
A Novel Hybrid Deep Learning Method for Fault Diagnosis of Rotating Machinery Based on Extended WDCNN and Long Short-Term Memory




Abstract
:1. Introduction
- (1)
- The novel hybrid DL method can be implemented under different bearing health conditions, as it fully uses previous information for extraction features and has a stronger self-learning capacity to achieve a high accuracy for fault classification.
- (2)
- The proposed method integrates the advantages of the improved WDCNN method and LSTM method, and uses various neural networks for stronger features of self-learning from large vibration signals.
- (3)
- The t-distributed Stochastic Neighbor Embedding (t-SNE) can show different mapping abilities of the neural networks for fault classification. This visualization can display how different layers capture the information step by step, and ten different fault styles of vibration bearing signals were easily recognized by the novel hybrid DL method.
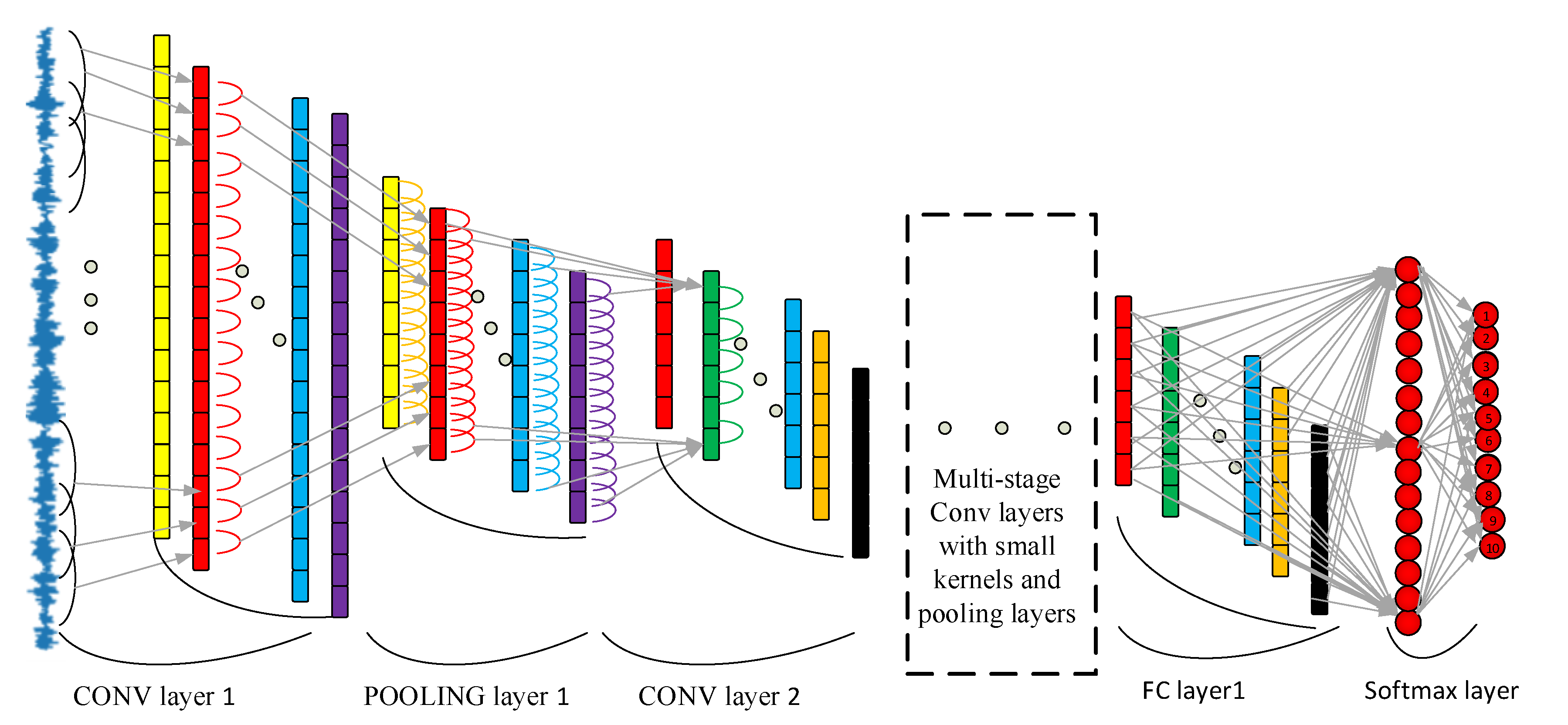
2. Architecture of the WDCNN Model
2.1. Convolutional Layer
2.2. Activation Layer
2.3. Pooling Layer
2.4. Batch Normalization
2.5. Architecture of the WDCNN Model
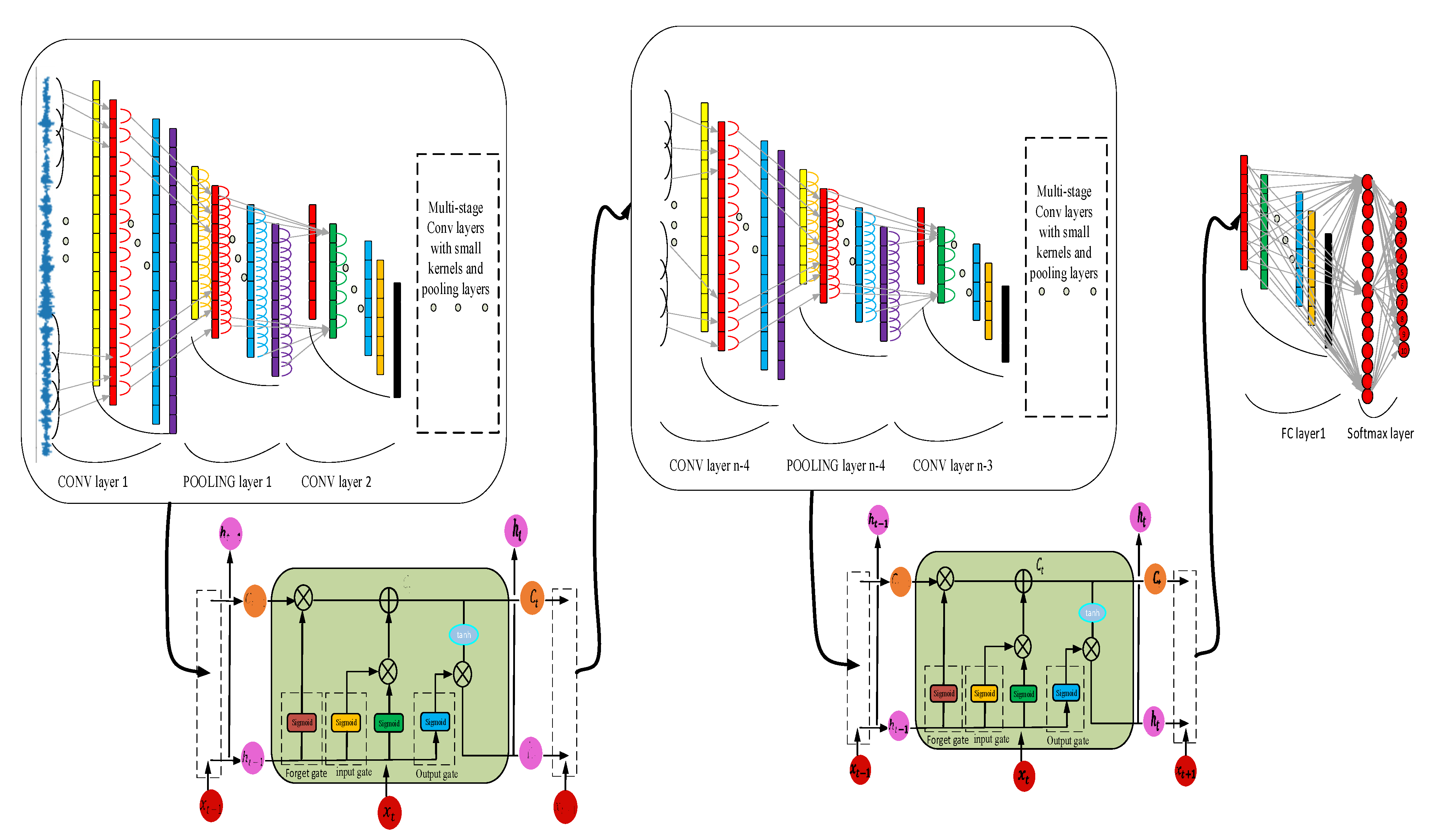
3. Long Short-Term Memory (LSTM)
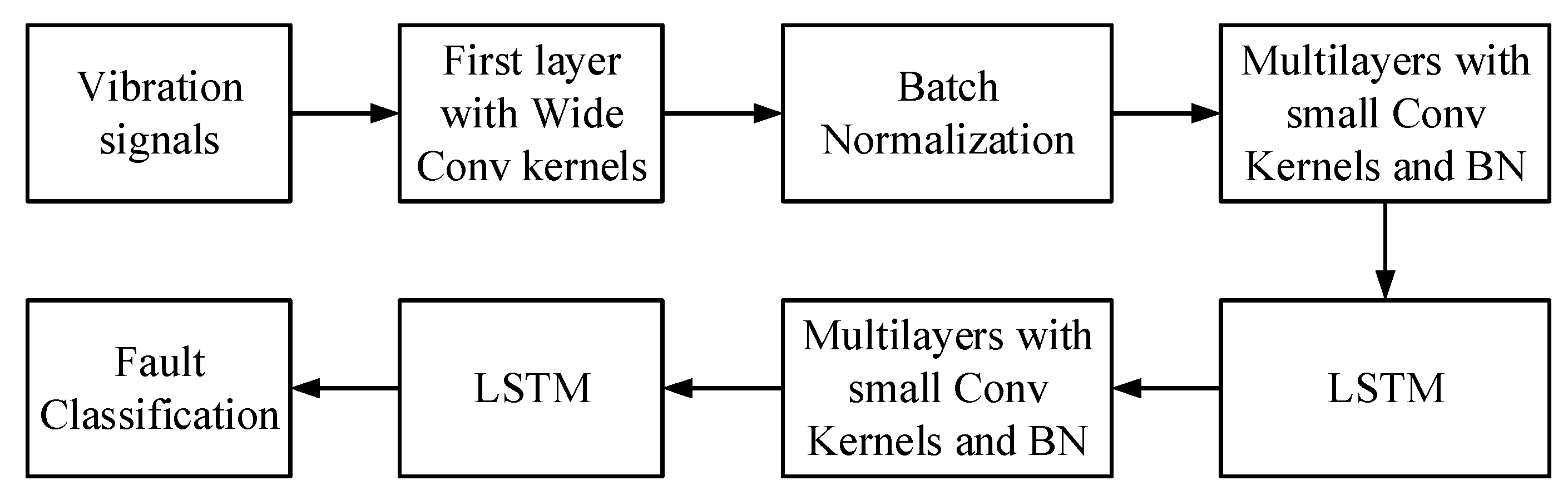
4. The Proposed Novel Hybrid Deep Learning Method
5. Experiment
5.1. Parameters of the Proposed Novel Hybrid Deep Learning Method
5.2. Feature Visualization Analysis
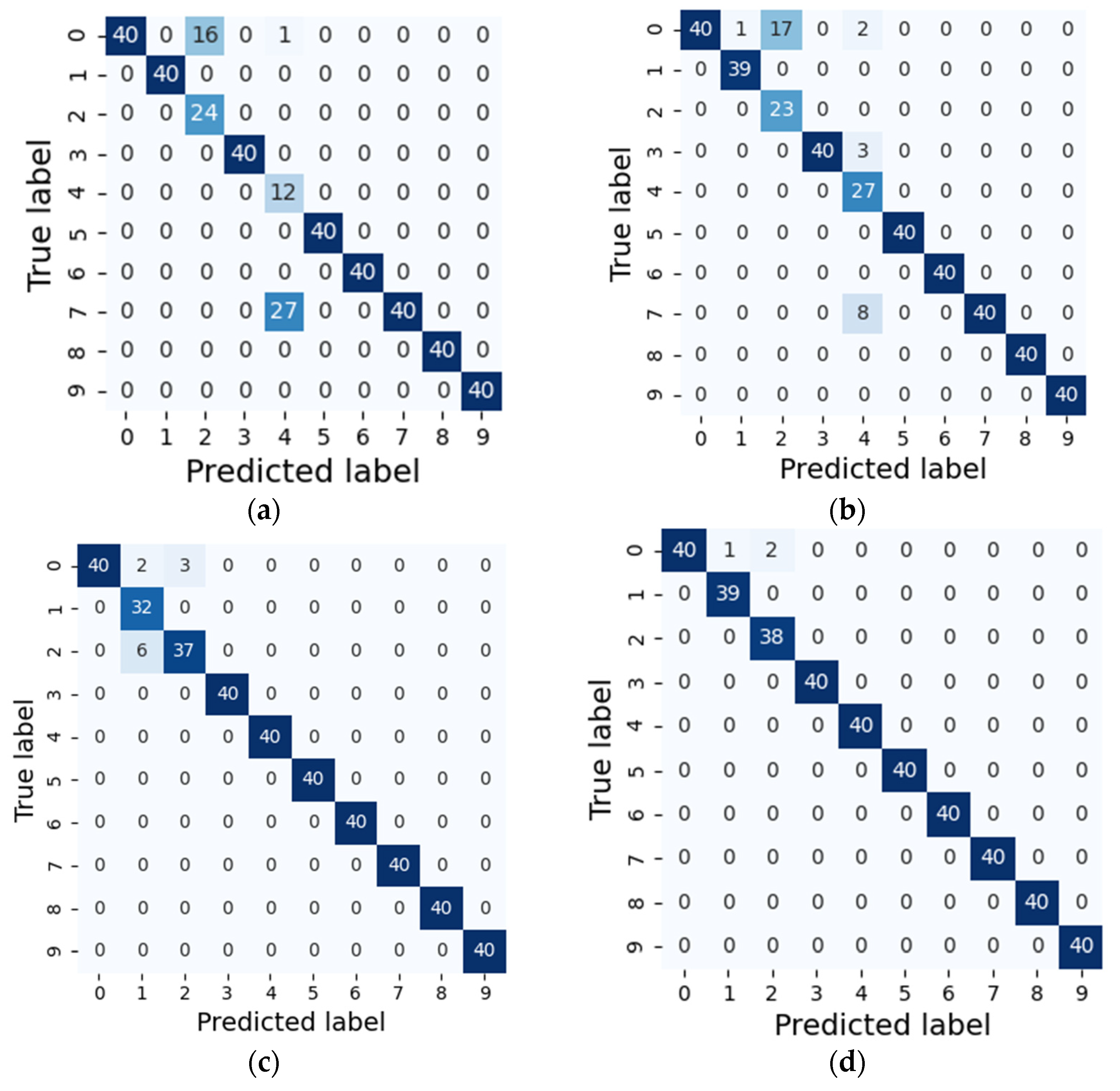
- (a)
