
Lane Detection Aided Online Dead Reckoning for GNSS Denied Environments

 , , , ,
, , , , 
Abstract
:1. Introduction
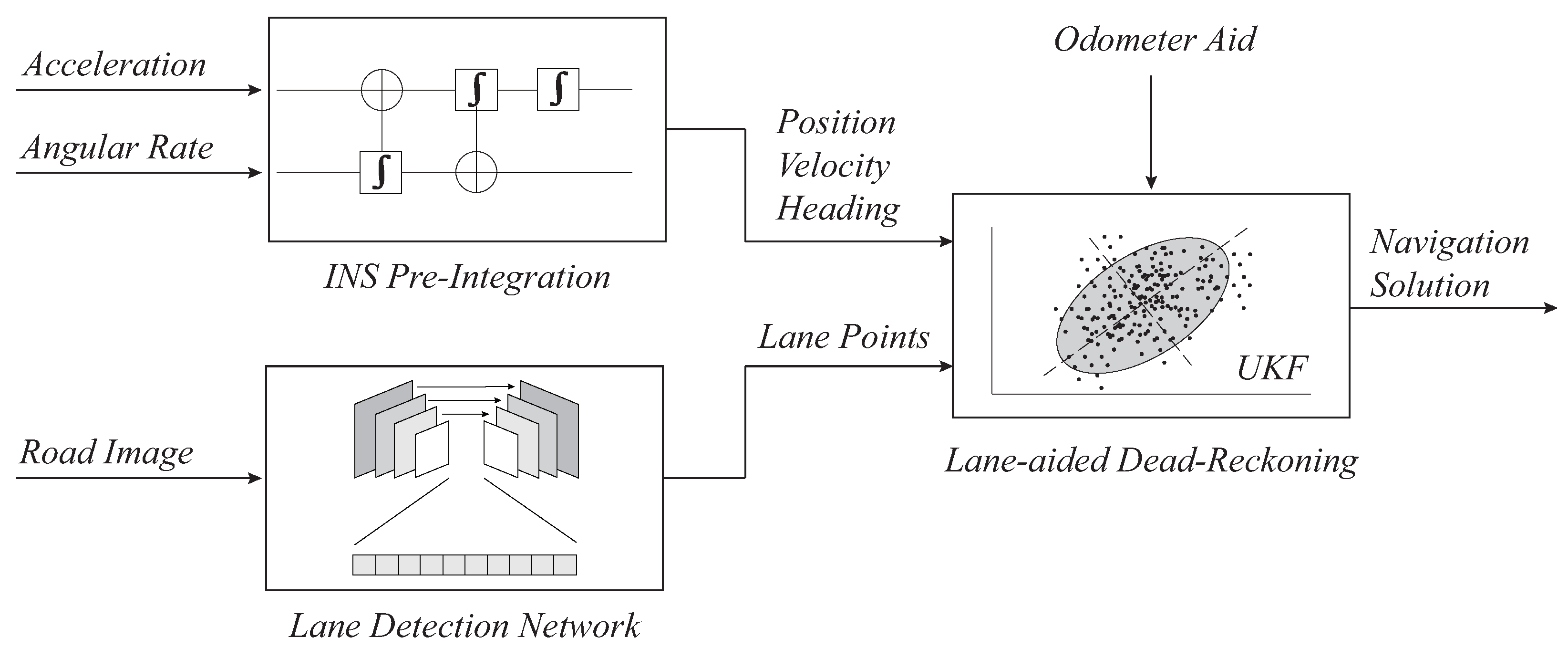
- We proposed a novel filter design that combines learning-based lane detection results with IMU mechanization for accurate vehicle localization in GNSS denied environments.
- Accurate online vehicle localization was achieved for various road geometry and environment conditions, verifying the robustness of our proposed method.
2. System Modeling
2.1. Vehicle Kinematics Model
2.2. Observer Model
3. Filter Design
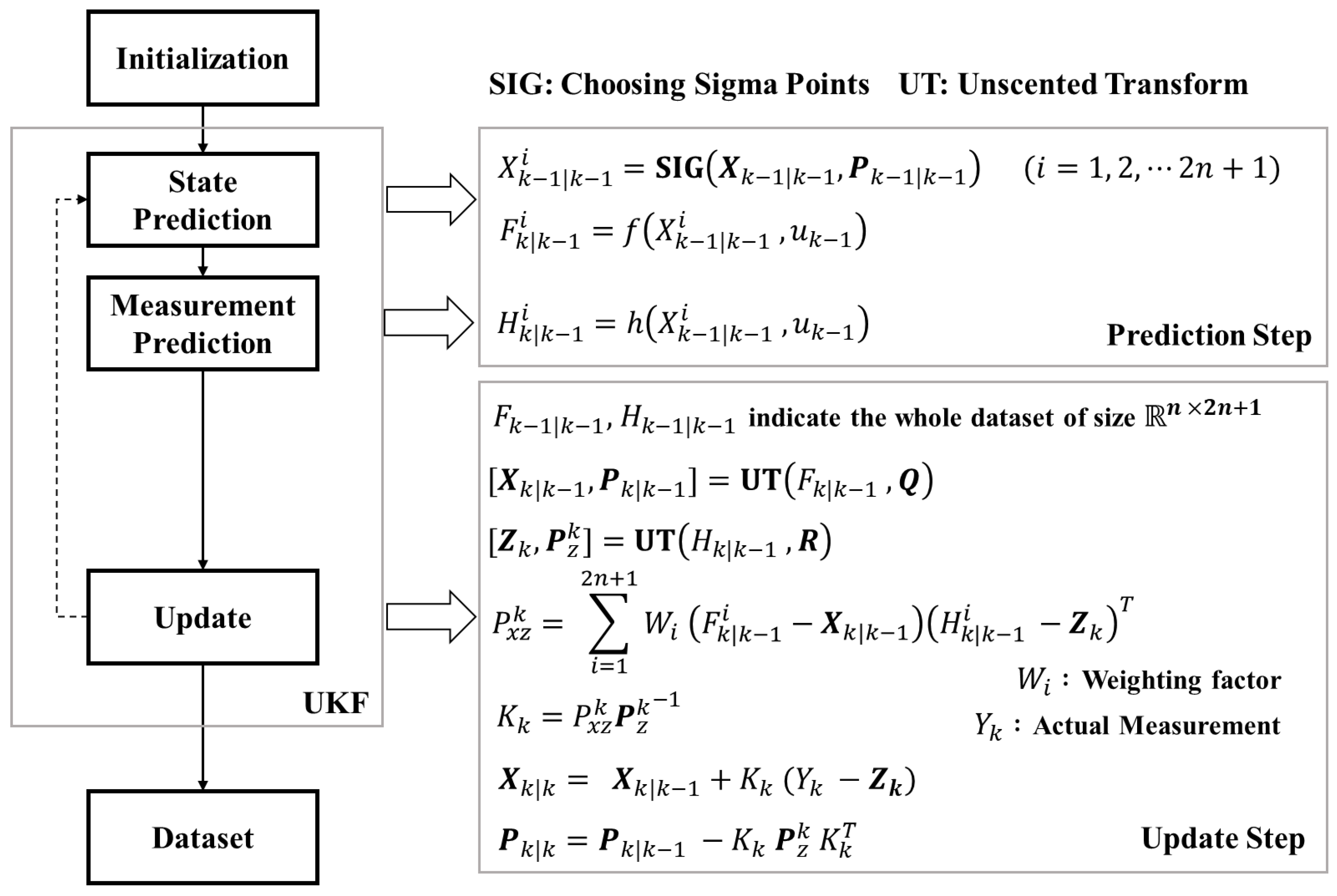
3.1. Filter Selection and Framework
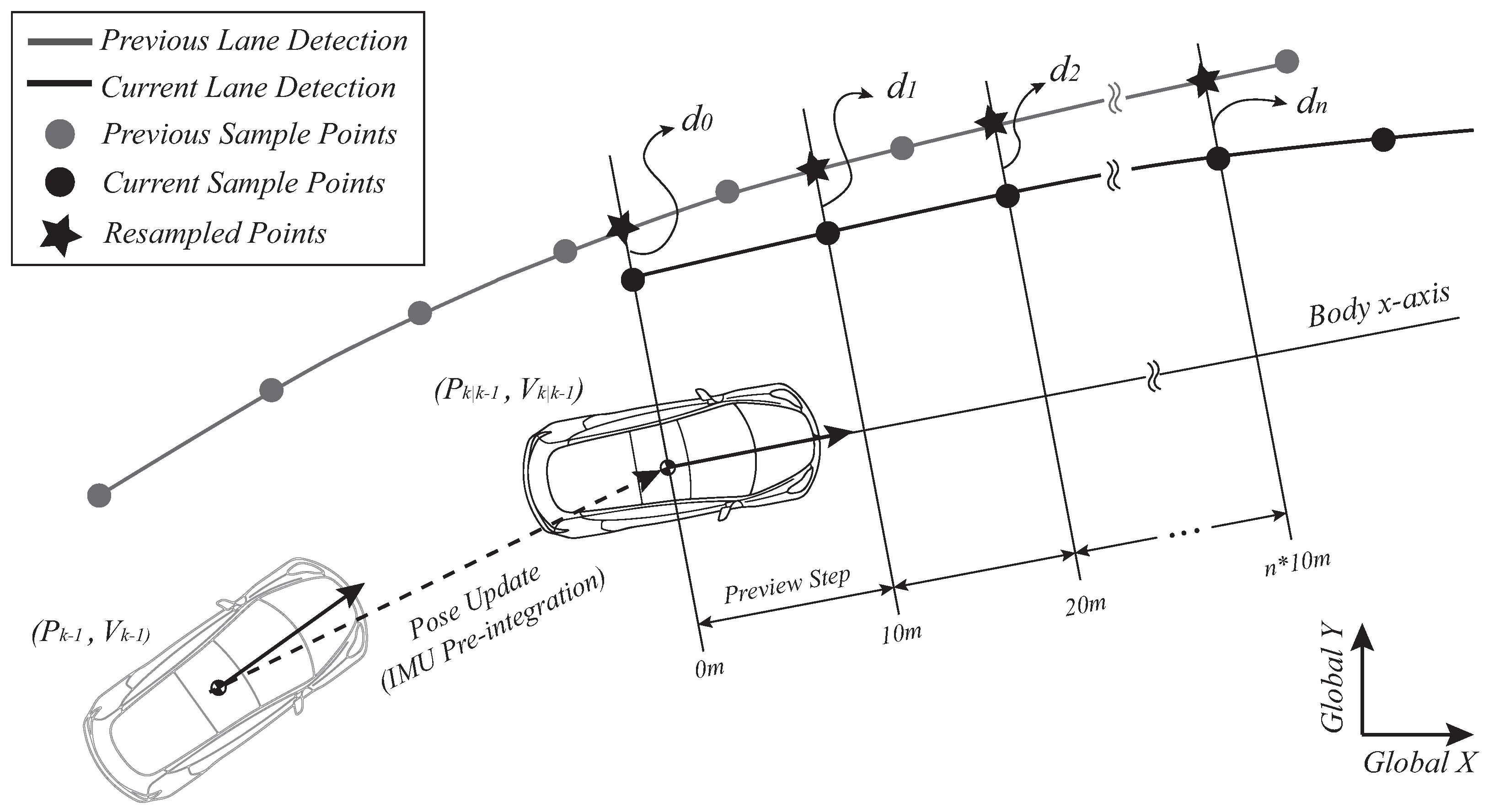
3.2. Prediction Step
3.3. Update Step
4. Experiment
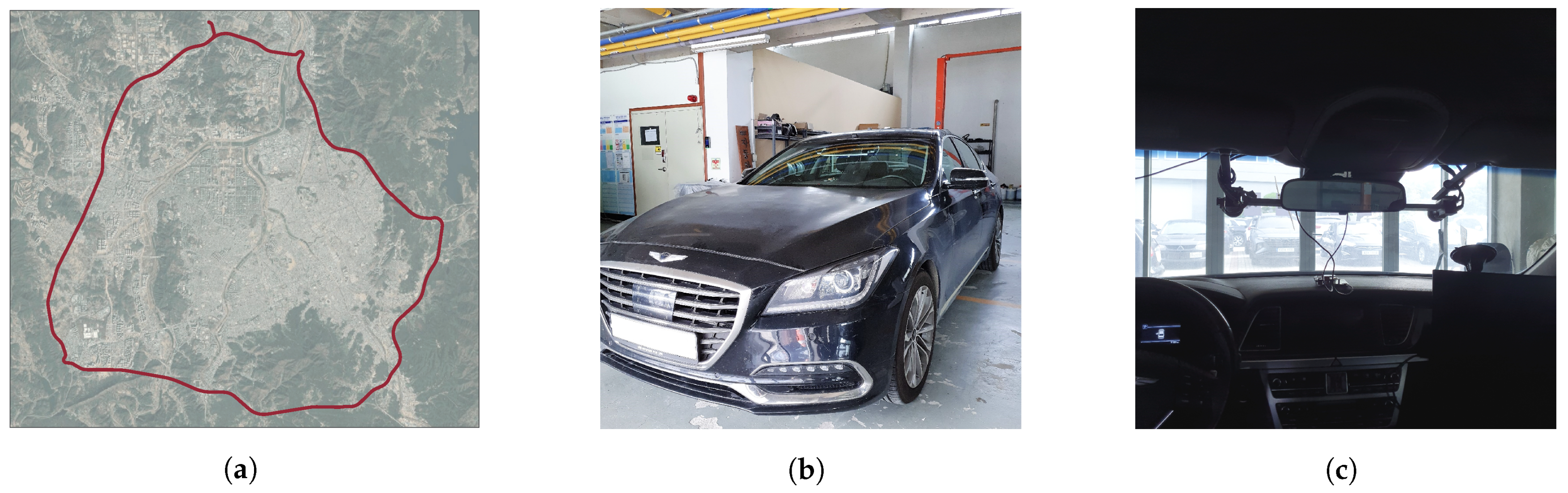
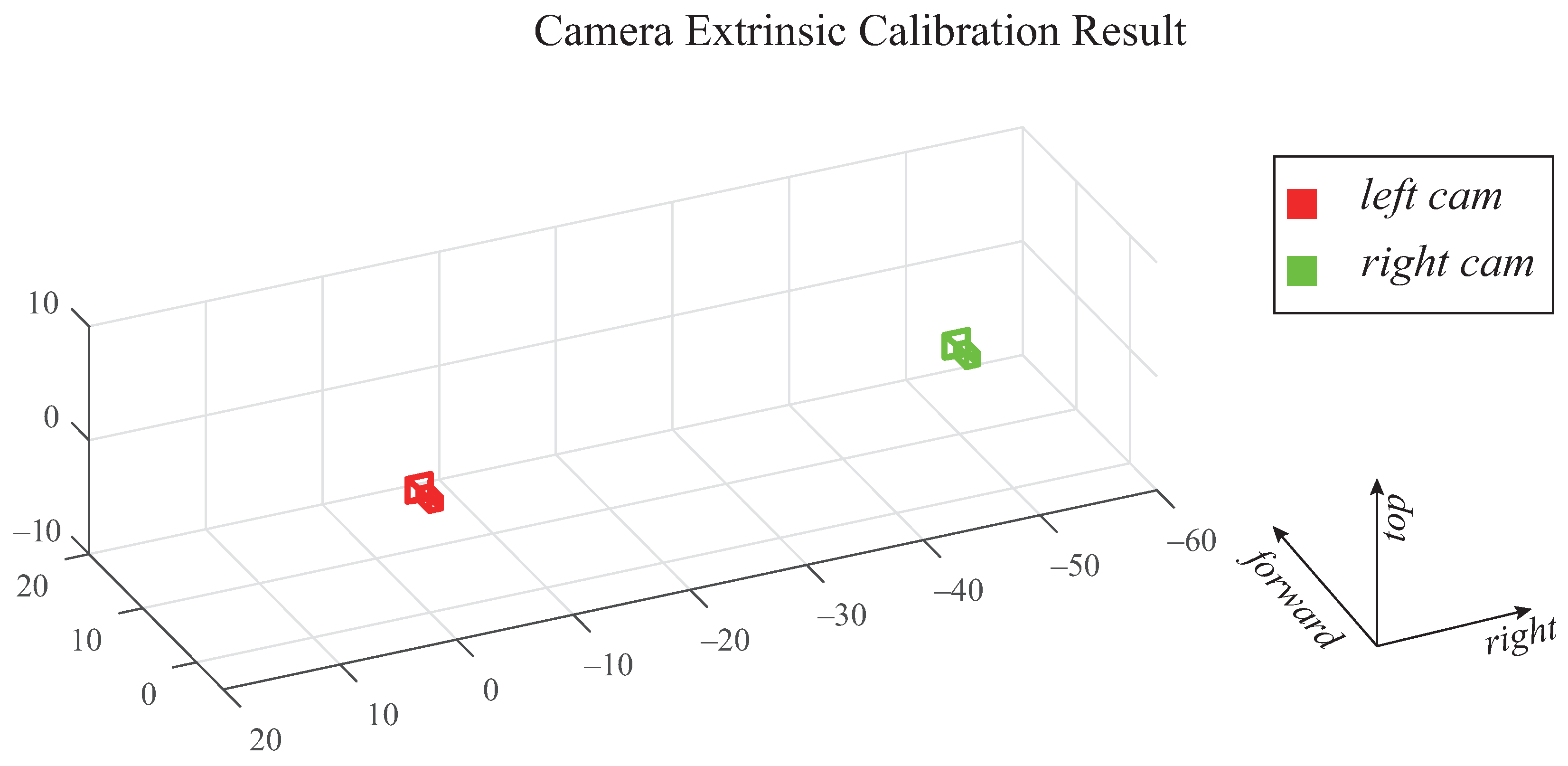
4.1. Experiment Setup and Scenarios
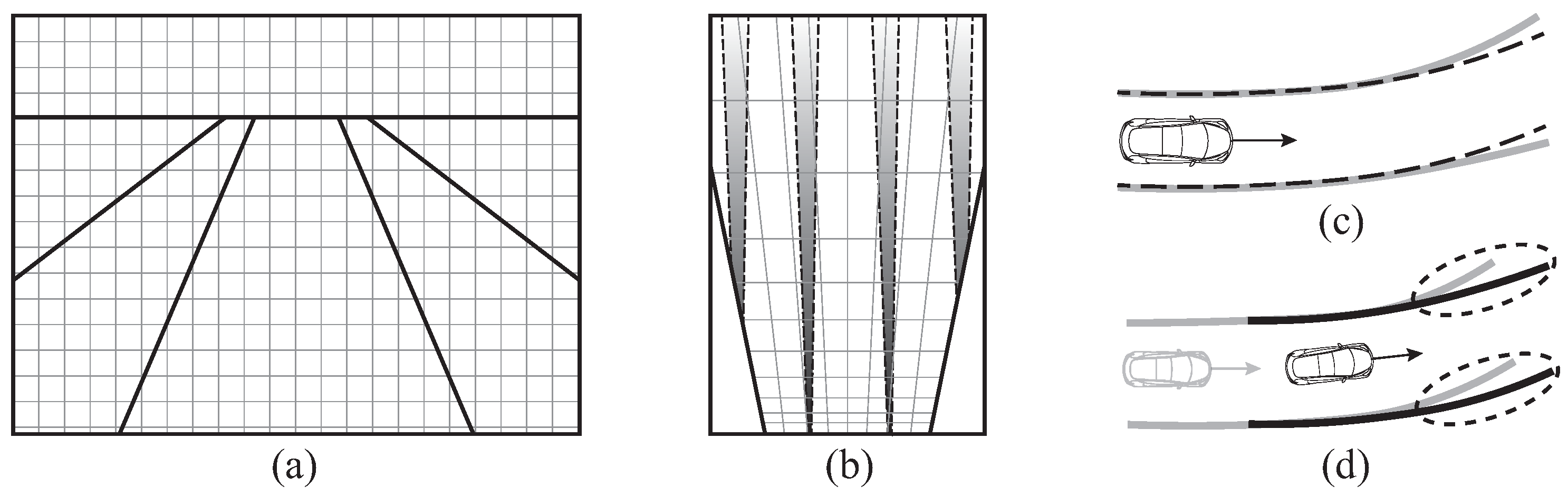
4.2. Lane Detection Model
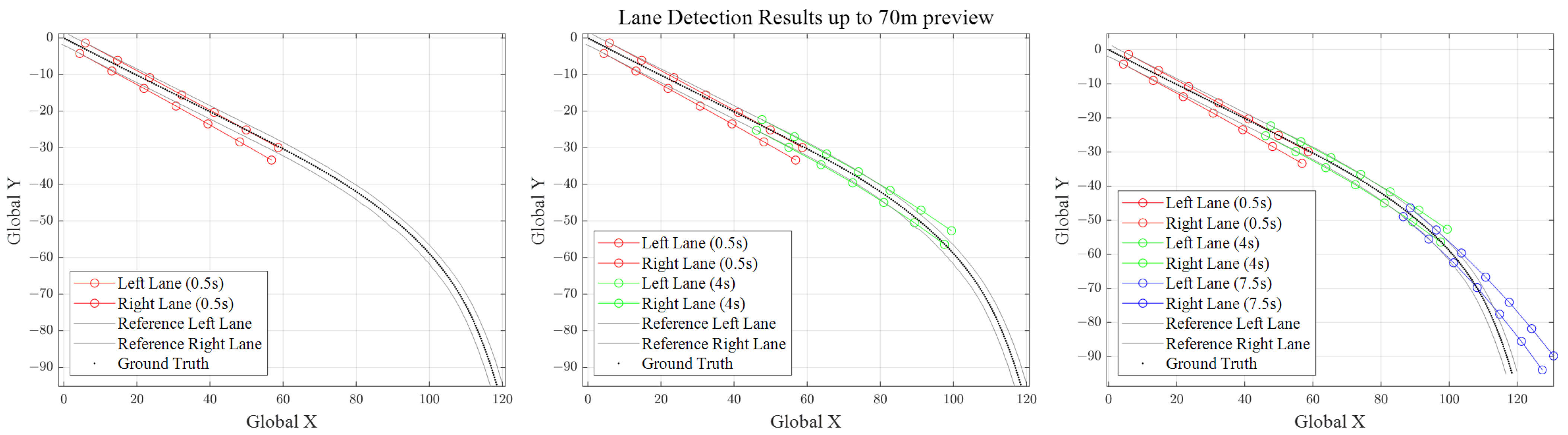
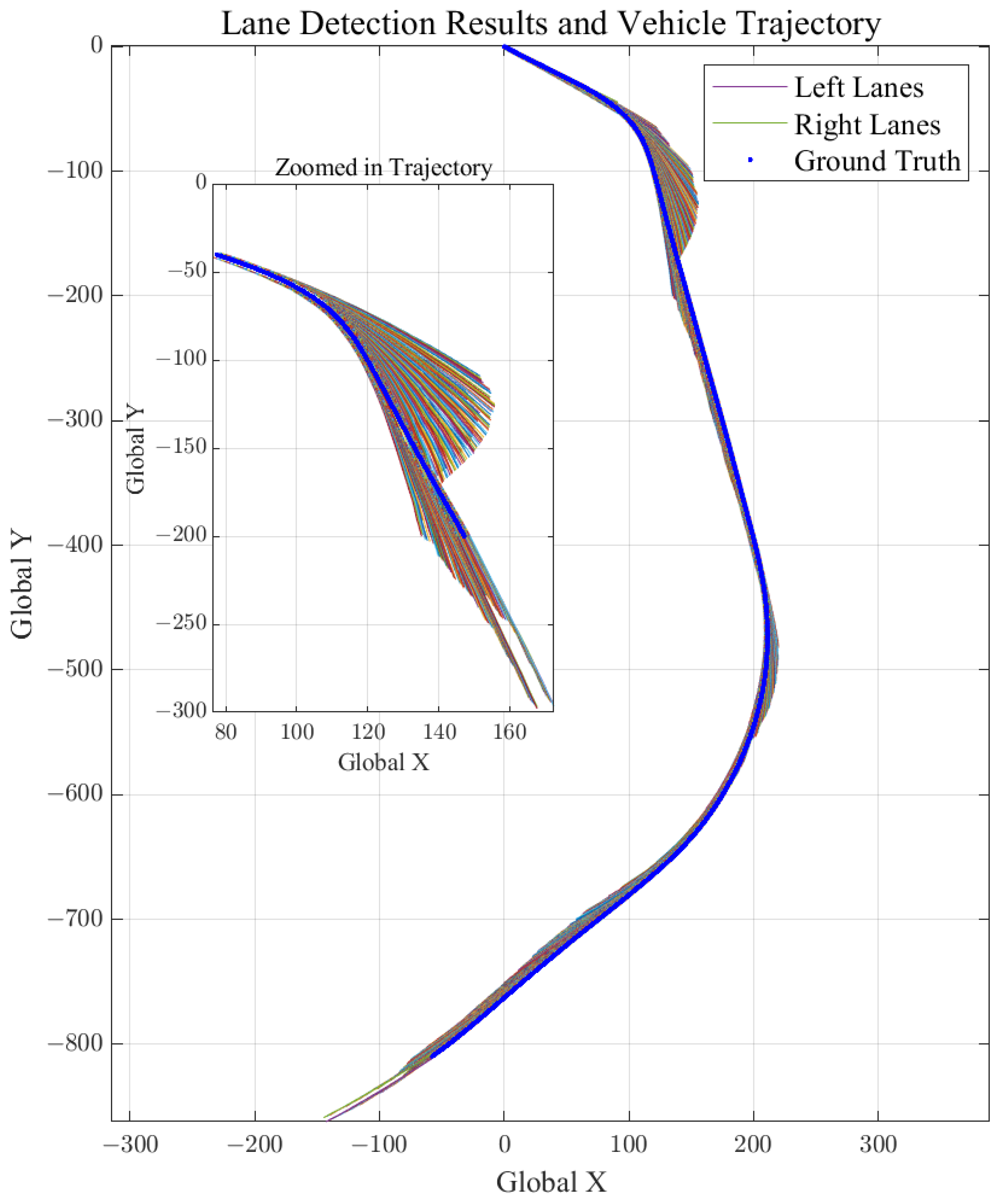
4.3. Lane Detection Results
5. Results
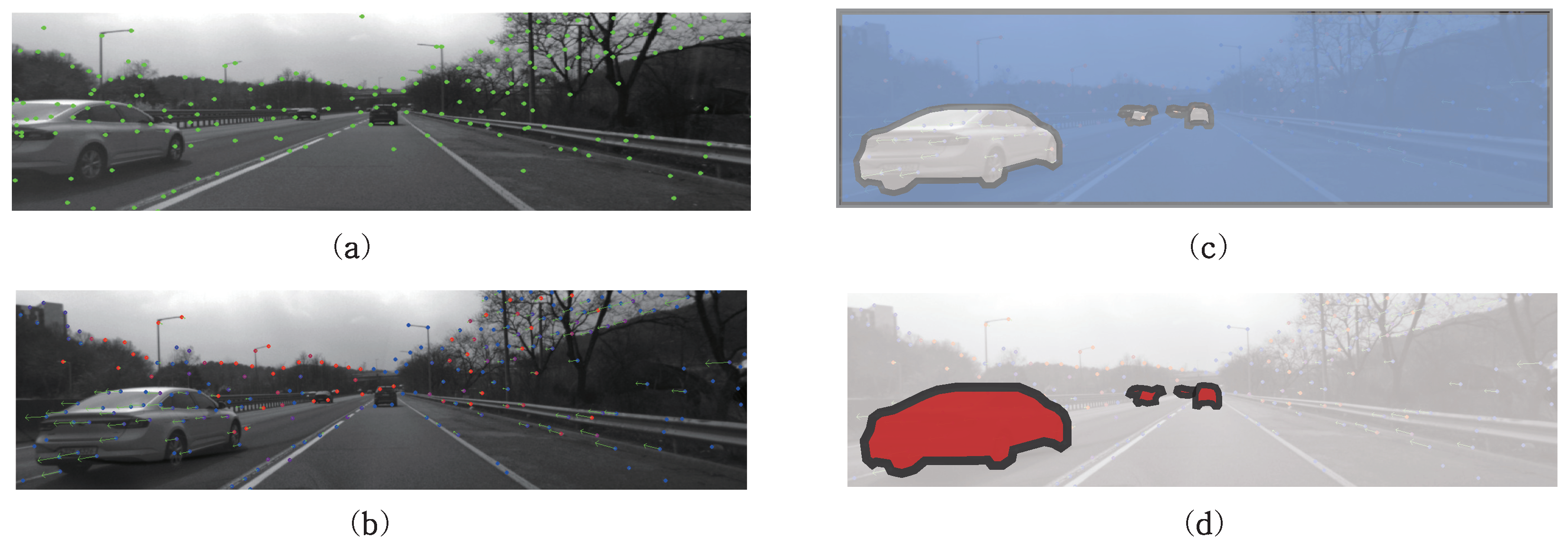
5.1. Comparison Method: VO
5.2. Scenario 1: Initial Stage
5.3. Scenario 2: Straight Road
5.4. Scenario 3: Curved Road
5.5. Scenario 4: Tunnels
5.6. Result Analysis
5.6.1. Localization Performance for Varying Preview Distances
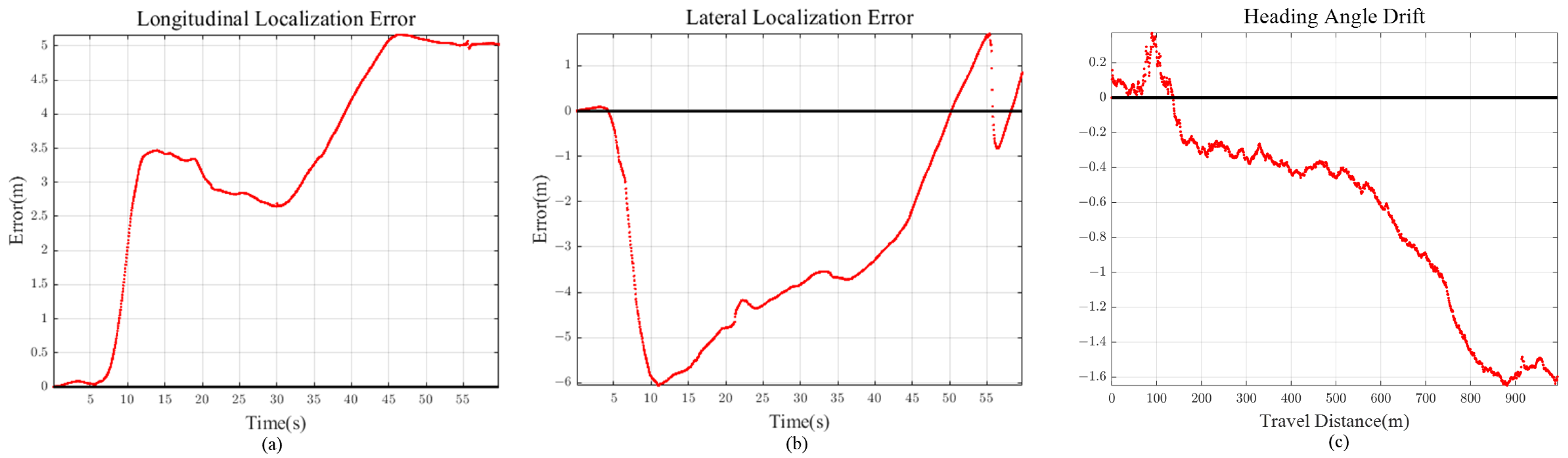
