
Using Multi-Antenna Trajectory Constraint to Analyze BeiDou Carrier-Phase Observation Error of Dynamic Receivers


Abstract
:1. Introduction
2. Determination Method of Carrier Phase Cycle-Slip and Measurement Error
2.1. Experimental Scheme Design
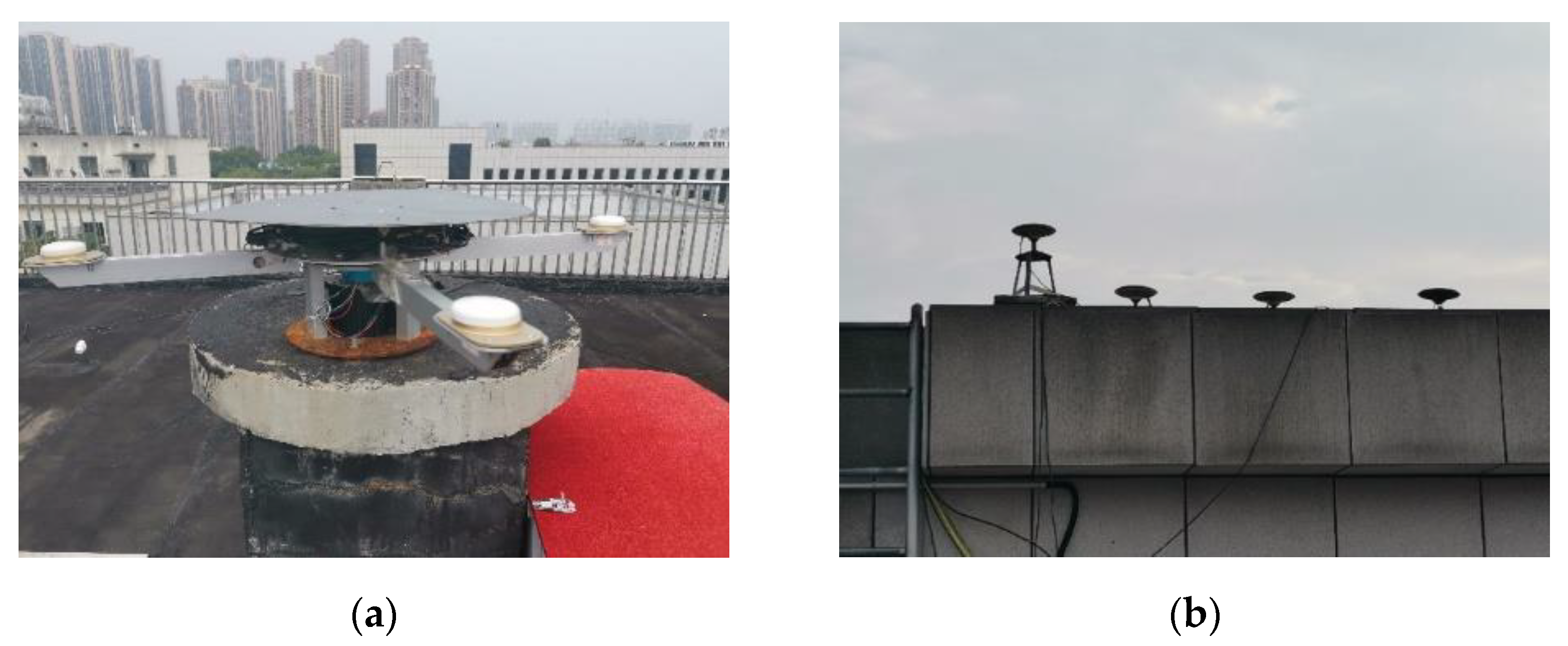
- (a)
- Installing the equipment and collecting data. Install four antennae on a rotating platform of the same radius as the dynamic antennae, at intervals of 90° (as shown at the top of Figure 2), and installed two static antennae not far away. Collect data as needed for calibration and in the calculation of dynamic results.
- (b)
- Calibrating coordinates and relative positions. Calibrate the exact position of the static antennae and the relative positioning relationships between the dynamic antennae, and then calculated the motion trajectories of the antennae. After obtaining the above parameters, set the platform set to rotate at a uniform speed and began collecting data. The calibration method and contents are shown in Figure 3.
