
P300 Brain–Computer Interface-Based Drone Control in Virtual and Augmented Reality


Abstract
:1. Introduction
2. Materials and Methods
2.1. Application Development
2.1.1. Development Environment
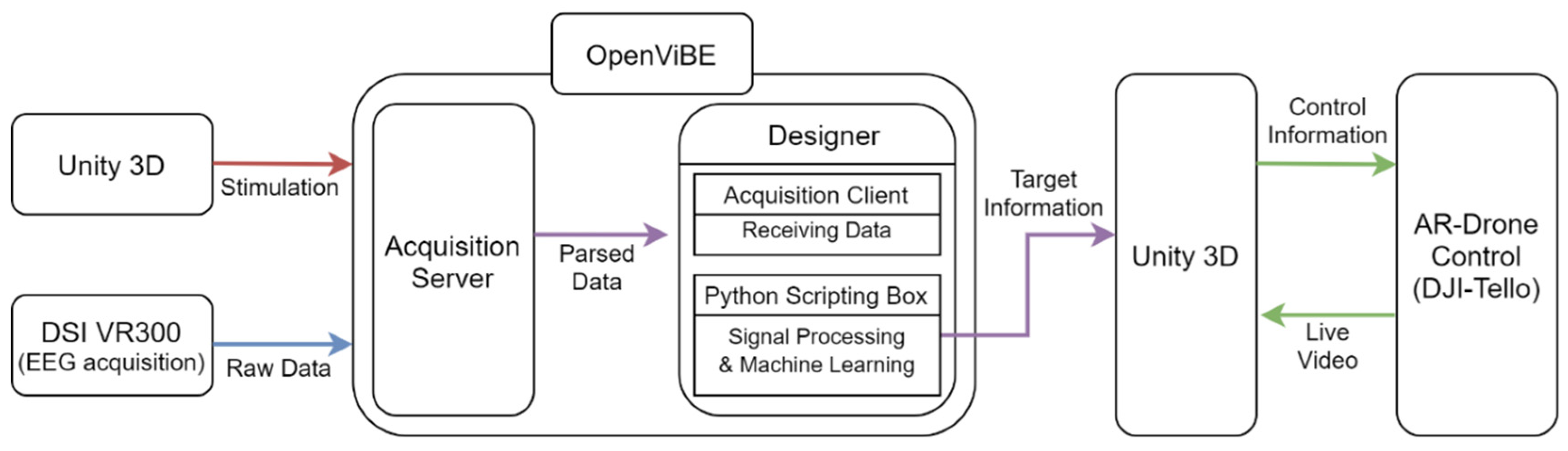
2.1.2. System of Drone Control Application
2.1.3. Signal Processing and Classification
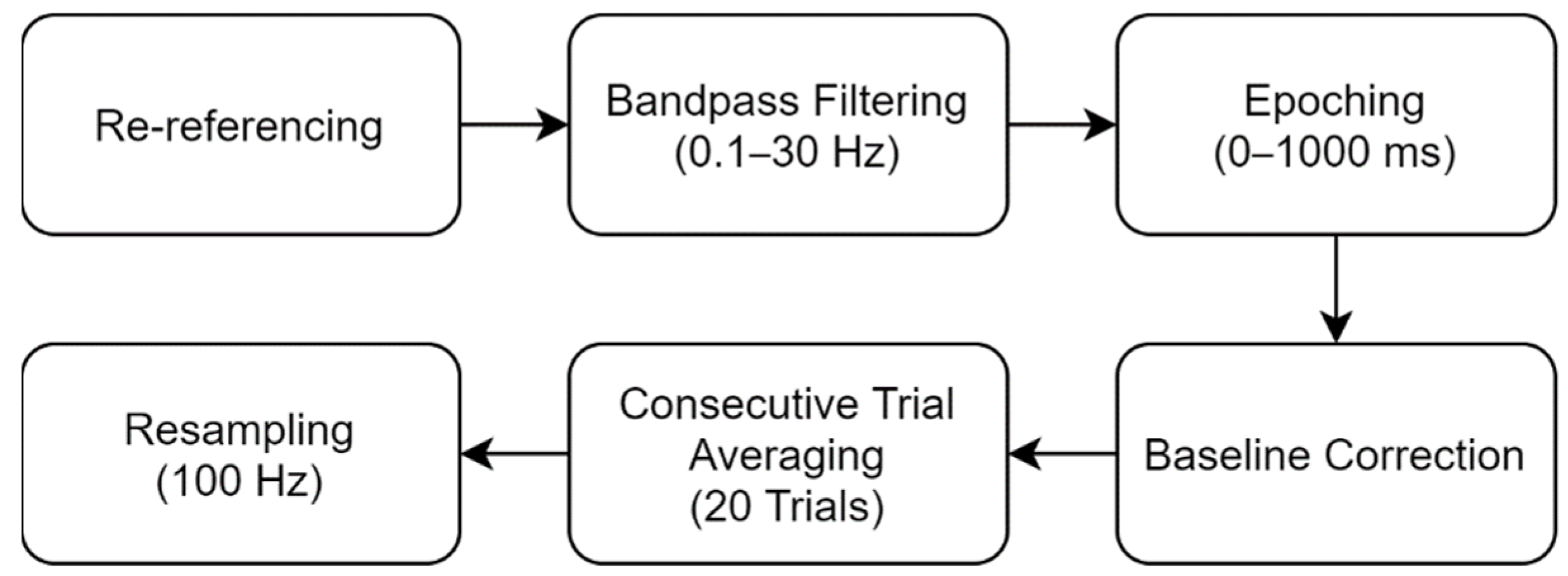
- Re-referencing: seven channels (Fz, Pz, Oz, P3, P4, PO7, and PO8) were re-referenced using a channel on the left ear.
- Bandpass filtering: data were filtered to the frequency band of 0.1–30 Hz using the SciPy package with the 5th order Butterworth filter [36].
- Epoching: data were segmented to 0–1000 ms epochs from each stimulus onset.
- Baseline Correction: Each epoch’s mean value was subtracted from the epoch. EEG signals are prone to amplitude shifts attributable to such factors including changes in impedance or noise, which can be fatal in the data analysis. Baseline correction compensates for this random amplitude shift.
- Consecutive Trial Averaging: to improve the signal-to-noise ratio (SNR), segmented epochs were averaged continuously by 20 epochs.
- Resampling: Brain signals were digitized originally at a sampling rate of 300 Hz. To reduce the data size, signals were down-sampled to 100 Hz.
