
Correction of Biogeochemical-Argo Radiometry for Sensor Temperature-Dependence and Drift: Protocols for a Delayed-Mode Quality Control


 , , , , , ,
, , , , , ,
Abstract
:1. Introduction
2. Materials and Methods
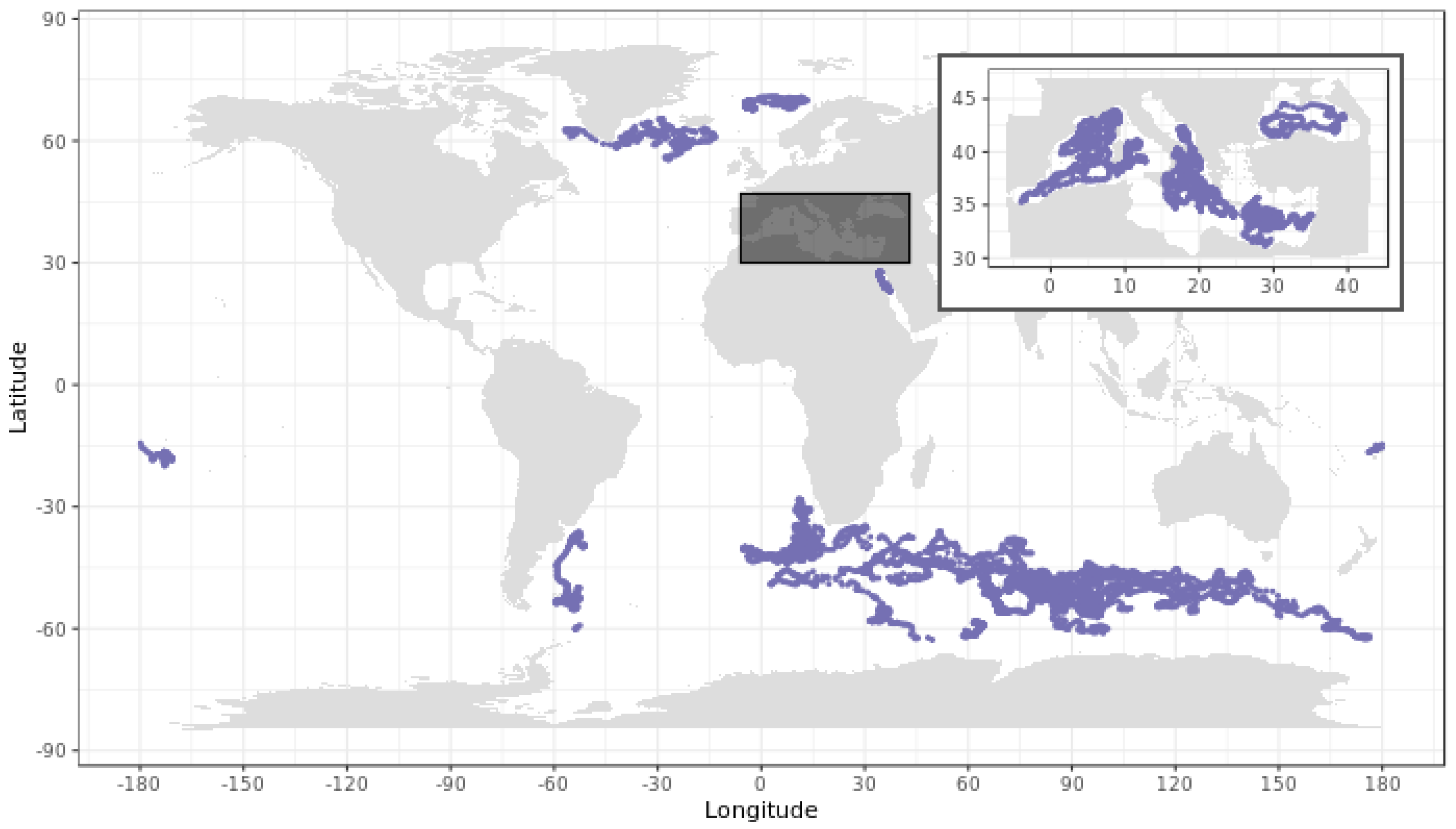
2.1. The Biogeochemical-Argo Database
2.2. Reconstruction of the Sensor Internal Temperature
- 1)
- = at the bottom of the profile. All floats spend at least one day at 1000 dbar before profiling. Thus, when the float starts acquiring measurements, the sensor temperature is at the equilibrium with the environment (1⁄k + Δt << 1 day);
- 2)
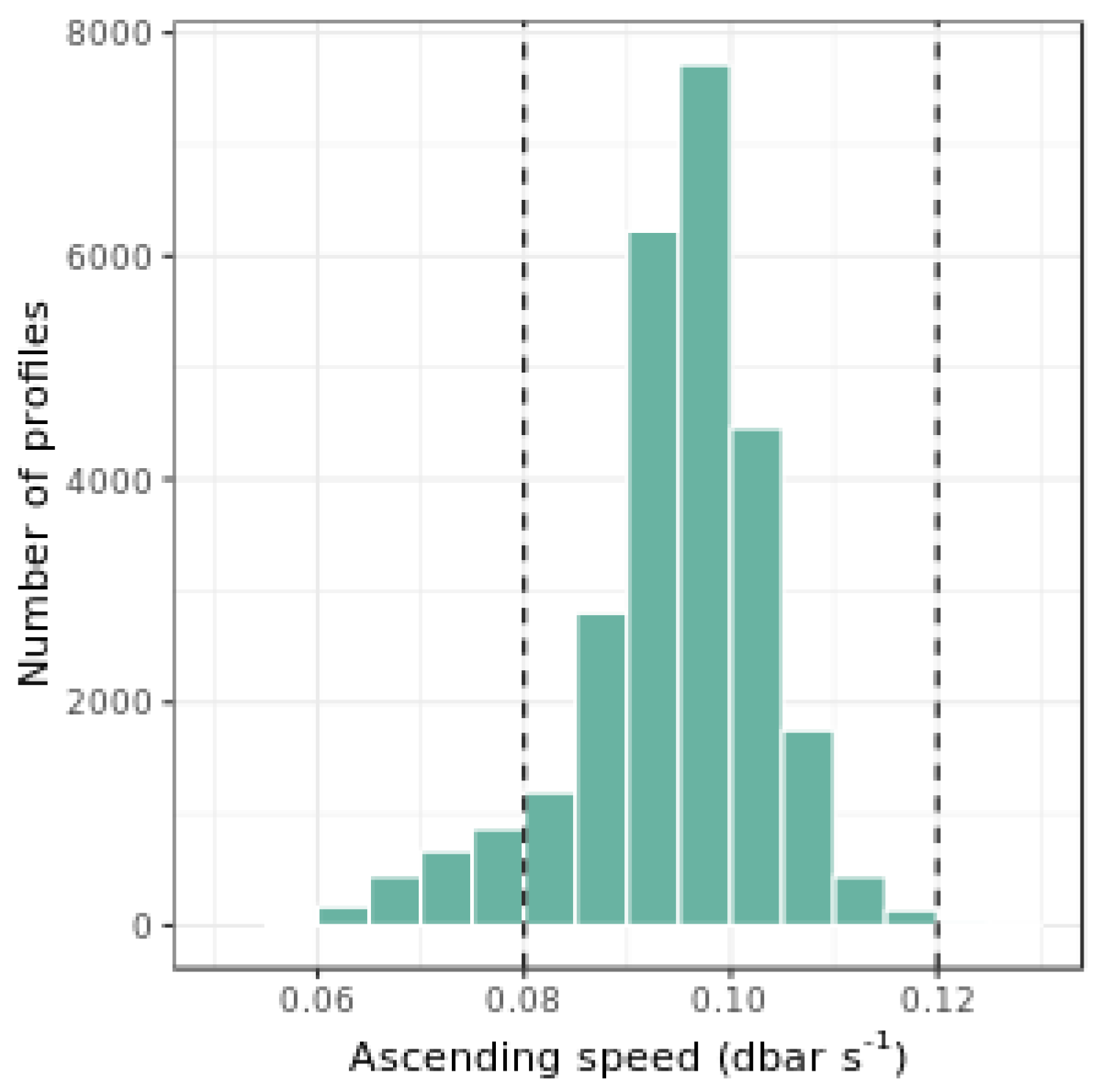
- The ascending speed of the float, c, is assumed to be constant, thus c = 0.1 dbar s−1. We analyzed 27,000 profiles from 165 PROVOR CTS-4 Argo floats, and found that 91% of the profiles showed an average ascending speed ranging between 0.08 dbar s−1 and 0.12 dbar s−1 (Figure 2). A sensitivity test on correction of Ed(490) for the float WMO 6901654 revealed that, when using 0.08 and 0.12 dbar s−1 instead of 0.1 dbar s−1, the corrected Ed(490) values change by at most 1.7 × 10−5 W m−2 nm−1, with 95% of the measurement points vary by less than 5.3 × 10−6 W m−2 nm−1. This observed variability is consistent with the manufacturer-established sensor noise of 2.5 × 10−5 W m−2 nm−1 [37].
