Marine Icing Sensor with Phase Discrimination


Abstract
:1. Introduction
2. Methodology
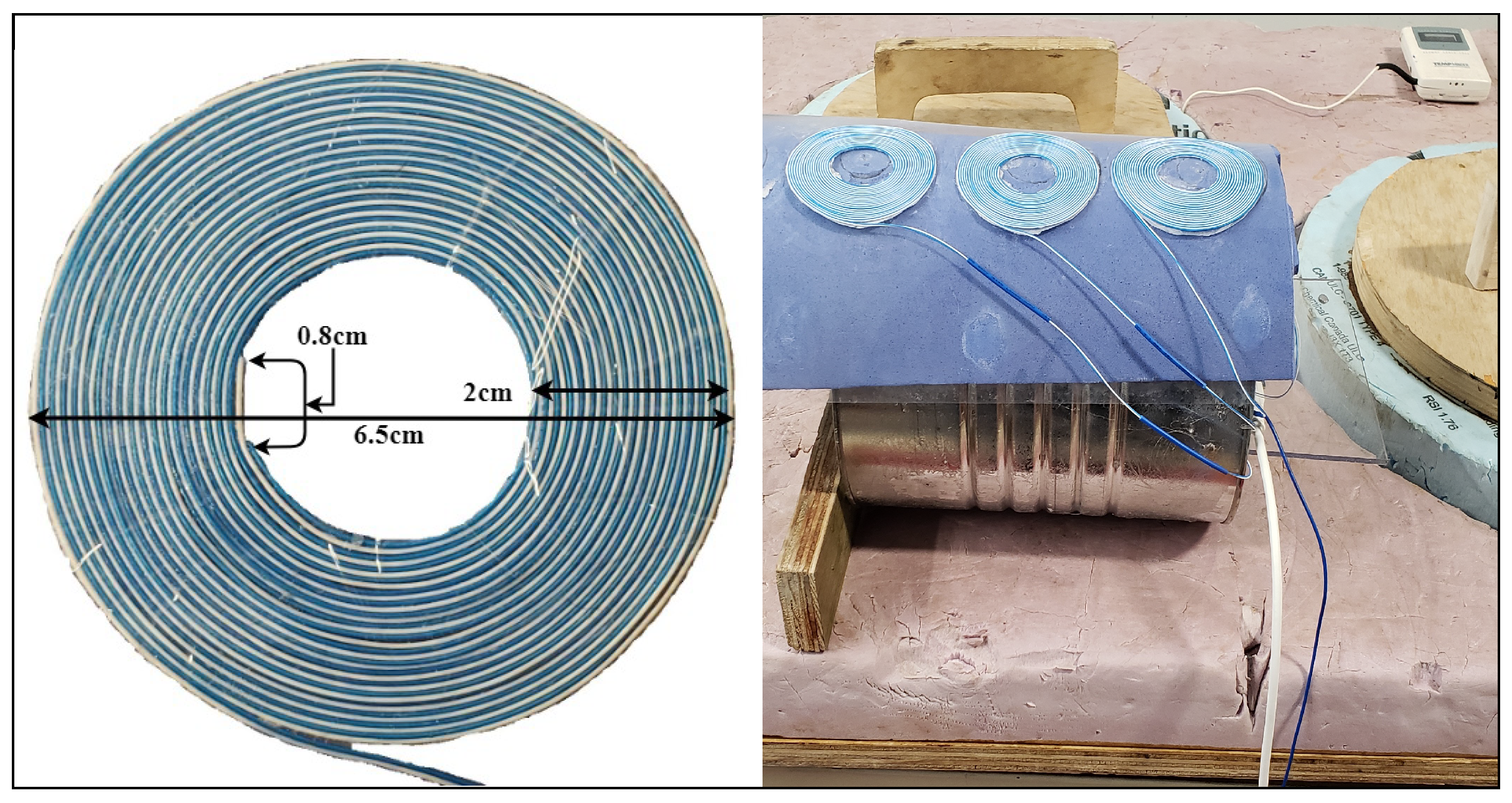
3. Experimental Validation
4. Signal Processing
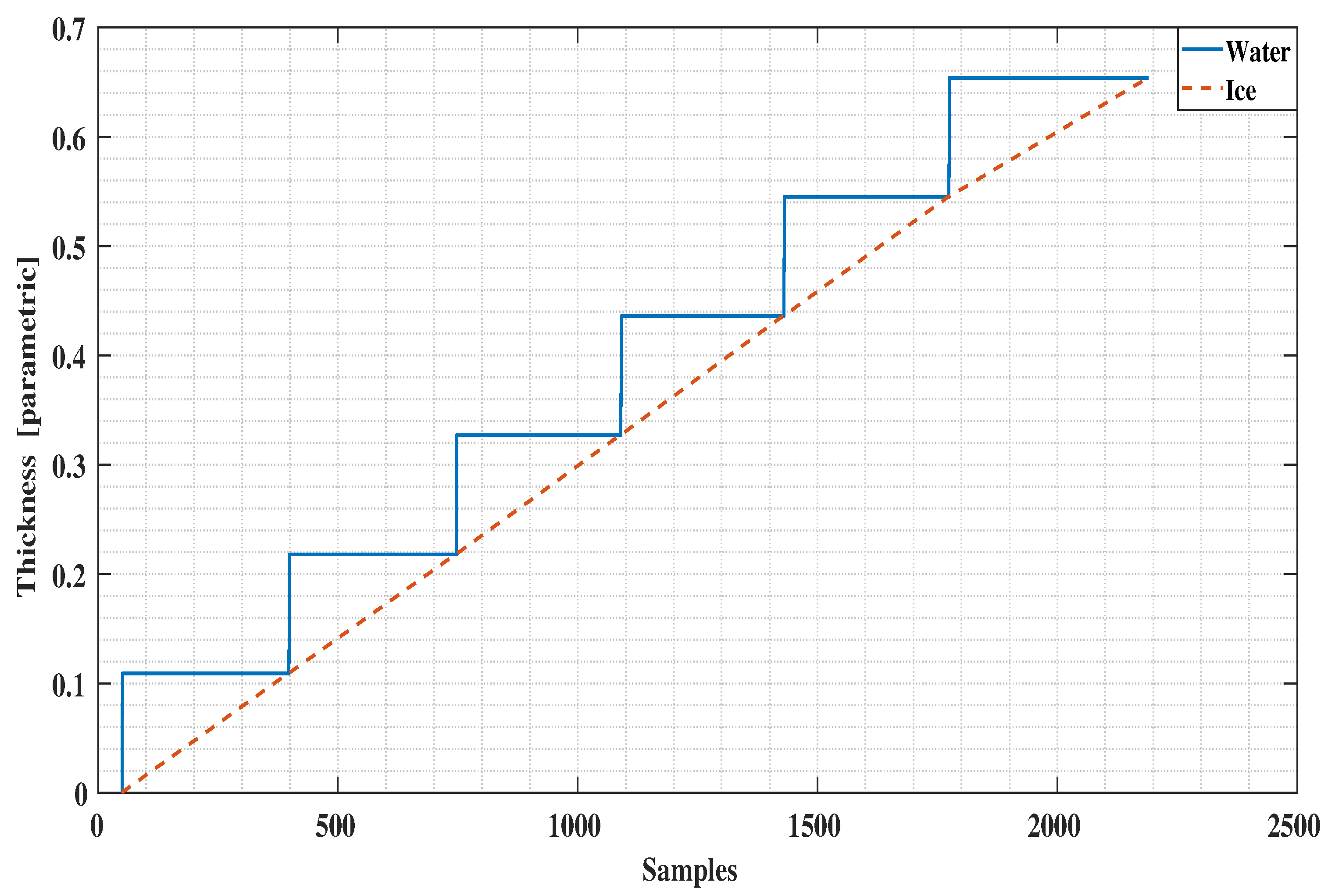
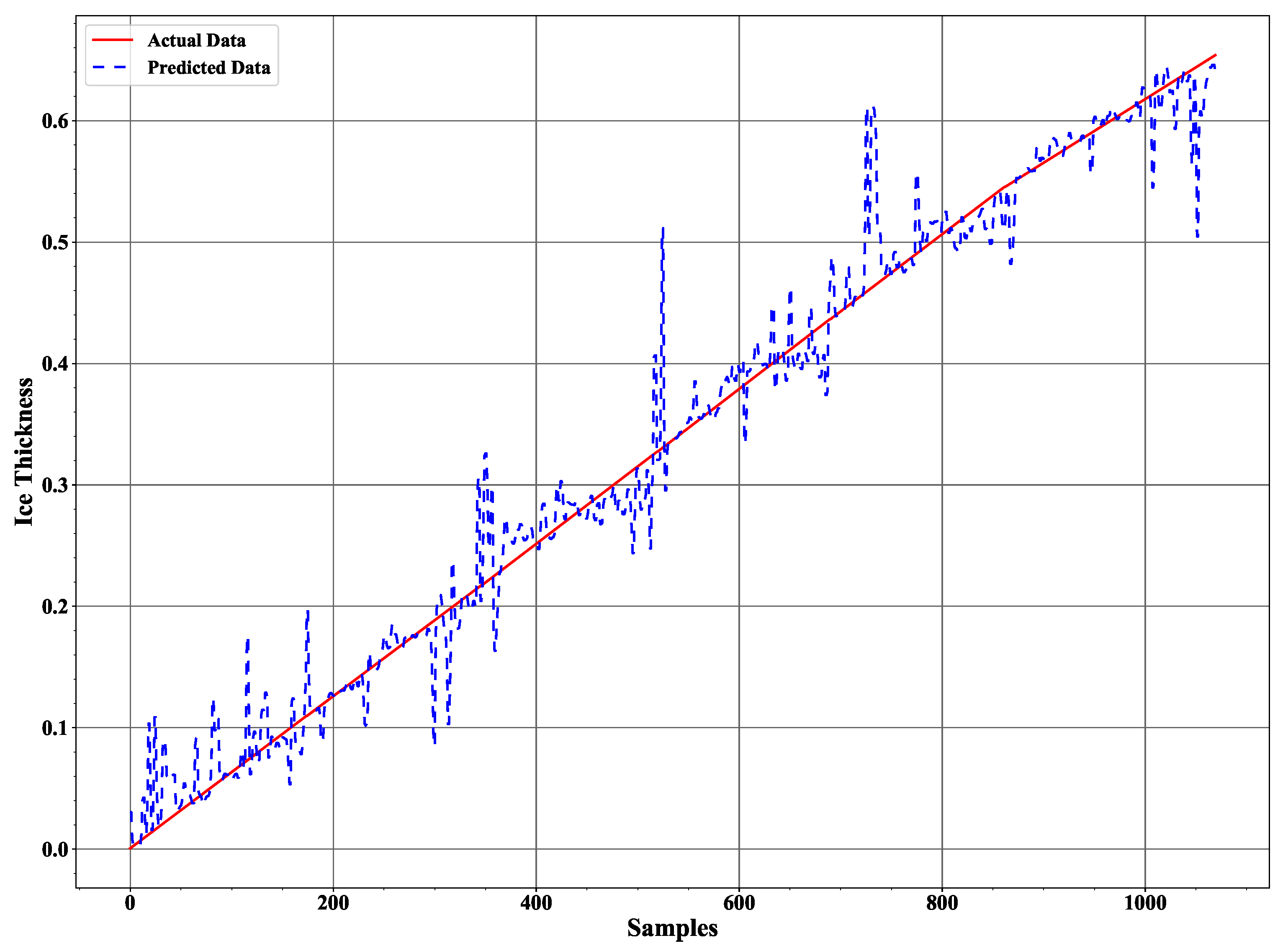
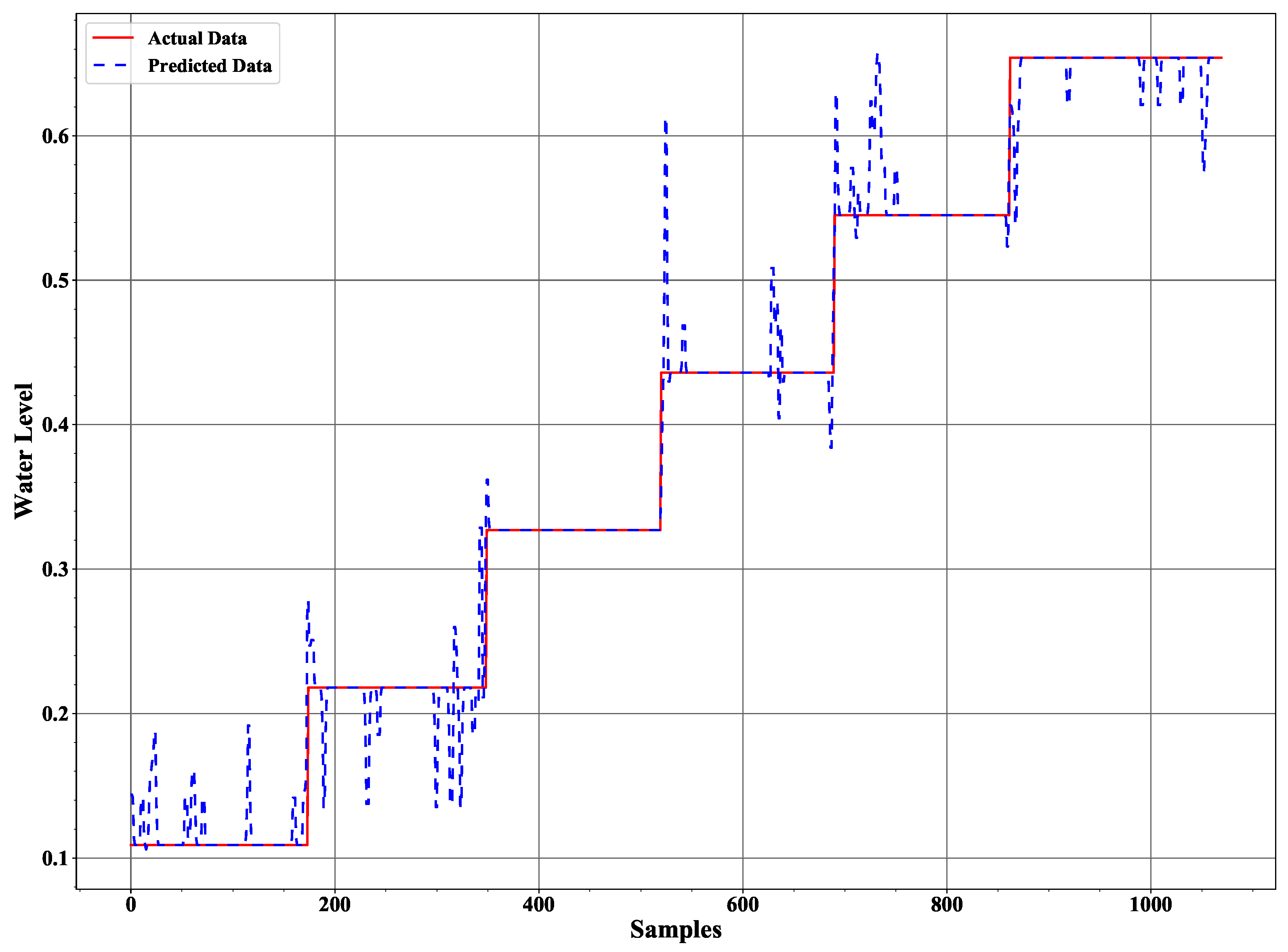
5. Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gregow, E.; Bernstein, B.; Wittmeyer, I.; Hirvonen, J. LAPS–LOWICE: A Real-Time System for the Assessment of Low-Level Icing Conditions and Their Effect on Wind Power. J. Atmos. Ocean. Technol. 