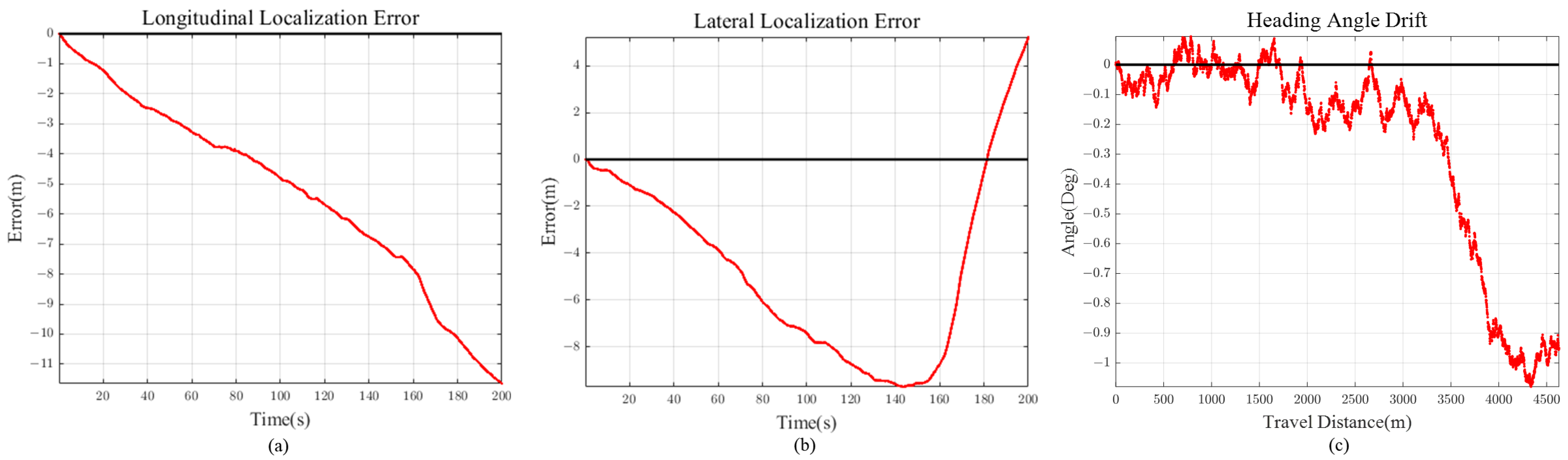
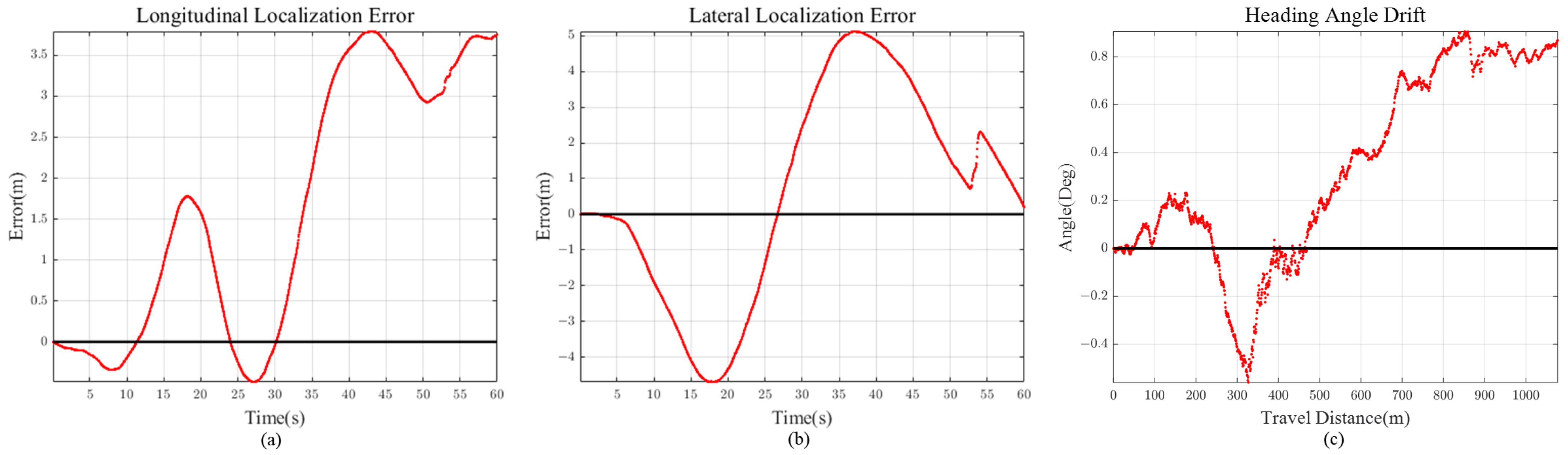
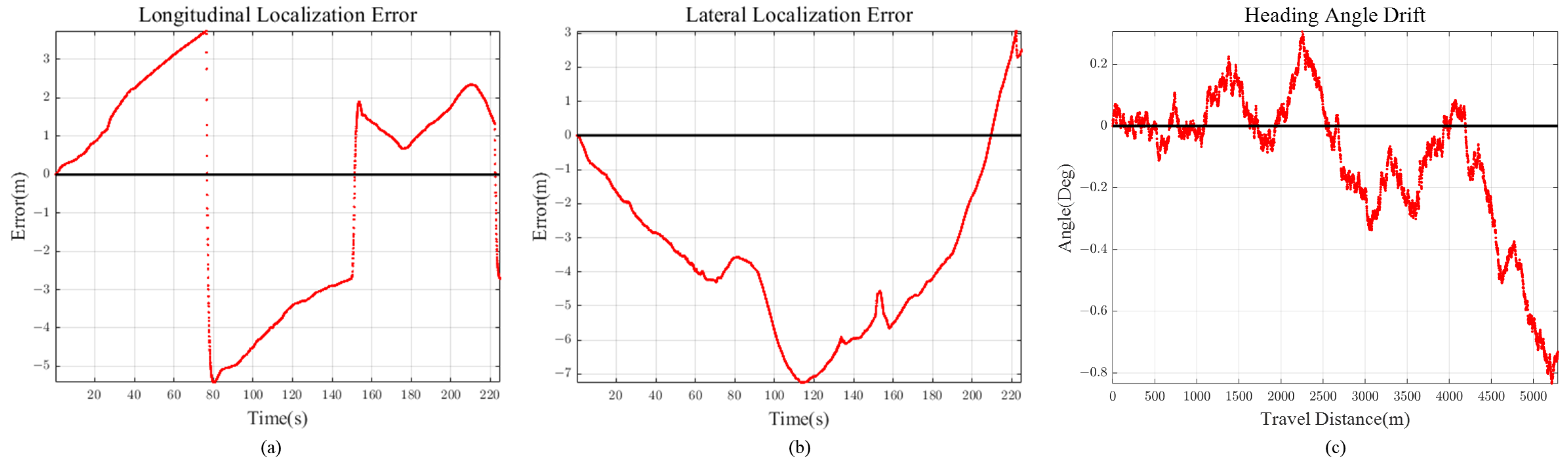
5.6.2. Longitudinal, Lateral Error and Heading Angle Drift of Proposed Method
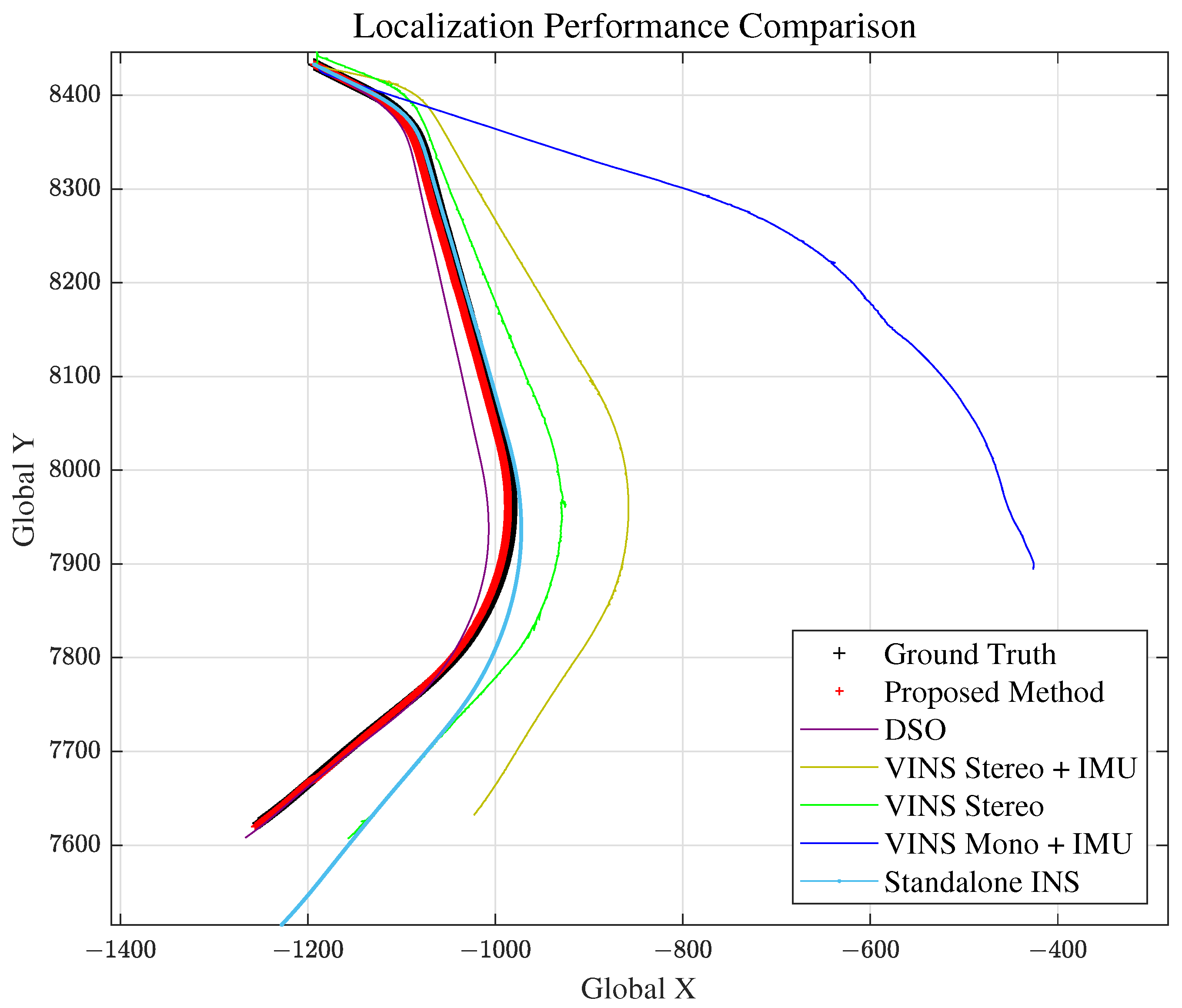
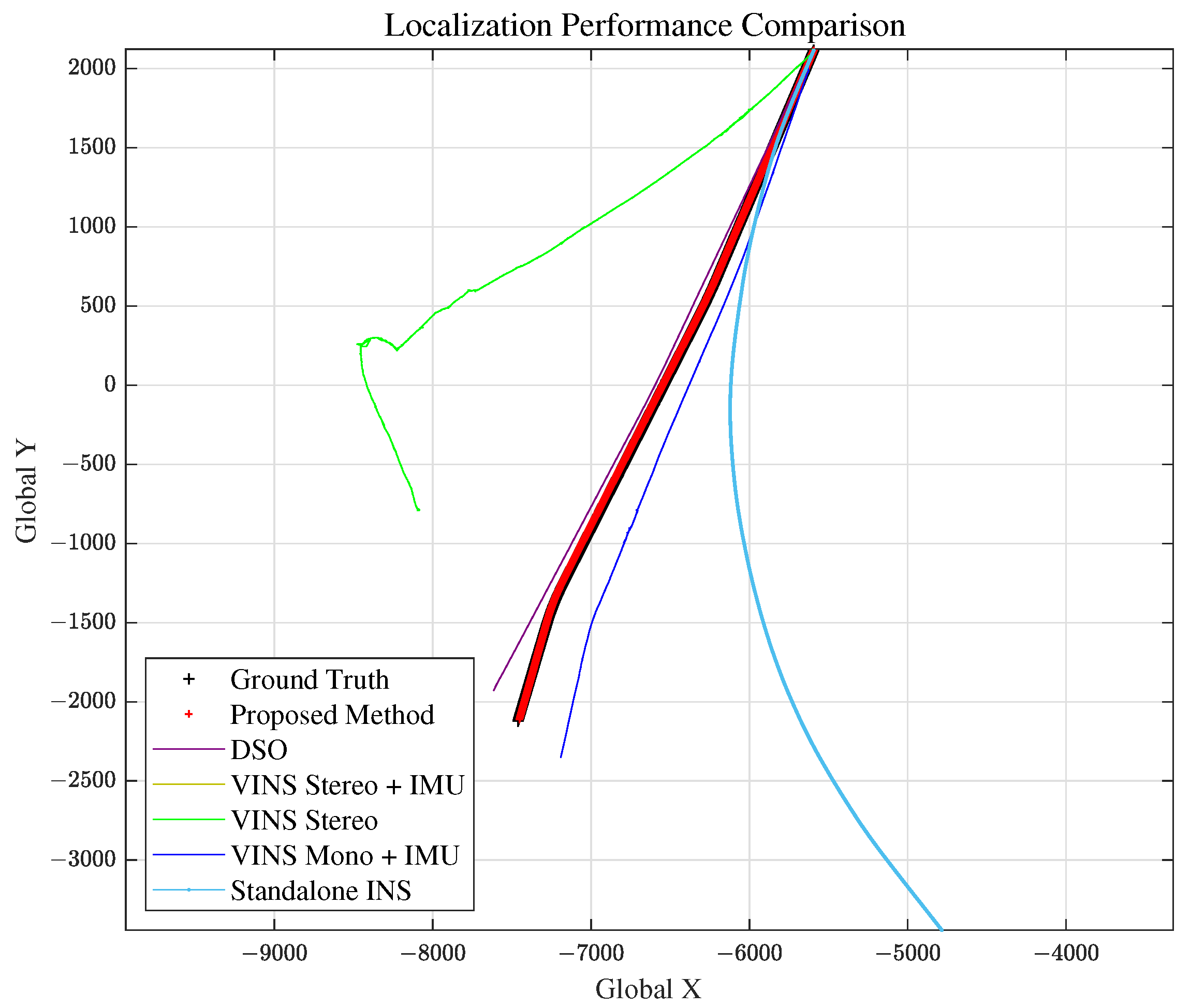
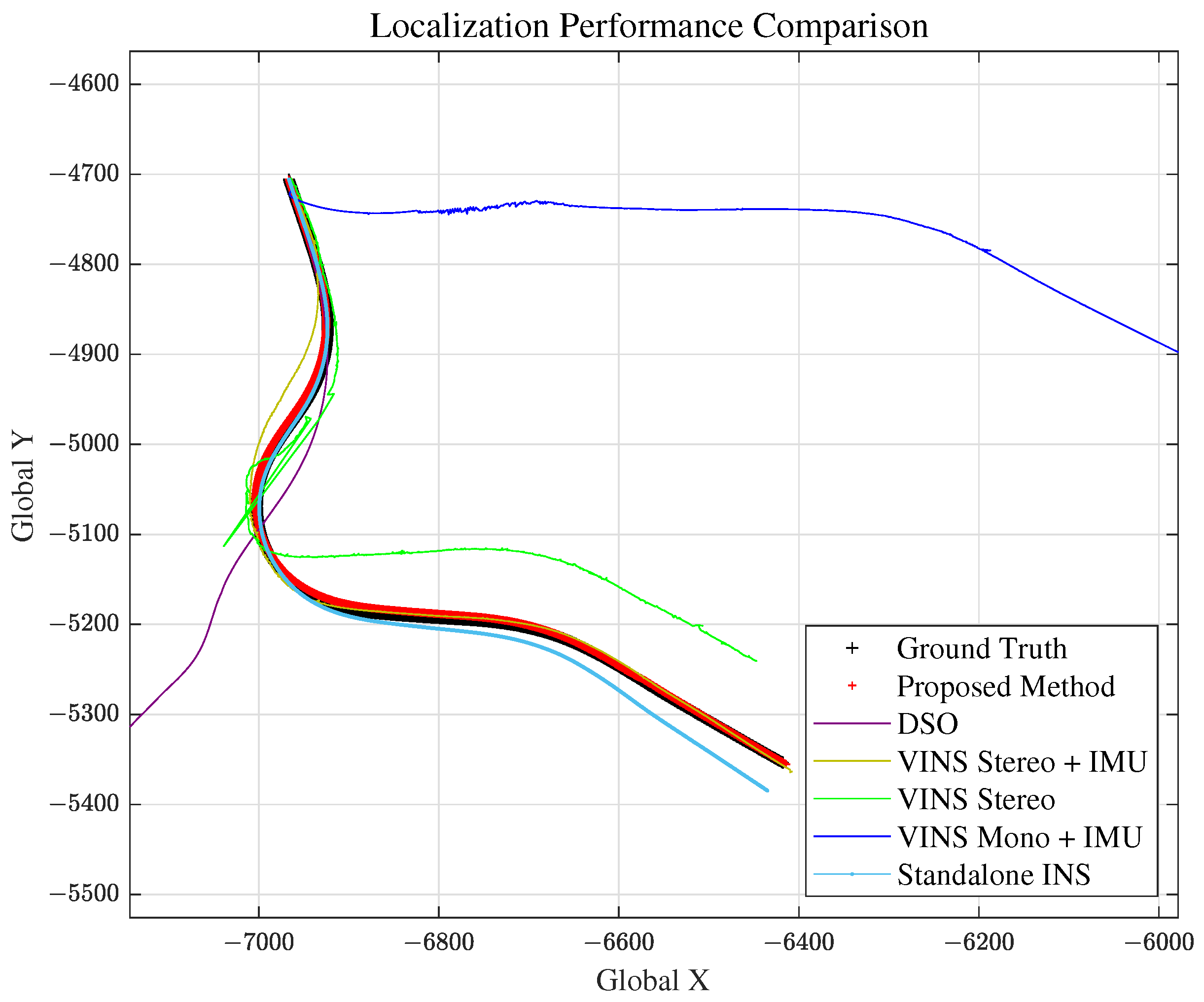
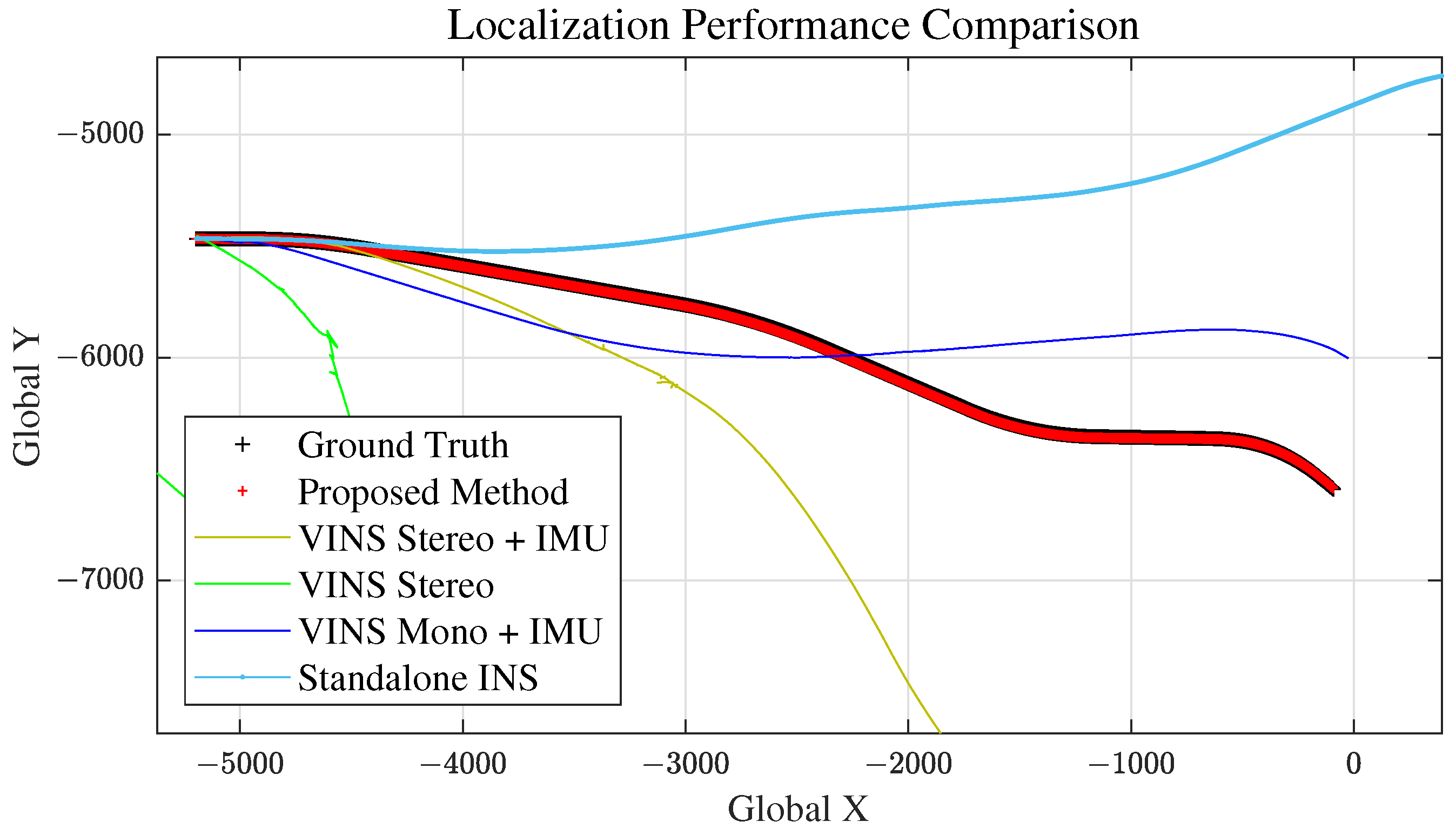
5.6.3. Comparison with Other Methods
6. Conclusions
6.1. Overall Summary
6.2. Future Research Direction
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fouque, C.; Bonnifait, P. Vehicle localization in urban canyons using geo-referenced data and few gnss satellites. IFAC Proc. Vol. 2007, 40, 282–287. [Google Scholar] [CrossRef] [Green Version]
- Jabbour, M.; Cherfaoui, V.; Bonnifait, P. Management of Landmarks in a GIS for an Enhanced Localisation in Urban Areas. In Proceedings of the 2006 IEEE Intelligent Vehicles Symposium, Meguro-Ku, Japan, 13–15 June 2006; pp. 50–57. [Google Scholar]
- Fouque, C.; Bonnifait, P. Tightly coupled GIS data in GNSS fix computation with integrity test. Int. J. Intell. Inf. Database Syst. 2008, 2, 167–186. [Google Scholar] [CrossRef] [Green Version]
- Ragothaman, S. Path Planning for Autonomous Ground Vehicles using GNSS and Cellular LTE Signal Reliability Maps and GIS 3-D Maps; University of California: Riverside, CA, USA, 2018. [Google Scholar]