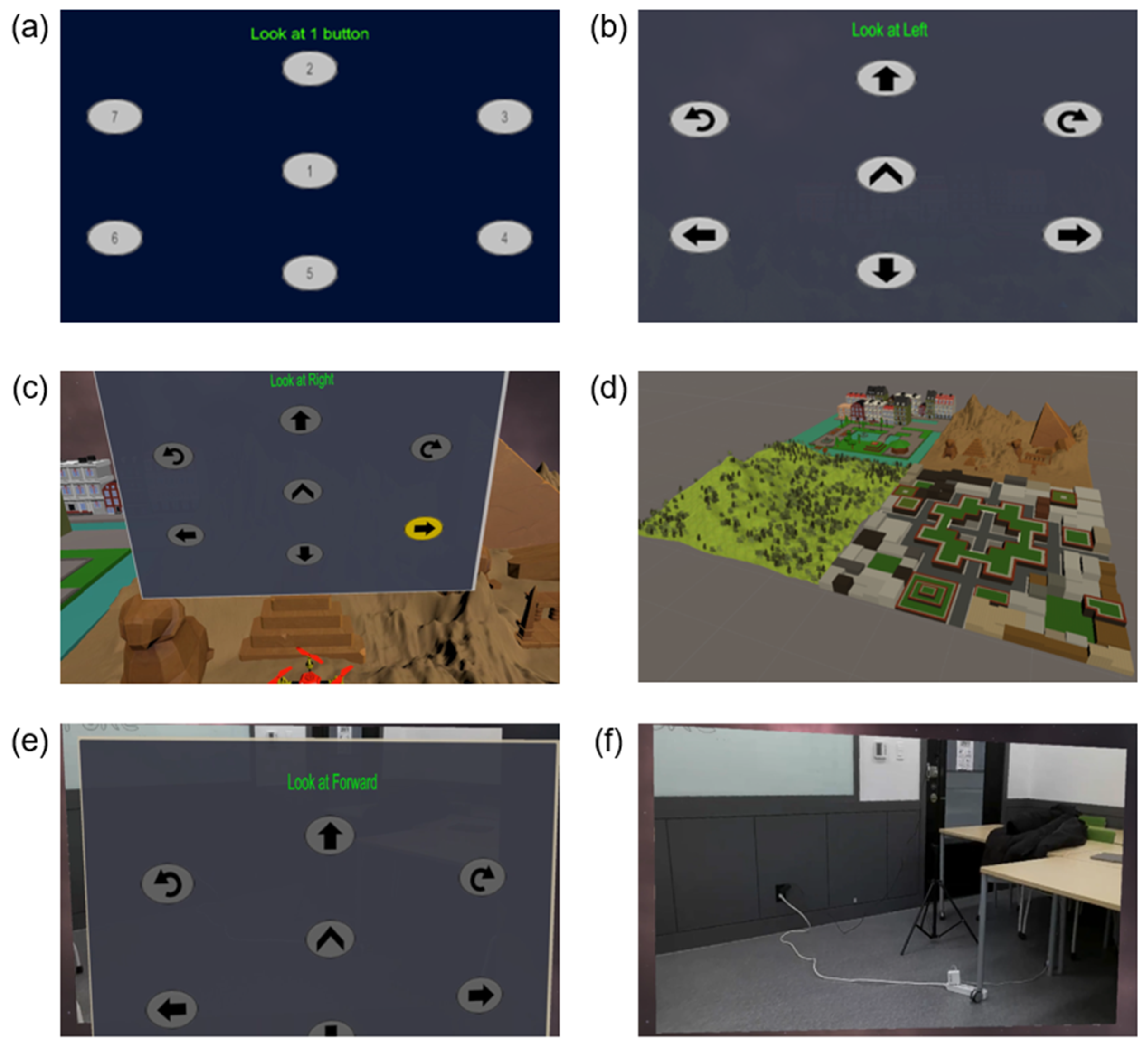
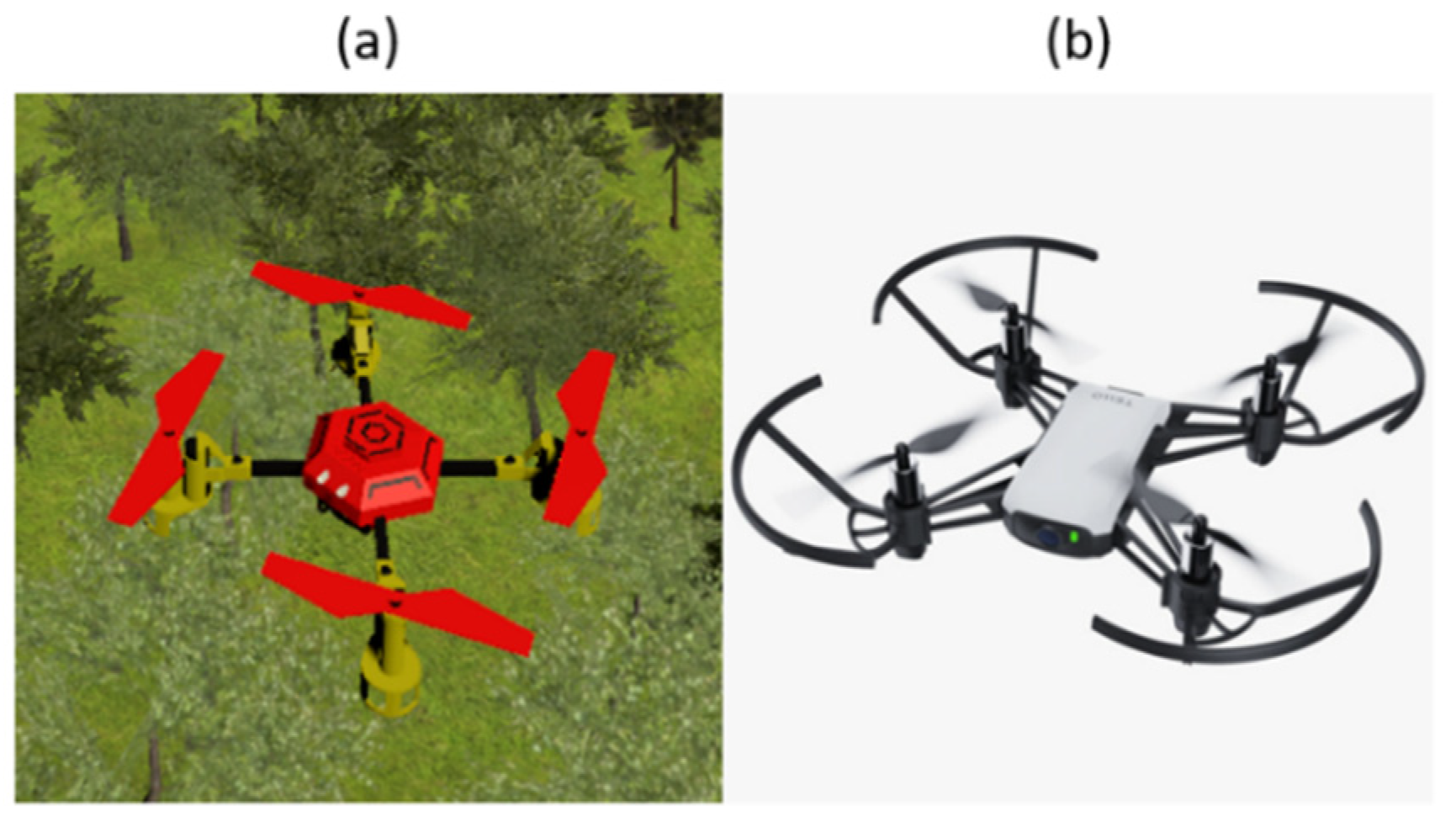
2.1.4. Game Scenario and Contents
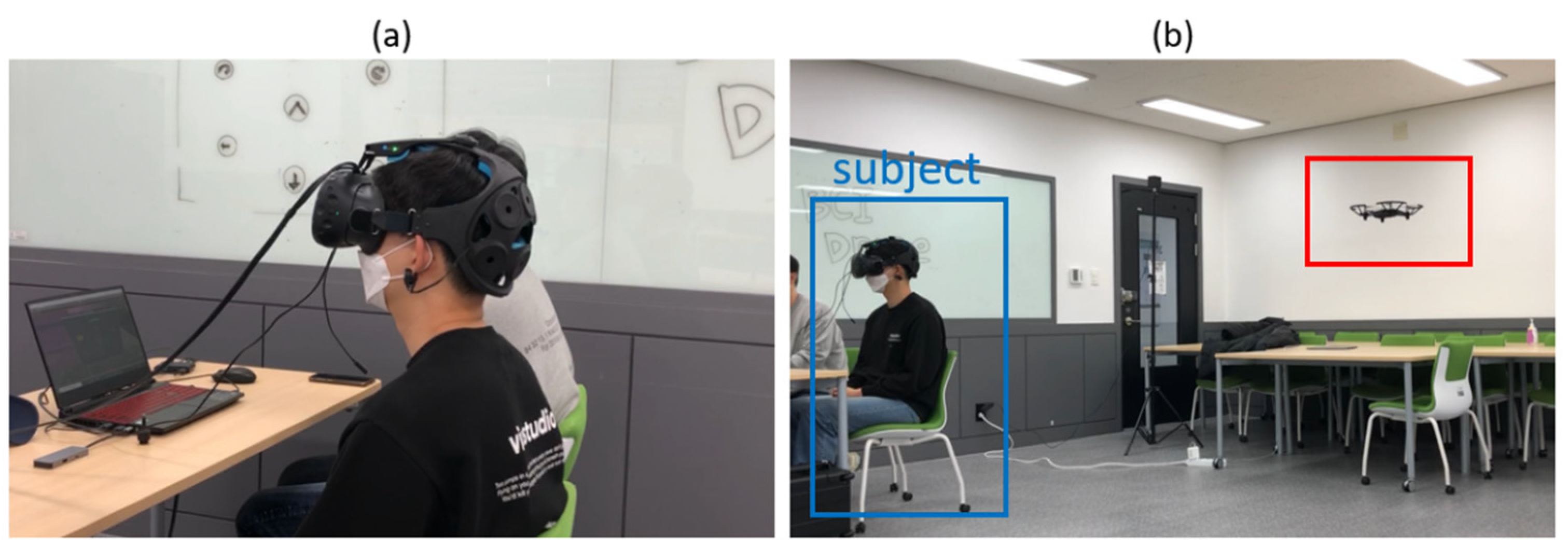
2.2. Experiment
2.2.1. Subjects
2.2.2. Questionnaire
2.2.3. Analysis and Statistical Tests
3. Results
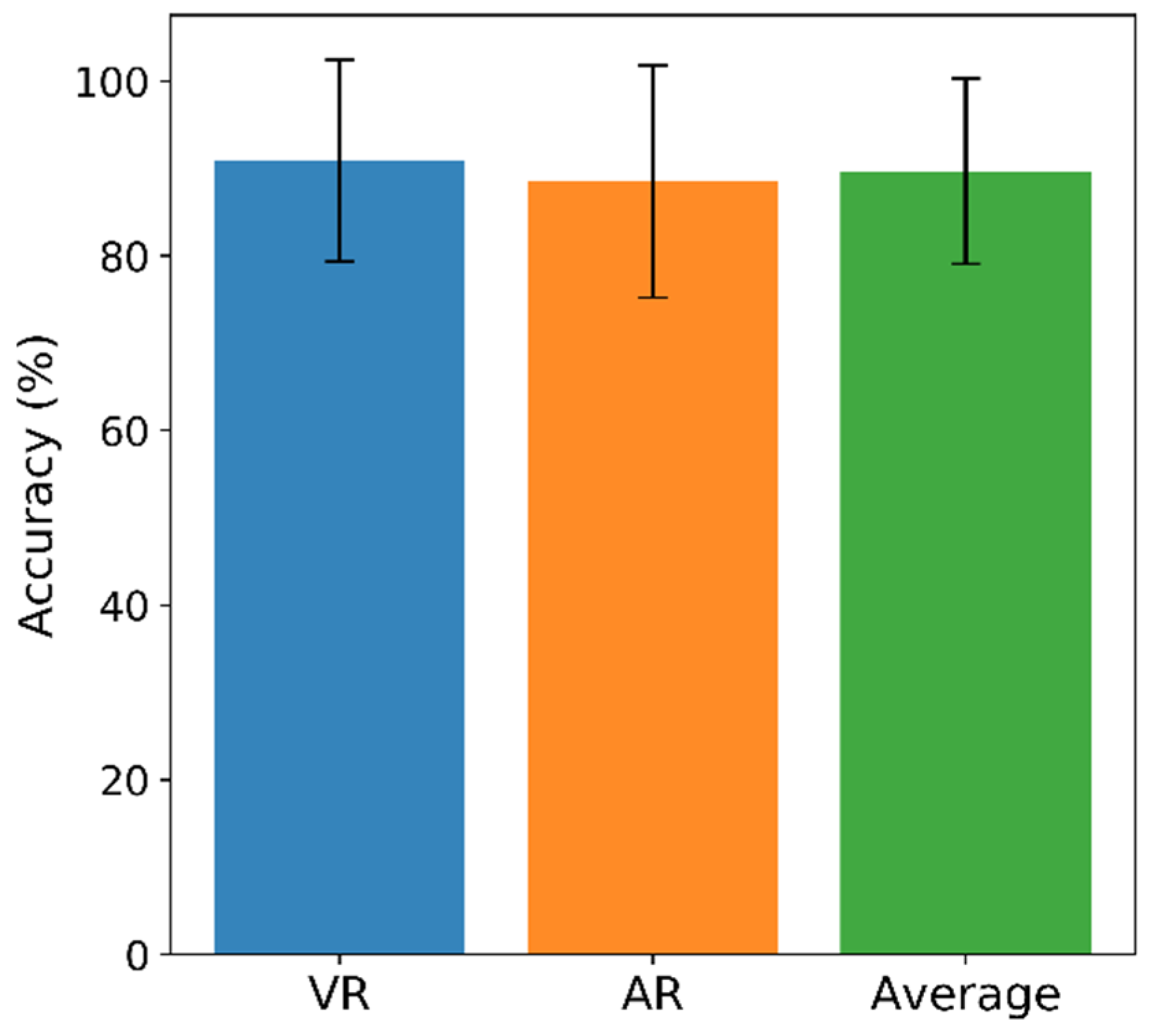
3.1. Online Performance in AR and VR
3.1.1. Accuracy in VR and AR
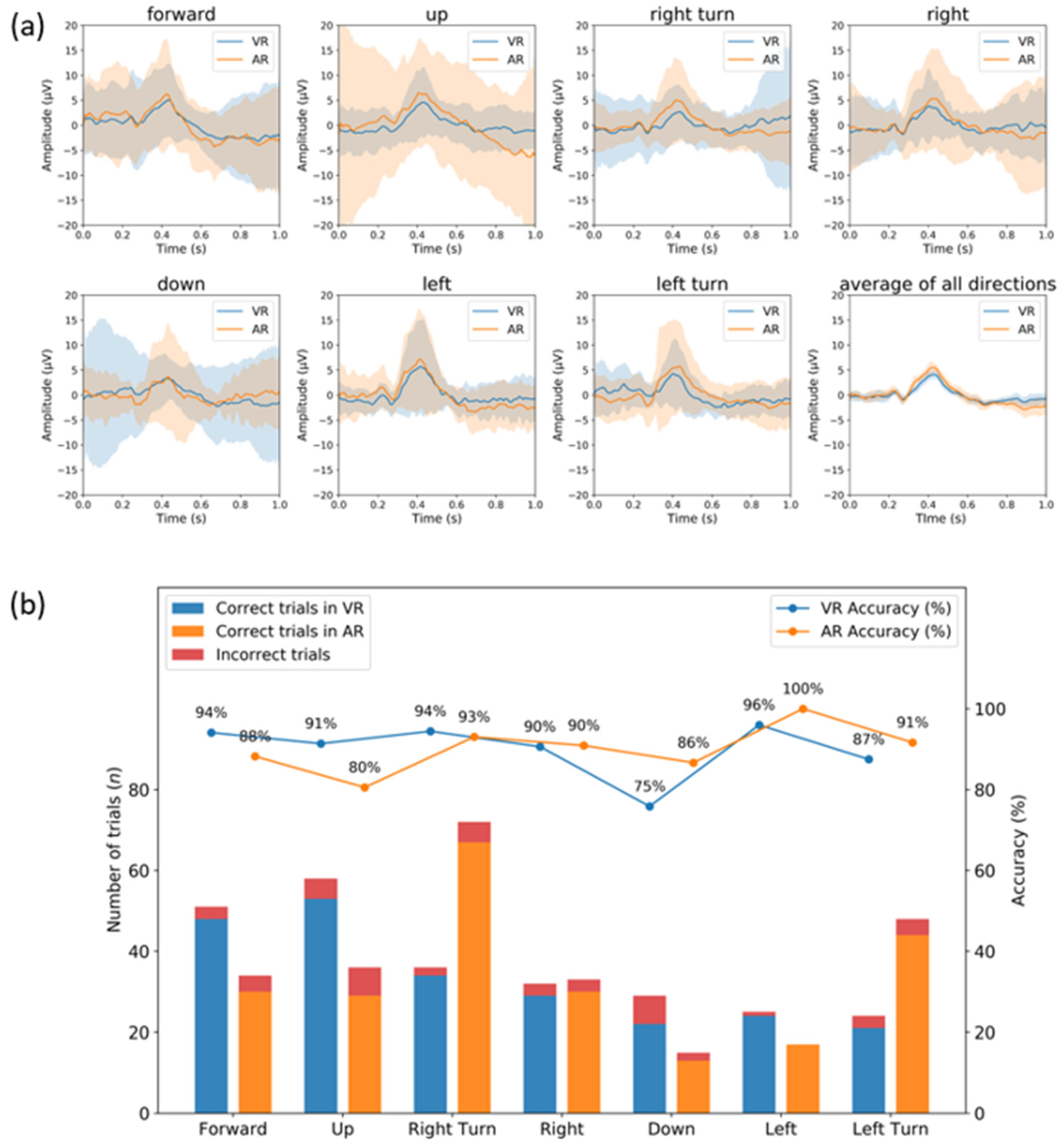
3.1.2. ERP in AR and VR
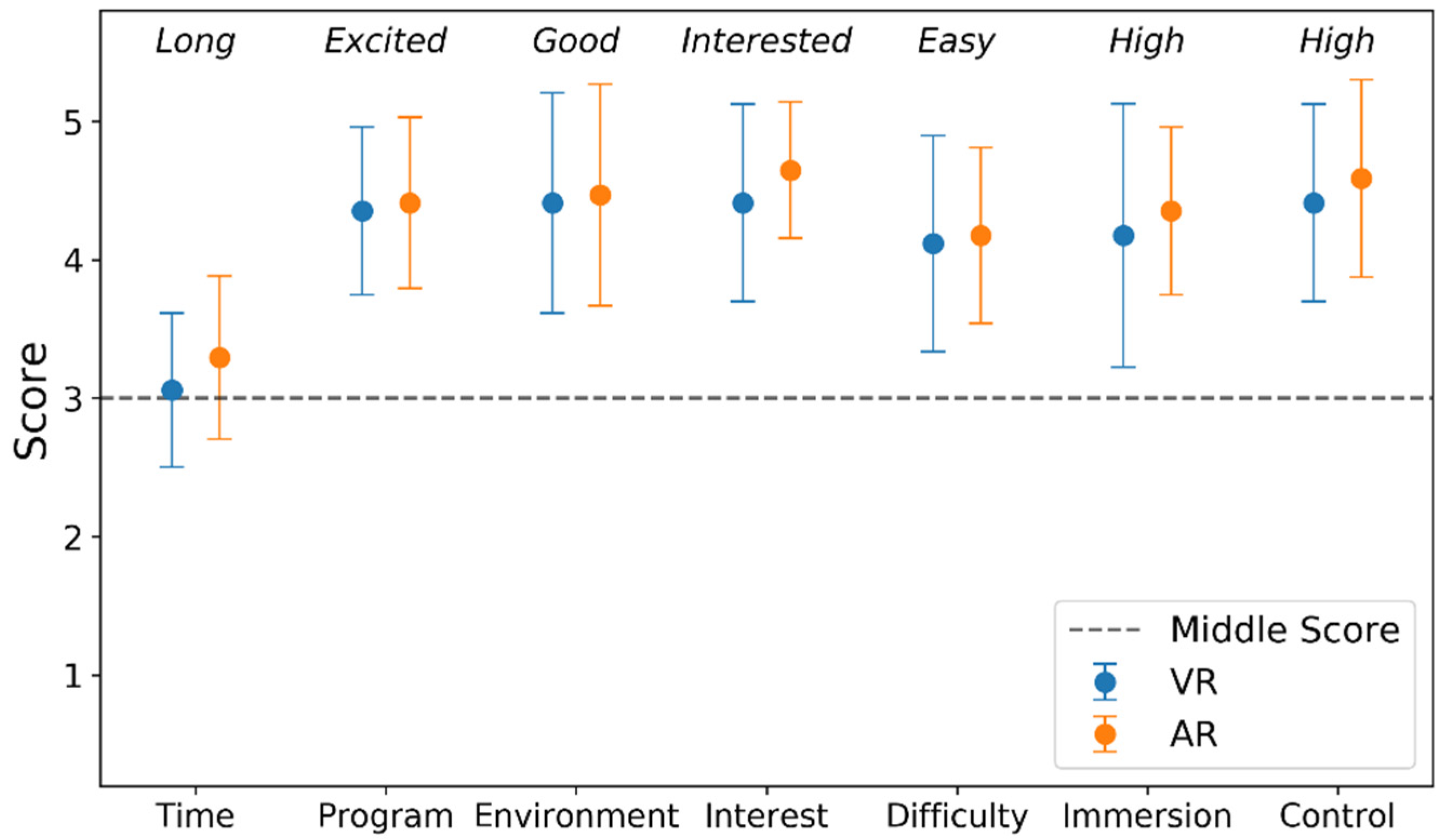
3.2. User Experience in AR and VR
3.2.1. Satisfaction
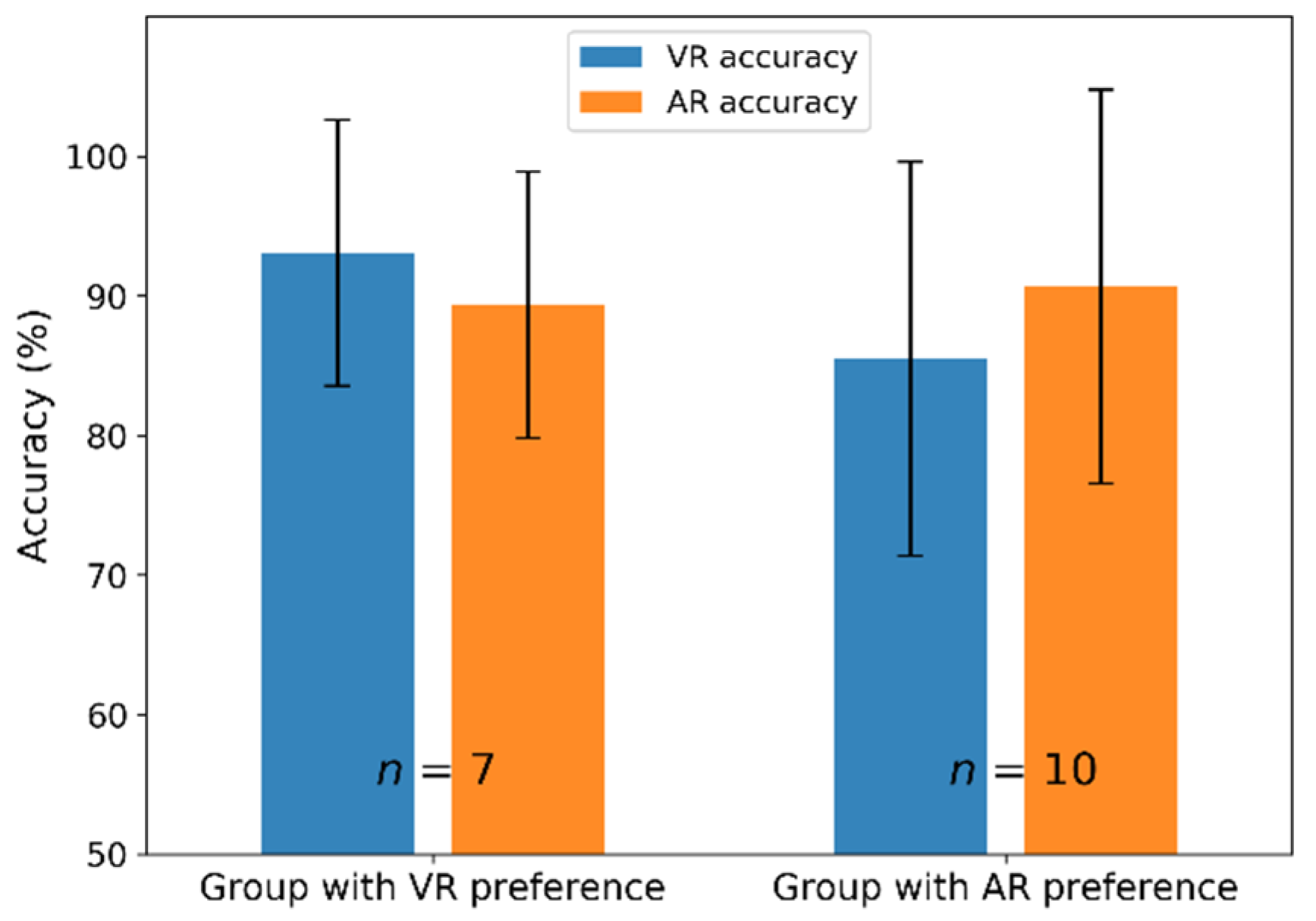
3.2.2. Accuracy According to Preference
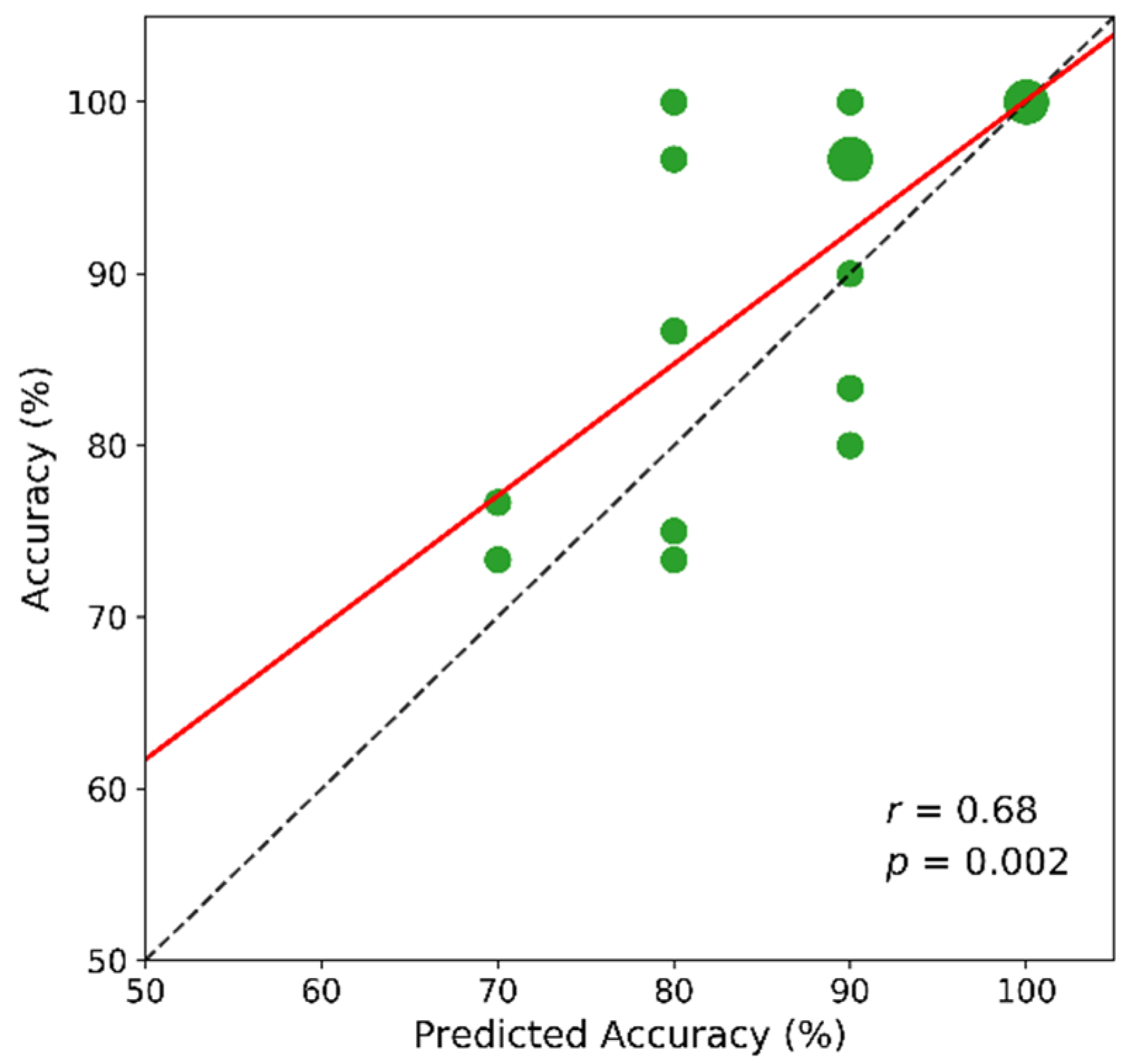
3.2.3. User’s Self-Predicted Performance
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wolpaw, J.; Wolpaw, E.W. Brain-Computer Interfaces: Principles and Practice; Oxford University Press: Oxford, UK, 2012; ISBN 978-0-19-992148-5. [Google Scholar]
- Si-Mohammed, H.; Petit, J.; Jeunet, C.; Argelaguet, F.; Spindler, F.; Évain, A.; Roussel, N.; Casiez, G.; Lecuyer, A. Towards BCI-Based Interfaces for Augmented Reality: Feasibility, Design and Evaluation. IEEE Trans. Vis. Comput. Graph. 2020, 26, 1608–1621. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fazel-Rezai, R.; Allison, B.Z.; Guger, C.; Sellers, E.W.; Kleih, S.C.; Kübler, A. P300 Brain Computer Interface: Current Challenges and Emerging Trends. Front. Neuroeng. 2012, 5, 14. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Farwell, L.A.; Donchin, E. Talking off the Top of Your Head: Toward a Mental Prosthesis Utilizing Event-Related Brain Potentials. Electroencephalogr. Clin. Neurophysiol. 1988, 70, 510–523. [Google Scholar] [CrossRef]
