Ramie Yield Estimation Based on UAV RGB Images

Abstract
:1. Introduction
2. Materials and Methods
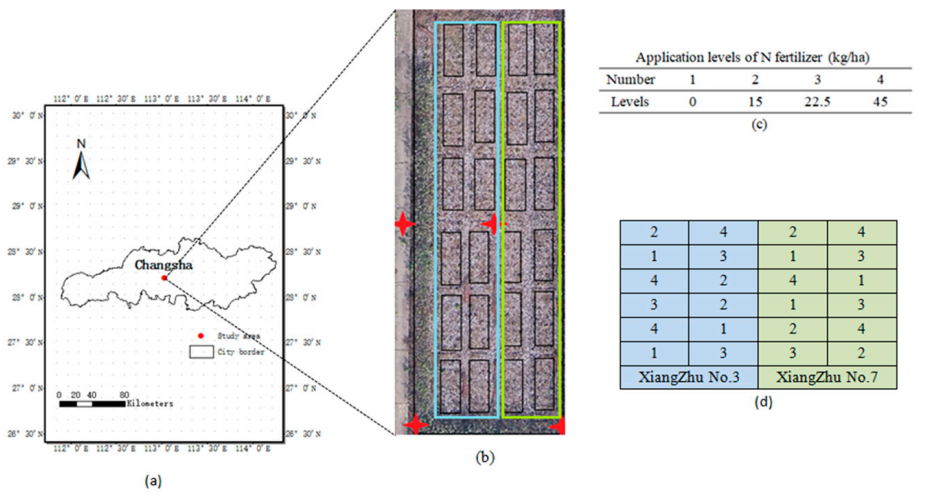
2.1. Study Area
2.2. UAV Image Acquisition
2.3. Image Processing
2.3.1. Image Mosaicking
2.3.2. Vegetation Index Calculation
2.3.3. Plant Height Estimation
2.3.4. Plant Counting
2.4. Field Date Collection
2.5. Model Construction and Statistical Analyses
3. Result
3.1. Effects of Different Nitrogen Levels
3.1.1. Effect of Different N Levels on Plant Height
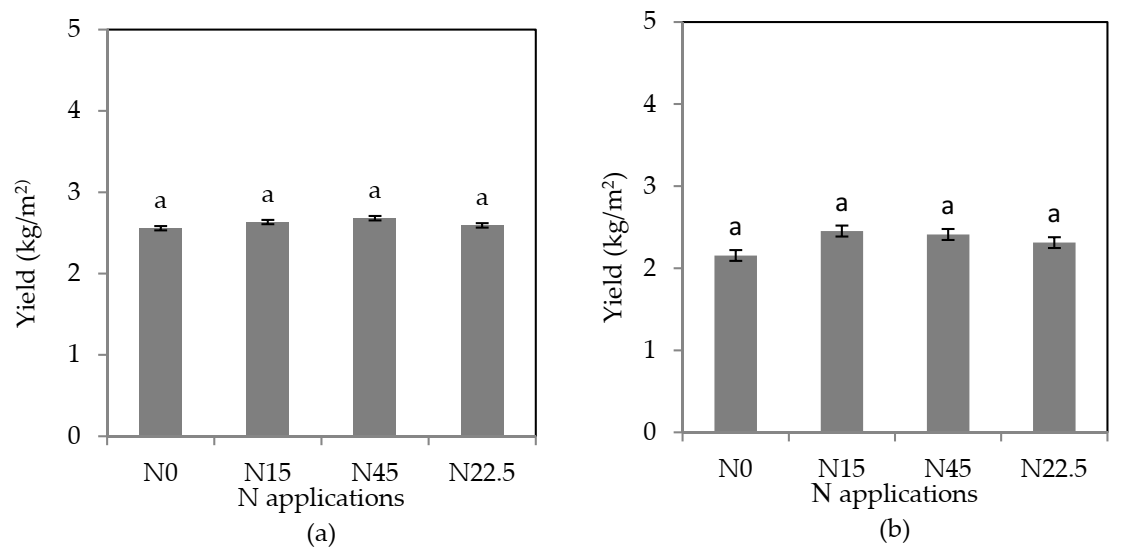
3.1.2. Nitrogen Level Contributions to Yield
3.2. Estimation of Ramie Yield Using UAV-Based Image Data
3.2.1. Estimation of Plant Height and Plant Number Using UAV-Based Image Data
3.2.2. Relationship between Plant Height, Plant Number, and Ramie Yield
3.2.3. Relationship between VIs and Ramie Yield
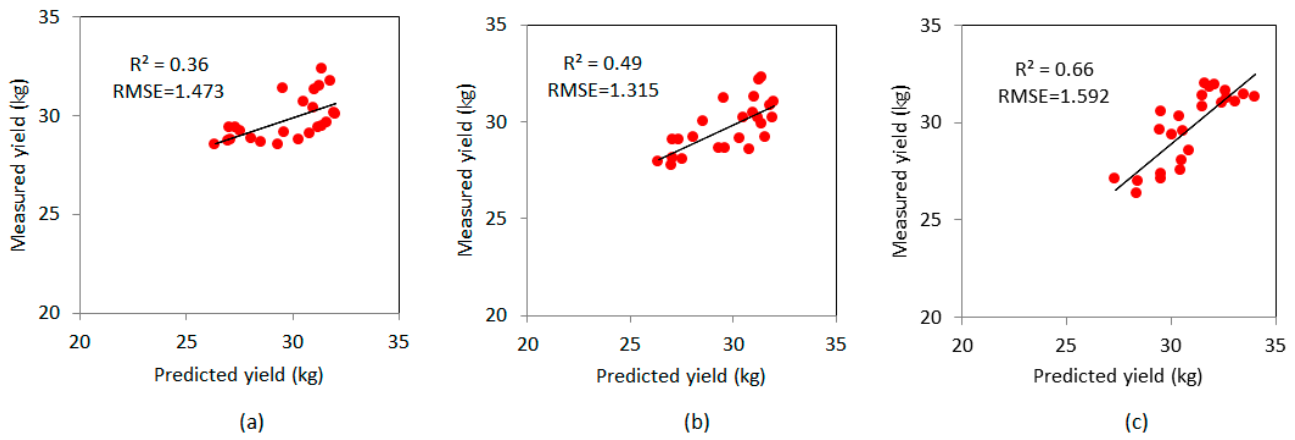
3.2.4. Estimation of Ramie Yield Using UAV-Based Image Data
4. Discussion
4.1. Comparison of Field Measurements and UAV-Based Image Data
4.2. Relationship between UAV-Based Image Data and Ramie Yield
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Becker-Reshef, I.; Vermote, E.; Lindeman, M.; Justice, C. A generalized regression-based model for forecasting winter wheat yields in Kansas and Ukraine using MODIS data. Remote Sens. Environ. 2010, 114, 1312–1323. [Google Scholar] [CrossRef]
- Xavier, A.C.; Rudorff, B.F.T.; Moreira, M.A.; Alvarenga, B.S.; De Freitas, J.G.; Salomon, M.V. Hyperspectral field reflectance measurements to estimate wheat grain yield and plant height. Sci. Agric. 2006, 63, 130–138. [Google Scholar] [CrossRef] [Green Version]
- Hernandez, J.; Lobos, G.A.; Matus, I.; Del Pozo, A.; Silva, P.; Galleguillos, M. Using Ridge Regression Models to Estimate Grain Yield from Field Spectral Data in Bread Wheat (Triticum aestivum L.) Grown under Three Water Regimes. Remote Sens. 2015, 7, 2109–2126. [Google Scholar] [CrossRef] [Green Version]
- Justice, C.O.; Becker-Reshef, I. Report from the Workshop on Developing a Strategy for Global Agricultural Monitoring in the Framework of Group on Earth Observations (GEO); Workshop Report; FAO: Rome, Italy, 2007; pp. 1–67. [Google Scholar]
- Zhang, J.; Yang, C.; Song, H.; Hoffmann, C.; Zhang, D.; Zhang, G. Evaluation of an Airborne Remote Sensing Platform Consisting of Two Consumer-Grade Cameras for Crop Identification. Remote Sens. 2016, 8, 257. [Google Scholar] [CrossRef] [Green Version]