- Sun, Q.C.; Xia, J.C.; Foster, J.; Falkmer, T.; Lee, H. Pursuing Precise Vehicle Movement Trajectory in Urban Residential Area Using Multi-GNSS RTK Tracking. Transp. Res. Procedia 2017, 25, 2356–2372. [Google Scholar] [CrossRef]
- Feng, Y.; Wang, J. GPS RTK Performance Characteristics and Analysis. J. Glob. Position. Syst. 2008, 7. [Google Scholar] [CrossRef] [Green Version]
- Angrisano, A.; Gioia, C.; Gaglione, S.; Core, G. GNSS Reliability Testing in Signal-Degraded Scenario. Int. J. Navig. Obs. 2013, 2013, 12. [Google Scholar] [CrossRef]
- Cui, Y.; Ge, S.S. Autonomous vehicle positioning with GPS in urban canyon environments. IEEE Trans. Robot. Autom. 2003, 19, 15–25. [Google Scholar] [CrossRef] [Green Version]
- Rabiee, R.; Zhong, X.; Yan, Y.; Tay, W.P. LaIF: A Lane-Level Self-Positioning Scheme for Vehicles in GNSS-Denied Environments. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2944–2961. [Google Scholar] [CrossRef]
- Rose, C.; Britt, J.; Allen, J.; Bevly, D. An Integrated Vehicle Navigation System Utilizing Lane-Detection and Lateral Position Estimation Systems in Difficult Environments for GPS. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2615–2629. [Google Scholar] [CrossRef]