- Cattan, G.; Andreev, A.; Visinoni, E. Recommendations for Integrating a P300-Based Brain–Computer Interface in Virtual Reality Environments for Gaming: An Update. Computers 2020, 9, 92. [Google Scholar] [CrossRef]
- Aamer, A.; Esawy, A.; Swelam, O.; Nabil, T.; Anwar, A.; Eldeib, A. BCI Integrated with VR for Rehabilitation. In Proceedings of the 2019 31st International Conference on Microelectronics (ICM), Cairo, Egypt, 15–18 December 2019; pp. 166–169. [Google Scholar]
- Mercado, J.; Espinosa-Curiel, I.; Escobedo, L.; Tentori, M. Developing and Evaluating a BCI Video Game for Neurofeedback Training: The Case of Autism. Multimed. Tools Appl. 2019, 78, 13675–13712. [Google Scholar] [CrossRef]
- McMahon, M.; Schukat, M. A Low-Cost, Open-Source, BCI-VR Prototype for Real-Time Signal Processing of EEG to Manipulate 3D VR Objects as a Form of Neurofeedback. In Proceedings of the 2018 29th Irish Signals and Systems Conference (ISSC), Belfast, UK, 21–22 June 2018; pp. 1–6. [Google Scholar]
- Rohani, D.A.; Puthusserypady, S. BCI inside a Virtual Reality Classroom: A Potential Training Tool for Attention. EPJ Nonlinear Biomed. Phys. 2015, 3, 12. [Google Scholar] [CrossRef] [Green Version]
- Ali, A.; Puthusserypady, S. A 3D Learning Playground for Potential Attention Training in ADHD: A Brain Computer Interface Approach. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 67–70. [Google Scholar]
- Arpaia, P.; De Benedetto, E.; Donato, N.; Duraccio, L.; Moccaldi, N. A Wearable SSVEP BCI for AR-Based, Real-Time Monitoring Applications. In Proceedings of the 2021 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Lausanne, Switzerland, 23–25 June 2021; pp. 1–6. [Google Scholar]
- Arpaia, P.; Duraccio, L.; Moccaldi, N.; Rossi, S. Wearable Brain–Computer Interface Instrumentation for Robot-Based Rehabilitation by Augmented Reality. IEEE Trans. Instrum. Meas. 2020, 69, 6362–6371. [Google Scholar] [CrossRef]
