1. Introduction
Rotational seismology and seismometry are relatively new seismological disciplines dealing with rotational ground motions. Since their establishment in the 2000s, they have been attracting increased attention in the seismological community [
1,
2]. For a broader state-of-the-art review, please refer to the companion paper by Brokešová and Málek, this issue [
3].
In this paper, by seismic rotation, we mean rotation rate
directly related to the curl of ground velocity
. In the right-handed Cartesian coordinate system
(
x-axis positive to the East,
y-axis positive to the North,
z-axis positive upwards, the origin on the Earth’s surface), ground velocity
can be decomposed into three translational components
,
, and
. Seismic rotation
is then decomposed into rotational components
,
, and
, which represent rotation rates around the corresponding coordinate axes. At the Earth’s surface, the expressions for them simplify thanks to the free-surface boundary conditions and they read
According to the sign convention we have adopted, rotation rates are positive counter-clockwise in accordance with the right-handed ’rule of thumb’, as suggested by Evans [
4].
Distant-source seismic wavefields can usually be approximated by plane waves that propogate along the Earth’s surface with an apparent velocity
c. Under the assumption of a single plane wave, seismic rotational and translational components are related to each other via well known rotation-to-translation relations (R-TRs) [
5,
6,
7], the simplest in the rotated Cartesian coordinates
, with
being the radial axis (along the surface, positive in the wave propagation direction) and
being the transverse axis (along the surface, parallel to the wavefront and complementing the coordinates to a right-handed system). The distant-source R-TRs relate the rotation rate components to the components of ground acceleration
(time derivative of
) and read
These R-TRs have been widely applied in many studies in order to determine propagation direction (true back azimuth) [
8], apparent phase velocity
c [
7], or even to estimate Love-wave velocity dispersion [
9], with all of that from a single station measurement. Those studies utilized records of rotational rates from teleseismic earthquakes that were measured by the so-called ring-laser gyroscopes [
10,
11] based on the Sagnac effect [
12]. Ring lasers are very sensitive rotational sensors that dominated rotational seismometry in the 2000s, and new and more capable instruments of this type are still being constructed—an example is the large four-component ROMY ring laser that was installed in 2017 at the Geophysical Observatory in Fürstenfeldbruck (GOF) near München (Germany) under the auspices of Ludwig-Maximilians-Universität München [
13,
14,
15]. However, a disadvantage of such highly sensitive rotational sensors is their very costly installation, operation, and maintenance. They are not designed for field deployment. Portable, field-deployable rotational sensors that are based on different physical principles started to appear, especially in the last decade, being developed independently by various scientific teams or companies [
16,
17,
18,
19]. The authors of this paper have been developing the so-called Rotaphones [
3,
20,
21,
22,
23,
24], also falling into this category, since 2008. However, there is a very important feature discriminating Rotaphone from the other field-deployable seismic rotational sensors: Rotaphone, despite its name, is a six-component (6C) instrument that was designed for recording both rotational and translational components by one and the same device. Moreover, in the 6C Rotaphone records, rotation rates are free of translational velocities and vice versa. Among various model designs, Rotaphone-CY is the latest one and its performance is the focus of the present study.
There is no principal reason not to employ Equation (
2) for rotational data from portable, field-deployable sensors, whenever the plane wave assumption is justified. Moreover, they offer another application, not much exploited up to now: verifying the recorded rotational waveforms against the acceleration waveforms (that are unquestionable, as they are recorded by classical seismographs that are used in traditional seismology).
Most, if not all, portable, field-deployable, rotational sensors are clearly much less sensitive than the ring-laser gyroscopes, which predestinates them to be deployed at local/regional distances (i.e., to record ground motions from relatively proximal sources). However, for a proximal source, the plane wave assumption may not be acceptable. Brokešová and Málek [
25] derived generalized R-TRs under the assumption of a spherical wave generated by a directional point source. In addition to the ground acceleration terms, those relations also contain ground velocity terms, which, in general, cannot be neglected at a small epicentral distance and/or at higher frequencies and/or in regions of rapid changes of amplitudes. The generalized R-TRs read
The coefficients are specified by Brokešová and Málek [
25]. For this study, it is sufficient to note that
,
and the remaining coefficients are related to spatial derivatives of amplitude and/or (in the case of
and
) to the wavefront curvature. Based on the authors’ experience, the presence of velocity terms in R-TRs is often manifested by a time shift between the left-hand and right-hand sides of the equations. Thus, R-TRs still can help to verify the rotational records, although they are only approximate in inhomogeneous media.
The onset of various portable rotational sensors has given rise to field and laboratory experiments that aimed at comparing their records with those of ring-lasers or among themselves [
3,
18,
26,
27]. In November 2019, an extensive comparative rotation sensor test experiment was organized at GOF. The experiment is described by Bernauer et al. [
28], in this issue. More than twenty field-deployable rotational sensors were involved, including four Rotaphone-CY instruments that were, however, in a development stage at that time. A part of the development phase is a precise calibration of Rotaphone as a system of elemental sensors (geophones), without which the Rotaphone records are not correct. The calibration phase was originally scheduled to have taken place in the specialized USGS Albuquerque Seismological Laboratory (ASL), U.S.A., equipped with excellent facilities for the purpose, in April 2020. The envisaged calibration of the four Rotaphone-CY instruments at ASL could not be conducted due to the severe restrictions adopted worldwide as a response to the COVID-19 pandemic in 2020. As a substitute solution of the situation, the facilities that are available at the Institute of Rock Structure and Mechanics, Czech Academy of Sciences (Prague, Czech Republic) have been used instead of the ASL specialized equipment. Those facilities are able to calibrate Rotaphone-CY only up to ∼20 Hz, far below the upper frequency limit of the instrument. Thus, at the time of writing this paper, the Rotaphone records must be considered as preliminary, by reason of the frequency range limitation, which is incapable of a full-fledged comparison with records from the other rotational sensors involved in the GOF experiment. Only a limited-extent comparison can be shown in this journal issue [
28]. The final results will be published elsewhere once the calibration is completed.
The present study focuses on a comparison of records from the GOF experiment among the four Rotaphones-CY as well as on their verification either with the help of R-TRs or the method of array-derived rotations (ADR) [
29,
30]. The companion paper describes the ADR method in detail, including its severe applicability limitations [
3].
2. Rotaphone-CY
Rotaphones are mechanical sensor systems that are capable of measuring six components of seismic ground motion: three orthogonal translational components (ground velocities) and three rotation rates around the same three axes. Rotaphones have been developed since 2008 and they exist in various model designs, of which Rotaphone-CY is the latest one. The basic idea underlying the design of the instruments is that they measure spatial ground velocity gradients by means of differential motions that were recorded by parallel pairs of elemental sensors (geophones) that are separated by a distance that is two or three orders of magnitude smaller than the wavelength of the measured wavefield. The separation distance is typically few tens of cm and so only high-sensitivity geophones, thoroughly calibrated, allow for such differential sensing. The geophones are mounted to a rigid (metal) frame that is anchored to the ground. The whole instrument is supposed to move as a rigid body when seismic waves are passing through the site. For a detailed description of the Rotaphone principle, please refer to the companion paper [
3] or older papers [
20,
21,
23,
25].
Even though the elemental geophones that are used in the system (in one Rotaphone instrument) are of the same type, made by the same manufacturer or even belonging to the same batch, their instrument characteristics (response functions) are never exactly identical and equal to the manufacturer-specified response of the given geophone type. Even small variations in response functions may significantly influence the differences in records over such a small separation distance. Thus, an accurate and careful calibration of the individual geophones and the whole instrument is unavoidable. It consists of two parts. First, in-lab pre-calibration that can be done only once for the given sensor and that makes it possible to compensate for the most significant differences in individual responses. This pre-calibration was not completed at the time of writing this paper for an objective reason of the strict ban on travelling related to COVID-19 and only a preliminary pre-calibration up to ∼20 Hz was used instead. Second, the so-called in-situ calibration was performed simultaneously with data processing, thus being an integral part of each measurement. The in-situ calibration [
21,
25] relies on the redundancy of rotational records thanks to the arrangement of geophone pairs on the frame (more than one pair for each rotational component) and rigidity of the frame. This type of calibration is not less important than the pre-calibration, as it can compensate for fine differences due to varying physical conditions at the site (temperature, air pressure, humidity, magnetic field variations, etc.) and to geophone aging.
