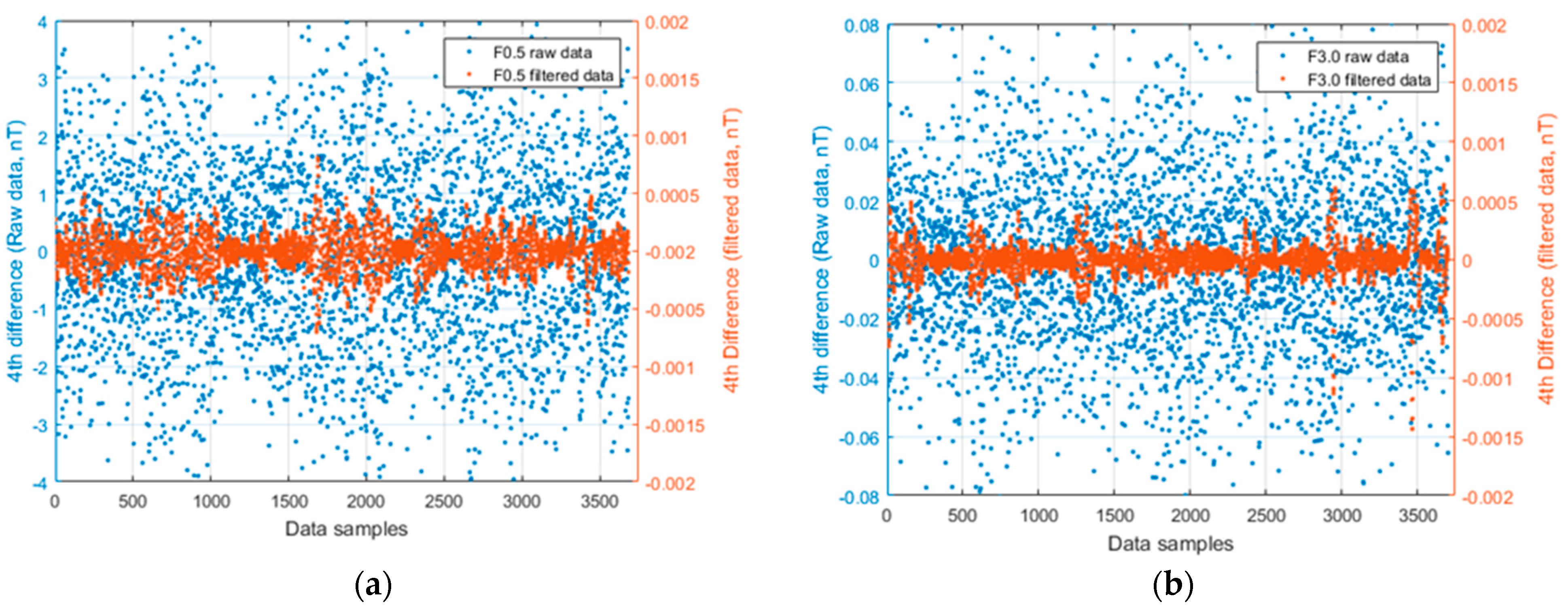
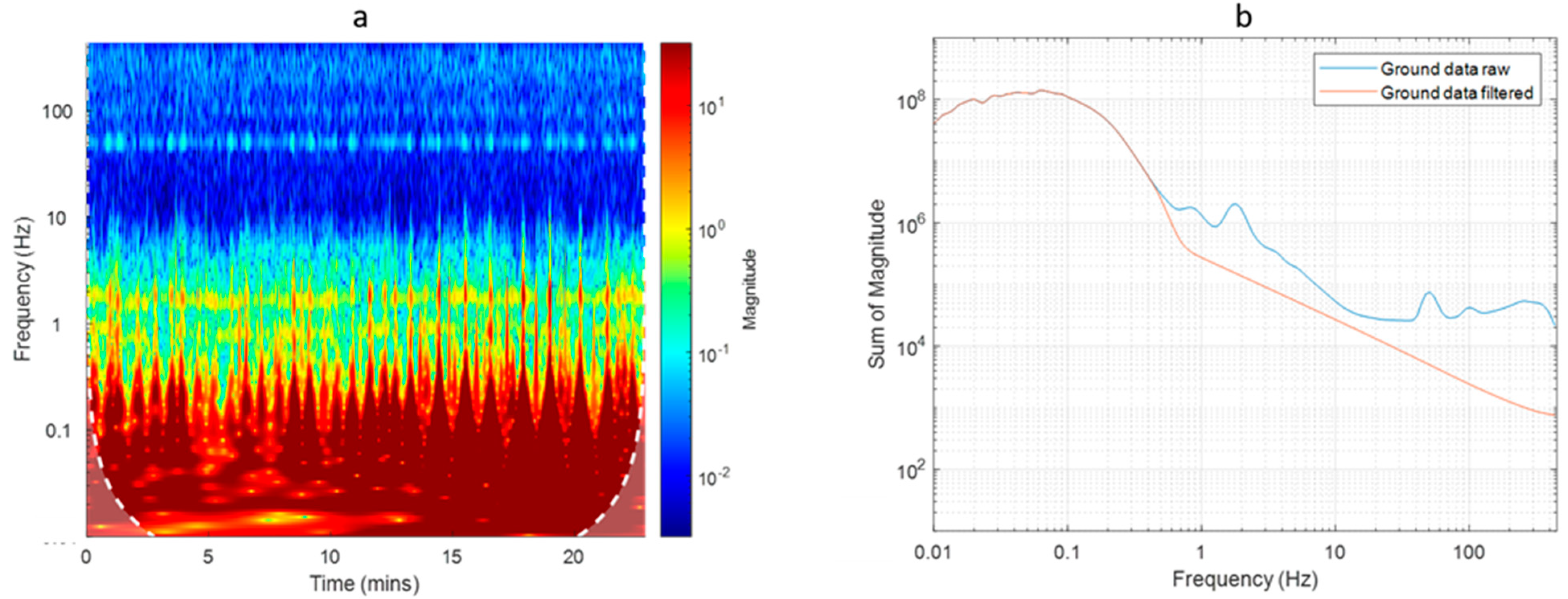
- in general, the flight speed should be sufficiently slow to favor a good spectral separation between noise and signal, and this is especially important if the UAV–magnetometer distance is small;
- if positioned very near to the drone, a good practice should be to program the flight without performing the 180° turn at the end of each line, thereby avoiding strong heading errors—this procedure is simply implemented using flight programming software;
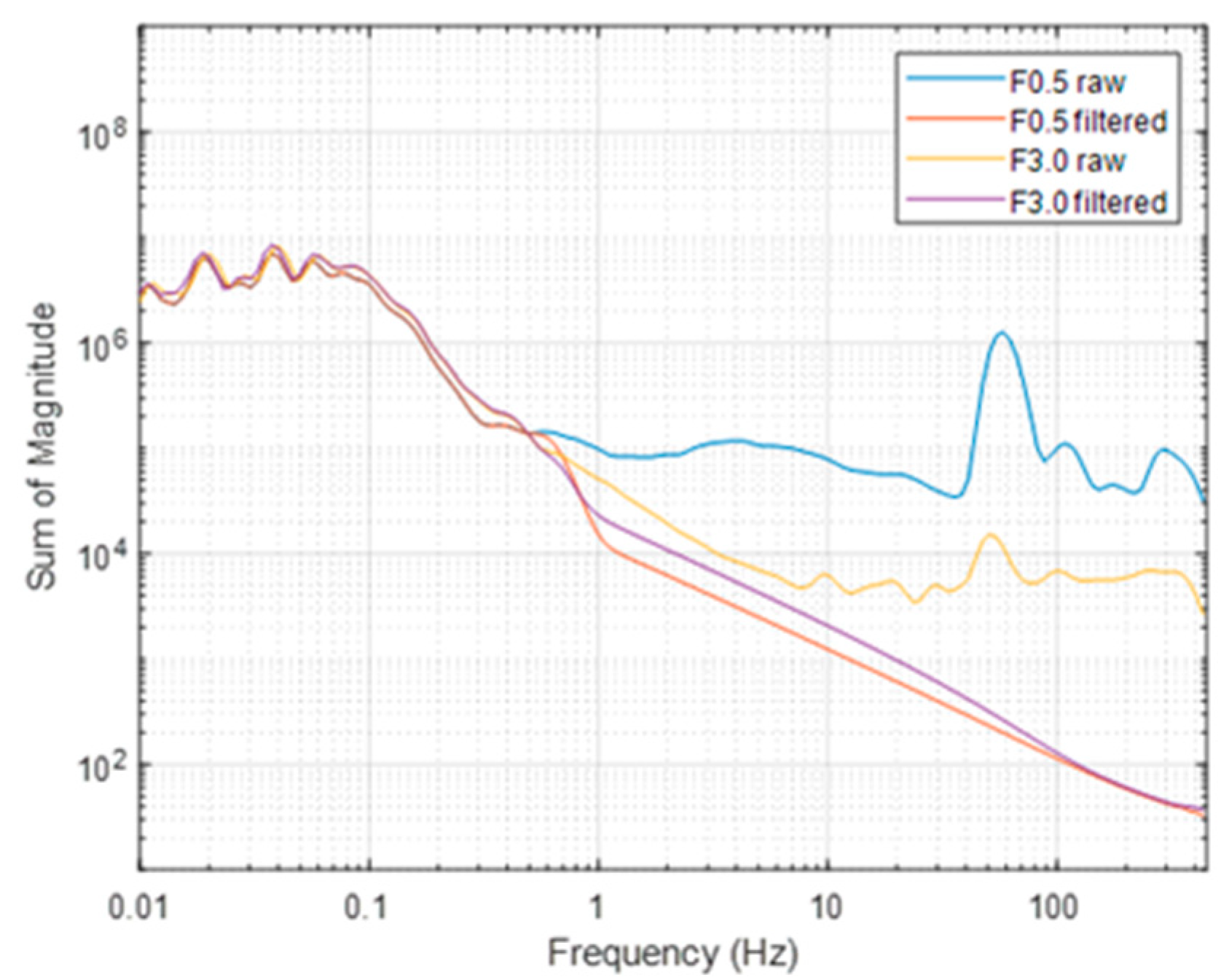
- the use of a magnetometer operating at a fast acquisition rate (in our case, 1000 Hz) is strongly advised to adequately sample the high frequencies (50 Hz or more) typically associated to UAV electromagnetic noise. This noise, if in aliasing, can contaminate the frequency band associated to the useful signal.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Samson, C.; Straznicky, P.; Laliberté, J.; Caron, R.M.; Ferguson, S.; Archer, R. Designing and building an unmanned aircraft system for aeromagnetic surveying. In SEG Expanded Abstracts, Proceedings of the Society of Exploration Geophysicists 80th Annual International Meeting, Denver, CO, USA, 17–22 October 2010; SEG: Tulsa, OK, USA, 2010; Volume 29, pp. 1167–1171. [Google Scholar] [CrossRef] [Green Version]
- Stoll, J.; Móritz, D. Unmanned aircraft systems for rapid near surface geophysical measurements. In International Archive of Photogrammetry, Remote Sensing and Spatial Information Science, Proceedings of the 75th EAGE Conference and Exhibition—Workshops, London UK, 10–13 June 2013; EAGE: Houten, The Netherlands, 2013; Volume 1, pp. 391–394. [Google Scholar] [CrossRef] [Green Version]