2015, 32, 1447–1463. [Google Scholar] [CrossRef]
- Dehghani-Sanij, A.R.; Dehghani, S.R.; Naterer, G.F.; Muzychka, Y.S. Marine icing phenomena on vessels and offshore structures: Prediction and analysis. Ocean. Eng. 2017, 143, 1–23. [Google Scholar] [CrossRef]
- Neumayer, M.; Bretterklieber, T.; Flatscher, M. Signal Processing for Capacitive Ice Sensing: Electrode Topology and Algorithm Design. IEEE Trans Instrum. Meas. 2019, 68, 1458–1466. [Google Scholar] [CrossRef]
- Combitech, The Ice Load Surveillance Sensor IceMonitor, Product Sheet, 2013. Available online: http://www.rwis.net/res/pdffiles/IceMonitor_Product_Sheet.pdf (accessed on 23 December 2020).
- Goodrich Ice Detector Models 0871LH1; UTC Aerospace Systems: Burnsville, MN, USA, 2013.
- T40 Series of Icing Rate Sensors. HoloOptics, User Guide. Katarinavägen 22, S116 45 Stockholm Sweden/Suede, 2010. Available online: http://holooptics.utrymmet.com/Products_T20series.htm (accessed on 23 December 2020).
- Ice Meister Model 9734—Industrial Ice Detecting Sensor System. New Avionics Corporation, Technical Data Sheet. 2501 East Commercial Blvd, Fort Lauderdale FL 33308 USA, 2016. Available online: http://newavionics.com/9734-open-sky/ (accessed on 23 December 2020).
- IDS-20 Product Information. SOMMER Messtechnik. Sommer GmbH, Strassenhaeuser 27, A-6842 Koblach, V-11/2016. Available online: https://www.elscolab.com/en/products/non-contact-ice-detection-sensor-ids-20 (accessed on 23 December 2020).
- Zhi, X.; Cho, H.C.; Wang, B.; Ahn, C.H.; Moon, H.S.; Go, J.S. Development of a Capacitive Ice Sensor to Measure Ice Growth in Real Time. Sensors 2015, 15, 6688–6698. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Go, J.S. Ice Thickness Measurement Sensor. U.S. Patent 10,066,923 B2, 4 September 2018. Available online: http://patentimages.storage.googleapis.com/bd/75/23/9016fcbfb5cbc2/US10066923.pdf (accessed on 23 December 2020).