- Schirrmann, M.; Giebel, A.; Gleiniger, F.; Pflanz, M.; Lentschke, J.; Dammer, K.-H. Monitoring Agronomic Parameters of Winter Wheat Crops with Low-Cost UAV Imagery. Remote Sens. 2016, 8, 706. [Google Scholar] [CrossRef] [Green Version]
- Han, L.; Yang, G.; Dai, H.; Xu, B.; Yang, H.; Feng, H.; Li, Z.; Yang, X. Modeling maize above-ground biomass based on machine learning approaches using UAV remote-sensing data. Plant Methods 2019, 15, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.; Feng, Q.; Liang, T.; Liu, B.; Zhang, W.; Xie, H. Modeling grassland above-ground biomass based on artificial neural network and remote sensing in the Three-River Headwaters Region. Remote Sens. Environ. 2018, 204, 448–455. [Google Scholar] [CrossRef]
- Bendig, J.; Bolten, A.; Bareth, G. Introducing a Low-Cost Mini-UAV for Thermal-And Multispectral-Imaging. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 345–349. [Google Scholar] [CrossRef] [Green Version]
- Bendig, J.; Bolten, A.; Bennertz, S.; Broscheit, J.; Eichfuss, S.; Bareth, G. Estimating Biomass of Barley Using Crop Surface Models (CSMs) Derived from UAV-Based RGB Imaging. Remote Sens. 2014, 6, 10395–10412. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.X.; Ren, J.Q.; Tang, H.J.; Shi, Y.; Len, P.; Wang, L.M.; Wu, W.B.; Yao, Y.M. Hasituya. Progress and perspectives on agricultural remote sensing research and applications; in Chinese with English abstract. J. Remote Sens. 2016, 20, 748–767. [Google Scholar]
- Cui, R.-X.; Liu, Y.-D.; Fu, J.-D. Estimation of Winter Wheat Biomass Using Visible Spectral and BP Based Artificial Neural Networks. Guang Pu Xue Yu Guang Pu Fen Xi 2015, 35, 2596–2601. [Google Scholar] [PubMed]
- Li, J.H.; Zhu, L.L.; Song, S.Y. Application of digital image technology in diagnosis of potato nitrogen nutrition; in Chinese with English abstract. J. Anhui Agric. Sci. 2012, 6, 3303–3305. [Google Scholar]
- Hunt, E.R.; Cavigelli, M.; Daughtry, C.S.T.; McMurtrey, J.E.; Walthall, C.L. Evaluation of Digital Photography from Model Aircraft for Remote Sensing of Crop Biomass and Nitrogen Status. Precis. Agric. 2005, 6, 359–378. [Google Scholar] [CrossRef]
- Li, C.C.; Niu, Q.L.; Yang, G.J.; Feng, H.K.; Liu, J.G.; Wang, Y.J. Estimation of Leaf Area Index of Soybean Breeding Materials Basedon UAV Digital Images; in Chinese with English abstract. Trans. Chin. Soc. Agric. Mach. 2017, 8, 147–158. [Google Scholar]
- Geipel, J.; Link, J.; Claupein, W. Combined Spectral and Spatial Modeling of Corn Yield Based on Aerial Images and Crop Surface Models Acquired with an Unmanned Aircraft System. Remote Sens. 2014, 6, 10335–10355. [Google Scholar] [CrossRef] [Green Version]