3. Protocols for the Correction of Aging and Temperature Dependence of the Dark Signal
3.1. Theoretical Framework
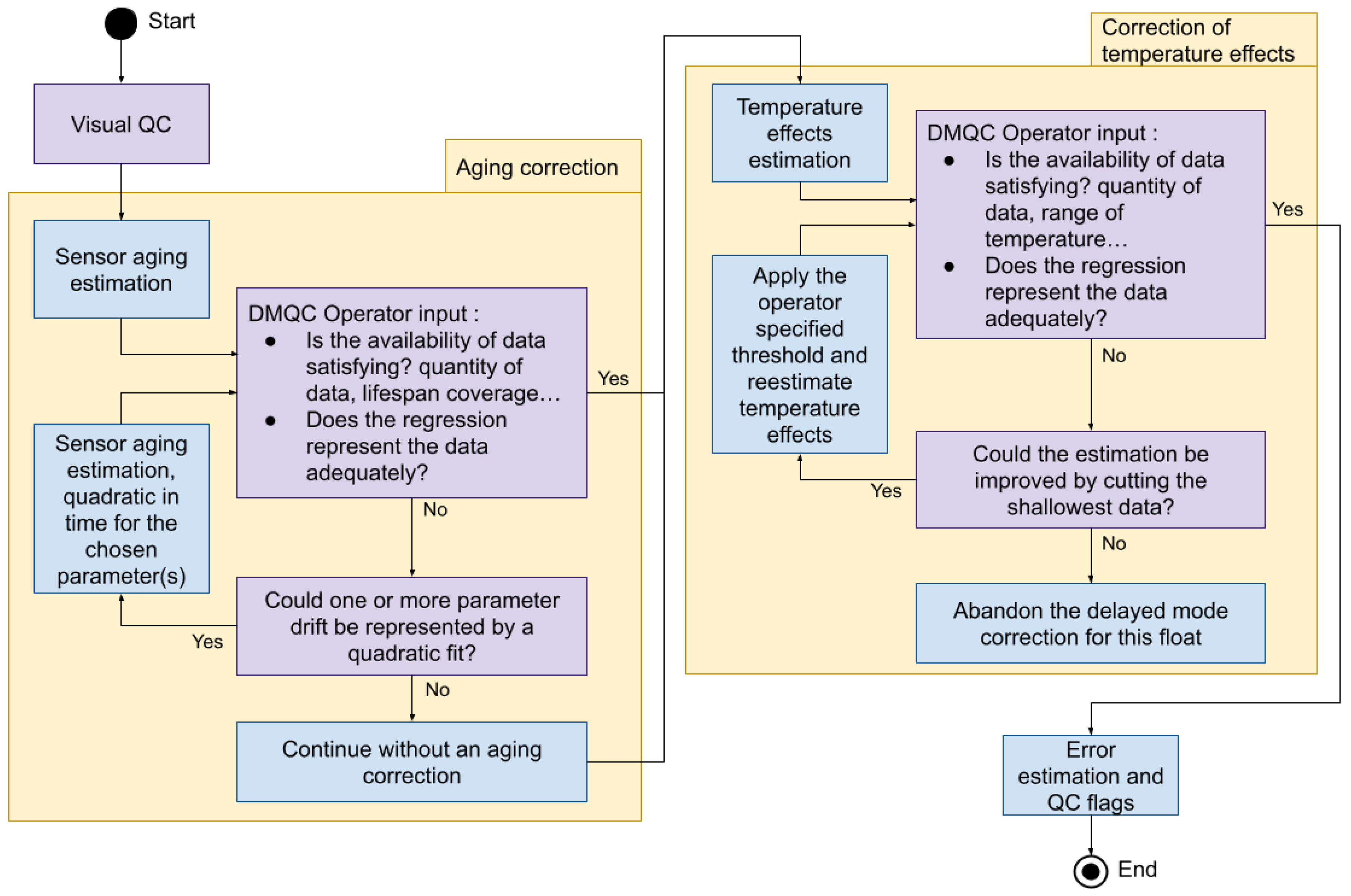
3.2. Overview of the Procedure
3.2.1. Visual Quality Control
3.2.2. Correction of the Sensor Dark’s Aging
3.2.3. Correction of the Sensor Dark’s Temperature Dependence
3.2.4. Error Estimation
3.2.5. Assignment of Quality Flags on Temperature Corrected Profiles
- Recover the QC flags assigned with the visual QC. These profiles contain Flags “1”, “2”, “3” and “4”;
- Detect the dark values within corrected profiles applying successive Lilliefors tests (α = 0.01; ref. [28]), and assign Flag “2”;
- Change radiometry flags “3” or “4” due to visual QC to “4”;
- If pressure QC flag is “3” or “4”, radiometry flag is assigned as “4”;
- If cannot be reconstructed, the radiometry flag is assigned as “4”.
