
Estimation and Error Analysis for Optomechanical Inertial Sensors


Abstract
:1. Introduction
2. Mathematical Formulation and Estimation Methods
2.1. Sensor Model
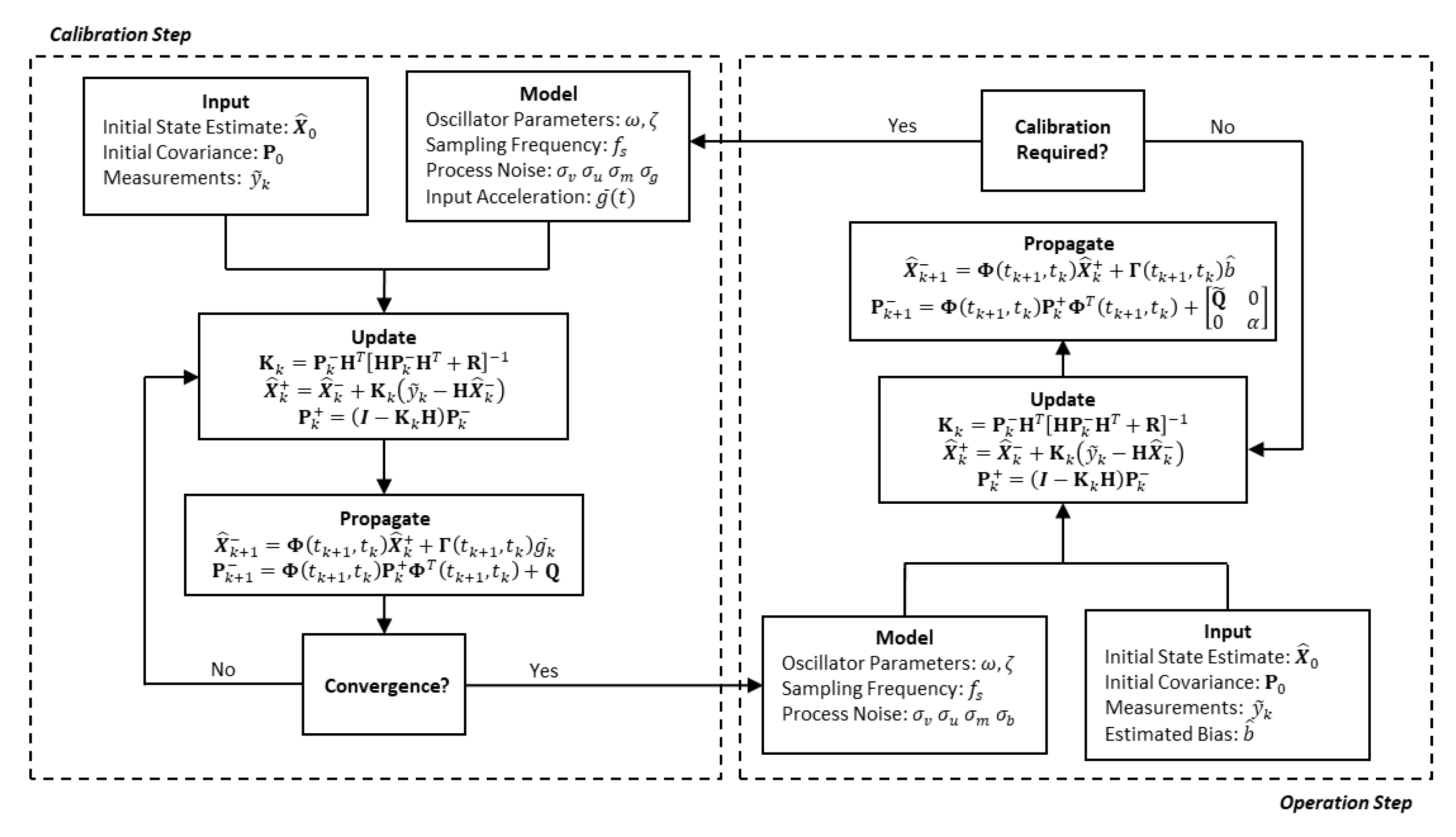
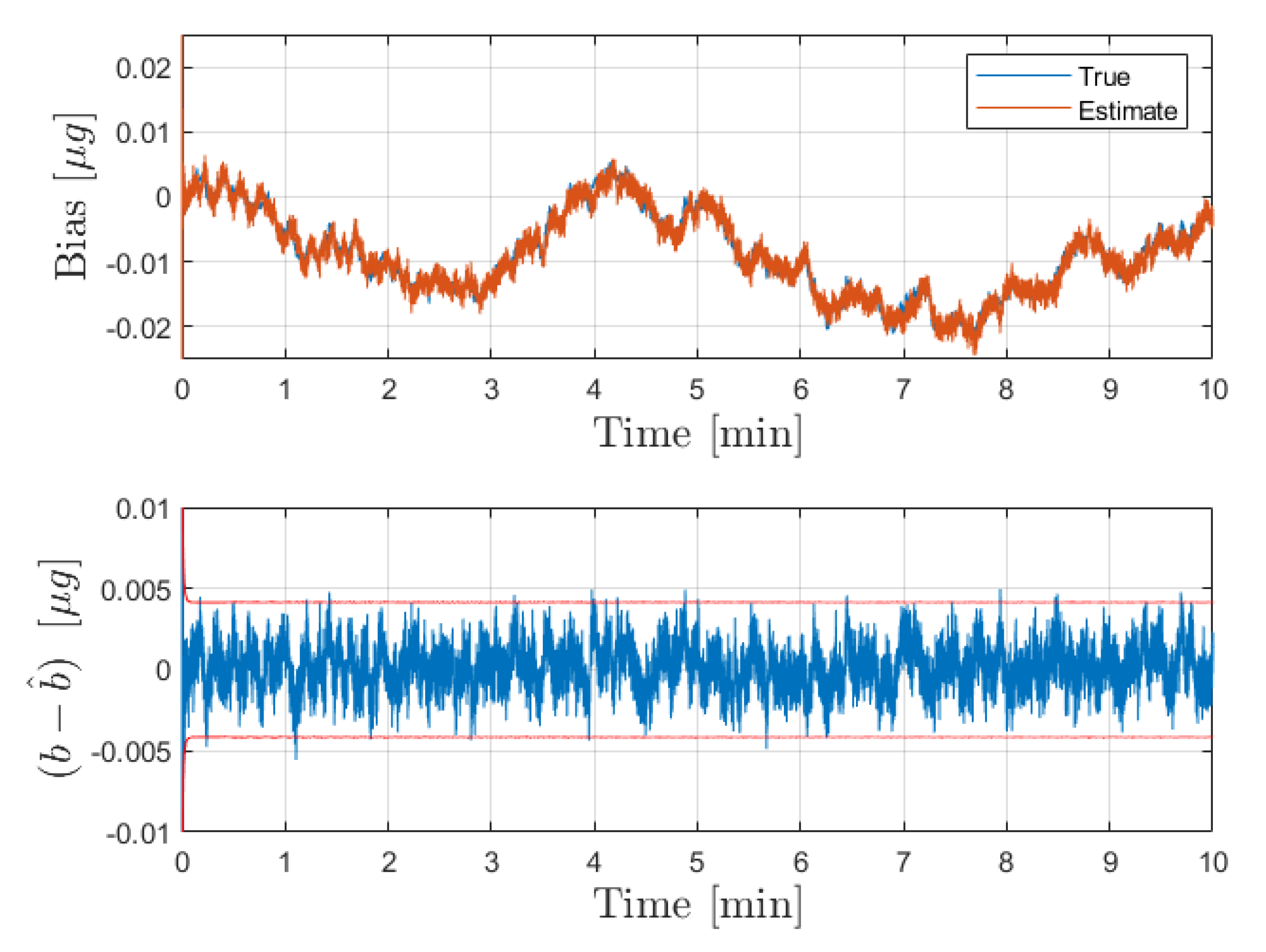
2.2. Calibration Phase: Estimating the Sensor Bias
2.3. Operation Phase: Estimating the Forcing Acceleration
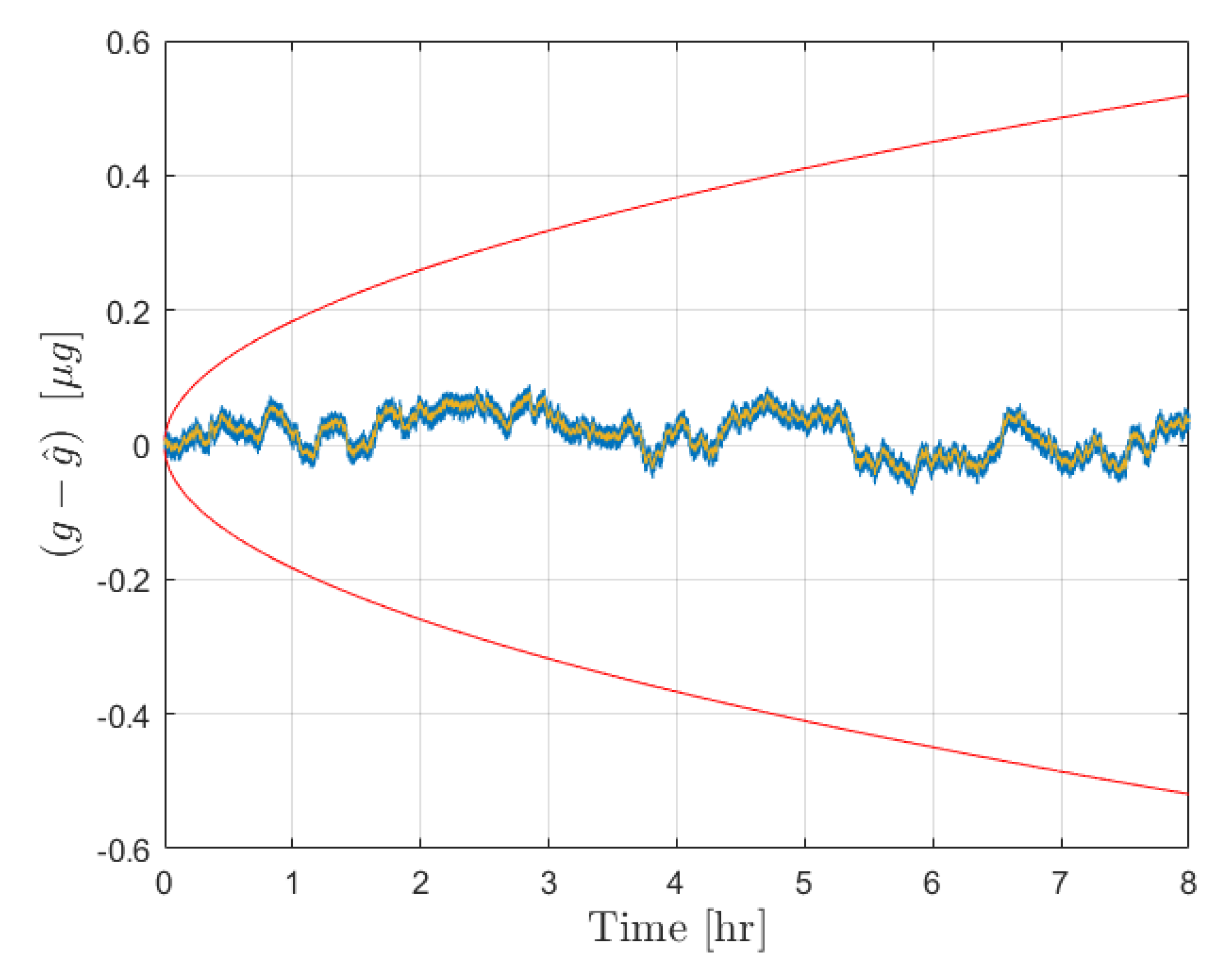
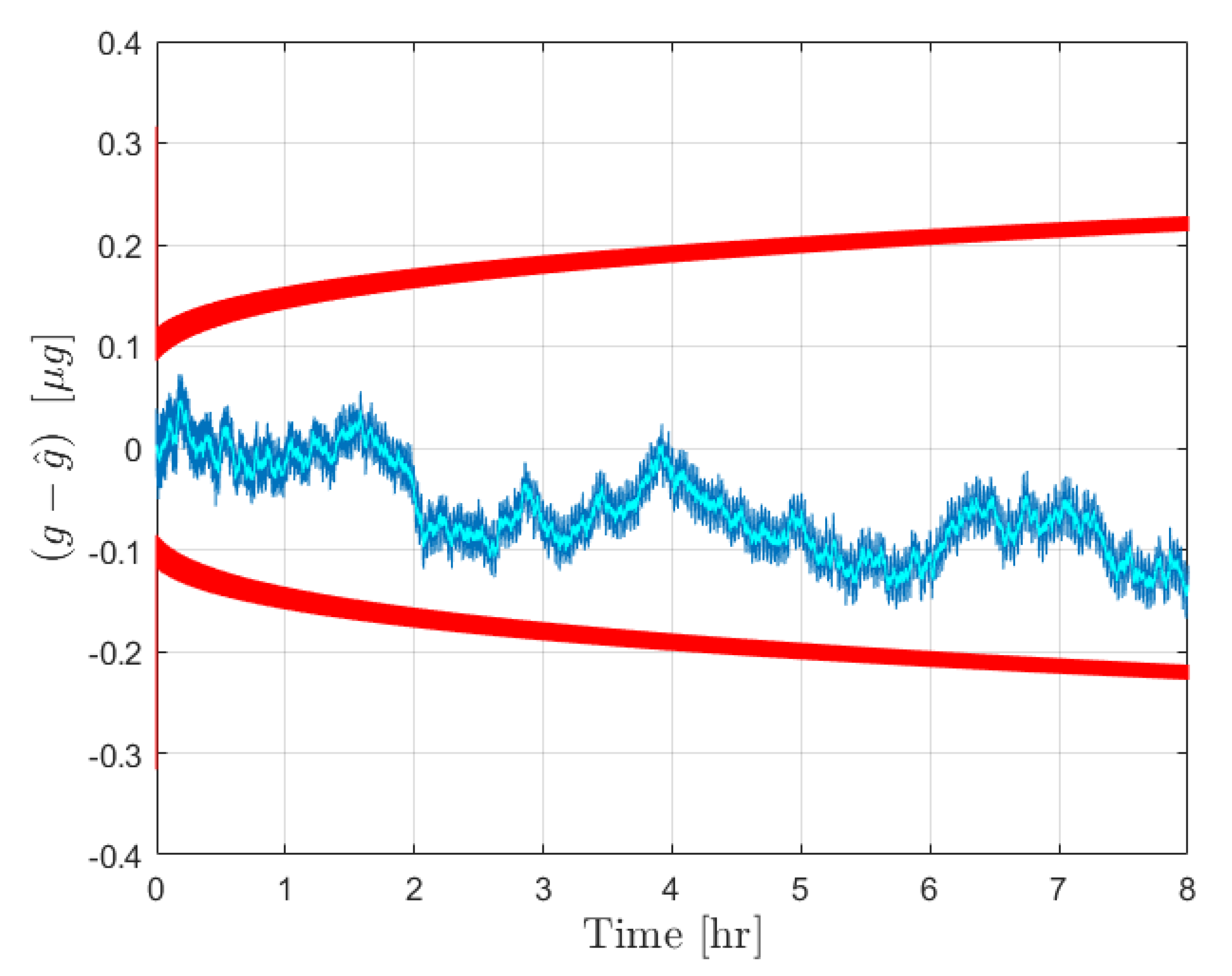
2.3.1. Least Squares Formulation
2.3.2. Kalman Filter Formulation
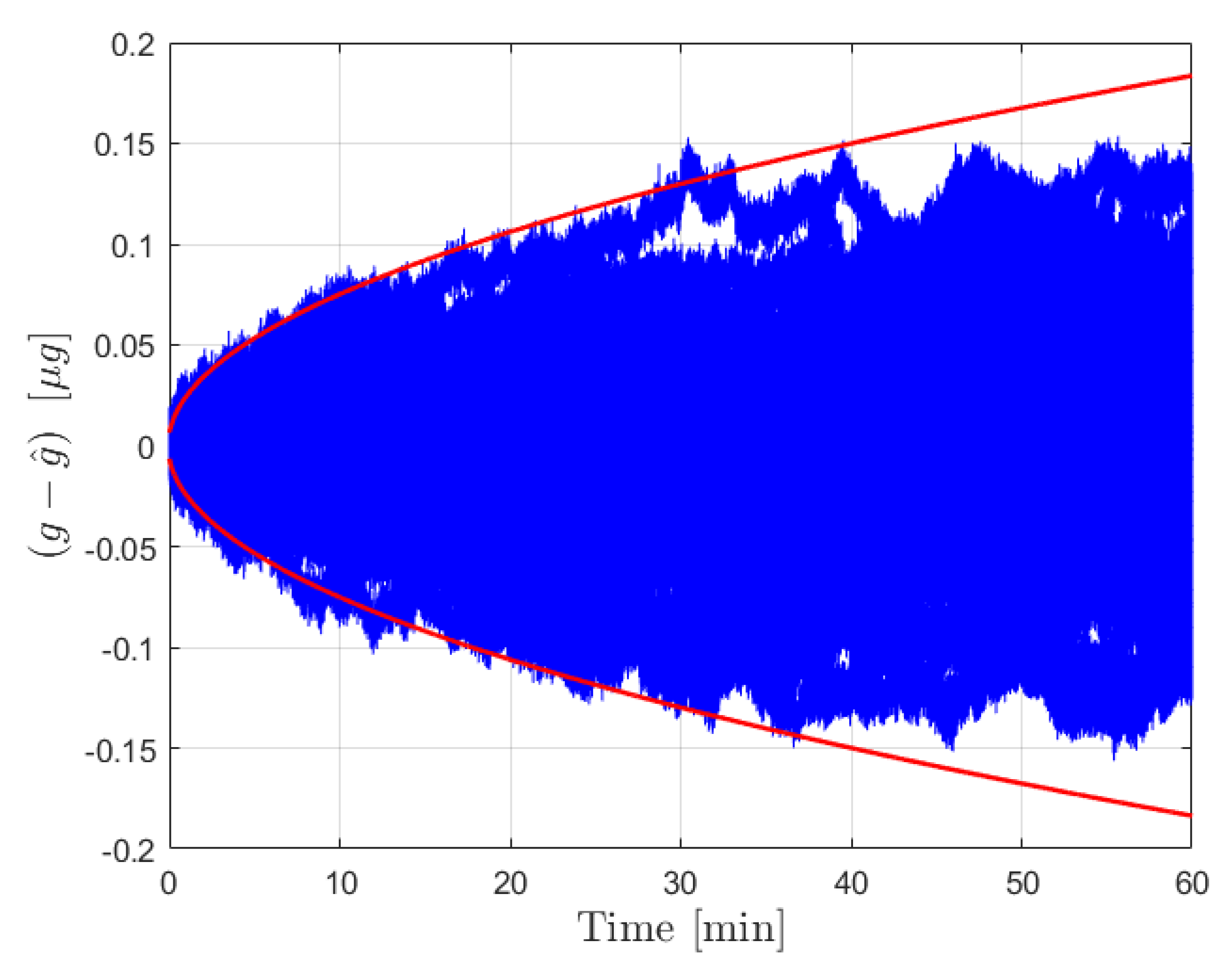
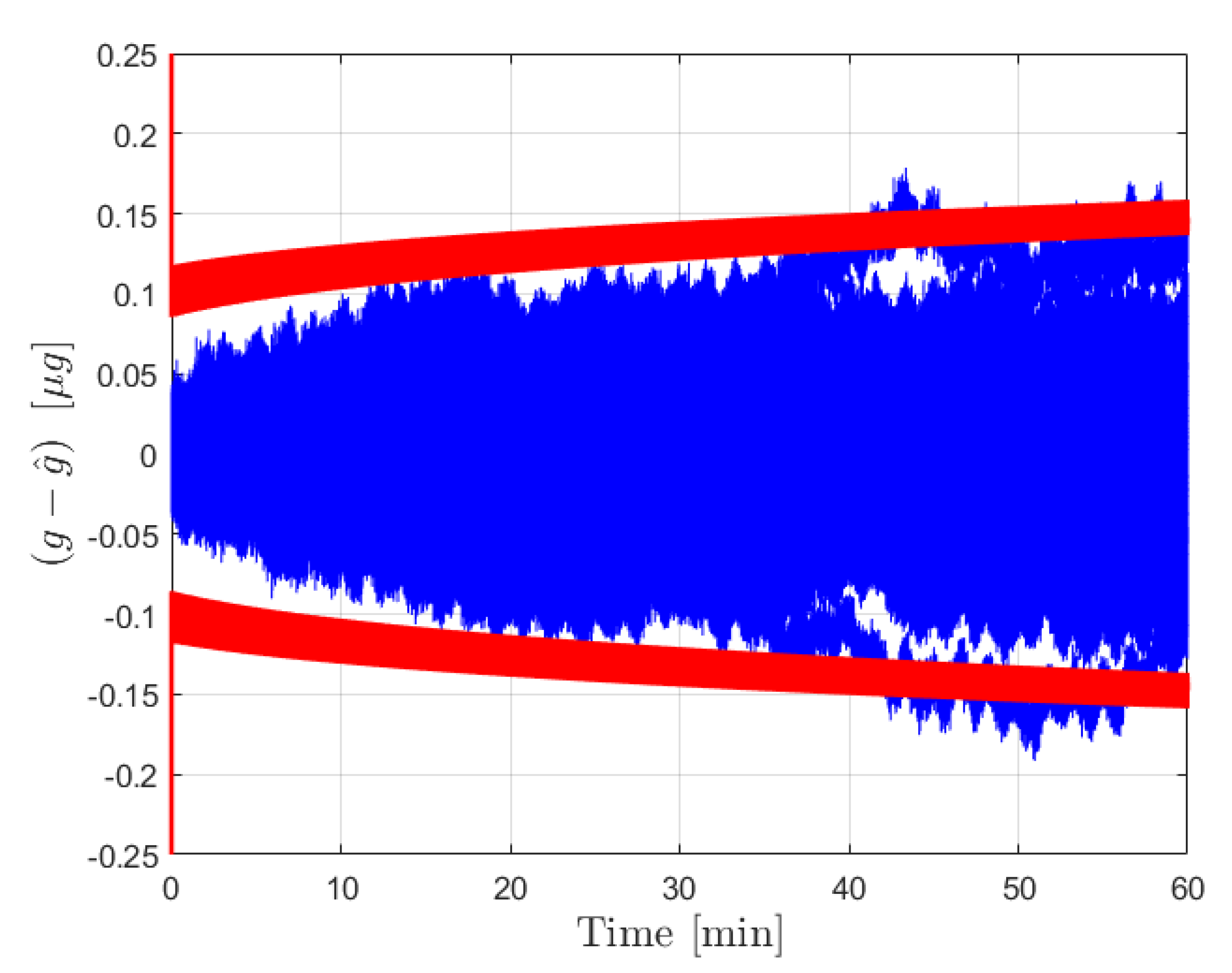
3. Numerical Simulation Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. State Transition Matrix
Appendix B. Process Noise Covariance
References
- Zanetti, R.; Holt, G.; Gay, R.; D’Souza, C.; Sud, J.; Mamich, H.; Begley, M.; King, E.; Clark, F.D. Absolute Navigation Performance of the Orion Exploration Flight Test 1. J. Guid. Control Dyn. 2017, 40, 1106–1116. [Google Scholar] [CrossRef]
- Verras, A.; Eapen, R.T.; Simon, A.B.; Majji, M.; Bhaskara, R.R.; Restrepo, C.I.; Lovelace, R. Vision and Inertial Sensor Fusion for Terrain Relative Navigation. In Proceedings of the AIAA Scitech 2021 Forum, 19–21 January 2021. [Google Scholar]