- Park, S.; Cha, H.; Kwon, J.; Kim, H.; Im, C. Development of an Online Home Appliance Control System Using Augmented Reality and an SSVEP-Based Brain-Computer Interface. In Proceedings of the 2020 8th International Winter Conference on Brain-Computer Interface (BCI), Gangwon, Korea, 26–28 February 2020; pp. 1–2. [Google Scholar]
- Wang, M.; Li, R.; Zhang, R.; Li, G.; Zhang, D. A Wearable SSVEP-Based BCI System for Quadcopter Control Using Head-Mounted Device. IEEE Access 2018, 6, 26789–26798. [Google Scholar] [CrossRef]
- Kerous, B.; Liarokapis, F. BrainChat—A Collaborative Augmented Reality Brain Interface for Message Communication. In Proceedings of the 2017 IEEE International Symposium on Mixed and Augmented Reality (ISMAR-Adjunct), Nantes, France, 9–13 October 2017; pp. 279–283. [Google Scholar]
- Zeng, H.; Wang, Y.; Wu, C.; Song, A.; Liu, J.; Ji, P.; Xu, B.; Zhu, L.; Li, H.; Wen, P. Closed-Loop Hybrid Gaze Brain-Machine Interface Based Robotic Arm Control with Augmented Reality Feedback. Front. Neurorobot. 2017, 11, 60. [Google Scholar] [CrossRef] [Green Version]
- Tidoni, E.; Abu-Alqumsan, M.; Leonardis, D.; Kapeller, C.; Fusco, G.; Guger, C.; Hintermüller, C.; Peer, A.; Frisoli, A.; Tecchia, F.; et al. Local and Remote Cooperation With Virtual and Robotic Agents: A P300 BCI Study in Healthy and People Living with Spinal Cord Injury. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 1622–1632. [Google Scholar] [CrossRef]
- Borges, L.R.; Martins, F.R.; Naves, E.L.M.; Bastos, T.F.; Lucena, V.F. Multimodal System for Training at Distance in a Virtual or Augmented Reality Environment for Users of Electric-Powered Wheelchairs. IFAC Pap. 2016, 49, 156–160. [Google Scholar] [CrossRef]
