
Deep Recursive Bayesian Tracking for Fully Automatic Centerline Extraction of Coronary Arteries in CT Images


Abstract
:1. Introduction
- The region of the coronary artery is thin across a long path.
- The voxels have significantly different intensities compared to the neighboring background.
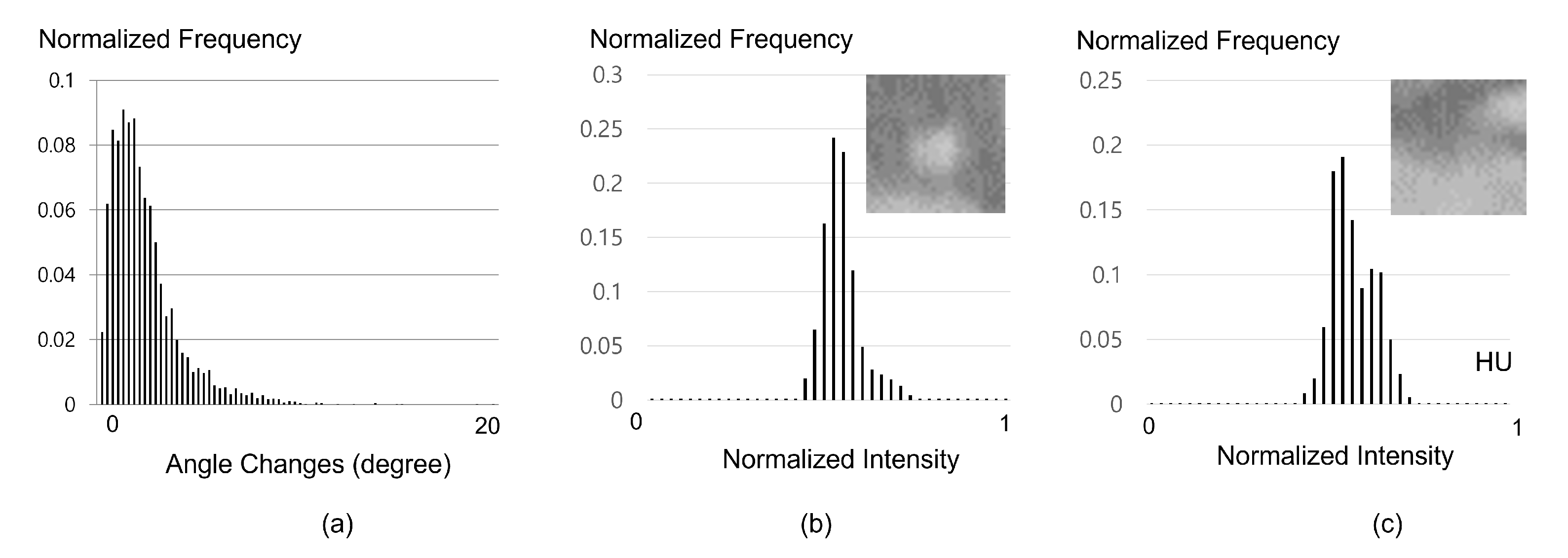
- The cross-sectional profile—the intensity values transverse to the main direction—follow a specific distribution.
- The variation in color along the main direction is smooth.
- Coronary arteries have local curvatures; for instance, some parts may be mostly straight, other parts can admit soft bends, and other parts may be highly tortuous.
- Coronary arteries have bifurcation sites that are defined as three-branch joints.
2. Methods
2.1. Tracking Scheme
2.2. Likelihood Approximator
2.3. Transition Prior
2.4. Majority-Minority (M&m) System for Bifurcation Detection
2.5. Stopping Criterion
3. Experiment and Result
3.1. Training Patch-Based CNN
3.2. Initialization and Parameters
3.3. Evaluation on a CCTA Database
- OV: Total overlap, .
- OT: OV of the extracted centerline with the clinically relevant part of the vessel (radius ≥ 1.5 mm), which indicates how well the method is able to track the section of the vessel that is assumed to be clinically relevant. Vessel segments with a diameter of 1.5 mm or larger are assumed to be clinically relevant [31,32].
- AI: The average inside accuracy metric (AI) measures the average distance between the reference, , and extracted centerline for automatically extracted points that are within the radius of the reference centerline.
