
A SLIC-DBSCAN Based Algorithm for Extracting Effective Sky Region from a Single Star Image


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Background and Base
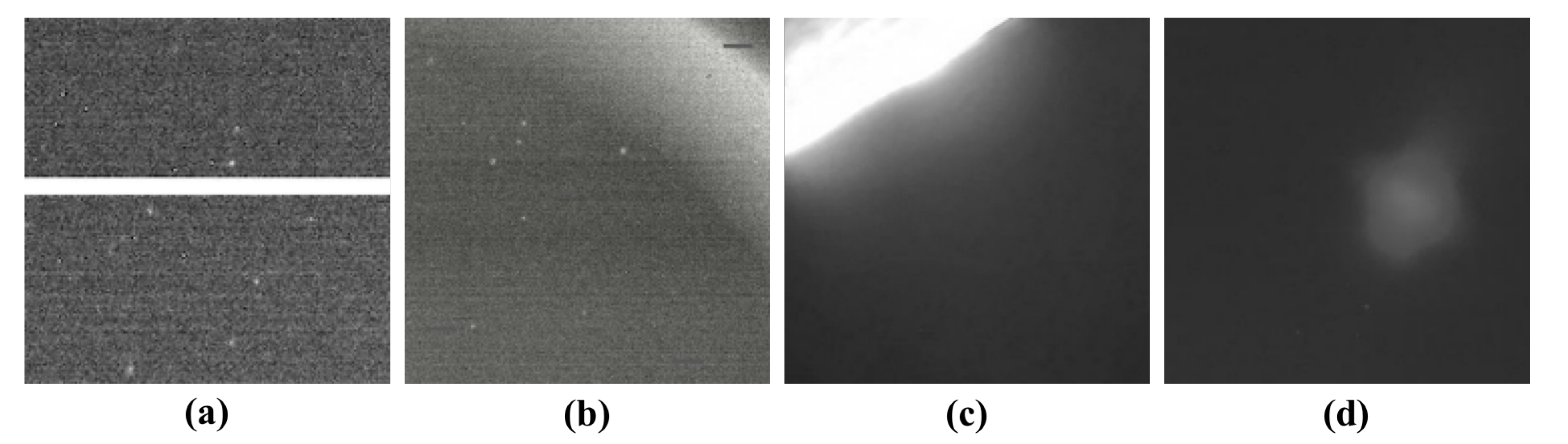
2.1. Description of Star Spot and Large-Area Interference
2.2. Luminance-Based Contrast Transformation
2.3. Simple Linear Iterative Clustering
- Initialize parameter K, which is the desired number of approximately equally sized superpixels.
- Move cluster centers to the lowest gradient position in a neighborhood.
- Calculate distance metric and assign the seed. The calculation of distance is as follows:where D is the combination distances; and are color distance and space distance, respectively. and are computed as described in Equation (5).
- Compute residual error and iterate to make the error less than the setting threshold.