- Demcak, S.; Young, B.; Graat, E.; Beswick, R.; Criddle, K.; Ionasescu, R.; Hughes, R.S.; Lee, J.; Haggard, M.; Sealy, N.; et al. Navigation Design and Operations of MAVEN Aerobraking. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 0471. [Google Scholar]
- Jah, M.K.; Lisano, M.E.; Born, G.H.; Axelrad, P. Mars Aerobraking Spacecraft State Estimation by Processing Inertial Measurement Unit Data. J. Guid. Control Dyn. 2008, 31, 1802–1812. [Google Scholar] [CrossRef] [Green Version]
- Zurek, R.; Tolson, R.; Bougher, S.; Lugo, R.; Baird, D.; Bell, J.; Jakosky, B. Mars Thermosphere as Seen in MAVEN Accelerometer Data. J. Geophys. Res. Space Phys. 2017, 122, 3798–3814. [Google Scholar] [CrossRef]
- Christophe, B.; Foulon, B.; Liorzou, F.; Lebat, V.; Boulanger, D.; Huynh, P.A.; Zahzam, N.; Bidel, Y.; Bresson, A. Status of Development of the Future Accelerometers for Next Generation Gravity Missions. In International Symposium on Advancing Geodesy in a Changing World; Springer: Cham, Switzerland, 2019; pp. 85–89. [Google Scholar]
- Christophe, B.; Boulanger, D.; Foulon, B.; Huynh, P.A.; Lebat, V.; Liorzou, F.; Perrot, E. A new generation of ultra-sensitive electrostatic accelerometers for GRACE follow-on and towards the next generation gravity missions. Acta Astronaut. 2015, 117, 1–7. [Google Scholar] [CrossRef]