- Dataset A: For 700 training samples and 100 testing samples, the CNN approach achieved 50% prediction accuracy, the WDCNN method was 50%, the EWDCNN method was 51%, and the proposed NHDLM method was 58%. For 1400 training samples and 200 testing samples, the CNN approach achieved 73% prediction accuracy, the WDCNN method was 70%, the EWDCNN method was 71%, and the proposed NHDLM method was 81%. For 2100 training samples and 300 testing samples, the CNN approach achieved 76% prediction accuracy, the WDCNN method was 89%, the EWDCNN method was 92%, and the proposed NHDLM method was 96%. For 2800 training samples and 400 testing samples, the CNN approach achieved 89% prediction accuracy, the WDCNN method was 92%, the EWDCNN method was 97%, and the proposed NHDLM method was 99%.
- (b)
- Dataset B: For 700 training samples and 100 testing samples, the CNN approach achieved 43% prediction accuracy, the WDCNN method was 50%, the EWDCNN method was 54%, and the proposed NHDLM method was 55%. For 1400 training samples and 200 testing samples, the CNN approach achieved 59% prediction accuracy, the WDCNN method was 64%, the EWDCNN method was 70%, and the proposed NHDLM method was 72%. For 2100 training samples and 300 testing samples, the CNN approach achieved 72% prediction accuracy, the WDCNN method was 92%, the EWDCNN method was 94%, and the proposed NHDLM method was 95%. For 2800 training samples and 400 testing samples, the CNN approach achieved 87% prediction accuracy, the WDCNN method was 94%, the EWDCNN method was 96%, and the proposed NHDLM method was 98%.