- (c)
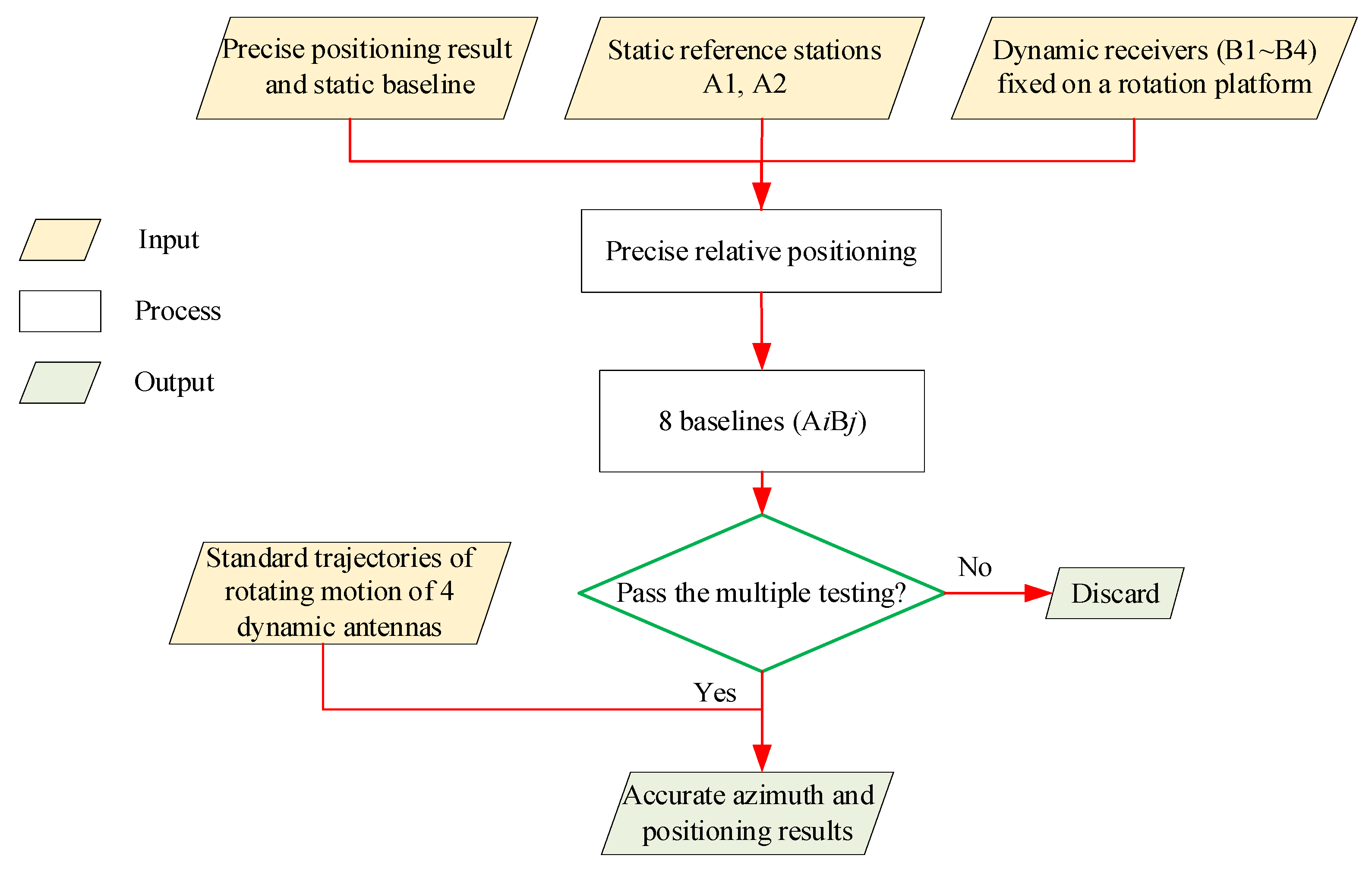
- Calculating precise and effective relative positioning results. Calculate the relative position of each dynamic antenna relative to the static antennae according to the collected data. In addition, since the orientation of the rotation axis of the rotating platform is fixed, when the body coordinate system of the rotating platform is defined, the real position of all dynamic antennae can be described by an azimuth parameter (similar to yaw angle). The schematic diagram is shown in Figure 4.