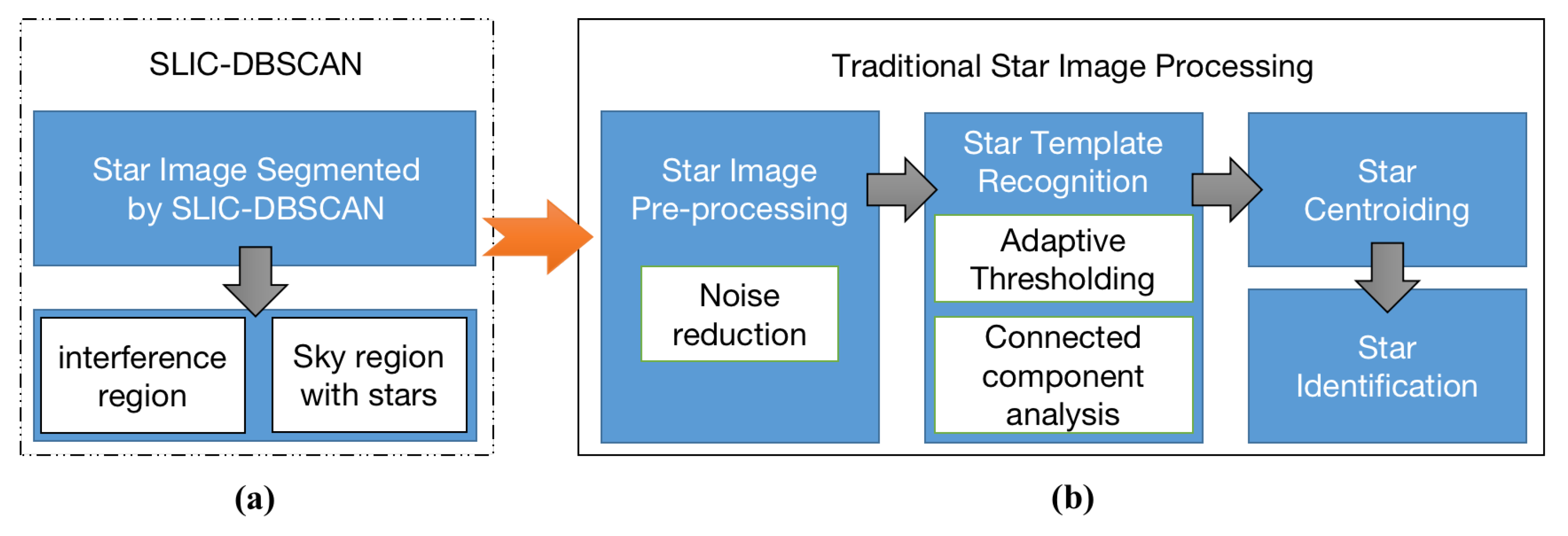
3. Extracting Sky Region
3.1. Restricted LC
3.2. Optimum Parameters in SLIC
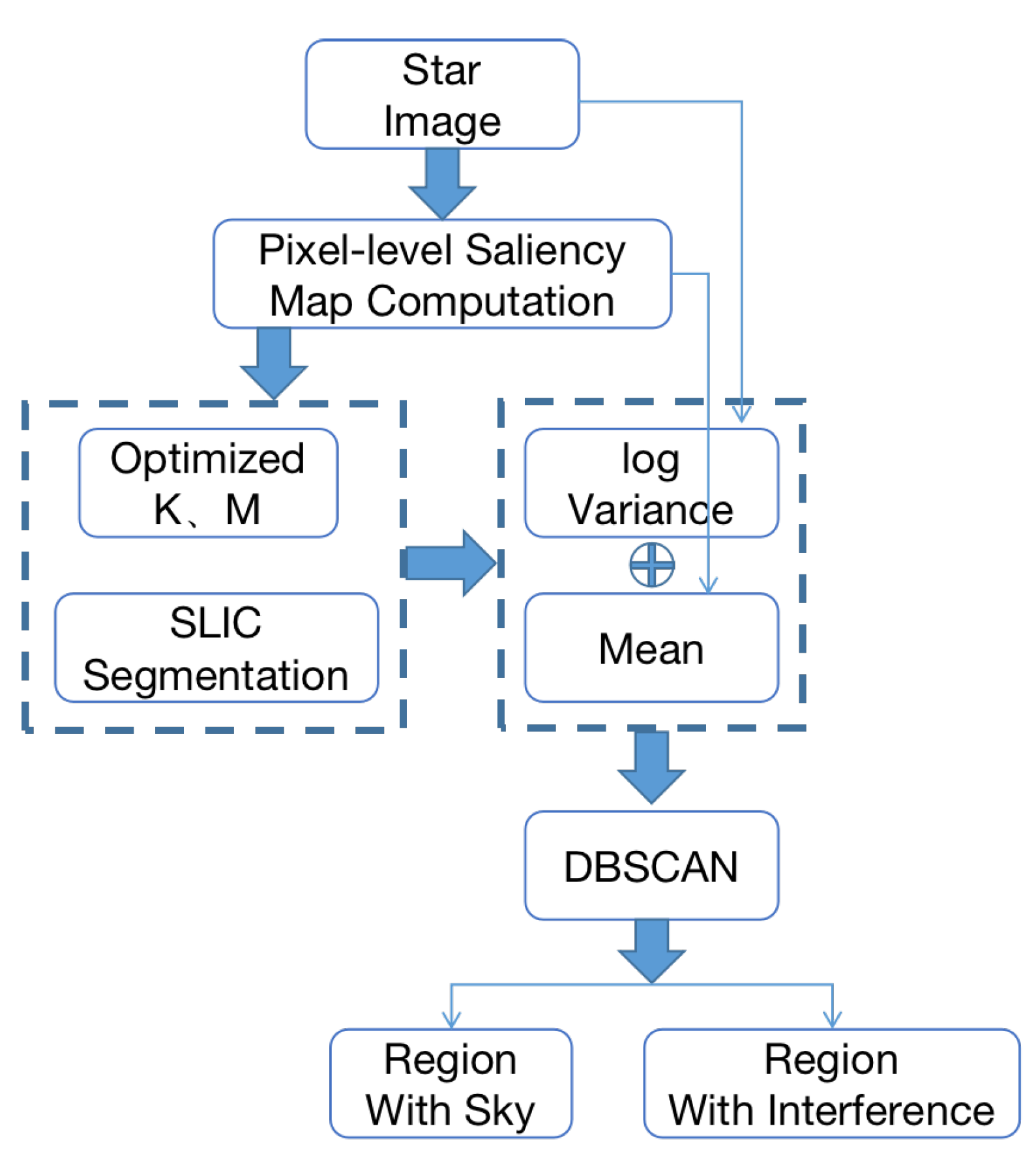
3.3. Extracting Features and DBSCAN
3.4. Complexity
3.5. Pseudocode
| Algorithm 1: Sky Region Extraction Using a SLIC-DBSCAN based algorithm. |
 |
4. Experiments and Results
4.1. Comparison with Different Clustering Algorithms
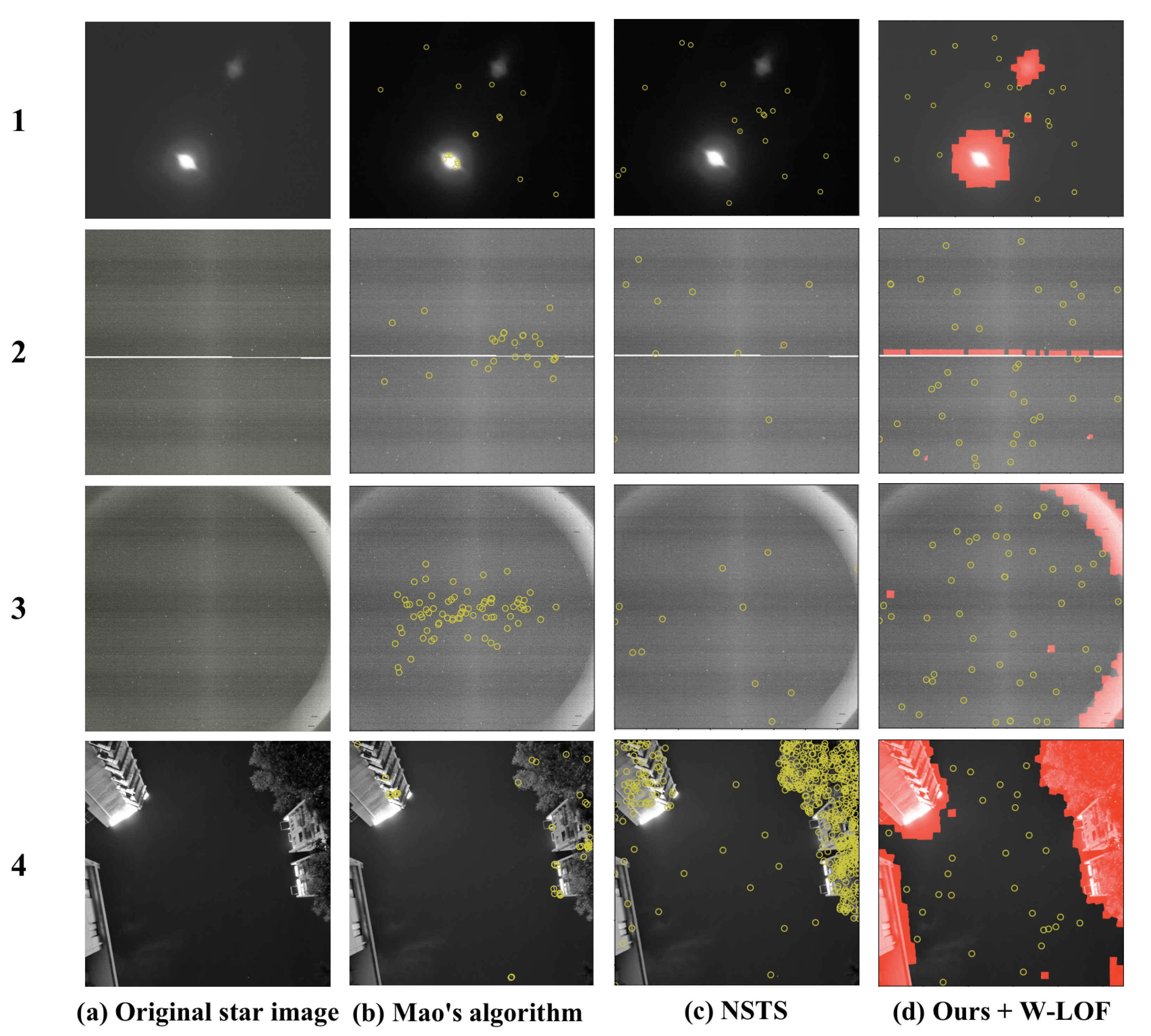
4.2. Comparison with Existing Stray Light Suppression Algorithms
4.2.1. Ratio of Available Stars to Extracted Stars
4.2.2. Probability of True Detection and Miss Detection
4.3. Star Image in the Real Night Sky Observation Experiments
4.4. Star Image from On-Orbit Satellites
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liebe, C.C. Star trackers for attitude determination. IEEE Aerosp. Electron. Syst. Mag. 1995, 10, 10–16. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.; Xing, F.; Wei, M.; Sun, T.; You, Z. Optimization method of star tracker orientation for sun-synchronous orbit based on space light distribution. Appl. Opt. 2017, 56, 4480–4490. [Google Scholar] [CrossRef] [PubMed]
- Fialho, M.A.A.; Mortari, D. Theoretical Limits of Star Sensor Accuracy. Sensors 2019, 19, 5355. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sarvi, M.N.; Abbasi-Moghadam, D.; Abolghasemi, M.; Hoseini, H. Design and implementation of a star-tracker for LEO satellite. Optik 2020, 208, 164343. [Google Scholar] [CrossRef]
- Marin, M.; Bang, H. Design and Simulation of a High-Speed Star Tracker for Direct Optical Feedback Control in ADCS. Sensors 2020, 20, 2388. [Google Scholar] [CrossRef] [Green Version]
- Wan, X.; Wang, G.; Wei, X.; Li, J.; Zhang, G. Star Centroiding Based on Fast Gaussian Fitting for Star Sensors. Sensors 2018, 18, 2836. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiang, J.; Lei, L.; Guangjun, Z. Robust and accurate star segmentation algorithm based on morphology. Opt. Eng. 2016, 55, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Fan, Q.; Cai, Z.; Wang, G. Plume Noise Suppression Algorithm for Missile-Borne Star Sensor Based on Star Point Shape and Angular Distance between Stars. Sensors 2019, 19, 3838. [Google Scholar] [CrossRef] [Green Version]