- Cunningham, M.; Samson, C.; Wood, A.; Cook, I.; Doyle, B. Detecting mineral ore bodies with UASs instrumented with magnetometers. In Proceedings of the Unmanned Systems Canada Conference, Halifax, NS, Canada, 2–5 November 2015. [Google Scholar]
- Parvar, K. Development and Evaluation of Unmanned Aerial Vehicle (UAV) Magnetometry Systems. Master’s Thesis, Queen’s University, Kingston, ON, Canada, 2016; pp. 1–141. [Google Scholar]
- Wood, A.; Cook, I.; Doyle, B.; Cunningham, M.; Samson, C. Experimental aeromagnetic survey using an unmanned air system. Lead. Edge 2016, 35, 270–273. [Google Scholar] [CrossRef]
- Cunningham, M. Aeromagnetic Surveying with Unmanned Aircraft Systems. Master’s Thesis, Carleton University, Ottawa, ON, Canada, 2018. [Google Scholar] [CrossRef] [Green Version]
- Malehmir, A.; Dynesius, L.; Paulusson, K.; Paulusson, A.; Johansson, H.; Bastani, M.; Wedmark, M.; Marsden, P. The potential of rotary-wing UAV-based magnetic surveys for mineral exploration: A case study from central Sweden. Lead. Edge 2017, 36, 552–557. [Google Scholar] [CrossRef]
- Parvar, K.; Braun, A.; Layton-Matthews, D.; Burns, M. UAV magnetometry for chromite exploration in the Samail ophiolite sequence, Oman. J. Unmanned Veh. Syst. 2018, 6, 57–69. [Google Scholar] [CrossRef] [Green Version]
- Walter, C.A.; Braun, A.; Fotopoulos, G. Impact of 3-D attitude variations of a UAV magnetometry system on magnetic data quality. Geophys. Prospect. 2019, 67, 465–479. [Google Scholar] [CrossRef]
- Walter, C.; Braun, A.; Fotopoulos, G. Spectral Analysis of Magnetometer Swing in High-Resolution UAV-borne Aeromagnetic Surveys. In Proceedings of the 2019 IEEE Systems and Technologies for Remote Sensing Applications Through Unmanned Aerial Systems (STRATUS), Rochester, NY, USA, 25–27 February 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Walter, C.; Braun, A.; Fotopoulos, G. High-resolution unmanned aerial vehicle aeromagnetic surveys for mineral exploration targets. Geophys. Prospect. 