4. Performance of the DM-QC Procedure
5. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Computer Code and Software
Nomenclature
| Symbol | Definition |
| Downwelling irradiance | |
| PAR | Photosynthetically Available Radiation |
| Immersion coefficient | |
| Calibration coefficients | |
| DC | Dark counts |
| Time | |
| Sensor internal temperature | |
| Rate of change of the sensor temperature | |
| Water temperature | |
| Response delay of the sensor temperature to the water temperature | |
| Ascending speed of floats (assumed constant) | |
| Sensor temperature delayed by | |
| Discretized sensor temperature | |
| Water temperature measurements, sorted from the deepest to the shallowest | |
| Discretized delayed sensor temperature, follows the water temperature measurements axis | |
| Discretized time corresponding to water temperature measurements | |
| Pressure measurements associated to water temperature measurements | |
| Pressure axis associated to | |
| Measured irradiance | |
| Real irradiance that would be obtained with a perfect sensor | |
| h | Slope error introduced by the temperature and aging effects |
| Sensor noise | |
| Error offset caused by the sensor temperature being different from calibration | |
| Error offset caused by sensor aging over time | |
| Measured irradiance, fitted to and | |
| Coefficients in the fit of drift measurements to and | |
| Measured irradiance in drift, projected on the °C plane along the fit | |
| projected on the °C plane along the fit | |
| Irradiance measurements in night profiles, corrected for sensor aging | |
| , fitted to | |
| Coefficients in the fit of night measurements to | |
| Irradiance corrected for the effects of temperature and aging on the dark signal | |
| Coefficients in the full expression of the irradiance correction | |
| Error associated to | |
| Noise Equivalent Irradiance | |
| Relative Error |
References
- Johnson, K.S.; Claustre, H. Bringing Biogeochemistry into the Argo Age. Eos 2016, 97. [Google Scholar] [CrossRef]
- Claustre, H.; Johnson, K.S.; Takeshita, Y. Observing the Global Ocean with Biogeochemical-Argo. Annu. Rev. Mar. Sci. 2020, 12, 23–48. [Google Scholar] [CrossRef] [PubMed]
- Biogeochemical-Argo Planning Group. The Scientific Rationale, Design and Implementation Plan for a Biogeochemical-Argo Float Array; Ifremer: Brest, France, 2016.