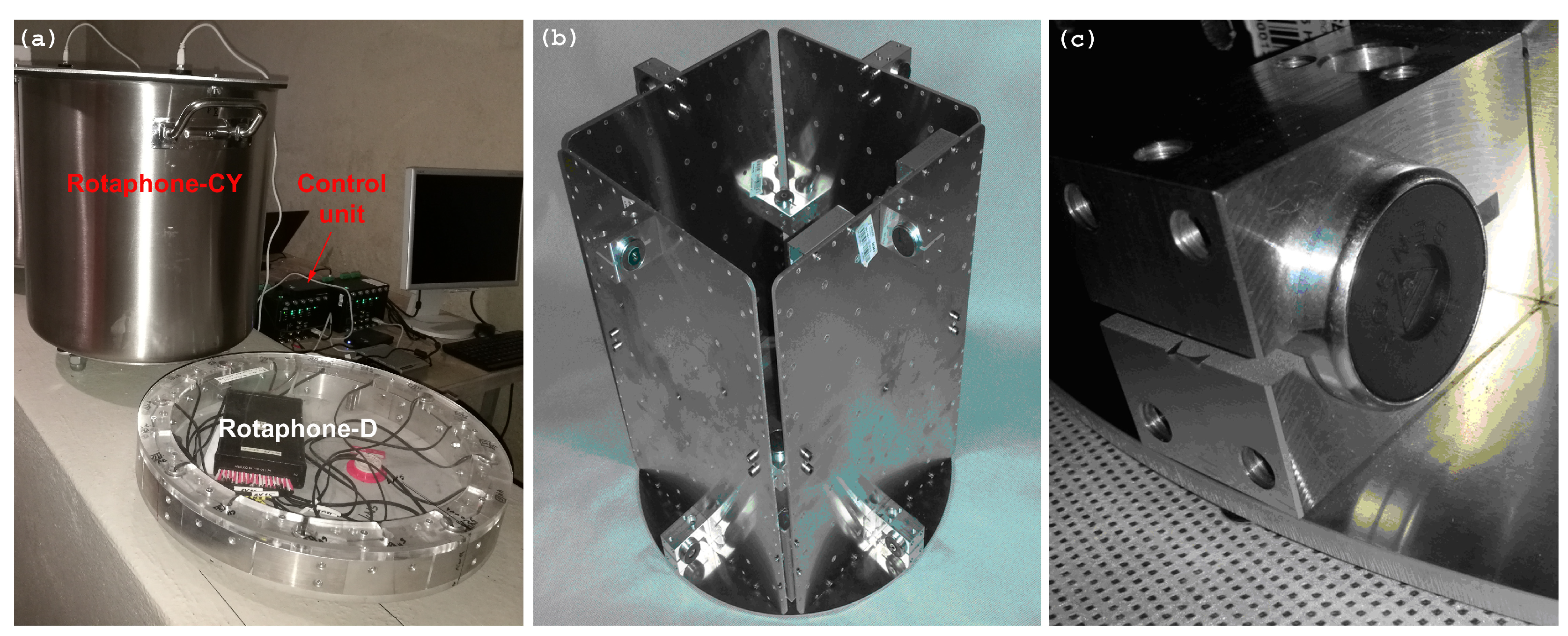
Figure 1 shows Rotaphone-CY, together with the preceding model design, 6C Rotaphone-D. It contains two pairs of vertical geophones and four pairs of horizontal geophones (SM-6 by ION Sensor Nederland b.v.) that are attached to the inner frame (
Figure 1b,c), arranged in an analogous way as in the older model, Rotaphone-C [
22], as shown in the companion paper [
3] (Figure 4 in that paper). Its normalized transfer function, both translational ground velocity and rotation rate, is also the same (Figure 5 in the companion paper [
3]). When comparing the latest model Rotaphone-CY to the older design, Rotaphone-C, the main differences are (1) geophones SM-6 with higher sensitivity, (2) a 16-channel 32-bit A/D transducer by Embedded Electronics & Solutions, Ltd., and (3) a compact and waterproof cylindrical housing.
Table 1 presents the parameters of the instrument that is derived from the manufacturer specifications. The upper frequency limit is given by the frame’s natural frequency (first resonance mode frequency), because only up to this frequency the frame moves as a rigid body. As mentioned above, at the time of writing this paper, the upper limit had to be reduced to ∼20 Hz because of the incomplete in-lab pre-calibration. The lower limit represents the manufacturer-specified lower frequency limit of the geophones. It will be examined while utilizing a specialized equipment of ASL as soon as the external circumstances allow.
The resolutions shown in
Table 1 are derived from the geophone sensitivity and the parameters of the A/D transducer. The values are only theoretical and noise-free. In reality, noise is always present, both natural and instrument-related.
5. Discussion and Conclusions
Four prototypes of the newest Rotaphone design, Rotaphone-CY, were involved in the GOF experiment. They underwent both the huddle and field-deployment testing. The results in the present study are regarded as preliminary due to only provisional and incomplete laboratory pre-calibration of the instruments. Nevertheless, the results are very promising and they indicate potentially good functionality of the instruments based on indirect and direct evidence.
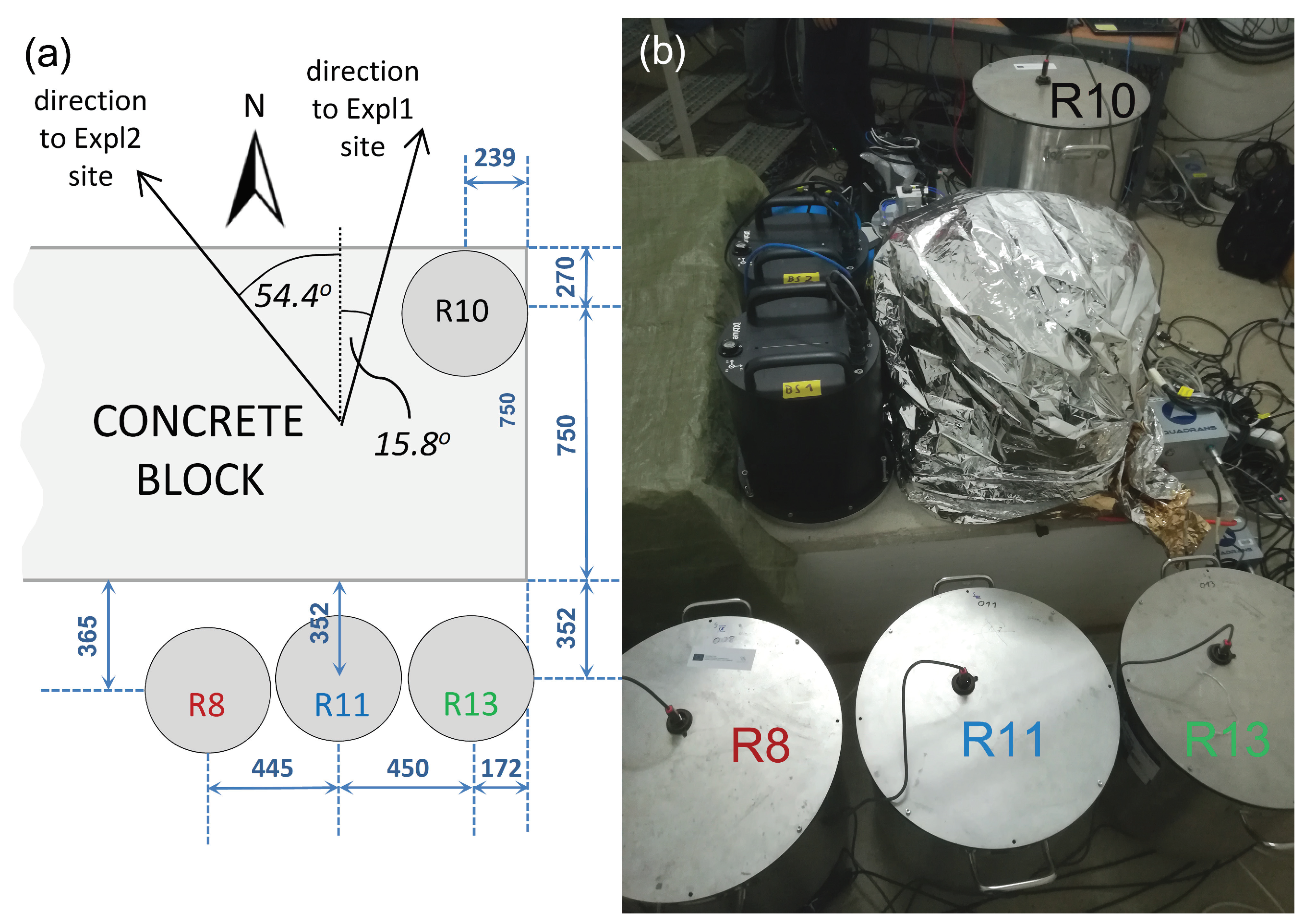
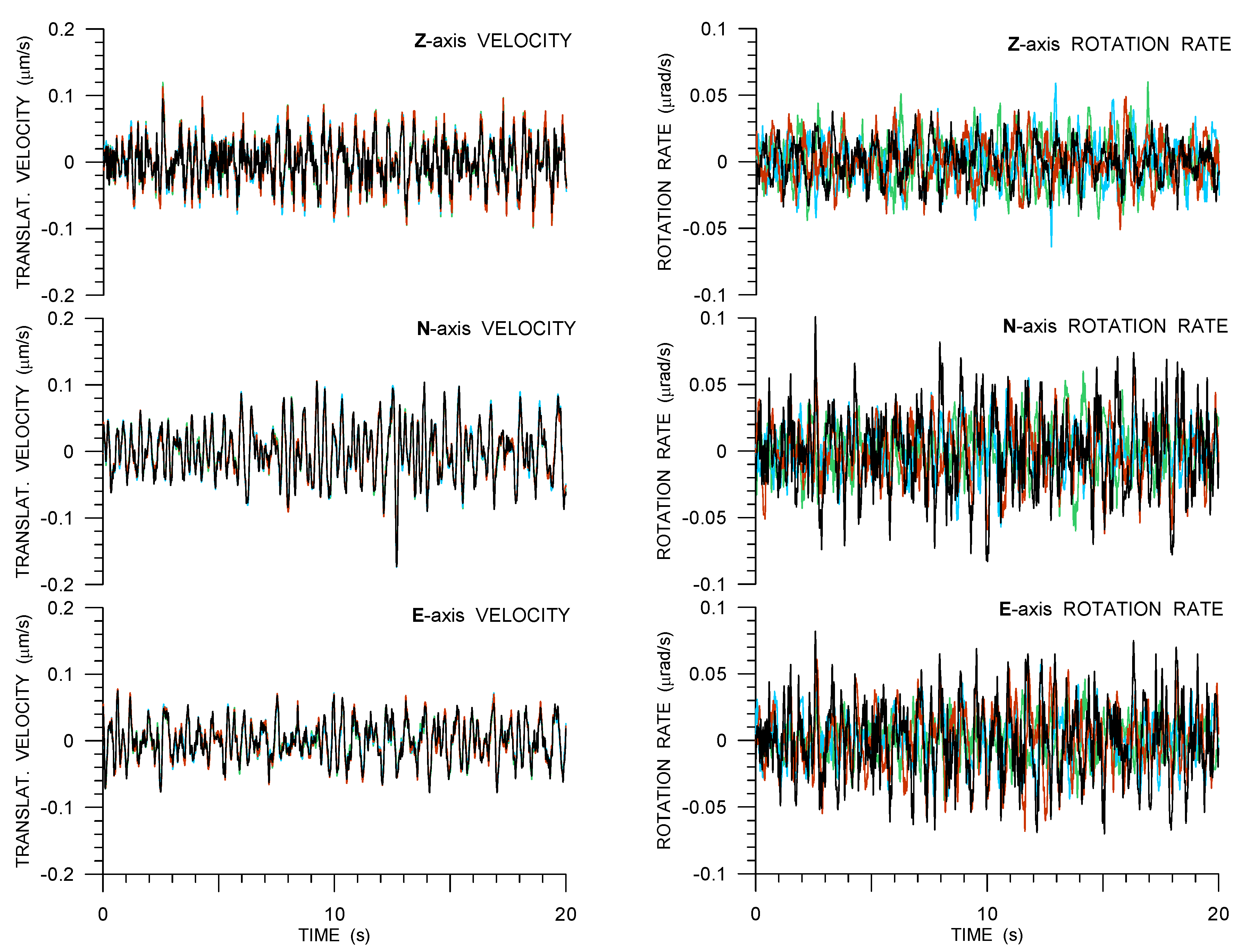
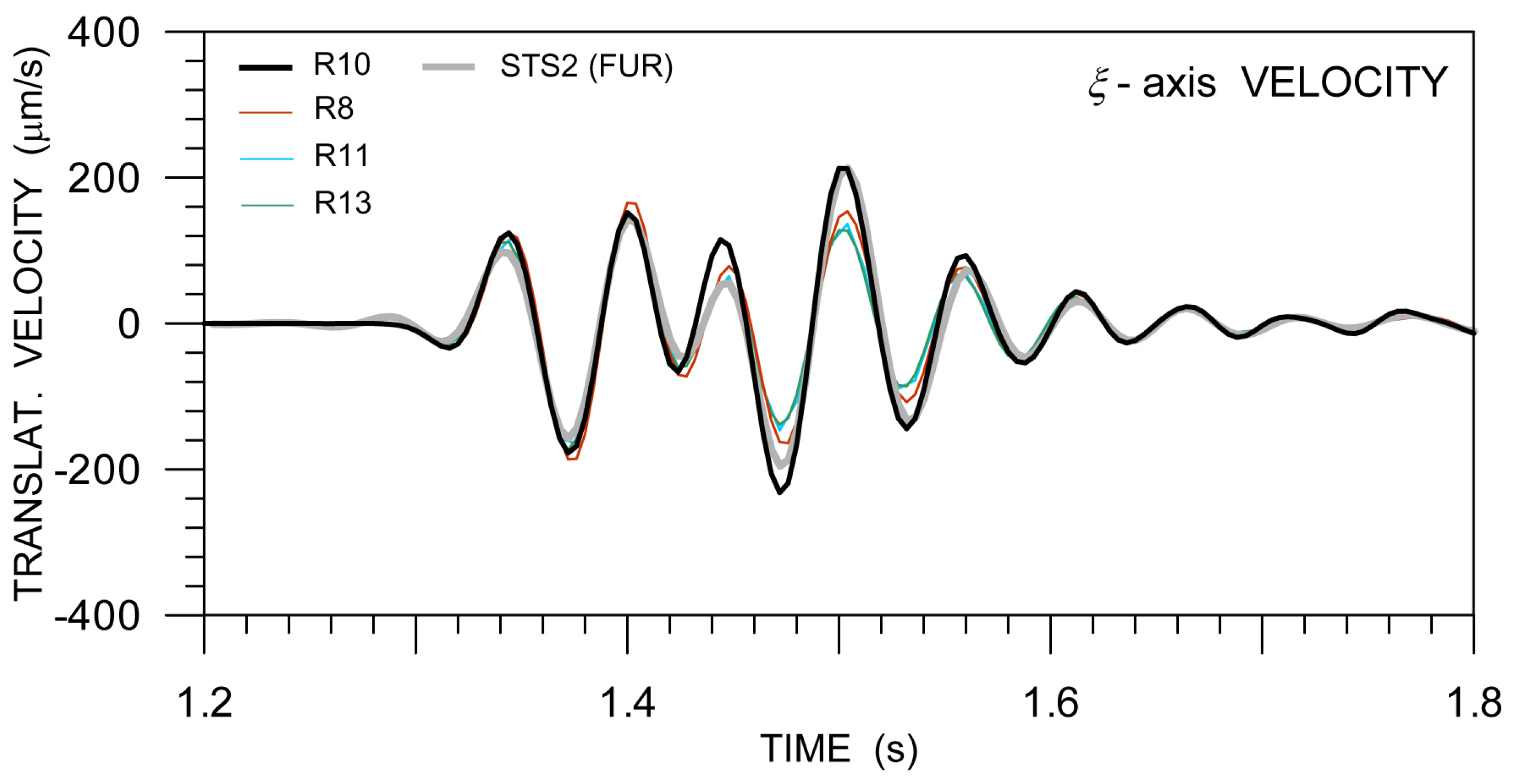