- (d)
- Multiply test to ensure the accuracy of the positioning results. Error analysis requires sufficiently accurate positioning data as reference. Even for ultra-short baselines, there will be some epochs without a solution or with a wrong solution in long-term data, which is unfavorable to error analysis. In order to obtain reliable reference results, multiple testing is required for the positioning results at each time point.
- (i)
- Comparing the positioning results with antennae trajectories. If the deviation is too large (for example, horizontal deviation: >5 cm or the elevation deviation: >7 cm), we discarded it.
- (ii)
- The relative positioning results from the dynamic antennae to the two static antennae need to be checked by a closure error test. Theoretically, the sum of the baseline vectors from the dynamic antenna to the two static antennae and the baseline vector of the two static antennae should be zero. Therefore, the position of the dynamic antennae can be considered accurate only when the sum of the three baseline vectors is lower than the given threshold in three-dimensional space (for example, 3D threshold = 8 cm).
- (iii)
- According to the positioning results, the azimuth of platform rotation can be calculated, and the positioning results corresponding to the azimuth with excessive deviation should be discarded.
2.2. Using a Multi-Antennae Trajectory Constraint to Improve the Success Rate of Precision Relative Positioning in the Post-Processing Mode
2.2.1. Geometric Constraints Aided Ambiguity Searching
2.2.2. Interpolation Calculation and Secondary Processing
- (a)
- Take the interpolated antenna position as the initial position, and then solve the float ambiguity calculation equation.
- (b)
- Use LAMBDA to search the fixed ambiguity solution. As the initial value is more accurate, the success rate of this step will increase.
- (c)
- Integrate the results of other antennae to obtain the accurate position.
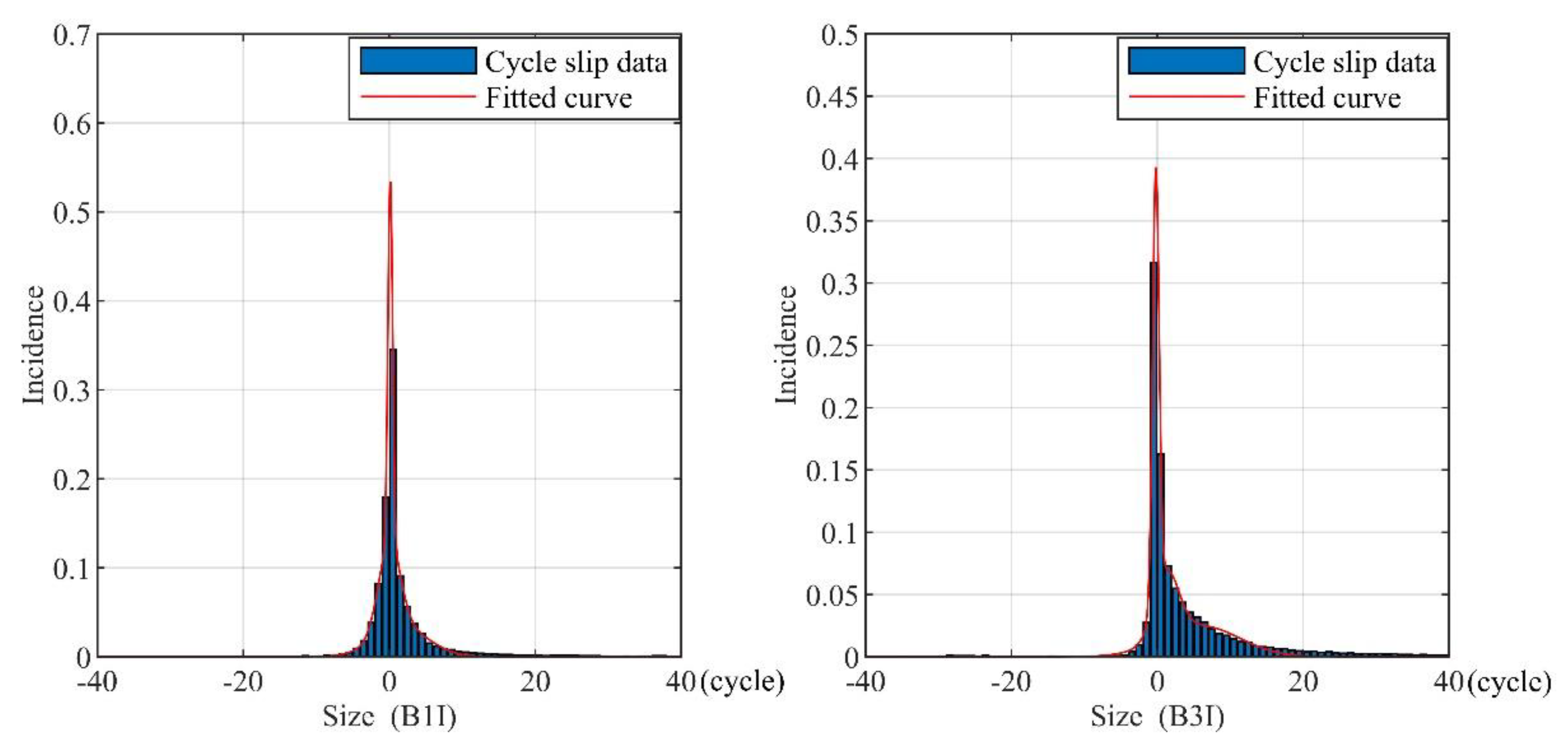
2.3. Using the Mixture of Gaussian Distribution to Model Carrier-Phase Cycle Slips
2.4. Using the Bi-Normal Distribution to Model Carrier Phase Measurement Error
3. Experimental Results and Analysis
3.1. The Effect of Geometric Constraints-Aided Ambiguity Searching
3.2. The Result of Interpolation Calculation and Secondary Processing
