
Retrieval of Raindrop Size Distribution Using Dual-Polarized Microwave Signals from LEO Satellites: A Feasibility Study through Simulations


Abstract
:1. Introduction
- A theoretical model is built for the novel approach for raindrop size distribution retrieval using dual-polarized microwave signals from LEO satellites;
- The feasibility of the approach is investigated through simulations of synthetic rain events and realistic satellite communication systems;
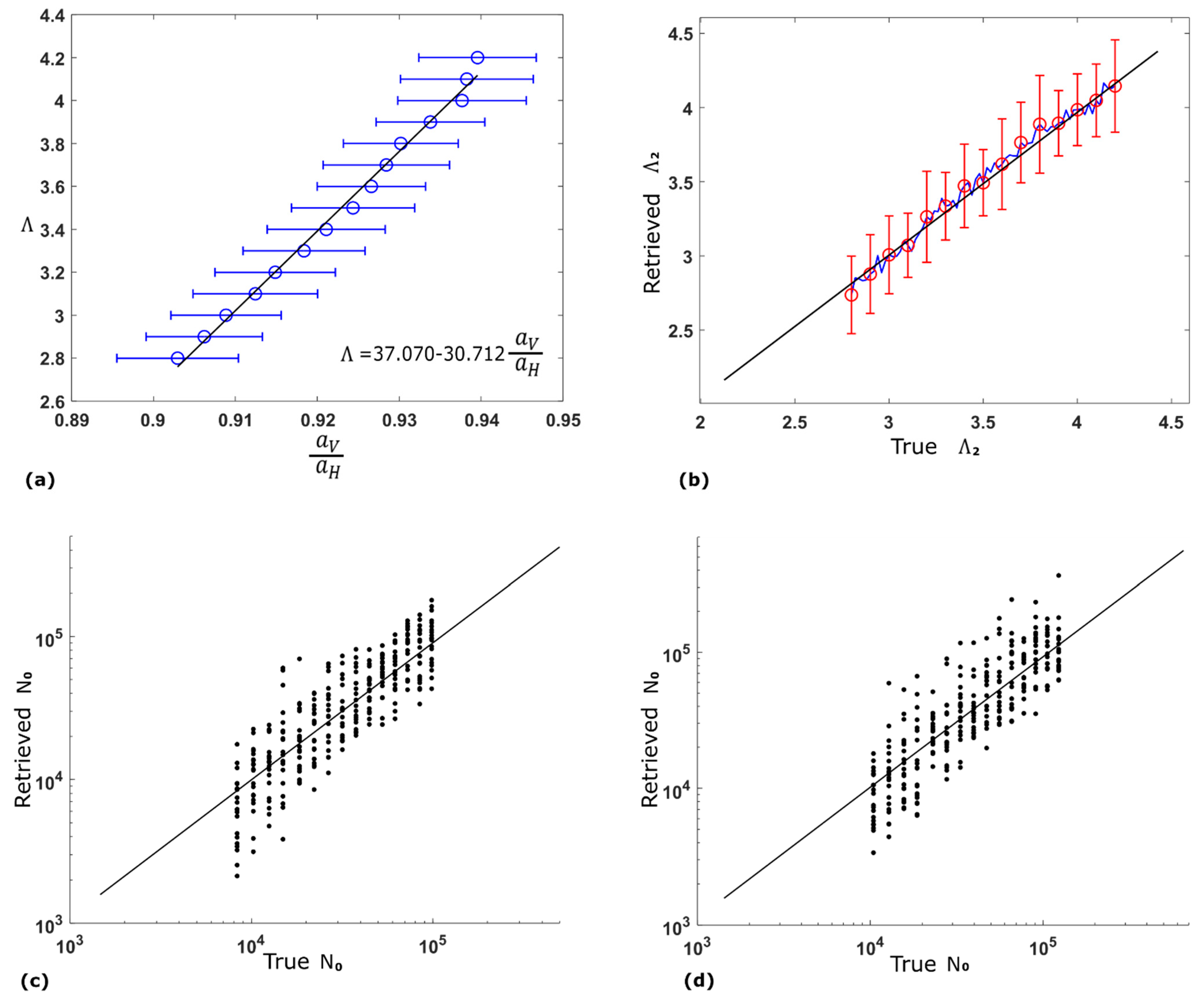
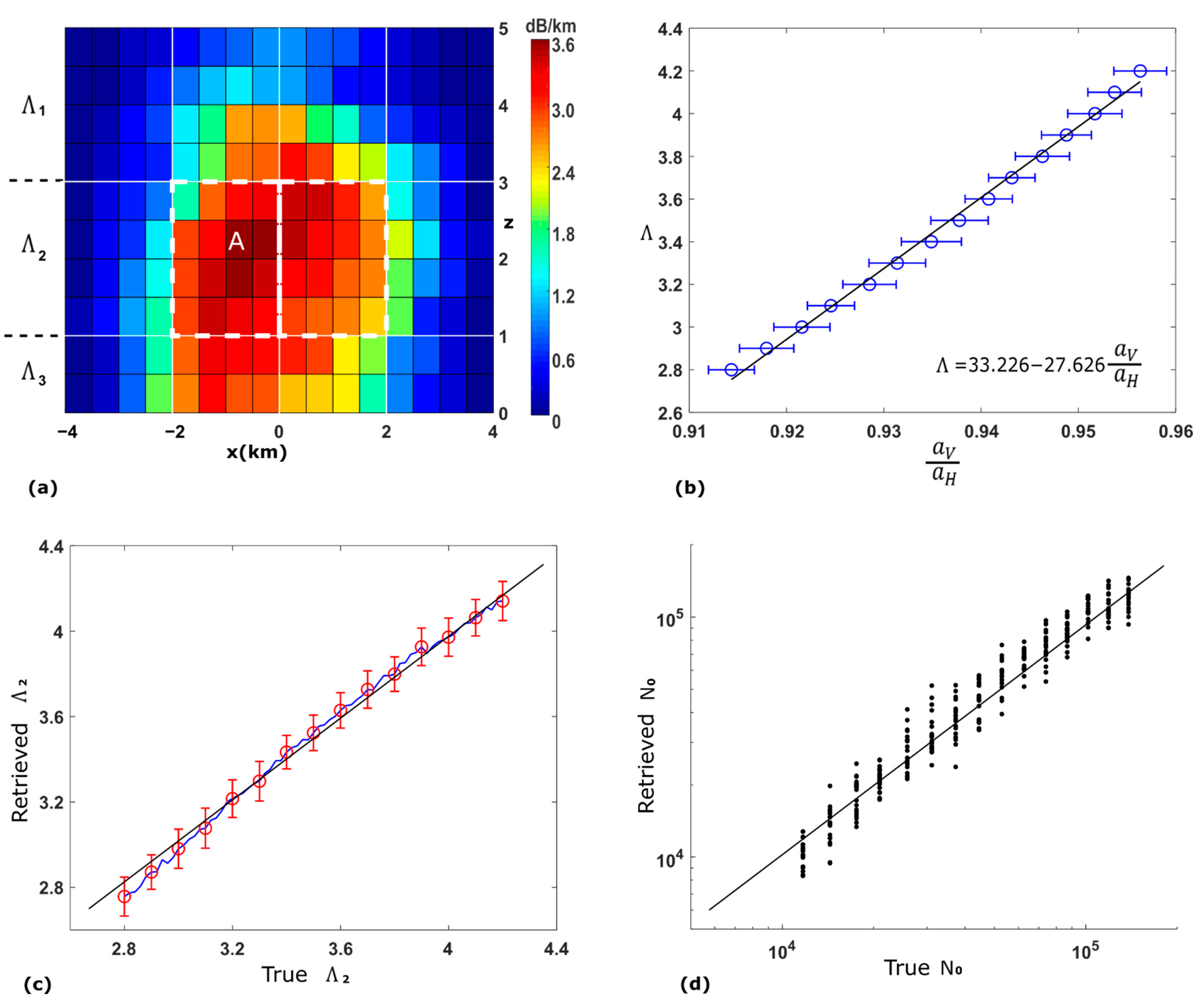
- It is confirmed that the specific attenuation ratio of vertically to horizontally polarized signals can be used to retrieve the slope and intercept parameters of DSD.