- Watanabe, K.; Guo, W.; Arai, K.; Takanashi, H.; Kajiya-Kanegae, H.; Kobayashi, M.; Yano, K.; Tokunaga, T.; Fujiwara, T.; Tsutsumi, N.; et al. High-Throughput Phenotyping of Sorghum Plant Height Using an Unmanned Aerial Vehicle and Its Application to Genomic Prediction Modeling. Front. Plant. Sci. 2017, 8, 421. [Google Scholar] [CrossRef] [Green Version]
- Chang, A.; Jung, J.; Maeda, M.; Landivar-Bowles, J. Crop height monitoring with digital imagery from Unmanned Aerial System (UAS). Comput. Electron. Agric. 2017, 141, 232–237. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Stark, R.; Rundquist, D. Novel algorithms for remote estimation of vegetation fraction. Remote Sens. Environ. 2002, 80, 76–87. [Google Scholar] [CrossRef] [Green Version]
- Sulik, J.J.; Long, D.S. Spectral considerations for modeling yield of canola. Remote Sens. Environ. 2016, 184, 161–174. [Google Scholar] [CrossRef] [Green Version]
- Rasmussen, J.; Ntakos, G.; Nielsen, J.; Svensgaard, J.; Poulsen, R.N.; Christensen, S. Are vegetation indices derived from consumer-grade cameras mounted on UAVs sufficiently reliable for assessing experimental plots? Eur. J. Agron. 2016, 74, 75–92. [Google Scholar] [CrossRef]
- Guijarro, M.; Pajares, G.; Riomoros, I.; Herrera, P.; Artizzu, X.B.; Ribeiro, A. Automatic segmentation of relevant textures in agricultural images. Comput. Electron. Agric. 2011, 75, 75–83. [Google Scholar] [CrossRef] [Green Version]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Sindagi, V.A.; Patel, V.M. A survey of recent advances in CNN-based single image crowd counting and density estimation. Pattern Recognit. Lett. 2018, 107, 3–16. [Google Scholar] [CrossRef] [Green Version]
- Ren, S.Q.; He, K.M.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 39, 91–99. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Xie, T.; Yang, C.; Song, H.; Jiang, Z.; Zhou, G.; Zhang, D.; Feng, H.; Xie, J. Segmenting Purple Rapeseed Leaves in the Field from UAV RGB Imagery Using Deep Learning as an Auxiliary Means for Nitrogen Stress Detection. Remote Sens. 2020, 12, 1403. [Google Scholar] [CrossRef]
- Li, W.; Niu, Z.; Chen, H.; Li, D.; Wu, M.; Zhao, W. Remote estimation of canopy height and aboveground biomass of maize using high-resolution stereo images from a low-cost unmanned aerial vehicle system. Ecol. Indic. 2016, 67, 637–648. [Google Scholar] [CrossRef]