- (c)
- Dataset C: For 700 training samples and 100 testing samples, the CNN approach achieved 54% prediction accuracy, the WDCNN method was 62%, the EWDCNN method was 63%, and the proposed NHDLM method was 76%. For 1400 training samples and 200 testing samples, the CNN approach achieved 61% prediction accuracy, the WDCNN method was 83%, the EWDCNN method was 85%, and the proposed NHDLM method was 90%. For 2100 training samples and 300 testing samples, the CNN approach achieved 66% prediction accuracy, the WDCNN method was 90%, the EWDCNN method was 93%, and the proposed NHDLM method was 94%. For 2800 training samples and 400 testing samples, the CNN approach achieved 87% prediction accuracy, the WDCNN method was 94%, the EWDCNN method was 97%, and the proposed NHDLM method was 99%.
- (d)
- Dataset D: For 700 training samples and 100 testing samples, the CNN approach achieved 40% prediction accuracy, the WDCNN method was 46%, the EWDCNN method was 50%, and the proposed NHDLM method was 54%. For 1400 training samples and 200 testing samples, the CNN approach achieved 56% prediction accuracy, the WDCNN method was 80%, the EWDCNN method was 90%, and the proposed NHDLM method was 96%. For 2100 training samples and 300 testing samples, the CNN approach achieved 71% prediction accuracy, the WDCNN method was 94%, the EWDCNN method was 96% and the proposed NHDLM method was 98%. For 2800 training samples and 400 testing samples, the CNN approach achieved 90%, the WDCNN method was 96%, the EWDCNN method was 97%, and the proposed NHDLM method was 99%.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, X.; Zhang, Y.; Cheng, C.; Peng, Z. A hybrid classification autoencoder for semi-supervised fault diagnosis in rotating machinery. Mech. Syst. Signal Process. 2021, 149, 107327. [Google Scholar] [CrossRef]
- Zhang, W.; Li, C.; Peng, G.; Chen, Y.; Zhang, Z. A deep convolutional neural network with new training methods for bearing fault diagnosis under noisy environment and different working load. Mech. Syst. Signal Process. 2017, 100, 439–453. [Google Scholar] [CrossRef]
- Li, C.; Zhang, S.; Qin, Y.; Estupinan, E. A systematic review of deep transfer learning for machinery fault diagnosis. Neurocomputing 2020, 407, 121–135. [Google Scholar] [CrossRef]
- Zmarzy, P. Multi-Dimensional Mathematical Wear Models of Vibration Generated by Rolling Ball Bearings Made of AISI 52100 Bearing Steel. Materials 2020, 13, 5440. [Google Scholar] [CrossRef]
- Zhao, R.; Yan, R.; Chen, Z.; Mao, K.; Wang, P.; Gao, R.X. Deep learning and its applications to machine health monitoring. Mech. Syst. Signal Process. 2019, 115, 213–237. [Google Scholar] [CrossRef]
- Ye, Z.; Yu, J. Deep morphological convolutional network for feature learning of vibration signals and its applications to gearbox fault diagnosis. Mech. Syst. Signal Process. 2021, 161, 107984. [Google Scholar] [CrossRef]
- Yang, J.; Xie, G.; Yang, Y.; Zhang, Y.; Liu, W. Deep model integrated with data correlation analysis for multiple intermittent faults diagnosis. ISA Trans. 2019, 95, 306–319. [Google Scholar] [CrossRef]
- Mauricio, Z.C.A.; Li, W.; Gryllias, K. A Deep Learning method for bearing fault diagnosis based on Cyclic Spectral Coherence and Convolutional Neural Networks. Mech. Syst. Signal Process. 2020, 140, 106683. [Google Scholar]