The huddle test took place in the shallow vault, in which the FUR broad-band station (German Regional Seismic Network) is situated. During the huddle test, all of the four prototypes (R8, R10, R11, and R13) were fully functional. One of them, R10, was installed on top of a concrete block that was detached from the vault building at a distance of about 60 cm from the STS2 sensor of the FUR station. The remaining three stood on the ground side by side along the longer side of the block, about 45 cm from each other at distances of 110–130 cm from R10. The translational records from all of the instruments slightly, but visibly differ, which we interpret as a result of deformation of the vault (normal modes) due to seismic wave passage. As expected, the records from R10 deviate the most, especially in the radial component (direction towards the explosion site). A comparison of the R10 records with the records from STS2 instrument at FUR, filtered to the same short-period range of 1–20 Hz (
Figure 14), shows a good fit. Thus, although deviating so much from the others, we consider the R10 records to be reliable and we conclude that the differences reflect the different deployment conditions. Naturally, differences in translational components affect differences in rotational components (spatial gradients). Those mutual rotation-rate differences are even more significant; again, the most significant differences are observed for R10. Nothing implies that the R10 rotational records are incorrect. They look very similar to the records from the instruments installed on the same concrete block by other research groups, as shown by Bernauer et al. in this issue [
28] (
Figure 12 in that paper). Removing R10 from further considerations, mutual differences between rotational records from the other three Rotaphones can also be easily attributed to the normal modes of the vault. However, some of the Rotaphone rotational records match those from the other Rotaphones very well—examples may be Expl2 horizontal (
- and
axes) rotation rates from R8, R11, and R13 (the correlation coefficient reaches 0.974 in
-component) as well as Expl1 horizontal rotation rates from R8 and R11 (the correlation coefficient is 0.917 in
-component). We evaluate the Rotaphone-CY performance in the huddle test as very convincing.