- Arbabmir, M.V.; Mohammadi, S.M.; Salahshour, S.; Somayehee, F. Improving night sky star image processing algorithm for star sensors. J. Opt. Soc. Am. A 2014, 31, 794–801. [Google Scholar] [CrossRef]
- Jorgensen, J.L.; Riis, T.; Betto, M. Star tracker and vision systems performance in a high radiation environment. In Proceedings of the 1999 IEEE Aerospace Conference. Proceedings (Cat. No.99TH8403), Snowmass, CO, USA, 7 March 1999; Volume 2, pp. 95–103. [Google Scholar] [CrossRef]
- Jerebets, S. Star tracker focal plane evaluation for the JIMO mission. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2006; Volume 2006, p. 6. [Google Scholar] [CrossRef] [Green Version]
- Hainaut, O.R.; Williams, A.P. Impact of satellite constellations on astronomical observations with ESO telescopes in the visible and infrared domains. Astron. Astrophys. 2020, 636, A121. [Google Scholar] [CrossRef] [Green Version]
- Salzberg, S.; Chandar, R.; Ford, H.; Murthy, S.K.; White, R. Decision Trees for Automated Identification of Cosmic-Ray Hits in Hubble Space Telescope Images. Publ. Astron. Soc. Pac. 1995, 107, 279. [Google Scholar] [CrossRef]
- Li, Y.M.; Li, C.J.; Zheng, R.; Li, X.; Yang, J. The research on image processing technology of the star tracker. In Proceedings of the International Symposium on Optoelectronic Technology and Application 2014: Image Processing and Pattern Recognition, Beijing, China, 24 November 2014; Volume 9301, p. 930103. [Google Scholar] [CrossRef]
- Windhorst, R.A.; Franklin, B.E.; Neuschaefer, L.W. Removing Cosmic-Ray Hits from Multi-Orbit HST Wide Field Camera Images. Publ. Astron. Soc. Pac. 1994, 106, 798. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Bloom, J.S. deepCR: Cosmic Ray Rejection with Deep Learning. Astrophys. J. 2020, 889, 24. [Google Scholar] [CrossRef]