- Peron, R.; Lorenzini, E.C. METRIC: A Dedicated Earth-Orbiting Spacecraft for Investigating Gravitational Physics and the Space Environment. Aerospace 2017, 4, 38. [Google Scholar] [CrossRef] [Green Version]
- Antonucci, F.; Armano, M.; Audley, H.; Auger, G.; Benedetti, M.; Binetruy, P.; Boatella, C.; Bogenstahl, J.; Bortoluzzi, D.; Bosetti, P.; et al. LISA Pathfinder: Mission and status. Class. Quantum Gravity 2011, 28, 094001. [Google Scholar] [CrossRef]
- Middlemiss, R.; Samarelli, A.; Paul, D.; Hough, J.; Rowan, S.; Hammond, G. Measurement of the Earth tides with a MEMS gravimeter. Nature 2016, 531, 614–617. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bai, Y.; Li, Z.; Hu, M.; Liu, L.; Qu, S.; Tan, D.; Tu, H.; Wu, S.; Yin, H.; Li, H.; et al. Research and Development of Electrostatic Accelerometers for Space Science Missions at HUST. Sensors 2017, 17, 1943. [Google Scholar] [CrossRef] [PubMed]
- El-Sheimy, N.; Youssef, A. Inertial sensors technologies for navigation applications: State of the art and future trends. Satell. Navig. 2020, 1, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Guzmán, F.; Kumanchik, L.M.; Taylor, J.M.; Pratt, J.R. Optomechanial Gravimeter. U.S. Patent 10,545,259B2, 28 December 2017. [Google Scholar]