- Wang, X.; Mao, D.; Li, X. Bearing fault diagnosis based on vibro-acoustic data fusion and 1D- CNN network. Measurement 2021, 173, 108518. [Google Scholar] [CrossRef]
- Zhang, W.; Peng, G.; Li, C. A New Deep Learning Model for Fault Diagnosis with Good Anti-Noise and Domain Adaptation Ability on Raw Vibration Signals. Sensors 2017, 17, 425. [Google Scholar] [CrossRef]
- He, Z.; Shao, H.; Zhong, X.; Zhao, X. Ensemble transfer CNNs driven by multi-channel signals for fault diagnosis of rotating machinery cross working conditions. Knowl.-Based Syst. 2020, 207, 106396. [Google Scholar] [CrossRef]
- Plakias, S.; Boutalis, Y.S. Fault detection and identification of rolling element bearings with Attentive Dense CNN. Neurocomputing 2020, 405, 208–217. [Google Scholar] [CrossRef]
- Wang, J.; Miao, J.; Wang, J.; Yang, F.; Tsui, K.-L.; Miao, Q. Fault Diagnosis of Electrohydraulic Actuator Based on Multiple Source Signals: An Experimental Investigation. Neurocomputing 2020, 417, 224–238. [Google Scholar] [CrossRef]
- Han, H.; Wang, H.; Liu, Z.; Wang, J. Intelligent vibration signal denoising method based on non-local fully convolutional neural network for rolling bearings. ISA Trans. 2021, in press. [Google Scholar] [CrossRef]
- Chen, Z.; Gryllias, K.; Li, W. Mechanical fault diagnosis using Convolutional Neural Networks and Extreme Learning Machine. Mech. Syst. Signal Process. 2019, 133, 106272. [Google Scholar] [CrossRef]
- Xiang, S.; Qin, Y.; Zhu, C.; Wang, Y.; Chen, H. Long short-term memory neural network with weight amplification and its application into gear remaining useful life prediction. Eng. Appl. Artif. Intell. 2020, 91, 103587. [Google Scholar] [CrossRef]
- Lei, J.; Liu, C.; Jiang, D. Fault diagnosis of wind turbine based on Long Short-term memory networks. Renew. Energy 2019, 133, 422–432. [Google Scholar] [CrossRef]
- Hao, S.; Ge, F.X.; Li, Y.; Jiang, J. Multisensor Bearing Fault Diagnosis Based on One-dimensional Convolutional Long Short-Term Memory Networks. Measurement 2020, 159, 107802. [Google Scholar] [CrossRef]
- Shi, J.; Peng, D.; Peng, Z.; Zhang, Z.; Goebel, K.; Wu, D. Planetary gearbox fault diagnosis using bidirectional—Convolutional LSTM networks. Mech. Syst. Signal Process. 2022, 162, 107996. [Google Scholar] [CrossRef]
- Zhou, D.; Zhuang, X.; Zuo, H. A hybrid deep neural network based on multi-time window convolutional bidirectional LSTM for civil aircraft APU hazard identification. Chin. J. Aeronaut. 2021, in press. [Google Scholar] [CrossRef]
- Gao, B.; Huang, X.; Shi, J.; Tai, Y.; Zhang, J. Hourly forecasting of solar irradiance based on CEEMDAN and multi-strategy CNN-LSTM neural networks. Renew. Energy 2020, 162, 1665–1683. [Google Scholar] [CrossRef]
- He, Z.; Sha, H.; Cheng, J.; Zhao, X.; Yang, Y. Support tensor machine with dynamic penalty factors and its application to the fault diagnosis of rotating machinery with unbalanced data. Mech. Syst. Signal Process. 2020, 141, 106441. [Google Scholar] [CrossRef]
- Qin, C.; Shi, G.; Tao, J.; Yu, H.; Jin, Y.; Lei, J.; Liu, C. Precise cutterhead torque prediction for shield tunneling machines using a novel hybrid deep neural network. Mech. Syst. Signal Process. 2021, 151, 107386. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load (hp) | Fault Types | Fault Diameters | Training/Testing |