- Ezeoru, C. Marine Icing Sensor Design Using Capacitive Techniques. Master’s Thesis, Memorial University of Newfoundland, St. John’s, NL, Canada, August 2016. [Google Scholar]
- Elzaidi, A.; Masek, V.; Muzychka, Y. Phase Discrimination in Marine Icing Using a Coplanar Capacitive Array. IEEE Sens. J. 2019, 19, 11301–11308. [Google Scholar] [CrossRef]
- Elzaidi, A.; Masek, V.; Bruneau, S. Water and Ice Detection in Marine Icing by Capacitive Sensor Array and the Artificial Neural Network Model. In Proceedings of the 2019 IEEE 10th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 17–19 October 2019. [Google Scholar]
- Mosavi, A.; Ozturk, P.; Chau, K.-w. Flood prediction using machine learning models: Literature review. Water 2018, 10, 1536. [Google Scholar] [CrossRef] [Green Version]
- Torabi, M.; Mosavi, A.; Ozturk, P.; Varkonyi-Koczy, A.; Istvan, V. A hybrid machine learning approach for daily prediction of solar radiation. In Recent Advances in Technology Research and Education; Springer: Cham, Switzerland, 2018; pp. 266–274. [Google Scholar]
- Jiménez, A.A.; Márquez, F.P.G.; Moraleda, V.B.; Muñoz, C.Q.G. Linear and nonlinear features and machine learning for wind turbine blade ice detection and diagnosis. Renew. Energy 2019, 132, 1034–1048. [Google Scholar] [CrossRef] [Green Version]
- Mahmoud, T.; Dong, Z.Y.; Ma, J. An advanced approach for optimal wind power generation prediction intervals by using self-adaptive evolutionary extreme learning machine. Renew. Energy 2018, 126, 254–269. [Google Scholar] [CrossRef]
- Alharbi, S.; Rodriguez, P.; Maharaja, R.; Iyer, P.; Subaschandrabose, N.; Ye, Z. Secure the internet of things with challenge response authentication in fog computing. In Proceedings of the 2017 IEEE 36th International Performance Computing and Communications Conference (IPCCC), San Diego, CA, USA, 10–12 December 2017. [Google Scholar]
- Vanfretti, L.; Narasimham Arava, V.S. Decision tree-based classification of multiple operating conditions for power system voltage stability assessment. Int. J. Electr. Power Energy Syst. 2020, 123, 106251. [Google Scholar] [CrossRef]
- Phiri, D.; Simwanda, M.; Nyirenda, V.; Murayama, Y.; Ranagalage, M. Decision Tree Algorithms for Developing Rulesets for Object-Based Land Cover Classification. ISPRS Int. J. Geo-Inf. 2020, 9, 329. [Google Scholar] [CrossRef]
- Polat, K.; Güneş, S. Classification of epileptiform EEG using a hybrid system based on decision tree classifier and fast Fourier transform. Appl. Math. Comput. 2007, 187, 1017–1026. [Google Scholar] [CrossRef]
- Knight, C.A. Curved growth of ice on surfaces. J. Appl. Phys. 1962, 33, 1808–1815. [Google Scholar] [CrossRef]
- Texas Instruments, FDC2214 with Two Capacitive Sensors Evaluation Module. Available online: http://www.ti.com/tool/FDC2214EVM (accessed on 23 December 2020).
- Song, Y.-Y.; Ying, L.U. Decision tree methods: Applications for classification and prediction. Shanghai Arch. Psychiatry 2015, 27, 130. [Google Scholar] [PubMed]
- Tan, P.-N.; Steinbach, M.; Kumar, V. Introduction to Data Mining; Pearson New International Edition PDF eBook; Pearson Schweiz Ag: London, UK, 2013; Volume 4, pp. 145–206. [Google Scholar]
- Han, J.; Pei, J.; Kamber, M. Data Mining: Concepts and Techniques; Elsevier: Amsterdam, The Netherlands, 2011. [Google Scholar]
- Gupta, D.L.; Malviya, A.K.; Singh, S. Performance analysis of classification tree learning algorithms. Int. J. Comput. Appl. 2012, 55, 39–44. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | |
|---|---|
| air | 1.0006 |
| water | 81 |
| ice | 4.2 |
| PET | 3.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elzaidi, A.; Masek, V.; Bruneau, S. Marine Icing Sensor with Phase Discrimination. Sensors 2021, 21, 612. https://doi.org/10.3390/s21020612
Elzaidi A, Masek V, Bruneau S. Marine Icing Sensor with Phase Discrimination. Sensors. 2021; 21(2):612. https://doi.org/10.3390/s21020612
Chicago/Turabian StyleElzaidi, Abdulrazak, Vlastimil Masek, and Stephen Bruneau. 2021. "Marine Icing Sensor with Phase Discrimination" Sensors 21, no. 2: 612. https://doi.org/10.3390/s21020612
APA StyleElzaidi, A., Masek, V., & Bruneau, S. (2021). Marine Icing Sensor with Phase Discrimination. Sensors, 21(2), 612. https://doi.org/10.3390/s21020612