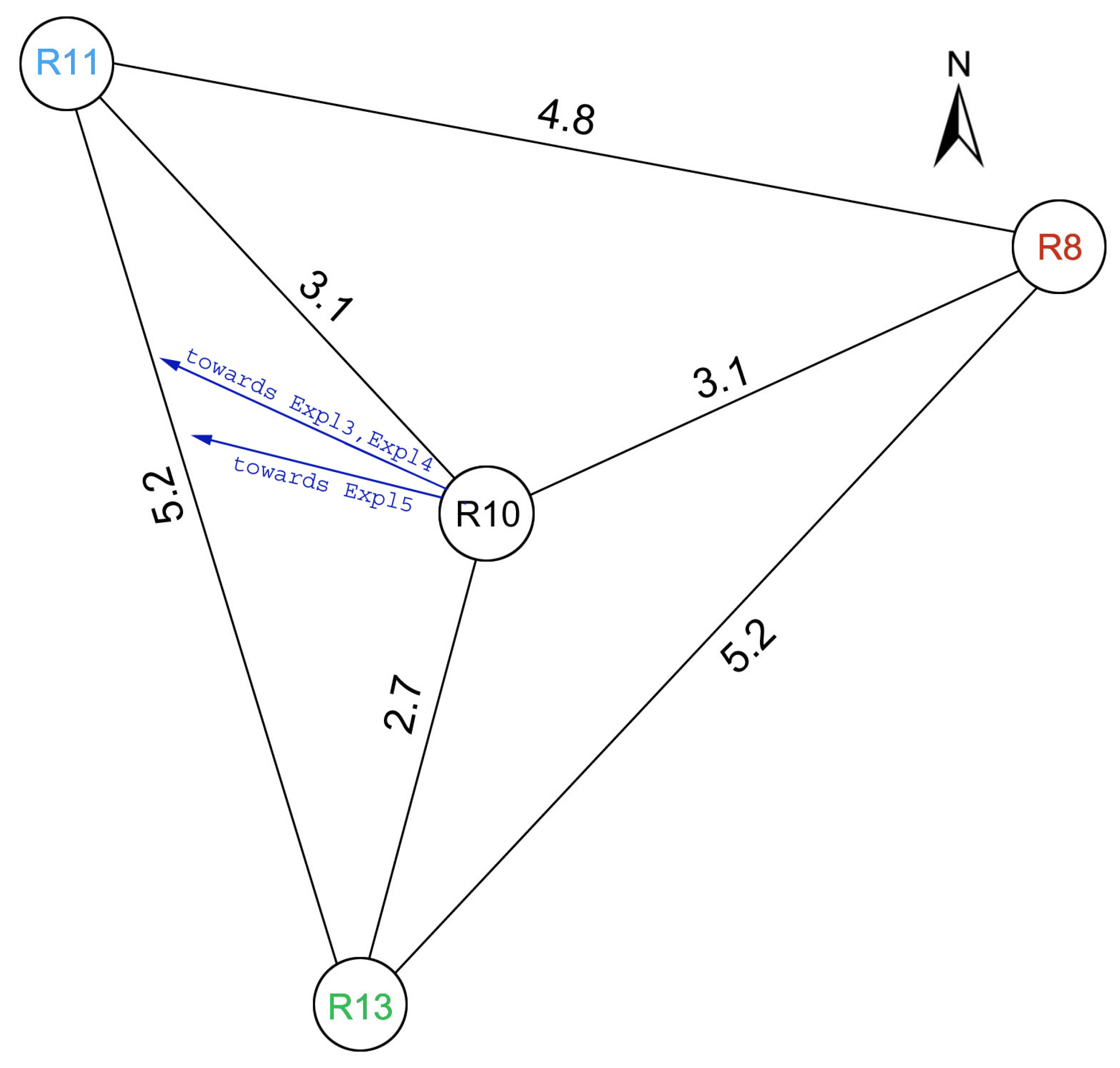
In the field-deployment part of the GOF experiment, all of the Rotaphones were moved out of the vault and installed in a small-aperture triangular array with R10 at the center in order to record ground motions from three small-size explosions. Unfortunately, one of the vertical geophones of the R10 geophone system stopped working properly and it had to be excluded from the subsequent data processing. The exclusion of one geophone from R10 does not affect its translational records. However, it causes the rotational records, particularly rotation rates around horizontal axes (i.e., the - and -components), in order to display incorrect amplitudes.
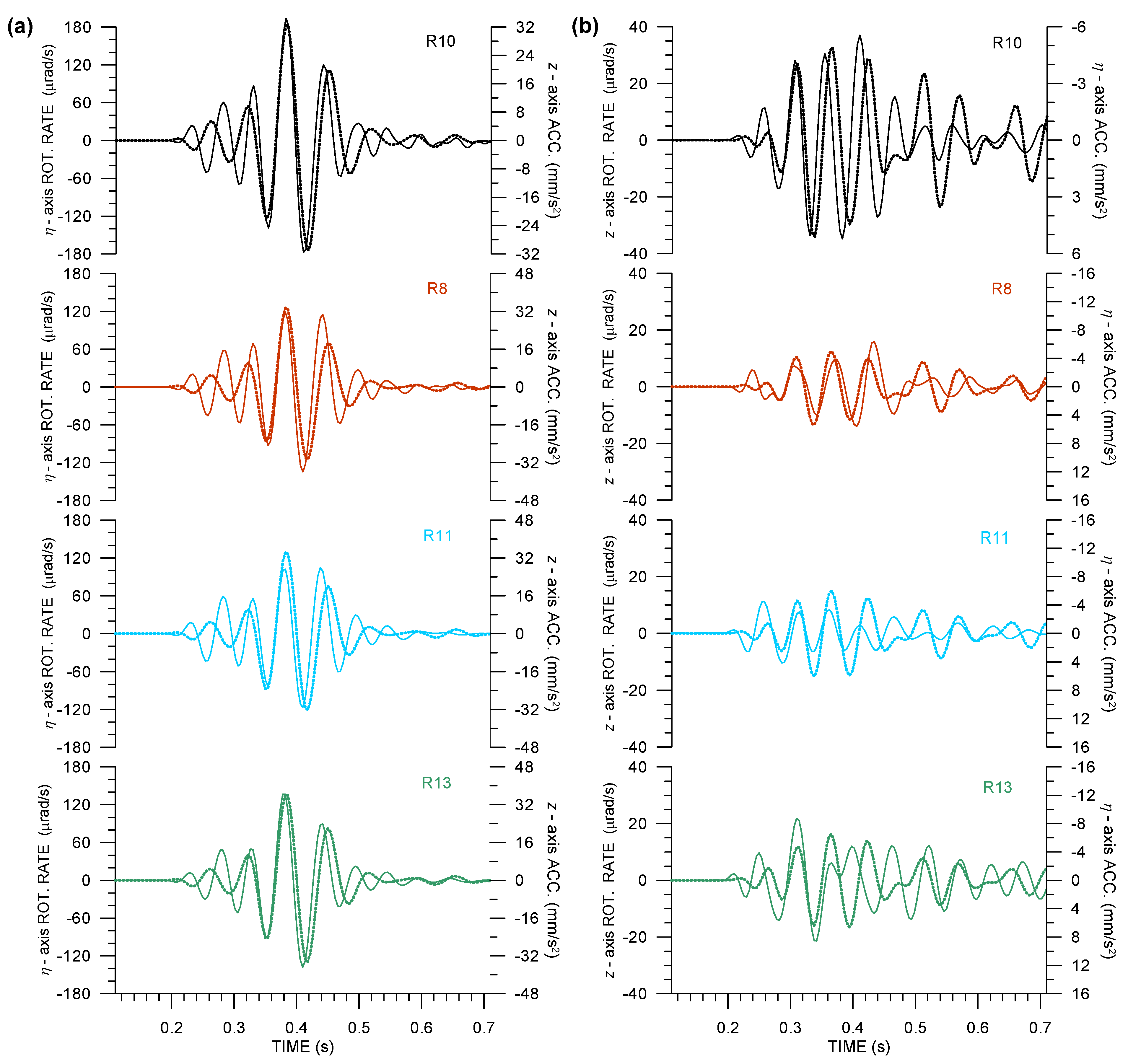
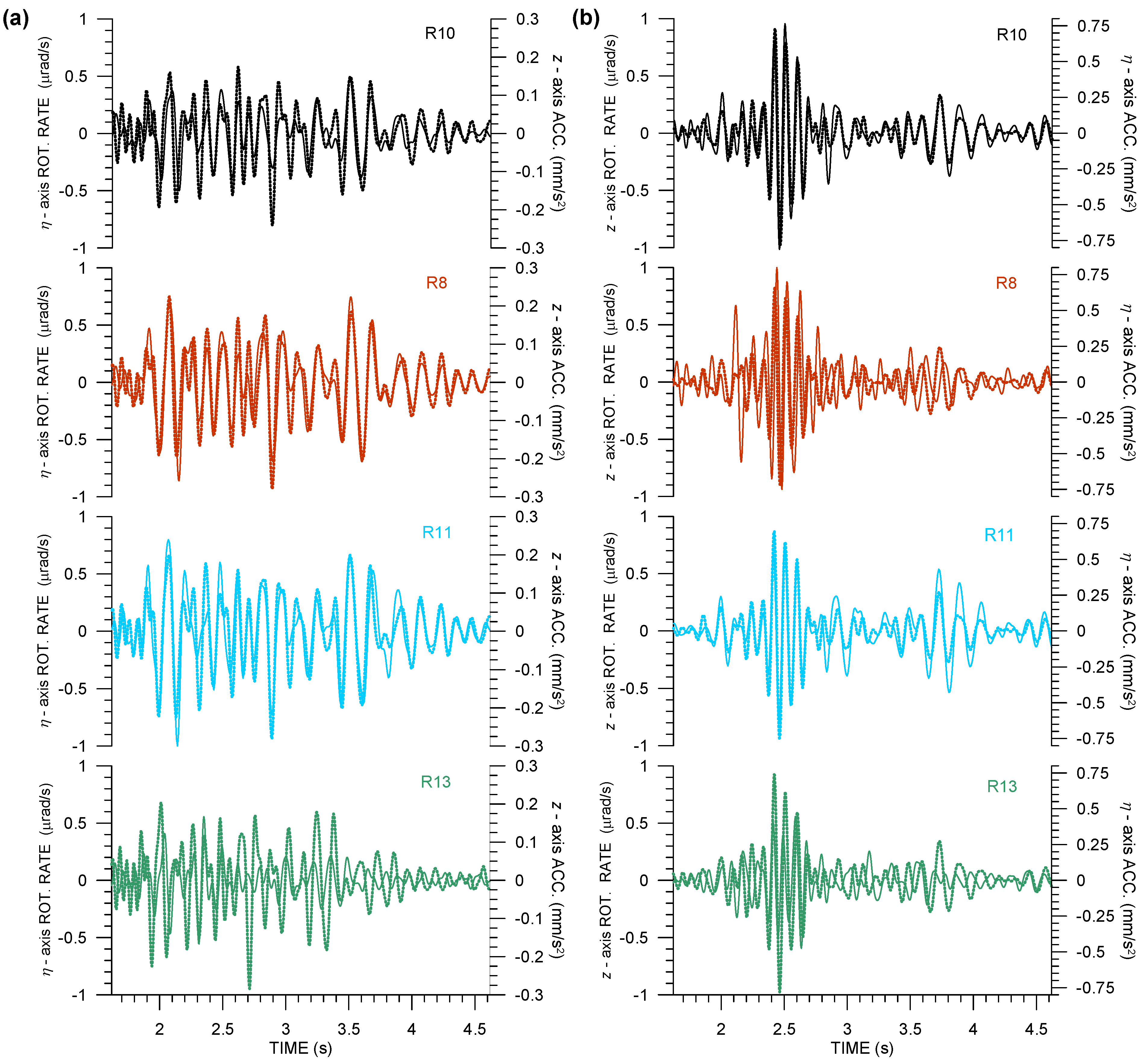
The translational data that were produced by Rotaphones are undoubtedly correct, as they are based on direct measurement by geophones, standard short-period ground velocity sensors that have been used by seismologists in seismic prospecting and for various industrial applications for decades. The novelty of our approach lies in the measurements of rotational components that need to be checked (and that is why the GOF experiment was organized). Our 6C data offer the possibility to verify the rotational rates, at least in part, by matching them to the proper acceleration components measured at exactly the same point (not only measured by a seismograph standing nearby, as it is a common practice), as suggested by the R-TRs that are described by Equations (
2) or (
3). It is important to note that a poor or no fit does not imply that the rotational records are incorrect, because the real R-TRs in an inhomogeneous medium may differ significantly from those that are described by the given equations. On the other hand, a good fit means that (1) the real R-TRs at the site correspond well to those predicted by Equations (
2) or (