3.3. Cycle-Slip Characteristics of the Dynamic Receiver
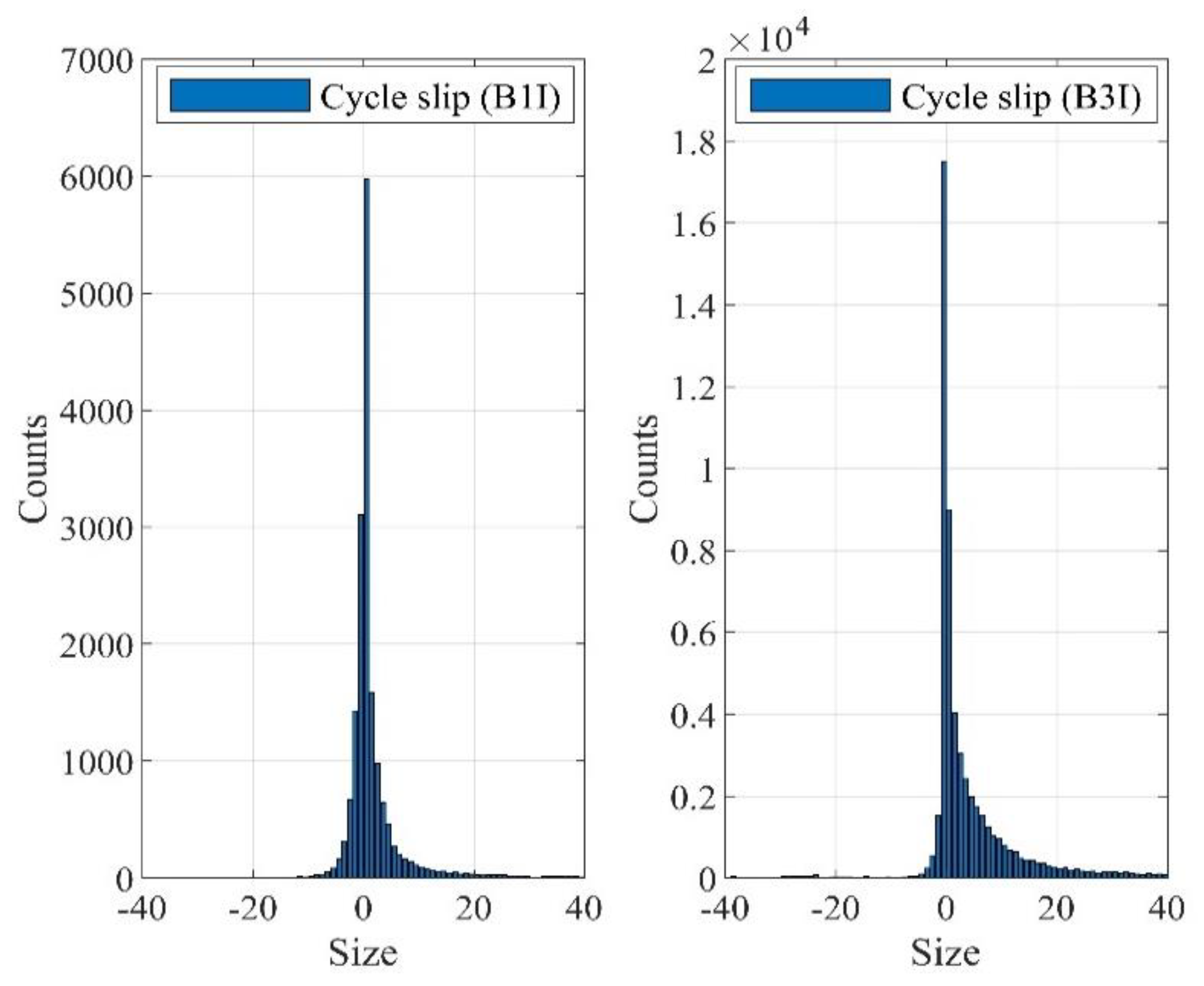
3.3.1. The Distribution Characteristics of Cycle Slips
3.3.2. The Relationship between Cycle-Slip Incidence and SNR
3.4. Carrier-Phase Measurement-Error Characteristics Analysis
3.4.1. Distribution of Carrier-Phase Measurement Error
3.4.2. Relationship among Carrier Phase Measurement Error and Orbit
4. Conclusions
5. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lee, Y. A Position Domain Relative RAIM Method. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 85–97. [Google Scholar] [CrossRef]
- Li, Q.; Dong, Y.; Wang, D.; Zhang, L.; Wu, J. A real-time inertial-aided cycle slip detection method based on ARIMA-GARCH model for inaccurate lever arm conditions. GPS Solut. 2021, 5, 26. [Google Scholar] [CrossRef]
- Chen, D.; Ye, S.; Zhou, W.; Liu, Y.; Peng, J.; Tang, W.; Zhao, L. A double-differenced cycle slip detection and repair method for GNSS CORS network. GPS Solut. 2016, 20, 439–450. [Google Scholar] [CrossRef]
- Chen, K.; Chang, G.; Chen, C.; Zhu, T. An improved TDCP-GNSS/INS integration scheme considering small cycle slip for low-cost land vehicular applications. Meas. Sci. Technol. 2021, 32, 055006. [Google Scholar] [CrossRef]
- Dominik, P.; Maciej, G. Analysis of the Impact of Multipath on Galileo System Measurements. Remote Sens. 2021, 13, 2295. [Google Scholar]
- Li, Q.; Xia, L.; Chan, T.; Xia, J.; Geng, J.; Zhu, H.; Cai, Y. Intrinsic Identification and Mitigation of Multipath for Enhanced GNSS Positioning. Sensors 2021, 21, 188. [Google Scholar] [CrossRef] [PubMed]
- Lu, R.; Chen, W.; Dong, D.; Wang, Z.; Zhang, C.; Peng, Y.; Yu, C. Multipath mitigation in GNSS precise point positioning based on trend-surface analysis and multipath hemispherical map. GPS Solut. 2021, 25, 119. [Google Scholar] [CrossRef]
- Laurent, M.; Ouafae, M.; Frédéric, D.; Nicolas, J.; Follin, J.M.; Durand, S.; Pottiaux, E.; de Oliveira, P.S., Jr. On the relation between GPS tropospheric gradients and the local topography. Adv. Space Res. 2021, 68, 1676–1689. [Google Scholar]
- Guo, K.; Vadakke, V.; Weaver, B.; Aquino, M. Mitigating high latitude ionospheric scintillation effects on GNSS Precise Point Positioning exploiting 1-s scintillation indices. J. Geod. 2021, 95, 1–15. [Google Scholar] [CrossRef]