4. Evaluation and Results
5. Discussion
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lesage, D.; Angelini, E.D.; Bloch, I.; Funka-Lea, G. A review of 3D vessel lumen segmentation techniques: Models, features and extraction schemes. Med. Image Anal. 2009, 13, 819–845. [Google Scholar] [CrossRef] [PubMed]
- Bibiloni, P.; González-Hidalgo, M.; Massanet, S. A survey on curvilinear object segmentation in multiple applications. Pattern Recognit. 2016, 60, 949–970. [Google Scholar] [CrossRef]
- Lorenz, C.; Renisch, S.; Schlathoelter, T.; Buelow, T. Simultaneous segmentation and tree reconstruction of the coronary arteries in MSCT images. In Medical Imaging 2003: Physiology and Function: Methods, Systems, and Applications; International Society for Optics and Photonics: Bellingham, WA, USA, 2003; Volume 5031, pp. 167–177. [Google Scholar]
- Lorigo, L.M.; Faugeras, O.D.; Grimson, W.E.L.; Keriven, R.; Kikinis, R.; Nabavi, A.; Westin, C.F. Curves: Curve evolution for vessel segmentation. Med. Image Anal. 2001, 5, 195–206. [Google Scholar] [CrossRef]
- Wink, O.; Niessen, W.J.; Viergever, M.A. Minimum cost path determination using a simple heuristic function. In Proceedings of the 15th International Conference on Pattern Recognition (ICPR-2000), Barcelona, Spain, 3–7 September 2000; Volume 3, pp. 998–1001. [Google Scholar]
- Olabarriaga, S.D.; Breeuwer, M.; Niessen, W.J. Minimum cost path algorithm for coronary artery central axis tracking in CT images. In International Conference on Medical Image Computing and Computer-Assisted Intervention; Springer: Berlin/Heidelberg, Germany, 2003; pp. 687–694. [Google Scholar]
- Wink, O.; Niessen, W.J.; Viergever, M.A. Multiscale vessel tracking. IEEE Trans. Med. Imaging 2004, 23, 130–133. [Google Scholar] [CrossRef]
- Shim, H.; Kwon, D.; Yun, I.D.; Lee, S.U. Robust segmentation of cerebral arterial segments by a sequential Monte Carlo method: Particle filtering. Comput. Methods Programs Biomed. 2006, 84, 135–145. [Google Scholar] [CrossRef]
- Lesage, D.; Angelini, E.D.; Bloch, I.; Funka-Lea, G. Medial-based Bayesian tracking for vascular segmentation: Application to coronary arteries in 3D CT angiography. In Proceedings of the 2008 5th IEEE International Symposium on Biomedical Imaging: From Nano to Macro, Paris, France, 14–17 May 2008; pp. 268–271. [Google Scholar]
- Lesage, D.; Angelini, E.D.; Funka-Lea, G.; Bloch, I. Adaptive particle filtering for coronary artery segmentation from 3D CT angiograms. Comput. Vis. Image Underst. 2016, 151, 29–46. [Google Scholar] [CrossRef]
- Kalaie, S.; Gooya, A. Vascular tree tracking and bifurcation points detection in retinal images using a hierarchical probabilistic model. Comput. Methods Programs Biomed. 2017, 151, 139–149. [Google Scholar] [CrossRef] [Green Version]
- Jeon, B.; Jang, Y.; Shim, H.; Chang, H.J. Identification of coronary arteries in CT images by Bayesian analysis of geometric relations among anatomical landmarks. Pattern Recognit. 2019, 96, 106958. [Google Scholar] [CrossRef]