- Bi, L.; Fan, X.; Luo, N.; Jie, K.; Li, Y.; Liu, Y. A Head-Up Display-Based P300 Brain–Computer Interface for Destination Selection. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1996–2001. [Google Scholar] [CrossRef]
- Martens, N.; Jenke, R.; Abu-Alqumsan, M.; Kapeller, C.; Hintermüller, C.; Guger, C.; Peer, A.; Buss, M. Towards Robotic Re-Embodiment Using a Brain-and-Body-Computer Interface. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 5131–5132. [Google Scholar]
- Takano, K.; Hata, N.; Kansaku, K. Towards Intelligent Environments: An Augmented Reality–Brain–Machine Interface Operated with a See-Through Head-Mount Display. Front. Neurosci. 2011, 5, 60. [Google Scholar] [CrossRef] [Green Version]
- Faller, J.; Leeb, R.; Pfurtscheller, G.; Scherer, R. Avatar Navigation in Virtual and Augmented Reality Environments Using an SSVEP BCI. In Proceedings of the 1st International Conference on Apllied Bionics and Biomechanics (ICABB-2010), Venice, Italy, 14–16 October 2010; pp. 1–4. [Google Scholar]
- Lenhardt, A.; Ritter, H. An Augmented-Reality Based Brain-Computer Interface for Robot Control. In Neural Information Processing. Models and Applications; Wong, K.W., Mendis, B.S.U., Bouzerdoum, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 58–65. [Google Scholar]
- Ke, Y.; Liu, P.; An, X.; Song, X.; Ming, D. An Online SSVEP-BCI System in an Optical See-through Augmented Reality Environment. J. Neural Eng. 2020, 17, 016066. [Google Scholar] [CrossRef] [PubMed]
- Barrera, A. Advances in Robot Navigation; BoD–Books on Demand: Norderstedt, Germany, 2011; ISBN 978-953-307-346-0. [Google Scholar]