2020, 68, 334–349. [Google Scholar] [CrossRef]
- Noriega, G.; Marszalkowski, A. Adaptive techniques and other recent developments in aeromagnetic compensation. First Break. 2017, 35, 31–38. [Google Scholar] [CrossRef]
- Tuck, L.; Samson, C.; Polowick, C.; Laliberté, J. Real-time compensation of magnetic data acquired by a single-rotor unmanned aircraft system. Geophys. Prospect. 2019, 67, 1637–1651. [Google Scholar] [CrossRef]
- Mu, Y.; Zhang, X.; Xie, W.; Zheng, Y. Automatic detection of near-surface targets for unmanned aerial vehicle (UAV) magnetic Survey. Remote. Sens. 2020, 12, 452. [Google Scholar] [CrossRef] [Green Version]
- Walter, C.; Braun, A.; Fotopoulos, G. Characterizing electromagnetic interference signals for unmanned aerial vehicle geo-physical surveys. Geophysics 2021, in press. [Google Scholar]
- Paoletti, V.; Fedi, M.; Florio, G.; Rapolla, A. Localized Cultural Denoising of High-Resolution Aeromagnetic Data. Geophys. Prospect. 2007, 55, 421–432. [Google Scholar] [CrossRef]
- Hood, P.J.; Teskey, D.J. Aeromagnetic gradiometer program of the Geological Survey of Canada. Geophysics 1989, 54, 1012–1022. [Google Scholar] [CrossRef]
- Teskey, D.J.; Barlow, R.; Hood, P.J.; Lefebvre, D.; Paterson, N.; Reford, M.; Watson, D. Guide to aeromagnetic specifications and contracts. Geol. Surv. Can. 1991, 2349. [Google Scholar] [CrossRef]
- Coyle, M.; Dumont, R.; Keating, P.; Kiss, F.; Miles, W. Geological Survey of Canada aeromagnetic surveys: Design, quality assurance, and data dissemination. Geol. Surv. Can. 2014, 7660. [Google Scholar] [CrossRef]