- García-Martínez, H.; Flores, H.; Ascencio-Hernández, R.; Khalil-Gardezi, A.; Tijerina-Chávez, L.; Mancilla-Villa, O.R.; Vázquez-Peña, M.A. Corn Grain Yield Estimation from Vegetation Indices, Canopy Cover, Plant Density, and a Neural Network Using Multispectral and RGB Images Acquired with Unmanned Aerial Vehicles. Agriculture 2020, 10, 277. [Google Scholar] [CrossRef]
- Mutanga, O.; Adam, E.; Cho, M.A. High density biomass estimation for wetland vegetation using WorldView-2 imagery and random forest regression algorithm. Int. J. Appl. Earth Obs. Geoinf. 2012, 18, 399–406. [Google Scholar] [CrossRef]
- Wang, X.Q.; Wang, M.M.; Wang, S.Q.; Wu, Y.D. Extraction of vegetation information from visible unmanned aerial vehicle images. Trans. Chin. Soc. Agric. Eng. 2015, 31, 152–159. [Google Scholar]
- Woebbecke, D.M.; E Meyer, G.; Von Bargen, K.; A Mortensen, D. Color Indices for Weed Identification Under Various Soil, Residue, and Lighting Conditions. Trans. ASAE 1995, 38, 259–269. [Google Scholar] [CrossRef]
- Penuelas, J.P.J.; Pinol, J.; Ogaya, R.; Filella, I. Estimation of plant water concentration by the reflectance Water Index WI (R900/R970). Int. J. Remote Sens. 1997, 18, 2869–2875. [Google Scholar] [CrossRef]
- Fu, Y.; Yang, G.; Wang, J.; Song, X.; Feng, H. Winter wheat biomass estimation based on spectral indices, band depth analysis and partial least squares regression using hyperspectral measurements. Comput. Electron. Agric. 2014, 100, 51–59. [Google Scholar] [CrossRef]
- Tilly, N.; Aasen, H.; Bareth, G. Fusion of plant height and vegetation indices for the estimation of barley biomass. Remote Sens. 2015, 7, 11449–11480. [Google Scholar] [CrossRef] [Green Version]
- Chu, T.; Chen, R.; Landivar, J.A.; Maeda, M.M.; Yang, C.; Starek, M.J. Cotton growth modeling and assessment using unmanned aircraft system visual-band imagery. J. Appl. Remote Sens. 2016, 10, 36018. [Google Scholar] [CrossRef] [Green Version]
- Brocks, S.; Bareth, G. Estimating Barley Biomass with Crop Surface Models from Oblique RGB Imagery. Remote Sens. 2018, 10, 268. [Google Scholar] [CrossRef] [Green Version]
- Cen, H.; Wan, L.; Zhu, J.; Li, Y.; Li, X.; Zhu, Y.; Weng, H.; Wu, W.; Yin, W.; Xu, C.; et al. Dynamic monitoring of biomass of rice under different nitrogen treatments using a lightweight UAV with dual image-frame snapshot cameras. Plant. Methods 2019, 15, 32. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dates | Growth Stages | Number of Images Collected |
|---|---|---|
| 2019/06/10 | Seedling stage | 55 |
| 2019/06/26 | Seedling stage | 55 |
| 2019/07/02 | Sealing stage | 55 |
| 2019/07/06 | Sealing stage | 55 |