- Taylor, J.R. Classical Mechanics; University Science Books: Sausalito, CA, USA, 2005. [Google Scholar]
- Guzmán Cervantes, F.; Kumanchik, L.; Pratt, J.; Taylor, J.M. High sensitivity optomechanical reference accelerometer over 10 kHz. Appl. Phys. Lett. 2014, 104, 221111. [Google Scholar] [CrossRef] [Green Version]
- Hines, A.; Richardson, L.; Wisniewski, H.; Guzmán, F. Optomechanical inertial sensors. Appl. Opt. 2020, 59, G167–G174. [Google Scholar] [CrossRef]
- Wisniewski, H.; Richardson, L.; Hines, A.; Laurain, A.; Guzmán, F. Optomechanical lasers for inertial sensing. J. Opt. Soc. Am. 2020, 37, B87–B92. [Google Scholar] [CrossRef]
- DeMars, K.J.; Ward, K.C. Impact of Considering and Neglecting States on Descent-to-Landing Navigation. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar]
- Kratzer, K.M.; Helmuth, J.C.; Ward, K.C.; DeMars, K.J. Impact of Sensor Model Fidelity and Scheduling on Navigation Performance. In Proceedings of the 2018 AIAA Guidance Navigation, and Control Conference, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar]
- Christian, J.A.; Lightsey, E.G. High-Fidelity Measurement Models for Optical Spacecraft Navigation. In Proceedings of the 22nd International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2009), Savannah, GA, USA, 22–25 September 2009; pp. 1486–1503. [Google Scholar]
- Farrenkopf, R. Analytic steady-state accuracy solutions for two common spacecraft attitude estimators. J. Guid. Control 1978, 1, 282–284. [Google Scholar] [CrossRef]
- Markley, F.L.; Reynolds, R. Analytic steady-state accuracy of a spacecraft attitude estimator. J. Guid. Control Dyn. 2000, 23, 1065–1067. [Google Scholar] [CrossRef] [Green Version]
- Markley, F.L. Analytic Steady-State Accuracy of a Three-Axis Spacecraft Attitude Estimator. J. Guid. Control Dyn. 2017, 40, 2393–2400. [Google Scholar] [CrossRef]
- Dianetti, A.D.; Crassidis, J.L. Extension of Farrenkopf Steady-State Solutions with Estimated Angular Rate. In Proceedings of the 2018 AIAA Guidance Navigation, and Control Conference, Kissimmee, FL, USA, 8–12 January 2018; p. 2095. [Google Scholar]
- Crassidis, J. Sigma-Point Kalman Filtering for Integrated GPS and Inertial Navigation. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 750–756. [Google Scholar] [CrossRef]
- Van Helleputte, T.; Doornbos, E.; Visser, P. CHAMP and GRACE Accelerometer Calibration by GPS-Based Orbit Determination. Adv. Space Res. 2009, 43, 1890–1896. [Google Scholar] [CrossRef]