- Schreiber, M.; Knöppel, C.; Franke, U. LaneLoc: Lane marking based localization using highly accurate maps. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast, QLD, Australia, 23–26 June 2013; pp. 449–454. [Google Scholar]
- Angrisano, A. GNSS/INS Integration Methods. Ph.D. Thesis, “Parthenope” University of Naples, Naples, Italy, 2010. [Google Scholar]
- Liu, H.; Nassar, S.; El-Sheimy, N. Two-Filter Smoothing for Accurate INS/GPS Land-Vehicle Navigation in Urban Centers. IEEE Trans. Veh. Technol. 2010, 59, 4256–4267. [Google Scholar] [CrossRef]
- Tang, Y.; Wu, Y.; Wu, M.; Wu, W.; Hu, X.; Shen, L. INS/GPS Integration: Global Observability Analysis. IEEE Trans. Veh. Technol. 2009, 58, 1129–1142. [Google Scholar] [CrossRef]
- Wu, Z.; Yao, M.; Ma, H.; Jia, W. Improving Accuracy of the Vehicle Attitude Estimation for Low-Cost INS/GPS Integration Aided by the GPS-Measured Course Angle. IEEE Trans. Intell. Transp. Syst. 2013, 14, 553–564. [Google Scholar] [CrossRef]
- Li, W.; Leung, H. Constrained unscented Kalman filter based fusion of GPS/INS/digital map for vehicle localization. In Proceedings of the 2003 IEEE International Conference on Intelligent Transportation Systems, Shanghai, China, 12–15 October 2003; Volume 2, pp. 1362–1367. [Google Scholar] [CrossRef]
- Miller, I.; Campbell, M.; Huttenlocher, D. Map-aided localization in sparse global positioning system environments using vision and particle filtering. J. Field Robot. 2011, 28, 619–643. [Google Scholar] [CrossRef]