- Organelli, E.; Claustre, H.; Bricaud, A.; Barbieux, M.; Uitz, J.; D’Ortenzio, F.; Dall’Olmo, G. Bio-Optical Anomalies in the World’s Oceans: An Investigation on the Diffuse Attenuation Coefficients for Downward Irradiance Derived from Biogeochemical Argo Float Measurements. J. Geophys. Res. Oceans 2017, 122, 3543–3564. [Google Scholar] [CrossRef] [Green Version]
- Xing, X.; Claustre, H.; Wang, H.; Poteau, A.; D’Ortenzio, F. Seasonal Dynamics in Colored Dissolved Organic Matter in the Mediterranean Sea: Patterns and Drivers. Deep-Sea Res. Part I Oceanogr. Res. Pap. 2014, 83, 93–101. [Google Scholar] [CrossRef]
- Organelli, E.; Claustre, H. Small Phytoplankton Shapes Colored Dissolved Organic Matter Dynamics in the North Atlantic Subtropical Gyre. Geophys. Res. Lett. 2019, 46, 12183–12191. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gerbi, G.P.; Boss, E.; Werdell, P.J.; Proctor, C.W.; Haëntjens, N.; Lewis, M.R.; Brown, K.; Sorrentino, D.; Zaneveld, J.R.V.; Barnard, A.H.; et al. Validation of Ocean Color Remote Sensing Reflectance Using Autonomous Floats. J. Atmos. Ocean. Technol. 2016, 33, 2331–2352. [Google Scholar] [CrossRef]
- Organelli, E.; Barbieux, M.; Claustre, H.; Schmechtig, C.; Poteau, A.; Bricaud, A.; Boss, E.; Briggs, N.; Dall’Olmo, G.; D’Ortenzio, F.; et al. Two Databases Derived from BGC-Argo Float Measurements for Marine Biogeochemical and Bio-Optical Applications. Earth Syst. Sci. Data 2017, 9, 861–880. [Google Scholar] [CrossRef] [Green Version]
- Wojtasiewicz, B.; Hardman-Mountford, N.J.; Antoine, D.; Dufois, F.; Slawinski, D.; Trull, T.W. Use of Bio-Optical Profiling Float Data in Validation of Ocean Colour Satellite Products in a Remote Ocean Region. Remote Sens. Environ. 2018, 209, 275–290. [Google Scholar] [CrossRef]
- Leymarie, E.; Penkerc’h, C.; Vellucci, V.; Lerebourg, C.; Antoine, D.; Boss, E.; Lewis, M.R.; D’Ortenzio, F.; Claustre, H. ProVal: A New Autonomous Profiling Float for High Quality Radiometric Measurements. Front. Mar. Sci. 2018, 5, 18. [Google Scholar] [CrossRef] [Green Version]
- Volpe, G.; Colella, S.; Brando, V.E.; Forneris, V.; La Padula, F.; Di Cicco, A.; Sammartino, M.; Bracaglia, M.; Artuso, F.; Santoleri, R. Mediterranean Ocean Colour Level 3 Operational Multi-Sensor Processing. Ocean Sci. 2019, 15, 127–146. [Google Scholar] [CrossRef] [Green Version]
- Xing, X.; Boss, E.; Zhang, J.; Chai, F. Evaluation of Ocean Color Remote Sensing Algorithms for Diffuse Attenuation Coefficients and Optical Depths with Data Collected on BGC-Argo Floats. Remote Sens. 2020, 22, 2367. [Google Scholar] [CrossRef]
- Xing, X.; Boss, E. Chlorophyll-Based Model to Estimate Underwater Photosynthetically Available Radiation for Modeling, In-Situ, and Remote-Sensing Applications. Geophys. Res. Lett. 2021, 48, e2020GL092189. [Google Scholar] [CrossRef]
- Dall’Olmo, G.; Dingle, J.; Polimene, L.; Brewin, R.J.W.; Claustre, H. Substantial Energy Input to the Mesopelagic Ecosystem from the Seasonal Mixed-Layer Pump. Nat. Geosci. 2016, 9, 820–823. [Google Scholar] [CrossRef] [PubMed]
- Lacour, L.; Briggs, N.; Claustre, H.; Ardyna, M.; Dall’Olmo, G. The Intraseasonal Dynamics of the Mixed Layer Pump in the Subpolar North Atlantic Ocean: A Biogeochemical-Argo Float Approach. Glob. Biogeochem. Cycles 2019, 33, 266–281. [Google Scholar] [CrossRef] [Green Version]
- Kheireddine, M.; Dall’Olmo, G.; Ouhssain, M.; Krokos, G.; Claustre, H.; Schmechtig, C.; Poteau, A.; Zhan, P.; Hoteit, I.; Jones, B.H. Organic Carbon Export and Loss Rates in the Red Sea. Glob. Biogeochem. Cycles 2020, 34, e2020GB006650. [Google Scholar] [CrossRef]
- Mignot, A.; Claustre, H.; Uitz, J.; Poteau, A.; D’Ortenzio, F.; Xing, X. Understanding the Seasonal Dynamics of Phytoplankton Biomass and the Deep Chlorophyll Maximum in Oligotrophic Environments: A Bio-Argo Float Investigation. Glob. Biogeochem. Cycles 2014, 28, 856–876. [Google Scholar] [CrossRef]