- Murtagh, F.D. Cosmic Ray Discrimination on HST WF/PC Images: Object Recognition-By-Example. In Astronomical Data Analysis Software and Systems I; Worrall, D.M., Biemesderfer, C., Barnes, J., Eds.; Astronomical Society of the Pacific Conference Series; Elsevier: Amsterdam, The Netherlands, 1992; Volume 25, p. 265. [Google Scholar]
- Farage, C.L.; Pimbblet, K.A. Evaluation of Cosmic Ray Rejection Algorithms on Single-Shot Exposures. Publ. Astron. Soc. Aust. 2005, 22, 249–256. [Google Scholar] [CrossRef] [Green Version]
- Gössl, C.A.; Riffeser, A. Image reduction pipeline for the detection of variable sources in highly crowded fields. Astron. Astrophys. 2002, 381, 1095–1109. [Google Scholar] [CrossRef] [Green Version]
- Rhoads, J. Cosmic-Ray Rejection by Linear Filtering of Single Images. Publ. Astron. Soc. Pac. 2000, 112, 703–710. [Google Scholar] [CrossRef] [Green Version]
- Ipatov, S.; A’Hearn, M.; Klaasen, K. Automatic removal of cosmic ray signatures in Deep Impact images. Adv. Space Res. 2007, 40, 160–172. [Google Scholar] [CrossRef]
- Ko, B.C.; Nam, J.Y. Object-of-interest image segmentation based on human attention and semantic region clustering. J. Opt. Soc. Am. A 2006, 23, 2462–2470. [Google Scholar] [CrossRef] [PubMed]
- Achanta, R.; Hemami, S.; Estrada, F.; Susstrunk, S. Frequency-tuned salient region detection. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 1597–1604. [Google Scholar] [CrossRef] [Green Version]
- Desai, S.; Mohr, J.J.; Bertin, E.; Kümmel, M.; Wetzstein, M. Detection and removal of artifacts in astronomical images. Astron. Comput. 2016, 16, 67–78. [Google Scholar] [CrossRef] [Green Version]