- Uslu, F.; Bharath, A.A. A recursive Bayesian approach to describe retinal vasculature geometry. Pattern Recognit. 2019, 87, 157–169. [Google Scholar] [CrossRef] [Green Version]
- Litjens, G.; Kooi, T.; Bejnordi, B.E.; Setio, A.A.A.; Ciompi, F.; Ghafoorian, M.; Van Der Laak, J.A.; Van Ginneken, B.; Sánchez, C.I. A survey on deep learning in medical image analysis. Med. Image Anal. 2017, 42, 60–88. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.; Jang, Y.; Jeon, B.; Hong, Y.; Shim, H.; Chang, H. Fully Automatic Segmentation of Coronary Arteries Based on Deep Neural Network in Intravascular Ultrasound Images. In Intravascular Imaging and Computer Assisted Stenting and Large-Scale Annotation of Biomedical Data and Expert Label Synthesis; Springer: Berlin/Heidelberg, Germany, 2018; pp. 161–168. [Google Scholar]
- Wolterink, J.M.; van Hamersvelt, R.W.; Viergever, M.A.; Leiner, T.; Išgum, I. Coronary artery centerline extraction in cardiac CT angiography using a CNN-based orientation classifier. Med. Image Anal. 2019, 51, 46–60. [Google Scholar] [CrossRef] [Green Version]
- Jung, S.; Lee, S.; Jeon, B.; Jang, Y.; Chang, H.J. Deep learning cross-phase style transfer for motion artifact correction in coronary computed tomography angiography. IEEE Access 2020, 8, 81849–81863. [Google Scholar] [CrossRef]
- Zhang, Y.; Luo, G.; Wang, W.; Wang, K. Branch-aware double DQN for centerline extraction in coronary CT angiography. In International Conference on Medical Image Computing and Computer-Assisted Intervention; Springer: Berlin/Heidelberg, Germany, 2020; pp. 35–44. [Google Scholar]
- Salahuddin, Z.; Lenga, M.; Nickisch, H. Multi-resolution 3d convolutional neural networks for automatic coronary centerline extraction in cardiac CT angiography scans. In Proceedings of the 2021 IEEE 18th International Symposium on Biomedical Imaging (ISBI), Nice, France, 13–16 April 2021; pp. 91–95. [Google Scholar]
- Kong, B.; Wang, X.; Bai, J.; Lu, Y.; Gao, F.; Cao, K.; Xia, J.; Song, Q.; Yin, Y. Learning tree-structured representation for 3D coronary artery segmentation. Comput. Med. Imaging Graph. 2020, 80, 101688. [Google Scholar] [CrossRef] [PubMed]
- Chen, F.; Wei, C.; Ren, S.; Zhou, Z.; Xu, L.; Liang, J. Coronary Artery Lumen Segmentation in CCTA Using 3D CNN with Partial Annotations. In Proceedings of the 2021 IEEE 18th International Symposium on Biomedical Imaging (ISBI), Nice, France, 13–16 April 2021; pp. 1107–1111. [Google Scholar]
- Doucet, A.; De Freitas, N.; Gordon, N. An introduction to sequential Monte Carlo methods. In Sequential Monte Carlo Methods in Practice; Springer: Berlin/Heidelberg, Germany, 2001; pp. 3–14. [Google Scholar]
- McPheeters, G.W.C.; Wyvill, B. Data structure for soft objects. Vis. Comput. 1986, 2, 227–234. [Google Scholar]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. KDD 1996, 96, 226–231. [Google Scholar]
- INFINITT. Available online: https://www.infinitt.com/ (accessed on 7 September 2021).
- Vital. Available online: https://www.vitalimages.com/ (accessed on 7 September 2021).
- Medis. Available online: https://www.medis.nl/ (accessed on 7 September 2021).