- Lacour, L.; Ardyna, M.; Stec, K.F.; Claustre, H.; Prieur, L.; Poteau, A.; Ribera D’Alcala, M.; Iudicone, D. Unexpected Winter Phytoplankton Blooms in the North Atlantic Subpolar Gyre. Nat. Geosci. 2017, 10, 836–839. [Google Scholar] [CrossRef]
- Mayot, N.; D’Ortenzio, F.; Taillandier, V.; Prieur, L.; Pasqueron de Fommervault, O.; Claustre, H.; Bosse, A.; Testor, P.; Conan, P. Physical and Biogeochemical Controls of the Phytoplankton Blooms in North Western Mediterranean Sea: A Multiplatform Approach Over a Complete Annual Cycle (2012–2013 DEWEX Experiment). J. Geophys. Res. Oceans 2017, 122, 9999–10019. [Google Scholar] [CrossRef]
- Barbieux, M.; Uitz, J.; Bricaud, A.; Organelli, E.; Poteau, A.; Schmechtig, C.; Gentili, B.; Obolensky, G.; Leymarie, E.; Penkerc’h, C.; et al. Assessing the Variability in the Relationship between the Particulate Backscattering Coefficient and the Chlorophyll a Concentration From a Global Biogeochemical-Argo Database. J. Geophys. Res. Oceans 2018, 123, 1229–1250. [Google Scholar] [CrossRef]
- Mignot, A.; Ferrari, R.; Claustre, H. Floats with Bio-Optical Sensors Reveal What Processes Trigger the North Atlantic Bloom. Nat. Commun. 2018, 9, 190. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Barbieux, M.; Uitz, J.; Gentili, B.; Pasqueron de Fommervault, O.; Mignot, A.; Poteau, A.; Schmechtig, C.; Taillandier, V.; Leymarie, E.; Penkerc’h, C.; et al. Bio-Optical Characterization of Subsurface Chlorophyll Maxima in the Mediterranean Sea from a Biogeochemical-Argo FLoat Database. Biogeosciences 2019, 16, 1321–1342. [Google Scholar] [CrossRef] [Green Version]
- Kubryakov, A.A.; Mikaelyan, A.S.; Stanichny, S.V. Summer and Winter Coccolithophore Blooms in the Black Sea and Their Impact on Production of Dissolved Organic Matter from Bio-Argo Data. J. Mar. Syst. 2019, 199, 103220. [Google Scholar] [CrossRef]
- Randelhoff, A.; Lacour, L.; Marec, C.; Leymarie, E.; Lagunas, J.; Xing, X.; Darnis, G.; Penkerc’h, C.; Sampei, M.; Fortier, L.; et al. Arctic Mid-Winter Phytoplankton Growth Revealed by Autonomous Profilers. Sci. Adv. 2020, 6, eabc2678. [Google Scholar] [CrossRef]
- Ricour, F.; Capet, A.; D’Ortenzio, F.; Delille, B.; Grégoire, M. Dynamics of the Deep Chlorophyll Maximum in the Black Sea as Depicted by BGC-Argo Floats. Biogeosciences 2021, 18, 755–774. [Google Scholar] [CrossRef]
- Terzić, E.; Lazzari, P.; Organelli, E.; Solidoro, C.; Salon, S.; D’Ortenzio, F.; Conan, P. Merging Bio-Optical Data from Biogeochemical-Argo Floats and Models in Marine Biogeochemistry. Biogeosciences 2019, 16, 2527–2542. [Google Scholar] [CrossRef] [Green Version]
- Lazzari, P.; Salon, S.; Terzić, E.; Gregg, W.W.; D’Ortenzio, F.; Vellucci, V.; Organelli, E.; Antoine, D. Assessment of the Spectral Downward Irradiance at the Surface of the Mediterranean Sea Using the Radiative Ocean-Atmosphere Spectral Irradiance Model (OASIM). Ocean Sci. 2021, 17, 675–697. [Google Scholar] [CrossRef]
- Organelli, E.; Claustre, H.; Bricaud, A.; Schmechtig, C.; Poteau, A.; Xing, X.; Prieur, L.; D’Ortenzio, F.; Dall’Olmo, G.; Vellucci, V. A Novel Near-Real-Time Quality-Control Procedure for Radiometric Profiles Measured by Bio-Argo Floats: Protocols and Performances. J. Atmos. Ocean. Technol. 2016, 33, 937–951. [Google Scholar] [CrossRef]
- IOCCG Protocol Series. Protocols for Satellite Ocean Colour Data Validation: In Situ Optical Radiometry. Vol. 3.0; International Ocean Colour Coordinating Group (IOCCG): Dartmouth, NS, Canada, 2019. [Google Scholar]
- Xing, X.; Lagunas-Morales, J. Laboratory Results on the Dependence of Dark Current upon Environmental Temperature Variability for Satlantic’s OCR504 Radiometers. In Proceedings of the Optical Precision Manufacturing, Testing, and Applications, Beijing, China, 22–24 May 2018. [Google Scholar]
- Argo Data Management. Argo User’s Manual V3.4; Ifremer: Brest, France, 2021.