- Zhang, Z.; Lou, Y.; Zheng, F.; Gu, S. ON GLONASS pseudo-range inter-frequency bias solution with ionospheric delay modeling and the undifferenced uncombined PPP. J. Geod. 2021, 95, 1–29. [Google Scholar] [CrossRef]
- Vani, B.; Forte, B.; Monico, J.; Skone, S.; Shimabukuro, M.H.; De Oliveira Moraes, A.; Marques, H.A. A Novel Approach to Improve GNSS Precise Point Positioning During Strong Ionospheric Scintillation: Theory and Demonstration. IEEE Trans. Veh. Technol. 2019, 68, 4391–4403. [Google Scholar] [CrossRef]
- Zha, J.; Zhang, B.; Yuan, Y.; Zhang, X.; Li, M. Use of modified carrier-to-code leveling to analyze temperature dependence of multi-GNSS receiver DCB and to retrieve ionospheric TEC. GPS Solut. 2019, 23, 103. [Google Scholar] [CrossRef]
- Roland, H.; Simon, H.; Alain, G. Dynamic displacements from high-rate GNSS: Error modeling and vibration detection. Measurement 2020, 157, 107655. [Google Scholar]
- Luis, G.; Sergio, B.; Chris, A.; Pascual, G. Development of a Submillimetric GNSS-Based Distance Meter for Length Metrology. Sensors 2021, 21, 1145. [Google Scholar]
- Veton, H.; Bojan, S.; Tomaž, A.; Goran, T.; Oskar, S. Testing Multi-Frequency Low-Cost GNSS Receivers for Geodetic Monitoring Purposes. Sensors 2020, 20, 4375. [Google Scholar]
- Lyu, Z.; Gao, Y. An SVM Based Weight Scheme for Improving Kinematic GNSS Positioning Accuracy with Low-Cost GNSS Receiver in Urban Environments. Sensors 2020, 20, 7265. [Google Scholar] [CrossRef]
- Tomasz, S.; Cezary, S.; Pawel, S.; Mariusz, S. Comparative analysis of positioning accuracy of Garmin Forerunner wearable GNSS receivers in dynamic testing. Measurement 2021, 183, 109846. [Google Scholar]
- Li, G.; Geng, J. Characteristics of raw multi-GNSS measurement error from Google Android smart devices. GPS Solut. 2019, 23, 90. [Google Scholar] [CrossRef]
- Chen, B.; Gao, C.; Liu, Y.; Sun, P. Real-time Precise Point Positioning with a Xiaomi MI 8 Android Smartphone. Sensors 2019, 19, 2835. [Google Scholar] [CrossRef] [Green Version]
- Gao, R.; Xu, L.; Zhang, B.; Liu, T. Raw GNSS observations from Android smartphones: Characteristics and short-baseline RTK positioning performance. Sensors 2021, 32, 084012. [Google Scholar]
- Lawrence, L.; Paul, C. Investigations into phase multipath mitigation techniques for high precision positioning in difficult environments. J. Navig. 2007, 60, 4457–4482. [Google Scholar]