2. Model and Methods
2.1. Satellite Signal Model
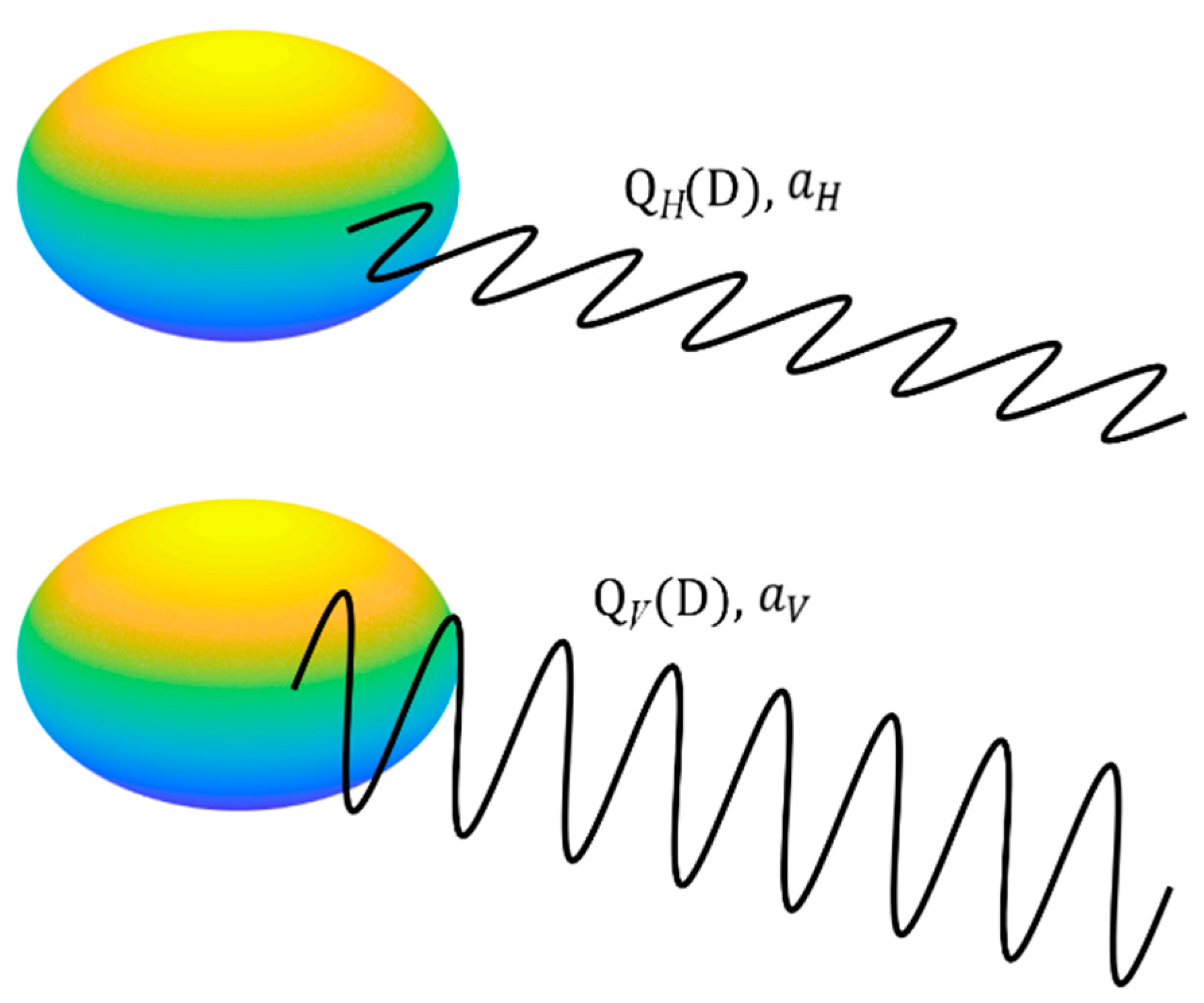
2.2. Specific Attenuation and DSD
2.3. Retrieval Method
3. Simulations and Results
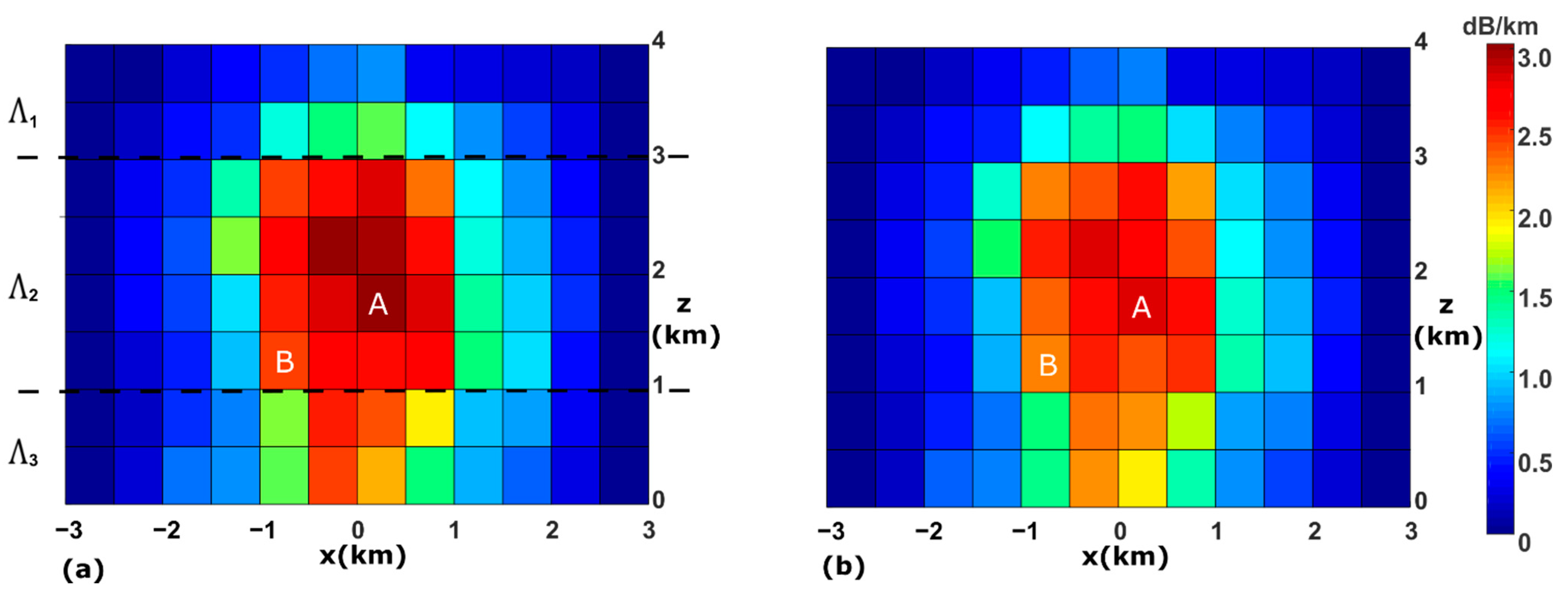
3.1. Synthetic DSD Field
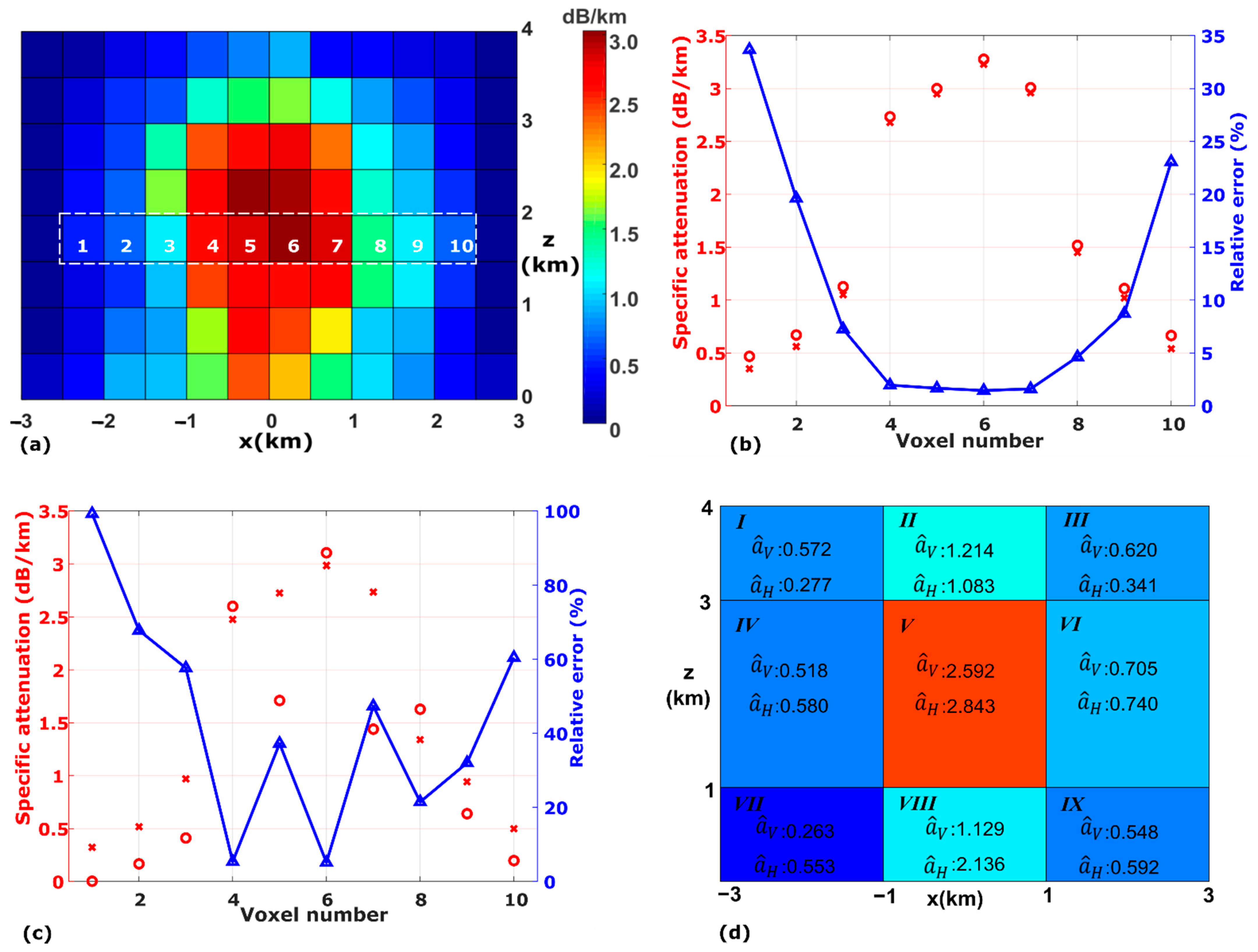
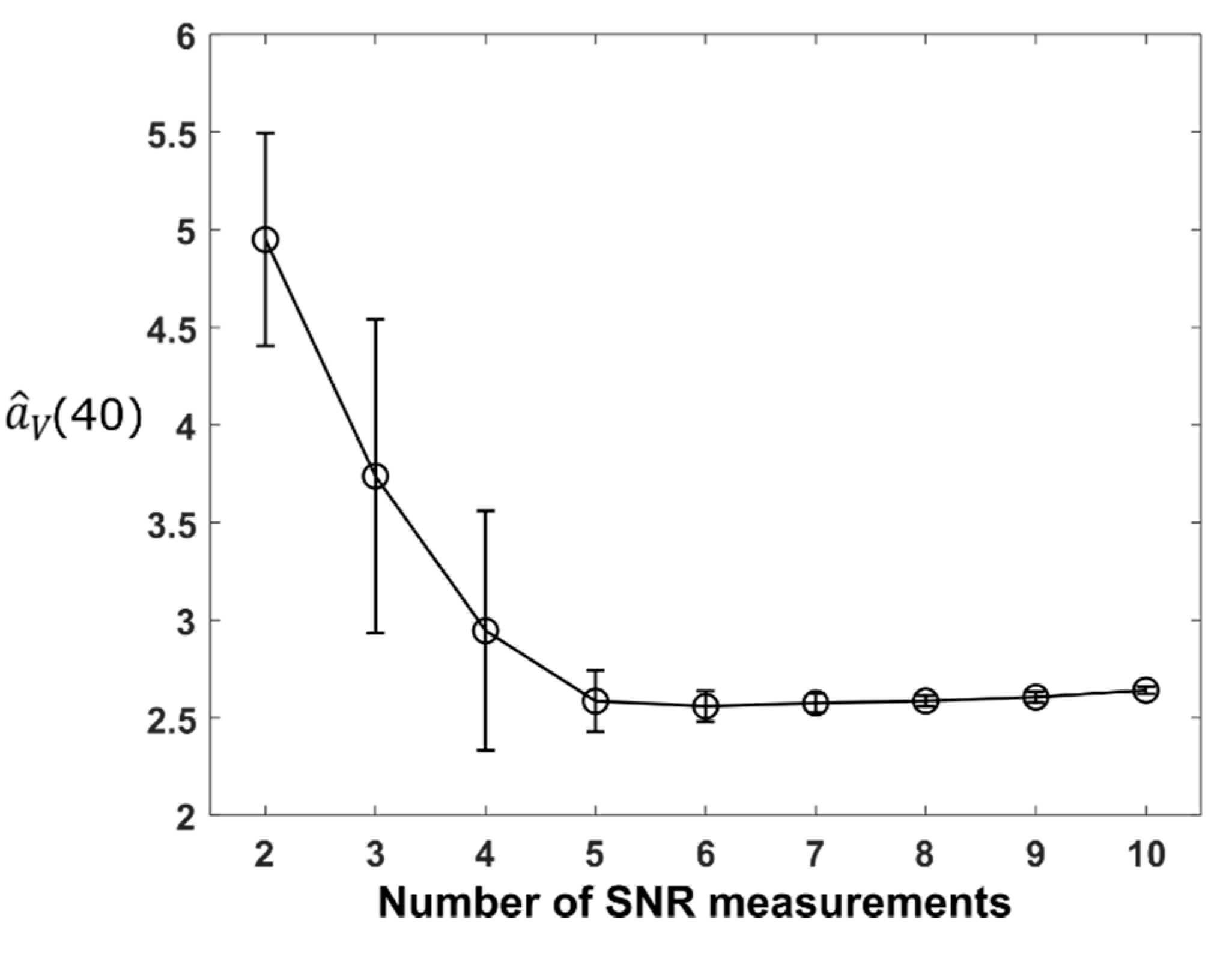
3.2. Retrieval of Specific Attenuation
| Algorithm 1. The iterative process used to update the noise figure. |
| Input:, ; Output: for all voxels initialize ; while not the last iteration do Use least-squares to solve , Calculate using , Update using and. |
3.3. Retrieval of DSD Parameters
3.4. Simulations of Another Rain Event
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Atlas, D.; Ulbrich, C.W. Path- and Area-Integrated Rainfall Measurement by Microwave Attenuation in the 1–3 cm Band. J. Appl. Meteorol. 1977, 16, 1322–1331. [Google Scholar] [CrossRef] [Green Version]
- Ippolito, L.J. Propagation Effects Handbook for Satellite Systems; NASA: Washington, DC, USA, 1989; Volume 1082.