- Woo, S.; Lee, J.; Kim, H.; Chun, S.; Lee, D.; Gwon, D.; Ahn, M. An Open Source-Based BCI Application for Virtual World Tour and Its Usability Evaluation. Front. Hum. Neurosci. 2021, 18, 388. [Google Scholar] [CrossRef]
- Finke, A.; Lenhardt, A.; Ritter, H. The MindGame: A P300-Based Brain–Computer Interface Game. Neural Netw. 2009, 22, 1329–1333. [Google Scholar] [CrossRef]
- Winograd, M.R.; Rosenfeld, J.P. Mock Crime Application of the Complex Trial Protocol (CTP) P300-Based Concealed Information Test. Psychophysiol. 2011, 48, 155–161. [Google Scholar] [CrossRef]
- He, S.; Zhang, R.; Wang, Q.; Chen, Y.; Yang, T.; Feng, Z.; Zhang, Y.; Shao, M.; Li, Y. A P300-Based Threshold-Free Brain Switch and Its Application in Wheelchair Control. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 715–725. [Google Scholar] [CrossRef]
- Wu, Z.; Lai, Y.; Xia, Y.; Wu, D.; Yao, D. Stimulator Selection in SSVEP-Based BCI. Med. Eng. Phys. 2008, 30, 1079–1088. [Google Scholar] [CrossRef] [PubMed]
- Chabuda, A.; Durka, P.; Żygierewicz, J. High Frequency SSVEP-BCI With Hardware Stimuli Control and Phase-Synchronized Comb Filter. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 344–352. [Google Scholar] [CrossRef]
- Renard, Y.; Lotte, F.; Gibert, G.; Congedo, M.; Maby, E.; Delannoy, V.; Bertrand, O.; Lécuyer, A. OpenViBE: An Open-Source Software Platform to Design, Test, and Use Brain–Computer Interfaces in Real and Virtual Environments. Presence Teleoperators Virtual Environ. 2010, 19, 35–53. [Google Scholar] [CrossRef] [Green Version]
- Unity at 10: For Better—Or Worse—Game Development Has Never Been Easier|Ars Technica. Available online: https://arstechnica.com/gaming/2016/09/unity-at-10-for-better-or-worse-game-development-has-never-been-easier/ (accessed on 23 March 2021).