- Levinson, J.; Montemerlo, M.; Thrun, S. Map-Based Precision Vehicle Localization in Urban Environments. In Robotics: Science and Systems 2007; MIT Press: Cambridge, MA, USA, 2008; Volume 3, pp. 121–128. [Google Scholar]
- Gruyer, D.; Belaroussi, R.; Revilloud, M. Map-aided localization with lateral perception. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; pp. 674–680. [Google Scholar] [CrossRef] [Green Version]
- Lu, W.; Seignez, E.; Rodriguez, F.S.A.; Reynaud, R. Lane marking based vehicle localization using particle filter and multi-kernel estimation. In Proceedings of the 2014 13th International Conference on Control Automation Robotics Vision (ICARCV), Singapore, 10–12 December 2014; pp. 601–606. [Google Scholar] [CrossRef] [Green Version]
- Li, F.; Bonnifait, P.; Ibañez-Guzmán, J. Map-Aided Dead-Reckoning With Lane-Level Maps and Integrity Monitoring. IEEE Trans. Intell. Veh. 2018, 3, 81–91. [Google Scholar] [CrossRef] [Green Version]
- Andrade, D.C.; Bueno, F.; Franco, F.R.; Silva, R.A.; Neme, J.H.Z.; Margraf, E.; Omoto, W.T.; Farinelli, F.A.; Tusset, A.M.; Okida, S.; et al. A Novel Strategy for Road Lane Detection and Tracking Based on a Vehicle’s Forward Monocular Camera. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1497–1507. [Google Scholar] [CrossRef]