- Giuli, D.; Toccafondi, G.; Gentili, B.; Freni, A. Tomographic Reconstruction of Rainfall Fields through Microwave Attenuation Measurements. J. Appl. Meteorol. 1991, 30, 1323–1340. [Google Scholar] [CrossRef] [Green Version]
- Messer, H.; Zinevich, A.; Alpert, P. Environmental Monitoring by Wireless Communication Networks. Science 2006, 312, 713. [Google Scholar] [CrossRef] [Green Version]
- Leijnse, H.; Uijlenhoet, R.; Stricker, J.N.M. Rainfall measurement using radio links from cellular communication networks. Water Resour. Res. 2007, 43, W03201. [Google Scholar] [CrossRef]
- Goldshtein, O.; Messer, H.; Zinevich, A. Rain Rate Estimation Using Measurements from Commercial Telecommunications Links. IEEE Trans. Signal Process. 2009, 57, 1616–1625. [Google Scholar] [CrossRef]
- Zinevich, A.; Pinhas, A.; Messer, H. Estimation of rainfall fields using commercial microwave communication networks of variable density. Adv. Water Resour. 2008, 31, 1470–1480. [Google Scholar] [CrossRef]
- Messer, H.; Zinevich, A.; Alpert, P. Environmental sensor networks using existing wireless communication systems for rainfall and wind velocity measurements. IEEE Instrum. Meas. Mag. 2012, 15, 32–38. [Google Scholar] [CrossRef]
- Messer, H.; Sendik, O. A New Approach to Precipitation Monitoring: A critical survey of existing technologies and challenges. IEEE Signal Process. Mag. 2015, 32, 110–122. [Google Scholar] [CrossRef]
- Barthès, L.; Mallet, C. Rainfall measurement from the opportunistic use of an Earth–space link in the Ku band. Atmos. Meas. Tech. 2013, 6, 2181–2193. [Google Scholar] [CrossRef] [Green Version]
- Giannetti, F.; Reggiannini, R.; Moretti, M.; Adirosi, E.; Baldini, L.; Facheris, L.; Antonini, A.; Melani, S.; Bacci, G.; Petrolino, A.; et al. Real-Time Rain Rate Evaluation via Satellite Downlink Signal Attenuation Measurement. Sensors 2017, 17, 1864. [Google Scholar] [CrossRef]
- Gharanjik, A.; Bhavan Shankar, M.R.; Zimmer, F.; Ottersten, F. Centralized Rainfall Estimation Using Carrier to Noise of Satellite Communication Links. IEEE J. Sel. Areas Commun. 2018, 36, 1065–1073. [Google Scholar] [CrossRef] [Green Version]
- Arslan, C.H.; Kuletgin, A.; Urbino, J.V.; Dyrud, L. Satellite-Link Attenuation Measurement Technique for Estimating Rainfall Accumulation. IEEE Trans. Geosci. Remote Sens. 2018, 56, 681–693. [Google Scholar] [CrossRef]
- Su, Y.; Liu, Y.; Zhou, Y.; Yuan, J.; Cao, H.; Shi, C. Broadband LEO Satellite Communications: Architectures and Key Technologies. IEEE Wirel. Commun. 2019, 26, 55–61. [Google Scholar] [CrossRef]
- Pachler, N.; Del Portillo, I.; Crawley, E.F.; Cameron, B.G. An Updated Comparison of Four Low Earth Orbit Satellite Constellation Systems to Provide Global Broadband. In Proceedings of the 2021 IEEE International Conference on Communications Workshops (ICC Workshops), Montreal, QC, Canada, 14–23 June 2021. [Google Scholar]
- Lemorton, J.; Castanet, L.; Lacoste, F.; Riva, C.; Matricciani, E.; Fiebig, U.-C.; Van de Kamp, M.; Martellucci, A. Development and validation of time-series synthesizers of rain attenuation for Ka-band and Q/V-band satellite communication systems. Int. J. Satell. Commun. Netw. 2007, 25, 575–601. [Google Scholar] [CrossRef] [Green Version]
- Huang, D.; Lu, X.; Feng, X.; Wang, W. A hypothesis of 3D rainfall tomography using satellite signals. J. Commun. Inf. Netw. 2016, 1, 134–142. [Google Scholar]
- Kak, A.C.; Slaney, M. Principles of Computerized Tomographic Imaging; SIAM: Philadelphia, PA, USA, 2001. [Google Scholar]
- Shen, X.; Huang, D.D.; Song, B.; Vincent, C.; Togneri, R. 3-D Tomographic Reconstruction of Rain Field Using Microwave Signals from LEO Satellites: Principle and Simulation Results. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5434–5446. [Google Scholar] [CrossRef]