- Sowerbutts, W.T.C. The use of geophysical methods to locate joints in underground metal pipelines. Q. J. Eng. Geol. 1988, 21, 273–281. [Google Scholar] [CrossRef]
- Roest, W.R.; Verhoef, J.; Pilkington, M. Magnetic interpretation using the 3-D analytic signal. Geophysics 1992, 57, 116–125. [Google Scholar] [CrossRef]
- Florio, G.; Fedi, M.; Pašteka, R. On the estimation of the structural index from low-pass filtered magnetic data. Geophysics 2014, 79, 67–80. [Google Scholar] [CrossRef] [Green Version]
- Thompson, D.T. EULDPH: A new technique for making computer-assisted depth estimates from magnetic data. Geophysics 1982, 47, 31–37. [Google Scholar] [CrossRef]
- Reid, A.B.; Allsop, J.M.; Granser, H.; Millett, A.J.; Somerton, I.W. Magnetic interpretation in three dimensions using Euler deconvolution. Geophysics 1990, 55, 80–91. [Google Scholar] [CrossRef] [Green Version]
- Milsom, J. Field Geophysics; Wiley: Chichester, UK, 2003. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| F0.5 Configuratio | F3.0 Configuration | |||
|---|---|---|---|---|
| S1 Anomaly | S2 Anomaly | S1 Anomaly | S2 Anomaly | |
| Profile 1 | 1.8 m | 1.8 m | 2.0 m | 1.5 m |
| Profile 2 | 1.6 m | 1.8 m | 2.0 m | 1.8 m |
| Profile 3 | 1.6 m | 1.8 m | 1.8 m | 1.8 m |
| Profile 4 | 1.8 m | 1.8 m | 2.0 m | 1.8 m |
| Profile 5 | 1.8 m | 1.5 m | 1.8 m | 1.8 m |
| Profile 6 | 1.8 m | 1.8 m | 1.8 m | 1.8 m |
| Profile 7 | 1.8 m | 1.8 m | 1.8 m | 1.8 m |
| Mean Value | 1.74 m | 1.76 m | 1.9 m | 1.76 m |
| Standard deviation | 0.10 m | 0.11 m | 0.11 m | 0.11 m |
| Ground Survey | ||||
|---|---|---|---|---|
| L1 Anomaly | L2 Anomaly | L3 Anomaly | ||
| Profile 1 | 1.9 m | 1.5 m | 1.9 m | |
| Profile 2 | 1.5 m | 1.9 m | 1.5 m | |