- Dewangan, D.K.; Sahu, S.P. Driving Behavior Analysis of Intelligent Vehicle System for Lane Detection Using Vision-Sensor. IEEE Sen. J. 2021, 21, 6367–6375. [Google Scholar] [CrossRef]
- Vivacqua, R.; Vassallo, R.; Martins, F. A Low Cost Sensors Approach for Accurate Vehicle Localization and Autonomous Driving Application. Sensors 2017, 17, 2359. [Google Scholar] [CrossRef]
- Wei, L.; Cappelle, C.; Ruichek, Y.; Zann, F. Intelligent Vehicle Localization in Urban Environments Using EKF-based Visual Odometry and GPS Fusion. IFAC Proc. Vol. 2011, 44, 13776–13781. [Google Scholar] [CrossRef] [Green Version]
- Strydom, R.; Thurrowgood, S.; Srinivasan, M. Visual Odometry: Autonomous UAV Navigation using Optic Flow and Stereo. In Proceedings of the ICRA 2014, Hong Kong, China, 31 May–5 June 2014. [Google Scholar]
- Wahab, A.A.; Khattab, A.; Fahmy, Y.A. Two-way TOA with limited dead reckoning for GPS-free vehicle localization using single RSU. In Proceedings of the 2013 13th International Conference on ITS Telecommunications (ITST), Tampere, Finland, 5–7 November 2013; pp. 244–249. [Google Scholar] [CrossRef]
- Maaref, M.; Khalife, J.; Kassas, Z.M. Lane-Level Localization and Mapping in GNSS-Challenged Environments by Fusing Lidar Data and Cellular Pseudoranges. IEEE Trans. Intell. Veh. 2019, 4, 73–89. [Google Scholar] [CrossRef]