- Quan, Y.; Lawrence, L. Development of a trajectory constrained rotating arm rig for testing GNSS kinematic positioning. Measurement 2019, 140, 479–485. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Success probability of integer GPS ambiguity rounding and bootstrapping. J. Geod. 1998, 72, 606–612. [Google Scholar] [CrossRef] [Green Version]
- Teunissen, P.J.G. An optimality property of the integer least-squares estimator. J. Geod. 1999, 73, 587–593. [Google Scholar] [CrossRef]
- Ye, X.; Wei, X.; Liu, W.; Ni, S.; Wang, F. Influence of Pseudorange Biases on Single Epoch GNSS Integer Ambiguity Resolution. IEEE Access 2020, 8, 112496–112506. [Google Scholar] [CrossRef]
- Gabela, J.; Kealy, A.; Li, S.; Hedley, M.; Moran, W.; Ni, W.; Williams, S. The Effect of Linear Approximation and Gaussian Noise Assumption in Multi-Sensor Positioning through Experimental Evaluation. IEEE Sens. J. 2019, 19, 10719–10727. [Google Scholar] [CrossRef]
- Mariusz, S. Consistency of the Empirical Distributions of Navigation Positioning System Errors with Theoretical Distributions—Comparative Analysis of the DGPS and EGNOS Systems in the Years 2006 and 2014. Sensors 2021, 21, 31. [Google Scholar]
- Yun, H.; Yun, Y.; Kee, C. Carrier Phase-based RAIM Algorithm Using a Gaussian Sum Filter. J. Navig. 2011, 64, 75–90. [Google Scholar] [CrossRef]
- Feng, S.; Jokinen, A.; Ochieng, W.; Liu, J.; Zeng, Q. Receiver Autonomous Integrity Monitoring for Fixed Ambiguity Precise Point Positioning. In Proceedings of the China Satellite Navigation Conference (CSNC) 2014, Nanjing, China, 21–23 May 2014; Volume 304, pp. 159–169. [Google Scholar]
- Song, Y.; Li, Q.; Dong, Y.; Wang, D.; Wu, J. Error Modeling and Integrity Risk Analysis in SPP. In Proceedings of the China Satellite Navigation Conference (CSNC) 2020, Chengdu, China, 23–25 May 2020; Volume 2, pp. 651–662. [Google Scholar]
- Padma, B.; Kai, B. Performance analysis of dual-frequency receiver using combinations of GPS L1, L5 and L2 civil signals. J. Geod. 2019, 93, 437–447. [Google Scholar]
- Demyanov, V.V.; Yasyukevich, Y.V.; Jin, S.; Sergeeva, M.A. The Second-Order Derivative of GPS Carrier Phase as a Promising Means for Ionospheric Scintillation Research. Pure Appl. Geophys. 2019, 176, 4555–4573. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Solvable Epoch | Traditional Method | Geometric Constraints Method | Satellite Number (Min) | Satellite Number (Max) |