|---|---|---|---|
| 0, 1, 2, 3 | NC | 0 | 700/100, 1400/200, 2100/300, 2800/400 |
| 0, 1, 2, 3 | BF | 7 | 700/100, 1400/200, 2100/300, 2800/400 |
| 0, 1, 2, 3 | BF | 14 | 700/100, 1400/200, 2100/300, 2800/400 |
| 0, 1, 2, 3 | BF | 21 | 700/100, 1400/200, 2100/300, 2800/400 |
| 0, 1, 2, 3 | IF | 7 | 700/100, 1400/200, 2100/300, 2800/400 |
| 0, 1, 2, 3 | IF | 14 | 700/100, 1400/200, 2100/300, 2800/400 |
| 0, 1, 2, 3 | IF | 21 | 700/100, 1400/200, 2100/300, 2800/400 |
| 0, 1, 2, 3 | OF | 7 | 700/100, 1400/200, 2100/300, 2800/400 |
| 0, 1, 2, 3 | OF | 14 | 700/100, 1400/200, 2100/300, 2800/400 |
| 0, 1, 2, 3 | OF | 21 | 700/100, 1400/200, 2100/300, 2800/400 |
| No. | Layer Type | Kernel Size/Stride | Kernel Number |
|---|---|---|---|
| 1 | Convolution1 | 64 × 1 | 16 |
| 2 | Pooling1 | 2 × 1 | 16 |
| 3 | Convolution2 | 3 × 1 | 32 |
| 4 | Pooling2 | 2 × 1 | 32 |
| 5 | Convolution3 | 3 × 1 | 64 |
| 6 | Pooling3 | 2 × 1 | 64 |
| 7 | LSTM | units = 16 | |
| 8 | Convolution4 | 3 × 1 | 64 |
| 9 | Pooling4 | 2 × 1 | 64 |
| 10 | Convolution5 | 3 × 1 | 64 |
| 11 | Pooling5 | 2 × 1 | 64 |
| 12 | Convolution6 | 3 × 1 | 64 |
| 13 | Pooling6 | 2 × 1 | 64 |
| 14 | LSTM | units = 16 | |
| 15 | Fully connected | 100 | 1 |
| 16 | Softmax | 10 | 1 |
| Data Set | Training/Testing | CNN | WDCNN | EWDCNN | Proposed Method |
|---|---|---|---|---|---|
| 700/100 | 0.5 | 0.5 | 0.51 | 0.58 | |
| A | 1400/200 | 0.73 | 0.7 | 0.71 | 0.81 |
| 2100/300 | 0.76 | 0.89 | 0.92 | 0.96 | |
| 2800/400 | 0.89 | 0.92 | 0.97 | 0.99 | |
| 700/100 | 0.43 | 0.5 | 0.54 | 0.55 | |
| B | 1400/200 | 0.59 | 0.64 | 0.7 | 0.72 |
| 2100/300 | 0.72 | 0.92 | 0.94 | 0.95 | |
| 2800/400 | 0.87 | 0.94 | 0.96 | 0.98 | |
| 700/100 | 0.54 | 0.62 | 0.63 | 0.76 | |
| C | 1400/200 | 0.61 | 0.83 | 0.85 | 0.9 |
| 2100/300 | 0.66 | 0.9 | 0.93 | 0.94 | |
| 2800/400 | 0.87 | 0.94 | 0.97 | 0.99 | |
| 700/100 | 0.4 | 0.46 | 0.5 | 0.54 | |
| D | 1400/200 | 0.56 | 0.8 | 0.9 | 0.96 |
| 2100/300 | 0.71 | 0.94 | 0.96 | 0.98 | |
| 2800/400 | 0.9 | 0.96 | 0.97 | 0.99 |
| Method | Time Consumption | Overall Classification |
|---|---|---|
| (Training Size/2800 Samples) | (Second) | Result (%) |
| CNN | 14.595 | 87% |
| WDCNN | 23.311 | 94% |
| EWDCNN | 22.166 | 96% |
| NHDLM | 30.636 | 98% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Kim, C.H.; Kim, J.-M. A Novel Hybrid Deep Learning Method for Fault Diagnosis of Rotating Machinery Based on Extended WDCNN and Long Short-Term Memory. Sensors 2021, 21, 6614. https://doi.org/10.3390/s21196614
Gao Y, Kim CH, Kim J-M. A Novel Hybrid Deep Learning Method for Fault Diagnosis of Rotating Machinery Based on Extended WDCNN and Long Short-Term Memory. Sensors. 2021; 21(19):6614. https://doi.org/10.3390/s21196614
Chicago/Turabian StyleGao, Yangde, Cheol Hong Kim, and Jong-Myon Kim. 2021. "A Novel Hybrid Deep Learning Method for Fault Diagnosis of Rotating Machinery Based on Extended WDCNN and Long Short-Term Memory" Sensors 21, no. 19: 6614. https://doi.org/10.3390/s21196614
APA StyleGao, Y., Kim, C. H., & Kim, J. -M. (2021). A Novel Hybrid Deep Learning Method for Fault Diagnosis of Rotating Machinery Based on Extended WDCNN and Long Short-Term Memory. Sensors, 21(19), 6614. https://doi.org/10.3390/s21196614