- Chen, K.; Shen, F.; Zhou, J.; Wu, X. Simulation Platform for SINS/GPS Integrated Navigation System of Hypersonic Vehicles Based on Flight Mechanics. Sensors 2020, 20, 5418. [Google Scholar] [CrossRef]
- Yu, Z.; Crassidis, J.L. Accelerometer Bias Calibration Using Attitude and Angular Velocity Information. J. Guid. Control Dyn. 2016, 39, 741–753. [Google Scholar] [CrossRef] [Green Version]
- Olsson, F.; Kok, M.; Halvorsen, K.; Schön, T.B. Accelerometer Calibration Using Sensor Fusion with a Gyroscope. In Proceedings of the 2016 IEEE Statistical Signal Processing Workshop (SSP), Palma de Mallorca, Spain, 26–29 June 2016. [Google Scholar]
- Edwan, E.; Knedlik, S.; Loffeld, O. Angular Motion Estimation Using Dynamic Models in a Gyro-Free Inertial Measurement Unit. Sensors 2012, 12, 5310–5327. [Google Scholar] [CrossRef]
- Brawley, G.; Vanner, M.; Larsen, P.E.; Schmid, S.; Boisen, A.; Bowen, W. Nonlinear optomechanical measurement of mechanical motion. Nat. Commun. 2016, 7, 10988. [Google Scholar] [CrossRef] [PubMed]
- Xiong, H.; Si, L.G.; Wu, Y. Precision measurement of electrical charges in an optomechanical system beyond linearized dynamics. Appl. Phys. Lett. 2017, 110, 171102. [Google Scholar] [CrossRef]