- Shen, X.; Huang, D.; Vincent, C.; Wang, W.; Tigneri, R. A Differential Approach for Rain Field Tomographic Reconstruction Using Microwave Signals from Leo Satellites. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020. [Google Scholar]
- Song, B.; Huang, D.; Xi, S.; Togneri, R. Performance Analysis for Path Attenuation Estimation of Microwave Signals Due to Rainfall and Beyond. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020. [Google Scholar]
- Xu, L.; Huang, D.; Feng, X.; Wang, W. Tomographic reconstruction of rainfall fields using satellite communication links. In Proceedings of the 2017 23rd Asia-Pacific Conference on Communications (APCC), Perth, Australia, 11–13 December 2017. [Google Scholar]
- Ulbrich, C.W. Natural Variations in the Analytical Form of the Raindrop Size Distribution. J. Appl. Meteorol. Climatol. 1983, 22, 1764–1775. [Google Scholar] [CrossRef] [Green Version]
- Holt, A.R.; Upton, J.W.F.; Willis, G.J.G.; Rahimi, A.R.; Baxter, P.D.; Collier, C.G. Measurement of rainfall by dual-wavelength microwave attenuation. Electron. Lett. 2000, 36, 2099–2101. [Google Scholar] [CrossRef]
- Rincon, R.F.; Lang, R.H. Microwave link dual-wavelength measurements of path-average attenuation for the estimation of drop size distributions and rainfall. IEEE Trans. Geosci. Remote Sens. 2002, 40, 760–770. [Google Scholar] [CrossRef]
- Ruf, C.S.; Kultegin, A.; Mathur, S.; Bobak, J.P. 35-GHz Dual-Polarization Propagation Link for Rain-Rate Estimation. J. Atmos. Ocean. Technol. 1996, 13, 419–425. [Google Scholar] [CrossRef] [Green Version]
- Aydin, K.; Daisley, S.E.A. Relationships between rainfall rate and 35-GHz attenuation and differential attenuation: Modeling the effects of raindrop size distribution, canting, and oscillation. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2343–2352. [Google Scholar] [CrossRef]
- Song, K.; Liu, X.; Gao, T.; He, B. Raindrop Size Distribution Retrieval Using Joint Dual-Frequency and Dual-Polarization Microwave Links. Adv. Meteorol. 2019, 2019, 7251870. [Google Scholar] [CrossRef]
- Kozu, T.; Nakamura, K. Rainfall Parameter Estimation from Dual-Radar Measurements Combining Reflectivity Profile and Path-integrated Attenuation. J. Atmos. Ocean. Technol. 1991, 8, 259–270. [Google Scholar] [CrossRef] [Green Version]
- Kumar, L.S.; Lee, Y.H.; Ong, J.T. Two-Parameter Gamma Drop Size Distribution Models for Singapore. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3371–3380. [Google Scholar] [CrossRef]
- Munchak, S.J.; Tokay, A. Retrieval of Raindrop Size Distribution from Simulated Dual-Frequency Radar Measurements. J. Appl. Meteorol. Climatol. 2008, 47, 223–239. [Google Scholar] [CrossRef]
- Pruppacher, H.R.; Beard, K.V. A wind tunnel investigation of the internal circulation and shape of water drops falling at terminal velocity in air. Q. J. R. Meteorol. Soc. 1970, 96, 247–256. [Google Scholar] [CrossRef]
- Mishchenko, M.I.; Travis, L.D.; Mackowski, D.W. T-matrix computations of light scattering by nonspherical particles: A review. J. Quant. Spectrosc. Radiat. Transf. 1996, 55, 535–575. [Google Scholar] [CrossRef]
- Shen, X.; Defeng, D.D.; Wang, W.; Prein, A.F.; Togneri, R. Retrieval of Cloud Liquid Water Using Microwave Signals from LEO Satellites: A Feasibility Study through Simulations. Atmosphere 2020, 11, 460. [Google Scholar] [CrossRef]
- Hogg, D.C.; Ta-Shing, C. The role of rain in satellite communications. Proc. IEEE 1975, 63, 1308–1331. [Google Scholar] [CrossRef]
- Beard, K.V.; Bringi, V.N.; Thurai, M. A new understanding of raindrop shape. Atmos. Res. 2010, 97, 396–415. [Google Scholar] [CrossRef]
- Mishchenko, M.I.; Travis, L.D. Capabilities and limitations of a current FORTRAN implementation of the T-matrix method for randomly oriented, rotationally symmetric scatterers. J. Quant. Spectrosc. Radiat. Transf. 1998, 60, 309–324. [Google Scholar] [CrossRef]