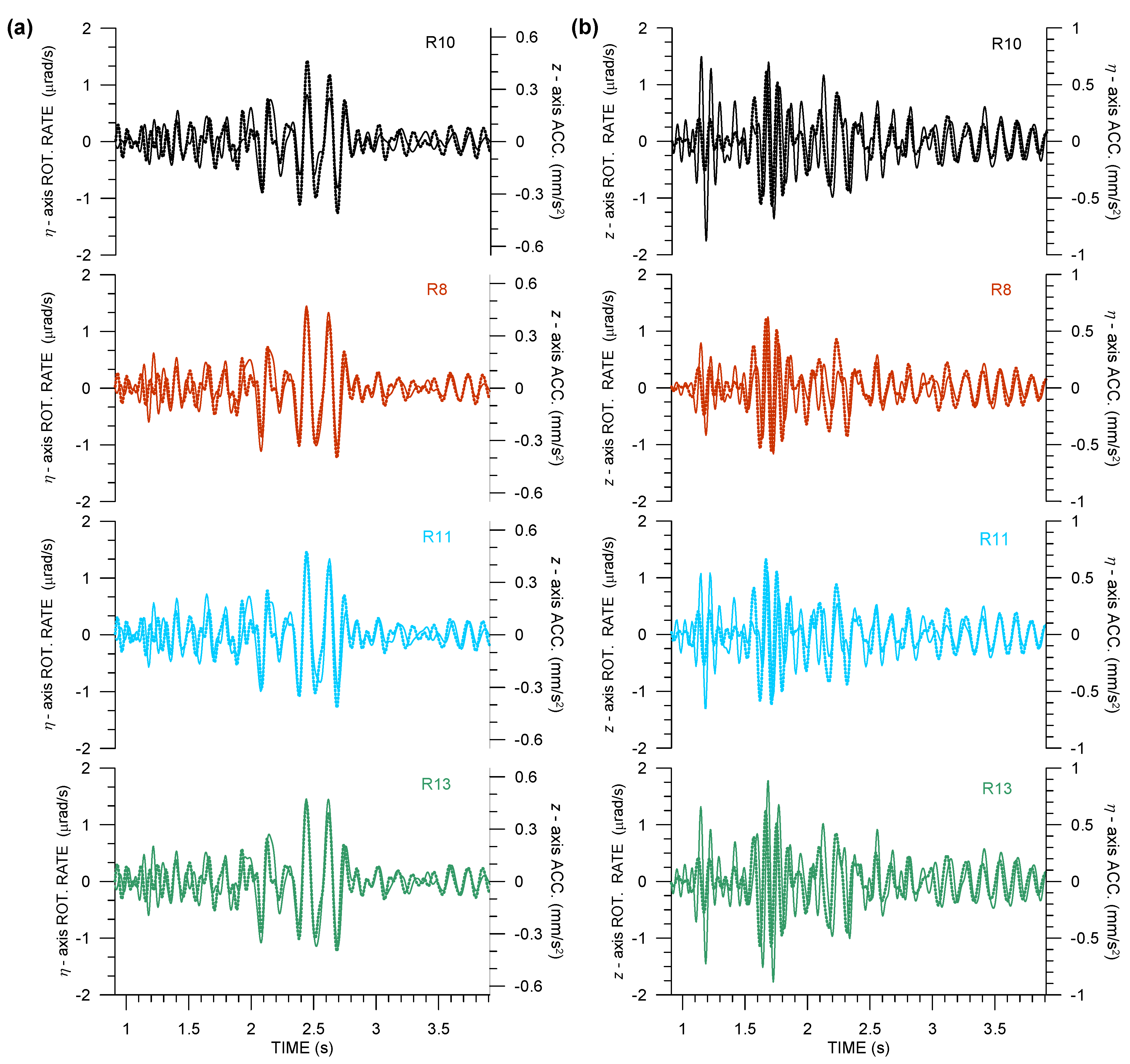
3) and (2) the relevant rotation waveforms are correct in shape. Thus, when a good fit is observed at least in parts of the seismograms, we can consider it to be an indication of correctly measured rotational components. One may, perhaps, argue that the rotational and acceleration components in question are not independent as it follows from the equations and, moreover, both originate from the same geophone measurement. However, the components are dependent only in theory: for a plane wave in a homogeneous structure. In reality, while taking the way they are deduced (averaging and simple time derivative vs. finite differencing within the geophone pairs) into account, they can be viewed as fully independent quantities and they can be used to verify the rotation rate data. A good match between the transverse rotation rate and vertical acceleration was found for the dominant wave from Expl2, dominant wave (mainly Rayleigh wave Airy phase), and later Rayleigh wave phases from Expl3 and Expl4, and most parts of seismograms of R8 and R11 from Expl5. Note that the appropriateness of the transverse rotational rate means that both horizontal components are correct, as the
-component comes from the original north and east components. Thus, the radial component is also reliable to the extent in which the transverse component matches vertical acceleration. The radial component could be either close to zero, as predicted by Equation (
2) and seen in the case of Expl2, or it could be proportional to vertical velocity, as predicted by Equation (
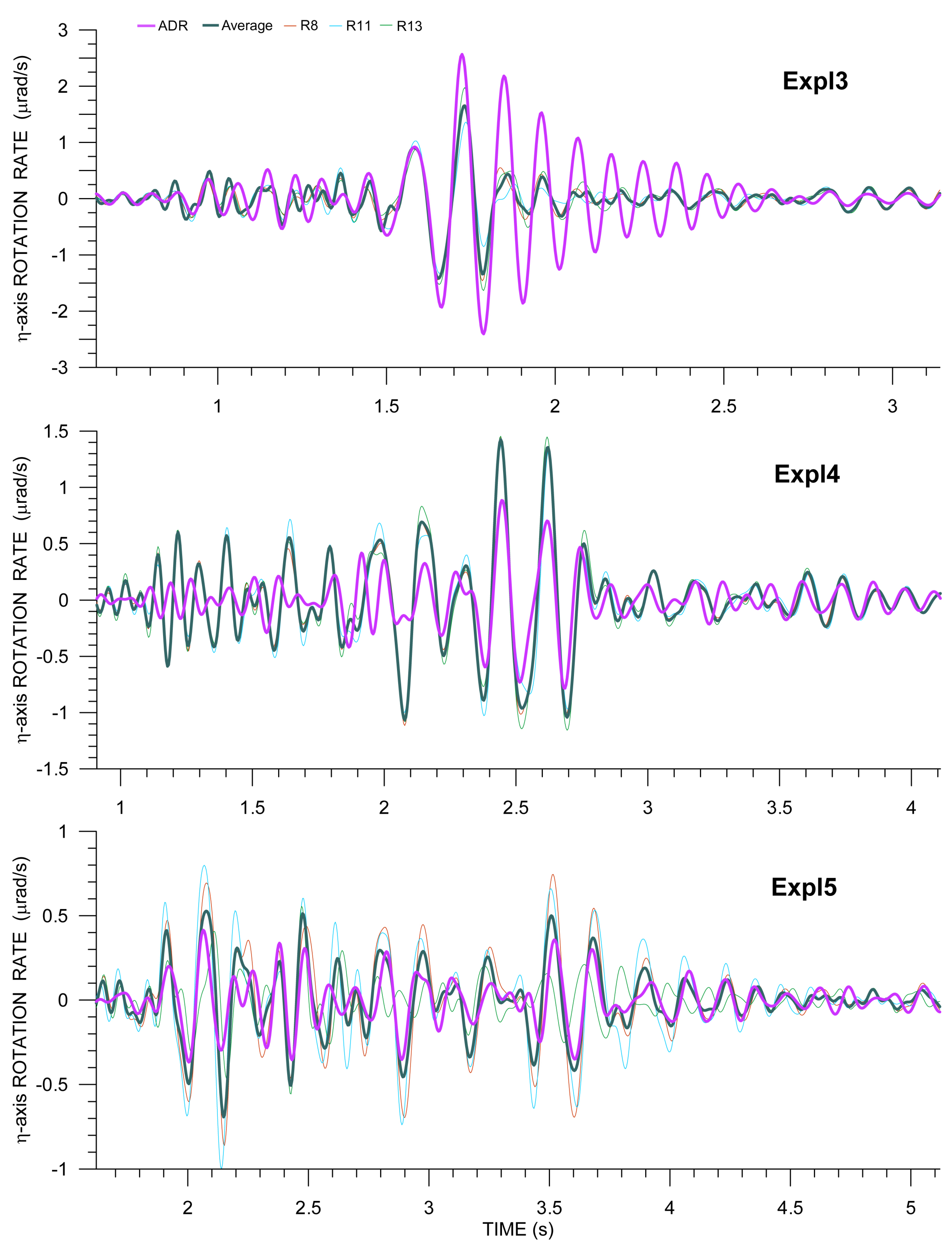
3). Indeed, although
and
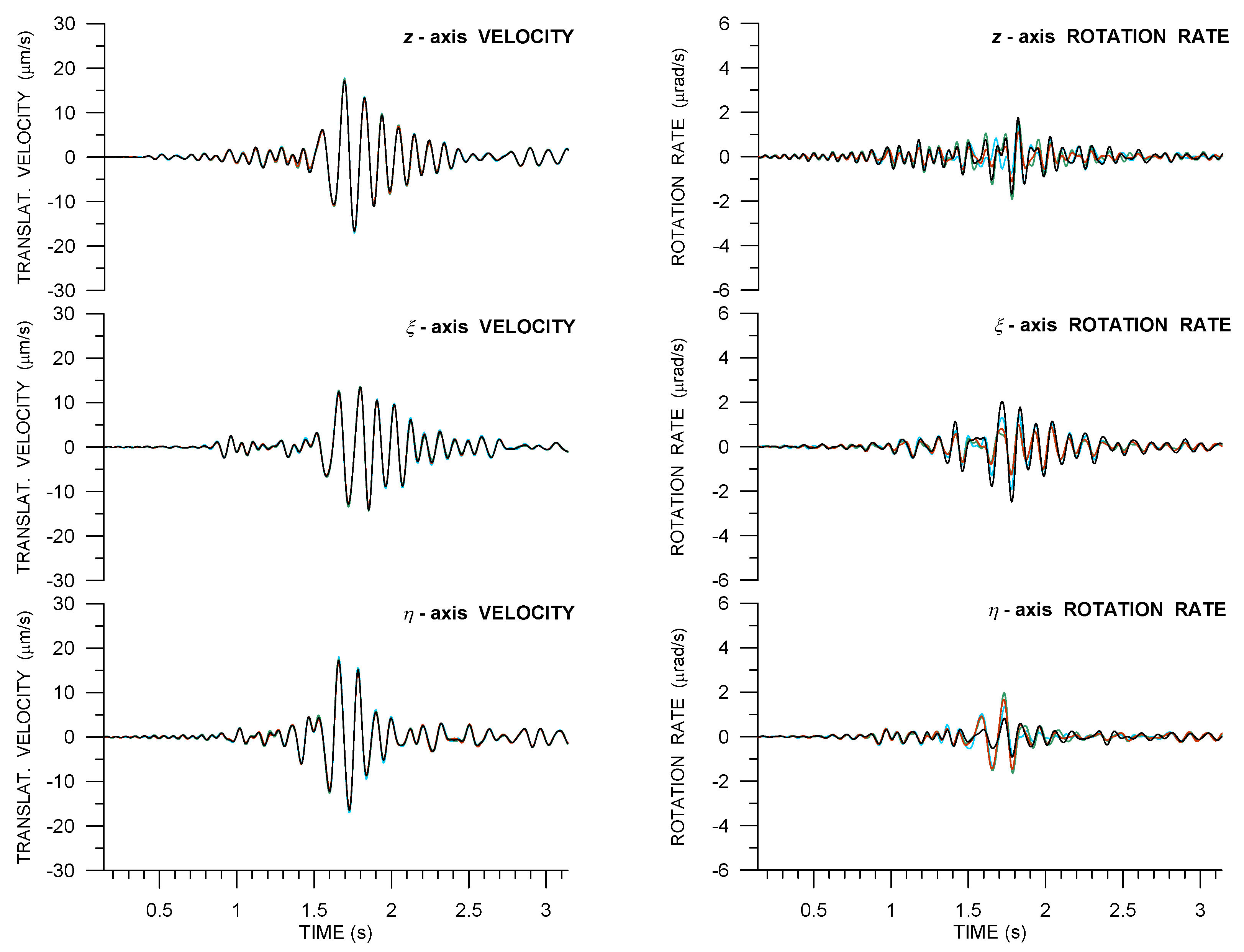
are not explicitly compared in the presented figures, it will not be difficult for the reader to see the shape similarity between the two components in the figures of 6C records, namely, in the wavetrains after 1.6 s from Expl3 (