- Kailath, T. Linear Systems; Prentice-Hall: Englewood Cliffs, NJ, USA, 1980. [Google Scholar]
- Crassidis, J.L.; Junkins, J.L. Optimal Estimation of Dynamic Systems; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Skelton, R.E. Dynamic Systems Control: Linear Systems Analysis and Synthesis; John Wiley & Sons: New York, NY, USA, 1988. [Google Scholar]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Kalman, R.E.; Bucy, R.S. New Results in Linear Filtering and Prediction Theory. J. Basic Eng. 1961, 83, 95–108. [Google Scholar] [CrossRef]
- Vaughan, D. A Nonrecursive Algebraic Solution for the Discrete Riccati Equation. IEEE Trans. Autom. Control 1970, 15, 597–599. [Google Scholar] [CrossRef]
- Laub, A. A Schur Method for Solving Algebraic Riccati Equations. IEEE Trans. Autom. Control 1979, 24, 913–921. [Google Scholar] [CrossRef] [Green Version]
- Arnold, W.; Laub, A. Generalized Eigenproblem Algorithms and Software for Algebraic Riccati Equations. Proc. IEEE 1984, 72, 1746–1754. [Google Scholar] [CrossRef]
- Carpenter, J.R.; D’Souza, C.N. Navigation Filter Best Practices; Technical Report; NASA/TP–2018–219822; NASA Langley Research Center: Hampton, VA, USA, 2018. [Google Scholar]