- Waterman, P.C. Matrix formulation of electromagnetic scattering. Proc. IEEE 1965, 53, 805–812. [Google Scholar] [CrossRef]
- Shen, X.; Huang, D.D.; Xu, L.; Tang, X. Reconstruction of vertical rainfall fields using satellite communication links. In Proceedings of the 2017 23rd Asia-Pacific Conference on Communications (APCC), Perth, WA, Australia, 11–13 December 2017; pp. 1–6. [Google Scholar]
- Tang, Q.; Xiao, H.; Guo, C.; Feng, L. Characteristics of the raindrop size distributions and their retrieved polarimetric radar parameters in northern and southern China. Atmos. Res. 2014, 135, 59–75. [Google Scholar] [CrossRef]
- Yang, Q.; Dai, Q.; Han, D.; Chen, Y.; Zhang, S. Sensitivity analysis of raindrop size distribution parameterizations in WRF rainfall simulation. Atmos. Res. 2019, 228, 1–13. [Google Scholar] [CrossRef]
- Van Leth, T.C.; Leijnse, H.; Overeem, A.; Uijlenhoet, R. Estimating raindrop size distributions using microwave link measurements: Potential and limitations. Atmos. Meas. Tech. 2020, 13, 1797–1815. [Google Scholar] [CrossRef] [Green Version]
- Ryzhkov, A.; Pinsky, M.; Pokrovsky, A.; Khain, A. Polarimetric Radar Observation Operator for a Cloud Model with Spectral Microphysics. J. Appl. Meteorol. Climatol. 2011, 50, 873–894. [Google Scholar] [CrossRef]
- Somerville, W.R.C.; Auguié, B.; Le Ru, E.C. Smarties: User-friendly codes for fast and accurate calculations of light scattering by spheroids. J. Quant. Spectrosc. Radiat. Transf. 2016, 174, 39–55. [Google Scholar] [CrossRef] [Green Version]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice-Hall: Hoboken, NJ, USA, 1993. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elevation Angle (°) | |||||
|---|---|---|---|---|---|
| 40 | 55 | 70 | 90 | ||
| D (mm) | 0.5 | 1.1337 | 1.1336 | 1.1335 | 1.1335 |
| 1.0 | 23.634 | 23.499 | 23.389 | 23.327 | |
| 2.0 | 509.52 | 507.46 | 505.76 | 504.82 | |
| 4.0 | 4019.0 | 4139.8 | 4243.7 | 4302.9 | |
| 6.0 | 9064.2 | 9318.2 | 9487.6 | 9562.0 | |
| Elevation Angle (°) | |||||
|---|---|---|---|---|---|
| 40 | 55 | 70 | 90 | ||
| D (mm) | 0.5 | 0.9989 | 0.9994 | 0.9998 | 1 |
| 1.0 | 0.9700 | 0.9831 | 0.9939 | 1 | |
| 2.0 | 0.9045 | 0.9461 | 0.9807 | 1 | |
| 4.0 | 0.8585 | 0.9220 | 0.9727 | 1 | |
| 6.0 | 0.8366 | 0.9191 | 0.9746 | 1 | |
| 2.8 | 3.3 | 3.8 | 4.2 | ||
|---|---|---|---|---|---|
(°) | 42.80 | 1.0000 | 0.9996 | 0.9992 | 0.9991 |
| 54.34 | 1.0000 | 0.9977 | 0.9961 | 0.9955 | |
| 66.68 | 1.0001 | 0.9959 | 0.9933 | 0.9921 | |
| 88.72 | 1.0003 | 0.9943 | 0.9909 | 0.9893 | |
| 2.8 | 3.3 | 3.8 | 4.2 | ||
|---|---|---|---|---|---|
(°) | 42.80 | 1.0090 | 1.0064 | 1.0052 | 1.0044 |
| 54.34 | 1.0436 | 1.0344 | 1.0267 | 1.0216 | |
| 66.68 | 1.0773 | 1.0600 | 1.0467 | 1.0381 | |
| 88.72 | 1.1057 | 1.0819 | 1.0639 | 1.0523 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, X.; Huang, D.D. Retrieval of Raindrop Size Distribution Using Dual-Polarized Microwave Signals from LEO Satellites: A Feasibility Study through Simulations. Sensors 2021, 21, 6389. https://doi.org/10.3390/s21196389
Shen X, Huang DD. Retrieval of Raindrop Size Distribution Using Dual-Polarized Microwave Signals from LEO Satellites: A Feasibility Study through Simulations. Sensors. 2021; 21(19):6389. https://doi.org/10.3390/s21196389
Chicago/Turabian StyleShen, Xi, and Defeng David Huang. 2021. "Retrieval of Raindrop Size Distribution Using Dual-Polarized Microwave Signals from LEO Satellites: A Feasibility Study through Simulations" Sensors 21, no. 19: 6389. https://doi.org/10.3390/s21196389
APA StyleShen, X., & Huang, D. D. (2021). Retrieval of Raindrop Size Distribution Using Dual-Polarized Microwave Signals from LEO Satellites: A Feasibility Study through Simulations. Sensors, 21(19), 6389. https://doi.org/10.3390/s21196389