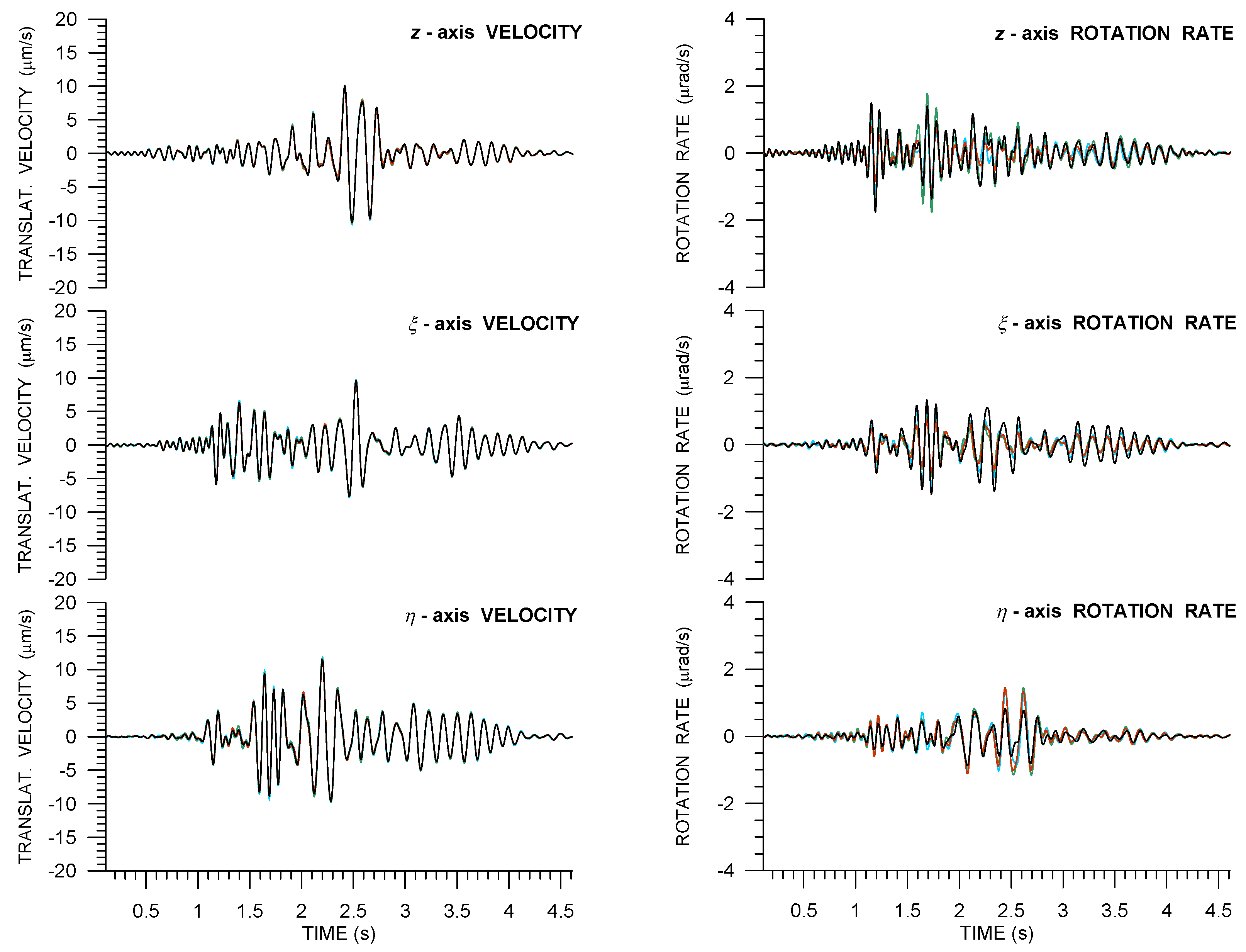
Figure 8) and after 2.3 s from Expl4 (
Figure 9). All of these wavetrains belong to Rayleigh waves (including the Airy phases). The vertical rotation rate partly matches the transverse acceleration (as predicted by Equations (
2) or (
3), bottom) in the assumed Love-wave Airy phase and in later Love wave phases from Expl4 and Expl5 (
Figure 10 and
Figure 11), except R13 for Expl5.
In the cases of a good match of the waveforms that are predicted by Equation (
2), it was possible to roughly estimate the apparent (along the Earth’s surface) phase velocity
c. For this purpose, we used the
ratio. For the sake of the best accuracy, we restricted ourselves to the strongest waves in the
seismograms and took the ratio for the acceleration peak value, because, at that time, the possible
-proportional term (Equation (
3)) vanishes. This is one of the reasons why we preferred the
over the
, as
may not vanish at the peak times of
. In fact, the presence of
-proportional terms in the R-TRs is manifested by the noticeable phase shift between
and
detected for all the explosions, see, e.g.,
Figure 5 (R10 only),
Figure 10 and
Figure 11. In order to obtain the most representative estimates of
c, we calculated the mean value and the standard deviation from all of the Rotaphones in the huddle test and from R8, R11, and R13 in the field measurement. A slightly higher phase velocity estimate than expected for surface waves in unconsolidated sediments was obtained for Expl3. The reason may be that the dominant surface-wave phase is mixed with later arrivals of S waves at a near-normal incidence (e.g., reflected from the background). Such waves would naturally have a much higher apparent phase velocity. This hypothesis is consistent with the lower
c estimate for the more distant Expl4. Another explanation may be that the transverse (