- Van Loan, C. Computing Integrals Involving the Matrix Exponential. IEEE Trans. Autom. Control 1978, 23, 395–404. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Term | Value | Units |
|---|---|---|
| 3.76 | Hz | |
| Q | ||
| 30.5 | Hz |
| Term | Value | Units |
|---|---|---|
| m/s | ||
| m/s | ||
| m | ||
| m/s | ||
| m/s |
| Term | Value | Units |
|---|---|---|
| Least Squares Error Mean | μg | |
| Least Squares Error Std Dev | μg | |
| Kalman Filter Error Mean | μg | |
| Kalman Filter Error Std Dev | μg |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kelly, P.; Majji, M.; Guzmán, F. Estimation and Error Analysis for Optomechanical Inertial Sensors. Sensors 2021, 21, 6101. https://doi.org/10.3390/s21186101
Kelly P, Majji M, Guzmán F. Estimation and Error Analysis for Optomechanical Inertial Sensors. Sensors. 2021; 21(18):6101. https://doi.org/10.3390/s21186101
Chicago/Turabian StyleKelly, Patrick, Manoranjan Majji, and Felipe Guzmán. 2021. "Estimation and Error Analysis for Optomechanical Inertial Sensors" Sensors 21, no. 18: 6101. https://doi.org/10.3390/s21186101
APA StyleKelly, P., Majji, M., & Guzmán, F. (2021). Estimation and Error Analysis for Optomechanical Inertial Sensors. Sensors, 21(18), 6101. https://doi.org/10.3390/s21186101