|---|---|---|---|---|---|
| GPS | 9409 | 9108 | 9338 | 5 | 9 |
| GPS + BDS | 9414 | 9332 | 9310 | 21 | 27 |
| Steps | A1B1/A2B1 | A1B2/A2B2 | A1B3/A2B3 | A1B4/A2B4 |
|---|---|---|---|---|
| Move to static precise relative positioning | 4,319,319/4,319,644 | 4,319,688/4,320,046 | 4,318,656/4,319,033 | 4,318,900/4,319,280 |
| Closure error test | 4,316,937 | 4,316,677 | 4,316,478 | 4,316,870 |
| Integrated processing | 4,319,191 | |||
| Interpolation processing | 4,324,975 (increased 5784 epochs) | |||
| Secondary processing | 4,325,669/4,325,803 | 4,325,595/4,325,786 | 4,325,634/4,325,800 | 4,325,577/4,325,723 |
| Closure error test | 4,324,550 | 4,324,531 | 4,324,575 | 4,324,383 |
| Integrated processing | 4,325,062 | |||
| Interpolation processing | 4,325,400 (increased 338 epochs) | |||
| Interval | B1I | B3I | Interval | B1I | B3I |
|---|---|---|---|---|---|
| ≤−40 | 878 | 650 | (0, 5) | 9178 | 18,486 |
| (−40, −35] | 0 | 78 | [5, 10) | 1235 | 7541 |
| (−35, −30] | 0 | 67 | [10, 15) | 398 | 3565 |
| (−30, −25] | 5 | 221 | [15, 20) | 213 | 1887 |
| (−25, −20] | 4 | 150 | [20, 25) | 141 | 1173 |
| (−20, −15] | 10 | 110 | [25, 30) | 106 | 753 |
| (−15, −10] | 46 | 51 | [30, 35) | 43 | 636 |
| (−10, −5] | 348 | 229 | [35, 40) | 73 | 432 |
| (−5, −0) | 5523 | 19,781 | ≥−40 | 1563 | 4275 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, C.; Li, Q.; Wang, D.; Wu, J. Using Multi-Antenna Trajectory Constraint to Analyze BeiDou Carrier-Phase Observation Error of Dynamic Receivers. Sensors 2021, 21, 6930. https://doi.org/10.3390/s21206930
Xiong C, Li Q, Wang D, Wu J. Using Multi-Antenna Trajectory Constraint to Analyze BeiDou Carrier-Phase Observation Error of Dynamic Receivers. Sensors. 2021; 21(20):6930. https://doi.org/10.3390/s21206930
Chicago/Turabian StyleXiong, Chenyao, Qingsong Li, Dingjie Wang, and Jie Wu. 2021. "Using Multi-Antenna Trajectory Constraint to Analyze BeiDou Carrier-Phase Observation Error of Dynamic Receivers" Sensors 21, no. 20: 6930. https://doi.org/10.3390/s21206930
APA StyleXiong, C., Li, Q., Wang, D., & Wu, J. (2021). Using Multi-Antenna Trajectory Constraint to Analyze BeiDou Carrier-Phase Observation Error of Dynamic Receivers. Sensors, 21(20), 6930. https://doi.org/10.3390/s21206930