) rotation rate component, being defined with respect to the geometrical back azimuth of the explosion, is not actually the transverse one, i.e., the true back azimuth for the given seismogram phase is different. Based on our experience, the true back azimuth may change very rapidly in time. The hypothesis is supported by the relatively strong radial (
) rotation rate component of the wave in question, especially for R11. In principle, the apparent phase velocity can be also estimated from the time shifts between the individual Rotaphones in the array. However, the time shifts are very small, which significantly affects the accuracy of the estimate. The accuracy also decreases with decreasing amplitudes. Thus, we consider such an estimate as tolerably reliable, only for Expl3, for which it is 447 ± 133 m/s. The error intervals of this estimate and the estimate from the
ratio overlap substantially, which indirectly supports the conclusion that the horizontal rotation rates are measured correctly.
The criterion of the strongest wave was, in principle, met by different waves for different explosions. While it was the peak value in the surface wave group (predominantly the Airy phase) in the records from Expl3 and Expl4, for Expl5 we calculated the amplitude ratio for a wave in the S-wave group, probably the wave that is guided along the Earth’s surface. Taking into account the depth resolution of the rotation-rate based phase velocity estimates, which is approximately one wavelength [
25,
31,
32], and the fact that we estimated the wavelength to be ∼30 m long for Expl5, then the estimated
c is, in fact, approximately equivalent to the
parameter (average S-wave velocity for the topmost 30 m) used commonly in seismic engineering in order to classify soils. Our estimate of 311 ± 27 m/s corresponds to ground type C according to Eurocode 8 [
33]. The stratigraphic profile of this ground typeis fully consistent with the geological setting at the site.