- Chiang, K.W.; Tsai, G.J.; Chu, H.J.; El-Sheimy, N. Performance Enhancement of INS/GNSS/Refreshed-SLAM Integration for Acceptable Lane-Level Navigation Accuracy. IEEE Trans. Veh. Technol. 2020, 69, 2463–2476. [Google Scholar] [CrossRef]
- Kim, J.; Kim, J.; Jang, G.J.; Lee, M. Fast learning method for convolutional neural networks using extreme learning machine and its application to lane detection. Neural Netw. 2017, 87, 109–121. [Google Scholar] [CrossRef]
- Zou, Q.; Jiang, H.; Dai, Q.; Yue, Y.; Chen, L.; Wang, Q. Robust Lane Detection From Continuous Driving Scenes Using Deep Neural Networks. IEEE Trans. Veh. Technol. 2020, 69, 41–54. [Google Scholar] [CrossRef] [Green Version]
- Lu, P.; Cui, C.; Xu, S.; Peng, H.; Wang, F. SUPER: A Novel Lane Detection System. IEEE Trans. Intell. Veh. 2020, 6, 583–593. [Google Scholar] [CrossRef]
- Hwang, Y.; Jeong, Y.; Kweon, I.; Choi, S. Online Misalignment Estimation of Strapdown Navigation for Land Vehicle Under Dynamic Condition. Int. J. Automot. Technol. 2021, 22, 1723–1733. [Google Scholar]
- Hwang, Y. Identifying Vehicle Model Parameters Using Remote Mounted Motion Sensor. IEEE Sens. J. 2021. [Google Scholar] [CrossRef]
- Comma.ai, Inc. Openpilot. Available online: https://github.com/commaai/openpilot (accessed on 16 September 2021).