- Komori, A. Comoc/TelloForUnity. 2020. Available online: https://github.com/comoc/TelloForUnity (accessed on 26 March 2021).
- BCILab. AhnBCILab/BCI_Drone. 2021. Available online: https://github.com/AhnBCILab/BCI_Drone (accessed on 26 March 2021).
- Scipy. Signal. Butter—SciPy v1.6.1 Reference Guide. Available online: https://docs.scipy.org/doc/scipy/reference/generated/scipy.signal.butter.html (accessed on 22 March 2021).
- Lotte, F.; Congedo, M.; Lécuyer, A.; Lamarche, F.; Arnaldi, B.A. Review of Classification Algorithms for EEG-Based Brain–Computer Interfaces. J. Neural Eng. 2007, 4, R1–R13. [Google Scholar] [CrossRef]
- Krusienski, D.J.; Sellers, E.W.; Cabestaing, F.; Bayoudh, S.; McFarland, D.J.; Vaughan, T.M.; Wolpaw, J.R. A Comparison of Classification Techniques for the P300 Speller. J. Neural Eng. 2006, 3, 299–305. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Polich, J. On the Relationship between EEG and P300: Individual Differences, Aging, and Ultradian Rhythms. Int. J. Psychophysiol. 1997, 26, 299–317. [Google Scholar] [CrossRef]
- DSI VR300. Available online: https://wearablesensing.com/products/vr300/ (accessed on 29 March 2021).
- Tello. Available online: https://www.ryzerobotics.com/kr/tello (accessed on 29 March 2021).
- Carlson, S.R.; Katsanis, J.; Iacono, W.G.; Mertz, A.K. Substance Dependence and Externalizing Psychopathology in Adolescent Boys with Small, Average, or Large P300 Event-Related Potential Amplitude. Psychophysiology 1999, 36, 583–590. [Google Scholar] [CrossRef] [PubMed]
- Baykara, E.; Ruf, C.A.; Fioravanti, C.; Käthner, I.; Simon, N.; Kleih, S.C.; Kübler, A.; Halder, S. Effects of Training and Motivation on Auditory P300 Brain–Computer Interface Performance. Clin. Neurophysiol. 2016, 127, 379–387. [Google Scholar] [CrossRef]
- Benjamini, Y.; Hochberg, Y. Controlling the False Discovery Rate: A Practical and Powerful Approach to Multiple Testing. J. R. Stat. Soc. Ser. B Methodol. 1995, 57, 289–300. [Google Scholar] [CrossRef]
- Genovese, C.R.; Lazar, N.A.; Nichols, T. Thresholding of Statistical Maps in Functional Neuroimaging Using the False Discovery Rate. NeuroImage 2002, 15, 870–878. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Won, K.; Kwon, M.; Jang, S.; Ahn, M.; Jun, S.C. P300 Speller Performance Predictor Based on RSVP Multi-Feature. Front. Hum. Neurosci. 2019, 13, 261. [Google Scholar] [CrossRef] [Green Version]
- Ahn, M.; Cho, H.; Ahn, S.; Jun, S.C. User’s Self-Prediction of Performance in Motor Imagery Brain–Computer Interface. Front. Hum. Neurosci. 2018, 12, 59. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Halder, S.; Hammer, E.M.; Kleih, S.C.; Bogdan, M.; Rosenstiel, W.; Birbaumer, N.; Kübler, A. Prediction of Auditory and Visual P300 Brain-Computer Interface Aptitude. PLoS ONE 2013, 8, e53513. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, P.; Guo, D.; Yao, D. Prediction of SSVEP-Based BCI Performance by the Resting-State EEG Network. J. Neural Eng. 2013, 10, 066017. [Google Scholar] [CrossRef] [Green Version]
- Lin, C.-T.; Do, T.-T.N. Direct-Sense Brain–Computer Interfaces and Wearable Computers. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 298–312. [Google Scholar] [CrossRef]
- Lotte, F.; Faller, J.; Guger, C.; Renard, Y.; Pfurtscheller, G.; Lécuyer, A.; Leeb, R. Combining BCI with Virtual Reality: Towards New Applications and Improved BCI. In Towards Practical Brain-Computer Interfaces: Bridging the Gap from Research to Real-World Applications; Biological and Medical Physics, Biomedical Engineering; Allison, B.Z., Dunne, S., Leeb, R., Del R. Millán, J., Nijholt, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 197–220. ISBN 978-3-642-29746-5. [Google Scholar]
- Putze, F.; Vourvopoulos, A.; Lécuyer, A.; Krusienski, D.; Bermúdez i Badia, S.; Mullen, T.; Herff, C. Editorial: Brain-Computer Interfaces and Augmented/Virtual Reality. Front. Hum. Neurosci. 2020, 14, 144. [Google Scholar] [CrossRef]
- Blair, R.C.; Higgins, J.J. A Comparison of the Power of the Paired Samples Rank Transform Statistic to That of Wilcoxon’s Signed Ranks Statistic. J. Educ. Stat. 1985, 10, 368–383. [Google Scholar] [CrossRef]
- Kanyongo, G.; Brook, G.; Kyei-Blankson, L.; Gocmen, G. Reliability and Statistical Power: How Measurement Fallibility Affects Power and Required Sample Sizes for Several Parametric and Nonparametric Statistics. J. Mod. Appl. Stat. Methods 2007, 6, 9. [Google Scholar] [CrossRef]
- Lotte, F.; Bougrain, L.; Clerc, M. Electroencephalography (EEG)-Based Brain-Computer Interfaces. In Wiley Encyclopedia of Electrical and Electronics Engineering; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2015; p. 44. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Won, K.; Kwon, M.; Jun, S.C.; Ahn, M. CNN with Large Data Achieves True Zero-Training in Online P300 Brain-Computer Interface. IEEE Access 2020, 8, 74385–74400. [Google Scholar] [CrossRef]
- Lotte, F.; Guan, C. An Efficient P300-Based Brain-Computer Interface with Minimal Calibration Time. In Proceedings of the Assistive Machine Learning for People with Disabilities symposium (NIPS’09 Symposium), Vancouver, BC, Canada, 10 December 2009. [Google Scholar]
- Rivet, B.; Cecotti, H.; Perrin, M.; Maby, E.; Mattout, J. Adaptive Training Session for a P300 Speller Brain–Computer Interface. J. Physiol. Paris 2011, 105, 123–129. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schirrmeister, R.T.; Springenberg, J.T.; Fiederer, L.D.J.; Glasstetter, M.; Eggensperger, K.; Tangermann, M.; Hutter, F.; Burgard, W.; Ball, T. Deep Learning with Convolutional Neural Networks for EEG Decoding and Visualization. Hum. Brain Mapp. 2017, 38, 5391–5420. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rashid, M.; Sulaiman, N.; PP Abdul Majeed, A.; Musa, R.M.; Ab. Nasir, A.F.; Bari, B.S.; Khatun, S. Current Status, Challenges, and Possible Solutions of EEG-Based Brain-Computer Interface: A Comprehensive Review. Front. Neurorobot. 2020, 14, 25. [Google Scholar] [CrossRef] [PubMed]