| 2019/07/10 | Prosperous long-term | 55 |
| 2019/07/15 | Prosperous long-term | 55 |
| 2019/07/19 | Prosperous long-term | 55 |
| 2019/07/26 | Mature period | 55 |
| Vegetation Indices | Reference |
|---|---|
| GLA = (2 × G−R−B)/(2 ×G + R + B) | [31] |
| ExR = 1.4R − G | [32] |
| ExG = 2 × G − R − B | [32] |
| ExGR = ExG − 1.4R − G | [32] |
| WI = (G − B)/(R − G) | [33] |
| NGRDI = (G – R)/(G + R) | [14] |
| RGBVI = (G × G – R × B)/(G × G + R × B) | [19] |
| VARI = (G − R)/(G + R − B) | [20] |
| Plant Number | Plant Height | Yield | |
|---|---|---|---|
| Plant number | 1 | ||
| Plant height | 0.301 | 1 | |
| Yield | 0.600 ** | 0.524 * | 1 |
| Yield | G/R | G/B | R/B | RGBVI | VARI | ExR | ExG | ExGR | WI | NGRDI | NDYI | GLA | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Yield | 1 | ||||||||||||
| G/R | −0.06 | 1 | |||||||||||
| G/B | −0.331 | 0.536 ** | 1 | ||||||||||
| R/B | −0.36 | 0.268 | 0.957 ** | 1 | |||||||||
| RGBVI | −0.292 | 0.704 ** | 0.974 ** | 0.870 ** | 1 | ||||||||
| VARI | 0.216 | 0.701 ** | −0.221 | −0.494 * | −0.012 | 1 | |||||||
| ExR | 0.241 | −0.840** | −0.908 ** | −0.747 ** | −0.976 ** | −0.204 | 1 | ||||||
| ExG | −0.285 | 0.731 ** | 0.967 ** | 0.852 ** | 0.999 ** | 0.027 | −0.984 ** | 1 | |||||
| ExGR | −0.215 | 0.885 ** | 0.867 ** | 0.685 ** | 0.953 ** | 0.29 | −0.996 ** | 0.965 ** | 1 | ||||
| WI | 0.365 | −0.116 | −0.889 ** | −0.977 ** | −0.785 ** | 0.626 ** | 0.631 ** | −0.758 ** | −0.561 ** | 1 | |||
| NGRDI | −0.052 | 1.000 ** | 0.531 ** | 0.262 | 0.700 ** | 0.705 ** | −0.837 ** | 0.727 ** | 0.882 ** | −0.11 | 1 | ||
| NDYI | −0.331 | 0.538 ** | 0.998 ** | 0.954 ** | 0.977 ** | −0.223 | −0.908 ** | 0.968 ** | 0.868 ** | −0.896 ** | 0.533 ** | 1 | |
| GLA | −0.284 | 0.730 ** | 0.966 ** | 0.852 ** | 0.999 ** | 0.025 | −0.983 ** | 1.000 ** | 0.964 ** | −0.761 ** | 0.726 ** | 0.969 ** | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, H.; Wang, C.; Cui, G.; She, W.; Zhao, L. Ramie Yield Estimation Based on UAV RGB Images. Sensors 2021, 21, 669. https://doi.org/10.3390/s21020669
Fu H, Wang C, Cui G, She W, Zhao L. Ramie Yield Estimation Based on UAV RGB Images. Sensors. 2021; 21(2):669. https://doi.org/10.3390/s21020669
Chicago/Turabian StyleFu, Hongyu, Chufeng Wang, Guoxian Cui, Wei She, and Liang Zhao. 2021. "Ramie Yield Estimation Based on UAV RGB Images" Sensors 21, no. 2: 669. https://doi.org/10.3390/s21020669
APA StyleFu, H., Wang, C., Cui, G., She, W., & Zhao, L. (2021). Ramie Yield Estimation Based on UAV RGB Images. Sensors, 21(2), 669. https://doi.org/10.3390/s21020669