The main purpose of any comparative experiment is to compare the results from different instruments. In the present paper, we limit ourselves to only comparing records from the four Rotaphones-CY involved in the experiment, especially in its field-deployment phase. In the triangular array, despite the frequent overall similarities documented by relatively high correlation coefficient values, we observe small differences in amplitudes of translational components and more significant differences in amplitudes of rotational components, even when their waveforms are very similar (they are in phase). The differences in translational components vary from ∼2% in the records of Expl3 to ∼20% for Expl5. Such differences can be easily explained by local differences in structure beneath the individual Rotaphones. Even if we adopt the plane-wave approximation locally, such local inhomogeneities are copied into the effectively averaged structure parameters, thanks to the relatively short wavelength (in our case, the effect may be most pronounced for Expl5 because of the least wavelength estimate). Subsequently, maintaining the energy flux per unit area across the wavefront, a change in the effective wave velocity (or better, wave impedance, the product of velocity and density) by ∼1% leads to a change in amplitude of ground displacement (as well as velocity or acceleration) by ∼2% because the expression for the flux is quadratic in amplitude. We consider the anticipated local inhomogeneities that could be responsible for the observed differences in the translational amplitudes to be realistic. Rotational components (as spatial gradients) are much more sensitive to such local inhomogeneities than translational ones. The rotational components that were provided by Rotaphones in the array differed in peak amplitudes by 5% up to several tens of %, depending on the type of wave and explosion position. In fact, seismic rotational components can visibly change over a distance as short as, e.g., 2 m [
3] or even shorter, as documented by other participants of the GOF experiment [
34]. Firstly, this calls the frequent experimental arrangement of collocated rotational and translational measurements into question, where instruments stand side-by-side at some distance and not at exactly one point and, secondly, it reduces the informative value of comparative measurements targeted by the GOF experiment. On the other hand, differences in rotational components measured over a short distance may be a tool for detecting significant local inhomogeneities under the Earth’s surface.
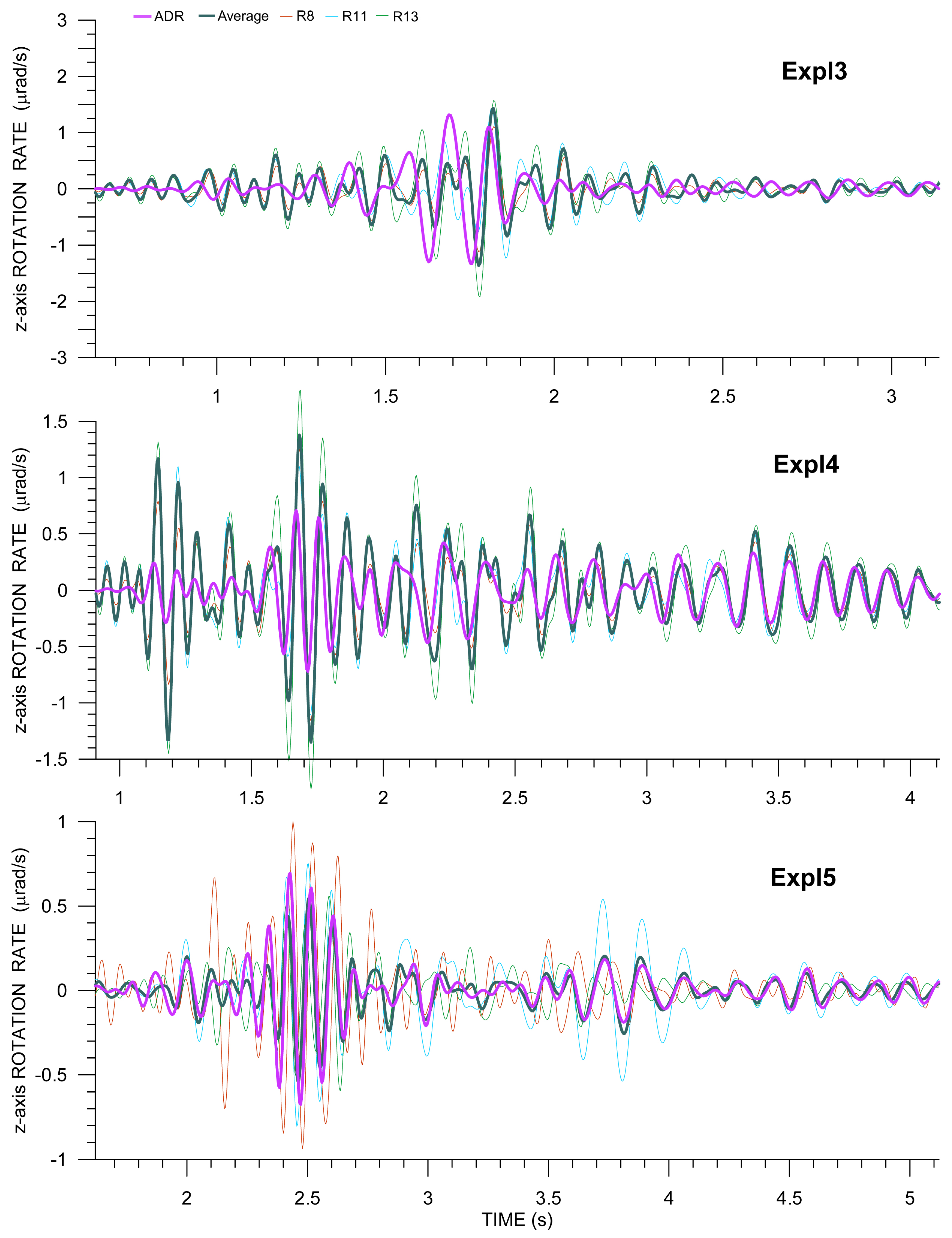
The above-mentioned mutual differences in Rotaphone records indicate that the rotation rate (i.e., spatial gradient of ground velocity) is not uniform across the array. Its uniformity is an essential assumption on which the ADR method is based. Moreover, the central-position Rotaphone R10 was out of order for rotational measurements around the
- and
-axes. Thus, it is open to discussion as to whether to apply the method to our array measurement. We are inclined to think that this makes sense when comparing ADR with the average of rotation rates measured locally by R8, R11, and R13 Rotaphones. Both the ADR results and the average from local rotational measurements represent averaged rotation rates characteristic for the place occupied by the array but those quantities are independent given the way in which they were obtained. The Rotaphone measurements are based on differencing translational records from geophones that are placed very close to each other within one instrument (moving as a rigid body), which produces rotation rates that are then averaged over the array. In contrast, the ADR method is based on differencing translational records from geophones (with no rigid connection between them) that are mounted on instruments located much further apart (in our case by one order of magnitude) while implicitly assuming a plane wave passing through the array. The comparison of the directly measured rotations (or their average) with the ADR results is evaluated the same way as their comparison with the corresponding acceleration, see the discussion above. A good fit cannot be just a coincidence and it means that both the ADR and Rotaphone results should be correct. On the other hand, a bad or no fit does not necessarily imply the incorrectness of the Rotaphone rotational measurements, as there are many other factors at play. Despite the considerable handicaps of both methods (insufficient calibration on the one hand and application on the edge of applicability on the other), we obtained a surprisingly good match of results for some of the records or their parts. This is all the more surprising when considering that we work here in a high-frequency range (up to 15 Hz). As far as we know, comparisons of ADR with directly measured rotations published so far have been limited to frequencies that are well below 1 Hz [
26,
27], except for the companion paper [
3]. Overall, we consider the comparison of rotational data from Rotaphones-CY with the ADR results to be very satisfactory.
To summarize, although the Rotaphones-CY that are involved in the GOF experiment have not yet been properly pre-calibrated in a laboratory equipped for the purpose (and so the results that are presented here have to be regarded as only preliminary), all four instruments passed the testing very well. The results suggest that their rotation rate records are roughly correct in the range up to 15 (or even 20) Hz. This assessment is based on both indirect indications (mutual similarity of their records or good correlation with the respective acceleration components) and, in part, on a direct comparison of Rotaphone rotational records with ADR. After the pre-calibration is completed, the measured rotations will only be much more accurate, no major changes in the records are expected.
The accuracy of the data from the properly pre-calibrated instruments is expected to be high enough to allow for much more accurate phase velocity estimates. Such estimates may reveal frequency surface-wave phase-velocity dispersion. We plan to revisit the measured 6C data from the GOF experiment and study these phenomena in detail, including, perhaps, inversion for shallow geological structure while using the method recently proposed by Málek et al. [
35].

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