- Poteau, A.; Organelli, E.; Boss, E.; Xing, X. Quality Control for BGC-Argo Radiometry; Ifremer: Brest, France, 2019.
- Mueller, J.L.; Fargion, G.S.; McClain, C.R.; Mueller, J.L.; Morel, A.; Frouin, R.; Davis, C.; Arnone, R.; Carder, K.; Steward, R.G.; et al. Ocean Optics Protocols For Satellite Ocean Color Sensor Validation, Revision 4, Volume III: Radiometric Measurements and Data Analysis Protocols; Goddard Space Flight Space Center: Greenbelt, MD, USA, 2003; p. 84.
- Białek, A.; Vellucci, V.; Gentili, B.; Antoine, D.; Gorroño, J.; Fox, N.; Underwood, C. Monte Carlo-Based Quantification of Uncertainties in Determining Ocean Remote Sensing Reflectance from Underwater Fixed-Depth Radiometry Measurements. J. Atmos. Ocean. Technol. 2020, 37, 177–196. [Google Scholar] [CrossRef]
- Bittig, H.C.; Maurer, T.L.; Plant, J.N.; Schmechtig, C.; Wong, A.P.S.; Claustre, H.; Trull, T.W.; Udaya Bhaskar, T.V.S.; Boss, E.; Dall’Olmo, G.; et al. A BGC-Argo Guide: Planning, Deployment, Data Handling and Usage. Front. Mar. Sci. 2019, 6, 502. [Google Scholar] [CrossRef] [Green Version]
- Wong, A.; Keeley, R.; Carval, T.; A.D.M. Team. Argo Quality Control Manual for CTD and Trajectory Data; Ifremer: Brest, France, 2021.
- SATLANTIC. Operation Manual for the OCR-504; SATLANTIC Operation Manual; Satlantic LP: Halifax, NS, Canada, 2013; p. 66. [Google Scholar]
- Shockley, W. The Theory of p-n Junctions in Semiconductors and p-n Junction Transistors. Bell Syst. Tech. J. 1949, 28, 435–489. [Google Scholar] [CrossRef]
- Kuusk, J. Dark Signal Temperature Dependence Correction Method for Miniature Spectrometer Modules. J. Sens. 2011, 2011. [Google Scholar] [CrossRef]
- Möttus, M.; Sulev, M.; Baret, F.; Lopez-Lozano, R.; Reinart, A. Photosynthetically Active Radiation: Measurement and Modeling. In SpringerReference; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Hooker, S.B.; McLean, S.; Sherman, J.; Small, M.; Lazin, G.; Zibordi, G.; Brown, J.W. Volume 17, The Seventh SeaWiFS Intercalibration Round-Robin Experiment (SIRREX-7), March 1999. SeaWiFS Postlaunch Technical Report Series; Goddard Space Flight Space Center: Greenbelt, MD, USA, 2002; p. 74.