| Profile 3 | 1.9 m | 1.9 m | 1.9 m | |
| Profile 4 | 1.9 m | 1.9 m | 1.9 m | |
| Profile 5 | 1.9 m | 1.9 m | 1.9 m | |
| Profile 6 | 1.9 m | 1.5 m | 1.9 m | |
| Profile 7 | 1.9 m | 1.9 m | 1.9 m | |
| Profile 8 | 1.9 m | 1.5 m | ||
| Profile 9 | 1.9 m | 1.9 m | ||
| Profile 10 | 1.9 m | 1.5 m | 1.9 m | |
| Profile 11 | 1.9 m | 1.9 m | ||
| Profile 12 | 1.9 m | 1.9 m | 1.9 m | |
| Profile 13 | 1.9 m | 1.5 m | 1.5 m | |
| Profile 14 | 1.9 m | 1.5 m | 1.9 m | |
| Profile 15 | 1.9 m | 1.9 m | ||
| Profile 16 | 1.9 m | 1.9 m | 1.9 m | |
| Profile 17 | 1.9 m | 1.9 m | 1.9 m | |
| Profile 18 | 1.9 m | 1.5 m | 1.5 m | |
| Profile 19 | 2.0 m | 2.0 m | 2.0 m | |
| Profile 20 | 2.0 m | 2.0 m | 2.0 m | |
| Mean value | 1.89 m | 1.7 m | 1.81 m | |
| Standard deviation | 0.10 m | 0.21 m | 0.19 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Accomando, F.; Vitale, A.; Bonfante, A.; Buonanno, M.; Florio, G. Performance of Two Different Flight Configurations for Drone-Borne Magnetic Data. Sensors 2021, 21, 5736. https://doi.org/10.3390/s21175736
Accomando F, Vitale A, Bonfante A, Buonanno M, Florio G. Performance of Two Different Flight Configurations for Drone-Borne Magnetic Data. Sensors. 2021; 21(17):5736. https://doi.org/10.3390/s21175736
Chicago/Turabian StyleAccomando, Filippo, Andrea Vitale, Antonello Bonfante, Maurizio Buonanno, and Giovanni Florio. 2021. "Performance of Two Different Flight Configurations for Drone-Borne Magnetic Data" Sensors 21, no. 17: 5736. https://doi.org/10.3390/s21175736
APA StyleAccomando, F., Vitale, A., Bonfante, A., Buonanno, M., & Florio, G. (2021). Performance of Two Different Flight Configurations for Drone-Borne Magnetic Data. Sensors, 21(17), 5736. https://doi.org/10.3390/s21175736