- Shen, D.; Niu, Z.; Chen, Z. A New Space Radiation Suppression Algorithm for Space-Based Optical Image. In Proceedings of the 2017 4th International Conference on Information Science and Control Engineering (ICISCE), Changsha, China, 21–23 July 2017; pp. 65–68. [Google Scholar] [CrossRef]
- Nir, G.; Zackay, B.; Ofek, E.O. Optimal and Efficient Streak Detection in Astronomical Images. Astron. J. 2018, 156, 229. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.; Liu, D.; Yan, C.; Hu, C. Stray Light Elimination Method Based on Recursion Multi-Scale Gray-Scale Morphology for Wide-Field Surveillance. IEEE Access 2021, 9, 16928–16936. [Google Scholar] [CrossRef]
- Storkey, A.J.; Hambly, N.C.; Williams, C.K.I.; Mann, R.G. Cleaning sky survey data bases using Hough transform and renewal string approaches. Mon. Not. R. Astron. Soc. 2004, 347, 36–51. [Google Scholar] [CrossRef] [Green Version]
- Vandame, B. Fast Hough Transform for Robust Detection of Satellite Tracks. In Mining the Sky; ESO Astrophysics Symposia; Springer: Berlin/Heidelberg, Germany, 2001; p. 595. [Google Scholar] [CrossRef]
- Pych, W. A Fast Algorithm for Cosmic-Ray Removal from Single Images. Publ. Astron. Soc. Pac. 2004, 116, 148–153. [Google Scholar] [CrossRef]
- Gruen, D.; Seitz, S.; Bernstein, G.M. Implementation of Robust Image Artifact Removal in SWarp through Clipped Mean Stacking. Publ. Astron. Soc. Pac. 2014, 126, 158. [Google Scholar] [CrossRef] [Green Version]
- Van Dokkum, P.G. Cosmic-Ray Rejection by Laplacian Edge Detection. Publ. Astron. Soc. Pac. 2001, 113, 1420–1427. [Google Scholar] [CrossRef] [Green Version]
- Mao, X.; Liang, W.; Zheng, X. A parallel computing architecture based image processing algorithm for star sensor. J. Astronaut. 2011, 32, 613–619. [Google Scholar] [CrossRef]
- Wei, M.; Xing, F.; You, Z. A real-time detection and positioning method for small and weak targets using a 1D morphology-based approach in 2D images. Light Sci. Appl. 2018, 7, 18006. [Google Scholar] [CrossRef]