- Han, D.; Shim, H.; Jeon, B.; Jang, Y.; Hong, Y.; Jung, S.; Ha, S.; Chang, H.J. Automatic coronary artery segmentation using active search for branches and seemingly disconnected vessel segments from coronary CT angiography. PLoS ONE 2016, 11, e0156837. [Google Scholar] [CrossRef] [PubMed]
- Schaap, M.; Metz, C.T.; van Walsum, T.; van der Giessen, A.G.; Weustink, A.C.; Mollet, N.R.; Bauer, C.; Bogunović, H.; Castro, C.; Deng, X.; et al. Standardized evaluation methodology and reference database for evaluating coronary artery centerline extraction algorithms. Med. Image Anal. 2009, 13, 701–714. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jeon, B.; Hong, Y.; Han, D.; Jang, Y.; Jung, S.; Hong, Y.; Ha, S.; Shim, H.; Chang, H.J. Maximum a posteriori estimation method for aorta localization and coronary seed identification. Pattern Recognit. 2017, 68, 222–232. [Google Scholar] [CrossRef]
- Leschka, S.; Alkadhi, H.; Plass, A.; Desbiolles, L.; Grünenfelder, J.; Marincek, B.; Wildermuth, S. Accuracy of MSCT coronary angiography with 64-slice technology: First experience. Eur. Heart J. 2005, 26, 1482–1487. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ropers, D.; Rixe, J.; Anders, K.; Küttner, A.; Baum, U.; Bautz, W.; Daniel, W.G.; Achenbach, S. Usefulness of multidetector row spiral computed tomography with 64 × 0.6-mm collimation and 330-ms rotation for the noninvasive detection of significant coronary artery stenoses. Am. J. Cardiol. 2006, 97, 343–348. [Google Scholar] [CrossRef]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Rusu, A.A.; Veness, J.; Bellemare, M.G.; Graves, A.; Riedmiller, M.; Fidjeland, A.K.; Ostrovski, G.; et al. Human-level control through deep reinforcement learning. Nature 2015, 518, 529. [Google Scholar] [CrossRef] [PubMed]
- Ghesu, F.C.; Georgescu, B.; Zheng, Y.; Grbic, S.; Maier, A.; Hornegger, J.; Comaniciu, D. Multi-scale deep reinforcement learning for real-time 3D-landmark detection in CT scans. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 41, 176–189. [Google Scholar] [CrossRef] [PubMed]
- Zhang, P.; Wang, F.; Zheng, Y. Deep reinforcement learning for vessel centerline tracing in multi-modality 3D volumes. In International Conference on Medical Image Computing and Computer-Assisted Intervention; Springer: Berlin/Heidelberg, Germany, 2018; pp. 755–763. [Google Scholar]
- Zhou, S.K.; Le, H.N.; Luu, K.; Nguyen, H.V.; Ayache, N. Deep reinforcement learning in medical imaging: A literature review. arXiv 2021, arXiv:2103.05115. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Image Details and Measures | ||||
|---|---|---|---|---|---|
| Image Quality | Calcium Score | OV | OT | AI | |
| 0 | Moderate | Moderate | 0.93 | 0.93 | 0.27 |
| 1 | Moderate | Moderate | 0.93 | 0.94 | 0.49 |
| 2 | Good | Low | 0.92 | 0.87 | 0.34 |
| 3 | Poor | Moderate | 0.90 | 0.92 | 0.48 |
| 4 | Moderate | Low | 0.97 | 0.98 | 0.31 |
| 5 | Poor | Moderate | 0.89 | 0.89 | 0.29 |
| 6 | Good | Low | 0.95 | 0.97 | 0.47 |
| 7 | Good | Severe | 0.83 | 0.85 | 0.38 |
| Average | 0.92 | 0.93 | 0.36 | ||
| Solver | |||||||
|---|---|---|---|---|---|---|---|
| QAngioCT [27] | Xelis [25] | Vitrea [26] | AS [28] | AAPF [10] | Deep-PF | ||
| Measure | OV | 0.86 | 0.78 | 0.86 | 0.84 | 0.86 | 0.92 |
| OT | 0.88 | 0.80 | 0.89 | 0.88 | 0.92 | 0.93 | |
| AI | 0.36 | - | - | - | 0.25 | 0.36 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeon, B. Deep Recursive Bayesian Tracking for Fully Automatic Centerline Extraction of Coronary Arteries in CT Images. Sensors 2021, 21, 6087. https://doi.org/10.3390/s21186087
Jeon B. Deep Recursive Bayesian Tracking for Fully Automatic Centerline Extraction of Coronary Arteries in CT Images. Sensors. 2021; 21(18):6087. https://doi.org/10.3390/s21186087
Chicago/Turabian StyleJeon, Byunghwan. 2021. "Deep Recursive Bayesian Tracking for Fully Automatic Centerline Extraction of Coronary Arteries in CT Images" Sensors 21, no. 18: 6087. https://doi.org/10.3390/s21186087
APA StyleJeon, B. (2021). Deep Recursive Bayesian Tracking for Fully Automatic Centerline Extraction of Coronary Arteries in CT Images. Sensors, 21(18), 6087. https://doi.org/10.3390/s21186087