- Voss, K.J.; McLean, S.; Lewis, M.; Johnson, C.; Flora, S.; Feinholz, M.; Yarbrough, M.; Trees, C.; Twardowski, M.; Clark, D. An Example Crossover Experiment for Testing New Vicarious Calibration Techniques for Satellite Ocean Color Radiometry. J. Atmos. Ocean. Technol. 2010, 27, 1747–1759. [Google Scholar] [CrossRef] [Green Version]
- Poteau, A.; Boss, E.; Claustre, H. Particulate Concentration and Seasonal Dynamics in the Mesopelagic Ocean Based on the Backscattering Coefficient Measured with Biogeochemical-Argo Floats. Geophys. Res. Lett. 2017, 44, 6933–6939. [Google Scholar] [CrossRef] [Green Version]
- Bellacicco, M.; Cornec, M.; Organelli, E.; Brewin, R.J.W.; Neukermans, G.; Volpe, G.; Barbieux, M.; Poteau, A.; Schmechtig, C.; D’Ortenzio, F.; et al. Global Variability of Optical Backscattering by Non-Algal Particles From a Biogeochemical-Argo Data Set. Geophys. Res. Lett. 2019, 46, 9767–9776. [Google Scholar] [CrossRef]
- Gordon, H.R.; McCluney, W.R. Estimation of the Depth of Sunlight Penetration in the Sea for Remote Sensing. Appl. Opt. 1975, 14, 413. [Google Scholar] [CrossRef]
- Roemmich, D.; Alford, M.H.; Claustre, H.; Johnson, K.; King, B.; Moum, J.; Oke, P.; Owens, W.B.; Pouliquen, S.; Purkey, S.; et al. On the Future of Argo: A Global, Full-Depth, Multi-Disciplinary Array. Front. Mar. Sci. 2019, 6, 439. [Google Scholar] [CrossRef] [Green Version]
- Xing, X.; Morel, A.; Claustre, H.; Antoine, D.; D’Ortenzio, F.; Poteau, A.; Mignot, A. Combined Processing and Mutual Interpretation of Radiometry and Fluorimetry from Autonomous Profiling Bio-Argo Floats: Chlorophyll a Retrieval. J. Geophys. Res. 2011, 116, C06020. [Google Scholar] [CrossRef]
- Werdell, P.J.; Behrenfeld, M.J.; Bontempi, P.S.; Boss, E.; Cairns, B.; Davis, G.T.; Franz, B.A.; Gliese, U.B.; Gorman, E.T.; Hasekamp, O.; et al. The Plankton, Aerosol, Cloud, Ocean Ecosystem Mission: Status, Science, Advances. Bull. Am. Meteorol. Soc. 2019, 100, 1775–1794. [Google Scholar] [CrossRef]
- Jemai, A.; Wollschläger, J.; Voß, D.; Zielinski, O. Radiometry on Argo Floats: From the Multispectral State-of-the-Art on the Step to Hyperspectral Technology. Front. Mar. Sci. 2021, 8, 676537. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| OCR 504 Model | Drift Acquired for > 80% of the Float Lifetime | Drift Acquired for ≤ 80% of the Float Lifetime | Total | ||
|---|---|---|---|---|---|
| Night Profiles | No Night | Night Profiles | No Night | ||
| PEEK | 50 | 10 | 32 | 17 | 109 |
| Aluminum | 5 | 1 | 9 | 7 | 22 |
| All | 55 | 11 | 41 | 24 | 131 |
| OCR 504 Model | k | Δt |
|---|---|---|
| PEEK | 0.2 min−1 | 1 min |
| Aluminum | 0.44 min−1 | 0.25 min |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jutard, Q.; Organelli, E.; Briggs, N.; Xing, X.; Schmechtig, C.; Boss, E.; Poteau, A.; Leymarie, E.; Cornec, M.; D’Ortenzio, F.; et al. Correction of Biogeochemical-Argo Radiometry for Sensor Temperature-Dependence and Drift: Protocols for a Delayed-Mode Quality Control. Sensors 2021, 21, 6217. https://doi.org/10.3390/s21186217
Jutard Q, Organelli E, Briggs N, Xing X, Schmechtig C, Boss E, Poteau A, Leymarie E, Cornec M, D’Ortenzio F, et al. Correction of Biogeochemical-Argo Radiometry for Sensor Temperature-Dependence and Drift: Protocols for a Delayed-Mode Quality Control. Sensors. 2021; 21(18):6217. https://doi.org/10.3390/s21186217
Chicago/Turabian StyleJutard, Quentin, Emanuele Organelli, Nathan Briggs, Xiaogang Xing, Catherine Schmechtig, Emmanuel Boss, Antoine Poteau, Edouard Leymarie, Marin Cornec, Fabrizio D’Ortenzio, and et al. 2021. "Correction of Biogeochemical-Argo Radiometry for Sensor Temperature-Dependence and Drift: Protocols for a Delayed-Mode Quality Control" Sensors 21, no. 18: 6217. https://doi.org/10.3390/s21186217
APA StyleJutard, Q., Organelli, E., Briggs, N., Xing, X., Schmechtig, C., Boss, E., Poteau, A., Leymarie, E., Cornec, M., D’Ortenzio, F., & Claustre, H. (2021). Correction of Biogeochemical-Argo Radiometry for Sensor Temperature-Dependence and Drift: Protocols for a Delayed-Mode Quality Control. Sensors, 21(18), 6217. https://doi.org/10.3390/s21186217