- Li, J.; Wei, X.; Zhang, G. An Extended Kalman Filter-Based Attitude Tracking Algorithm for Star Sensors. Sensors 2017, 17, 1921. [Google Scholar] [CrossRef] [Green Version]
- Itti, L.; Koch, C.; Niebur, E. A model of saliency-based visual attention for rapid scene analysis. IEEE Trans. Pattern Anal. Mach. Intell. 1998, 20, 1254–1259. [Google Scholar] [CrossRef] [Green Version]
- Gupta, A.K.; Seal, A.; Prasad, M.; Khanna, P. Salient Object Detection Techniques in Computer Vision—A Survey. Entropy 2020, 22, 1174. [Google Scholar] [CrossRef]
- Sun, T.; Xing, F.; Bao, J.; Ji, S.; Li, J. Suppression of stray light based on energy information mining. Appl. Opt. 2018, 57, 9239–9245. [Google Scholar] [CrossRef] [PubMed]
- Sun, T.; Xing, F.; You, Z.; Wang, X.; Li, B. Smearing model and restoration of star image under conditions of variable angular velocity and long exposure time. Opt. Express 2014, 22, 6009–6024. [Google Scholar] [CrossRef] [PubMed]
- Zhai, Y.; Shah, M. Visual Attention Detection in Video Sequences Using Spatiotemporal Cues. In Proceedings of the Association for Computing Machinery (MM ’06), Santa Barbara, CA, USA, 23 October 2006; pp. 815–824. [Google Scholar] [CrossRef]
- Cheng, M.; Zhang, G.; Mitra, N.J.; Huang, X.; Hu, S. Global contrast based salient region detection. In Proceedings of the CVPR 2011, Colorado Springs, CO, USA, 20–25 June 2011; pp. 409–416. [Google Scholar] [CrossRef] [Green Version]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Süsstrunk, S. SLIC Superpixels Compared to State-of-the-Art Superpixel Methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef] [Green Version]
- Levinshtein, A.; Stere, A.; Kutulakos, K.N.; Fleet, D.J.; Dickinson, S.J.; Siddiqi, K. TurboPixels: Fast Superpixels Using Geometric Flows. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 2290–2297. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yildirim, G.; Shaji, A.; Susstrunk, S. Saliency Detection using regression trees on hierarchical image segments. In Proceedings of the 2014 IEEE International Conference on Image Processing (ICIP), Paris, France, 27–30 October 2014. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xiaowei, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise; AAAI Press: New Orleans, LA, USA, 1996. [Google Scholar]
- Chaudhuri, D.; Chaudhuri, B. A novel multiseed nonhierarchical data clustering technique. IEEE Trans. Syst. Man Cybern. Part B Cybern. 1997, 27, 871–876. [Google Scholar] [CrossRef] [PubMed]
- Liu, F.T.; Ting, K.M.; Zhou, Z.H. Isolation Forest. In Proceedings of the 2008 Eighth IEEE International Conference on Data Mining, Pisa, Italy, 15–19 December 2008; pp. 413–422. [Google Scholar] [CrossRef]
- Cheng, Y. Mean shift, mode seeking, and clustering. IEEE Trans. Pattern Anal. Mach. Intell. 1995, 17, 790–799. [Google Scholar] [CrossRef] [Green Version]
- Sun, X.; Zhang, R.; Shi, C.; Lin, X. Star Identification Algorithm Based-on Dynamic Angle Matching. Acta Opt. Sin. 2021, 19, 1–12. [Google Scholar]




















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, C.; Zhang, R.; Yu, Y.; Sun, X.; Lin, X. A SLIC-DBSCAN Based Algorithm for Extracting Effective Sky Region from a Single Star Image. Sensors 2021, 21, 5786. https://doi.org/10.3390/s21175786
Shi C, Zhang R, Yu Y, Sun X, Lin X. A SLIC-DBSCAN Based Algorithm for Extracting Effective Sky Region from a Single Star Image. Sensors. 2021; 21(17):5786. https://doi.org/10.3390/s21175786
Chicago/Turabian StyleShi, Chenguang, Rui Zhang, Yong Yu, Xingzhe Sun, and Xiaodong Lin. 2021. "A SLIC-DBSCAN Based Algorithm for Extracting Effective Sky Region from a Single Star Image" Sensors 21, no. 17: 5786. https://doi.org/10.3390/s21175786
APA StyleShi, C., Zhang, R., Yu, Y., Sun, X., & Lin, X. (2021). A SLIC-DBSCAN Based Algorithm for Extracting Effective Sky Region from a Single Star Image. Sensors, 21(17), 5786. https://doi.org/10.3390/s21175786