- Lawhern, V.J.; Solon, A.J.; Waytowich, N.R.; Gordon, S.M.; Hung, C.P.; Lance, B.J. EEGNet: A Compact Convolutional Neural Network for EEG-Based Brain–Computer Interfaces. J. Neural Eng. 2018, 15, 056013. [Google Scholar] [CrossRef] [PubMed] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Environment | Application Contents | Study | BCI-Paradigm | Display Type/ (AR Type) |
|---|---|---|---|---|
| VR | Post-stroke rehabilitation | Aamer et al. [6] | MI | HMD |
| Attention training | Mercado et al. [7] | Neurofeedback | HMD | |
| BCI system | McMahon et al. [8] | MI | HMD | |
| Attention training | Rohani et al. [9] | P300 | HMD | |
| Attention training | Ali et al. [10] | SSVEP | HMD | |
| AR | Real-time monitoring applications | Arpaia et al. [11] | SSVEP | HMD/OST |
| Robot-based rehabilitation | Arpaia et al. [12] | SSVEP | HMD/OST | |
| Robot control | Si-Mohammed et al. [2] | SSVEP | HMD/OST | |
| Home appliance control | Park et al. [13] | SSVEP | HMD/OST | |
| Quadcopter control | Wang et al. [14] | SSVEP | HMD/VST | |
| Communication | Kerous et al. [15] | P300 | HMD/VST | |
| Robotic arm control | Zeng et al. [16] | MI | CS/VST | |
| Robot control | Tidoni et al. [17] | P300 | HMD/VST | |
| Wheelchair control | Borges et al. [18] | SSVEP | HMD/VST | |
| Feasibility study | Bi et al. [19] | P300 | head-up display | |
| Robot control | Martens et al. [20] | P300, SSVEP | HMD/VST | |
| Light and TV control | Takano et al. [21] | P300 | HMD/OST | |
| Robot control | Faller et al. [22] | SSVEP | HMD/VST | |
| Robotic arm control | Lenhardt et al. [23] | P300 | HMD/VST |
| Questionnaires | Question | Answer Format |
|---|---|---|
| Pre | Do you have mental disease? | Yes or No |
| Have you ever participated in a BCI experiment? | Yes or No | |
| Have you ever experienced AR or VR contents? | Yes or No | |
| Have you ever experienced 3D motion sickness? | Yes or No | |
| Did you sleep well for more than 6 h? | Yes or No | |
| Did you drink coffee within 24 h? | Yes or No | |
| Did you drink within 24 h? | Yes or No | |
| Did you smoke within 24 h? | Yes or No | |
| Evaluate your physical condition. | 1 to 5 (good) | |
| Evaluate your mental condition. | 1 to 5 (good) | |
| Post (VR and AR) | Evaluate the playing time (time). | 1 to 5 (long) |
| Evaluate how you feel about this application (program). | 1 to 5 (excited) | |
| Evaluate the comfort of surroundings (environment). | 1 to 5 (good) | |
| Were you interested in the application (interest)? | 1 to 5 (interested) | |
| Was the application difficult (difficulty)? | 1 to 5 (easy) | |
| Evaluate the immersiveness of the application (immersion). | 1 to 5 (high) | |
| Evaluate the ability to control the drone (control). | 1 to 5 (high) | |
| Did you feel 3D motion sickness? | Yes or No | |
| Please predict your performance. | 1 to 10 (high) | |
| What do you prefer, VR or AR? | VR or AR |
| Subject No. | Accuracy (%) | 3D Sickness | Preference | |||
|---|---|---|---|---|---|---|
| VR | AR | Mean | VR | AR | ||
| S1 | 90.00 | 60.00 | 75.00 | N | N | VR |
| S2 | 66.67 | 80.00 | 73.33 | Y | N | AR |
| S3 | 95.00 | 85.00 | 90.00 | N | N | VR |
| S4 | 80.00 | 73.33 | 76.67 | N | N | AR |
| S5 | 80.00 | 66.67 | 73.33 | N | Y | AR |
| S6 | 100.00 | 100.00 | 100.00 | N | N | AR |
| S8 | 100.00 | 100.00 | 100.00 | N | N | AR |
| S9 | 73.33 | 86.67 | 80.00 | N | N | AR |
| S10 | 73.33 | 93.33 | 83.33 | N | N | VR |
| S11 | 93.33 | 100.00 | 96.67 | N | N | VR |
| S14 | 100.00 | 73.33 | 86.67 | N | N | VR |
| S15 | 100.00 | 100.00 | 100.00 | N | N | AR |
| S16 | 100.00 | 93.33 | 96.67 | Y | Y | VR |
| S17 | 100.00 | 100.00 | 100.00 | N | N | AR |
| S18 | 100.00 | 93.33 | 96.67 | N | Y | VR |
| S19 | 93.33 | 100.00 | 96.67 | N | N | AR |
| S20 | 100.00 | 100.00 | 100.00 | N | N | AR |
| Subject No. | Latency (ms) | Amplitude (μV) | ||
|---|---|---|---|---|
| VR | AR | VR | AR | |
| S1 | 410 | 420 | 5.65 | 6.05 |
| S2 | 390 | 410 | 3.7 | 2.16 |
| S3 | 390 | 380 | 2.72 | 4.97 |
| S4 | 420 | 410 | 2.49 | 2.54 |
| S5 | 440 | 430 | 9.05 | 5.28 |
| S6 | 460 | 440 | 4.35 | 7.72 |
| S8 | 420 | 410 | 3.8 | 4.74 |
| S9 | 420 | 420 | 7.19 | 5.62 |
| S10 | 400 | 400 | 2.25 | 2.94 |
| S11 | 430 | 430 | 2.94 | 3.09 |
| S14 | 370 | 340 | 4.48 | 9.01 |
| S15 | 400 | 400 | 3.17 | 3.1 |
| S16 | 420 | 430 | 1.47 | 2.24 |
| S17 | 410 | 400 | 3.89 | 2.76 |
| S18 | 450 | 430 | 3.59 | 2.86 |
| S19 | 400 | 410 | 22.85 | 37.05 |
| S20 | 440 | 440 | 2.88 | 3.53 |
| Mean | 415.88 | 411.76 | 5.09 | 6.22 |
| SD | 22.77 | 23.82 | 4.79 | 7.94 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.; Lee, S.; Kang, H.; Kim, S.; Ahn, M. P300 Brain–Computer Interface-Based Drone Control in Virtual and Augmented Reality. Sensors 2021, 21, 5765. https://doi.org/10.3390/s21175765
Kim S, Lee S, Kang H, Kim S, Ahn M. P300 Brain–Computer Interface-Based Drone Control in Virtual and Augmented Reality. Sensors. 2021; 21(17):5765. https://doi.org/10.3390/s21175765
Chicago/Turabian StyleKim, Soram, Seungyun Lee, Hyunsuk Kang, Sion Kim, and Minkyu Ahn. 2021. "P300 Brain–Computer Interface-Based Drone Control in Virtual and Augmented Reality" Sensors 21, no. 17: 5765. https://doi.org/10.3390/s21175765
APA StyleKim, S., Lee, S., Kang, H., Kim, S., & Ahn, M. (2021). P300 Brain–Computer Interface-Based Drone Control in Virtual and Augmented Reality. Sensors, 21(17), 5765. https://doi.org/10.3390/s21175765