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef] [Green Version]
- Qin, T.; Shen, S. Online Temporal Calibration for Monocular Visual-Inertial Systems. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 3662–3669. [Google Scholar]
- Qin, T.; Pan, J.; Cao, S.; Shen, S. A General Optimization-based Framework for Local Odometry Estimation with Multiple Sensors. arXiv 2019, arXiv:1901.03638. [Google Scholar]
- Qin, T.; Cao, S.; Pan, J.; Shen, S. A General Optimization-based Framework for Global Pose Estimation with Multiple Sensors. arXiv 2019, arXiv:1901.03642. [Google Scholar]
- Furgale, P.; Rehder, J.; Siegwart, R. Unified temporal and spatial calibration for multi-sensor systems. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1280–1286. [Google Scholar]
- Engel, J.; Koltun, V.; Cremers, D. Direct sparse odometry. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 611–625. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | 10 m | 20 m | 30 m | 40 m | 50 m | 60 m | 70 m | 80 m | 90 m | INS | DSO | VINS1 | VINS2 | VINS3 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE (m) | 14.56 | 15.79 | 8.09 | 5.06 | 7.34 | 9.32 | 9.31 | 9.75 | 9.83 | 41.11 | 48.66 | 132.4 | 55.89 | 456.0 |
| RMSE Lat (m) | 4.26 | 12.22 | 7.15 | 3.52 | 5.06 | 6.61 | 6.62 | 6.98 | 7.05 | 37.13 | 17.04 | 82.14 | 50.51 | 216.4 |
| RMSE Long (m) | 13.92 | 10.00 | 3.78 | 3.63 | 5.32 | 6.57 | 6.55 | 6.81 | 6.86 | 17.63 | 45.58 | 103.9 | 23.95 | 401.4 |
| Max Error (m) | 24.87 | 35.31 | 19.65 | 6.84 | 10.19 | 14.75 | 14.89 | 15.98 | 16.21 | 111.3 | 62.82 | 230.5 | 98.18 | 869.2 |
| Dataset | 10 m | 20 m | 30 m | 40 m | 50 m | 60 m | 70 m | 80 m | 90 m | INS | DSO | VINS1 | VINS2 | VINS3 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE (m) | 447.9 | 161.6 | 62.26 | 22.24 | 12.56 | 9.05 | 8.89 | 8.60 | 8.56 | 1175 | 334.5 | x | 1315 | 342.4 |
| RMSE Lat (m) | 423.7 | 156.7 | 59.93 | 20.28 | 10.38 | 6.86 | 6.40 | 6.07 | 6.04 | 1161 | 93.63 | x | 1214 | 182.5 |
| RMSE Long (m) | 145.3 | 39.6 | 16.86 | 9.13 | 7.07 | 6.28 | 6.16 | 6.08 | 6.07 | 166.9 | 321.1 | x | 465.6 | 289.6 |
| Max Error (m) | 771.2 | 339.2 | 127.6 | 38.05 | 19.01 | 13.58 | 12.80 | 12.71 | 12.77 | 2984 | 490.7 | x | 1981 | 650.5 |
| Dataset | 10 m | 20 m | 30 m | 40 m | 50 m | 60 m | 70 m | 80 m | 90 m | INS | DSO | VINS1 | VINS2 | VINS3 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE (m) | 25.94 | 13.69 | 7.88 | 4.57 | 4.13 | 4.03 | 3.91 | 3.84 | 3.81 | 13.57 | 284.9 | 28.02 | 65.93 | 428.3 |
| RMSE Lat (m) | 23.80 | 13.08 | 6.00 | 2.57 | 2.68 | 3.08 | 3.01 | 3.05 | 3.05 | 12.85 | 130.9 | 11.33 | 31.81 | 379.4 |
| RMSE Long (m) | 10.32 | 4.03 | 5.09 | 3.78 | 3.15 | 2.61 | 2.49 | 2.33 | 2.28 | 4.36 | 253.0 | 25.62 | 57.75 | 198.6 |
| Max Error (m) | 67.87 | 37.57 | 19.32 | 7.95 | 6.46 | 6.45 | 6.24 | 6.12 | 6.07 | 35.5 | 723.2 | 61.04 | 196.5 | 632.5 |
| Dataset | 10 m | 20 m | 30 m | 40 m | 50 m | 60 m | 70 m | 80 m | 90 m | INS | DSO | VINS1 | VINS2 | VINS3 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE (m) | 753.5 | 152.1 | 46.21 | 10.92 | 5.12 | 5.26 | 5.43 | 5.61 | 5.66 | 990.6 | x | 1146 | 3914 | 1489 |
| RMSE Lat (m) | 695.0 | 146.9 | 44.67 | 10.32 | 4.31 | 4.44 | 4.63 | 4.85 | 4.92 | 950.8 | x | 1111 | 3647 | 313.0 |
| RMSE Long (m) | 291.2 | 39.32 | 11.84 | 3.57 | 2.78 | 2.82 | 2.83 | 2.82 | 2.80 | 277.9 | x | 280.8 | 1422 | 1422 |
| Max Error (m) | 1576 | 337.5 | 100.5 | 17.65 | 8.20 | 9.79 | 10.70 | 10.93 | 10.81 | 2088 | x | 2583 | 6946 | 2429 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeon, J.; Hwang, Y.; Jeong, Y.; Park, S.; Kweon, I.S.; Choi, S.B. Lane Detection Aided Online Dead Reckoning for GNSS Denied Environments. Sensors 2021, 21, 6805. https://doi.org/10.3390/s21206805
Jeon J, Hwang Y, Jeong Y, Park S, Kweon IS, Choi SB. Lane Detection Aided Online Dead Reckoning for GNSS Denied Environments. Sensors. 2021; 21(20):6805. https://doi.org/10.3390/s21206805
Chicago/Turabian StyleJeon, Jinhwan, Yoonjin Hwang, Yongseop Jeong, Sangdon Park, In So Kweon, and Seibum B. Choi. 2021. "Lane Detection Aided Online Dead Reckoning for GNSS Denied Environments" Sensors 21, no. 20: 6805. https://doi.org/10.3390/s21206805
APA StyleJeon, J., Hwang, Y., Jeong, Y., Park, S., Kweon, I. S., & Choi, S. B. (2021). Lane Detection Aided Online Dead Reckoning for GNSS Denied Environments. Sensors, 21(20), 6805. https://doi.org/10.3390/s21206805