
KOSMOS: An Open Source Underwater Video Lander for Monitoring Coastal Fishes and Habitats

 ,
,  , , and
, , and
Abstract
:1. Introduction
2. Materials
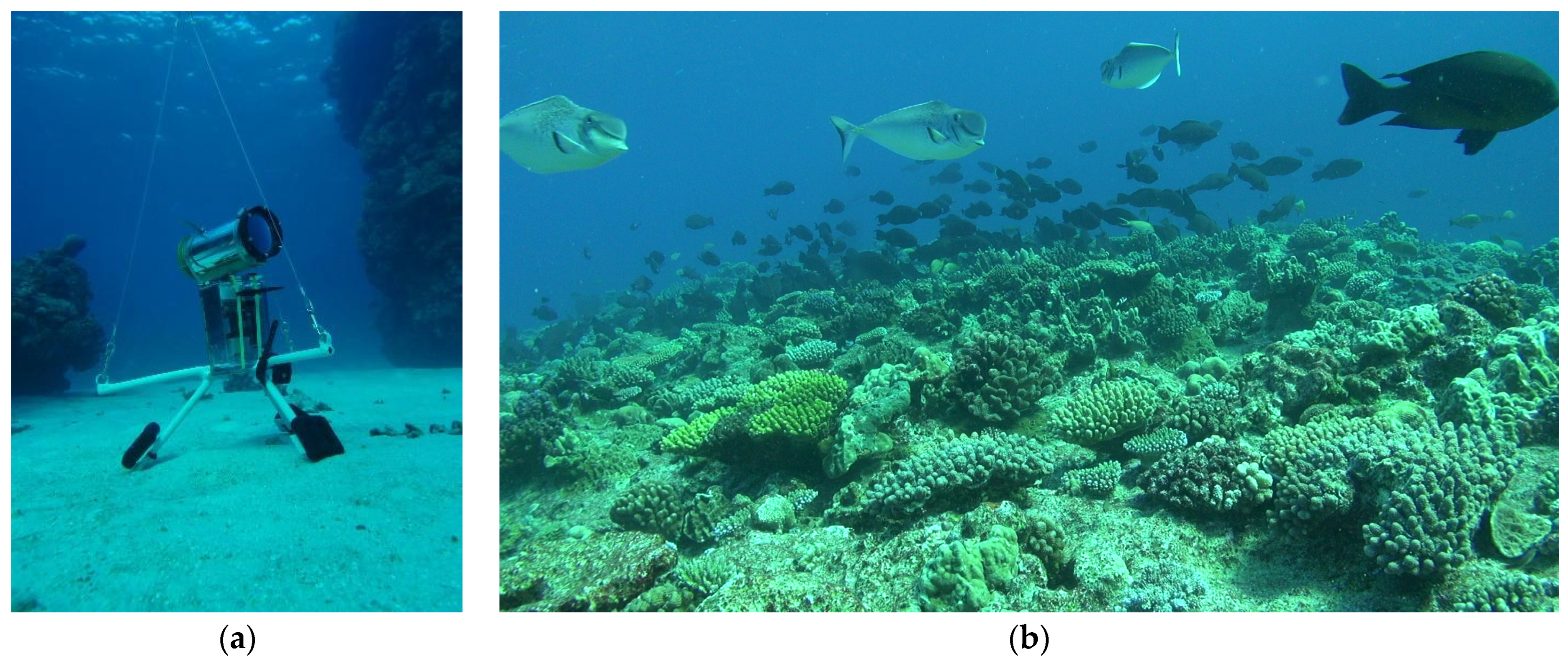
2.1. Specifications of the STAVIRO System
2.2. Specifications for the KOSMOS System
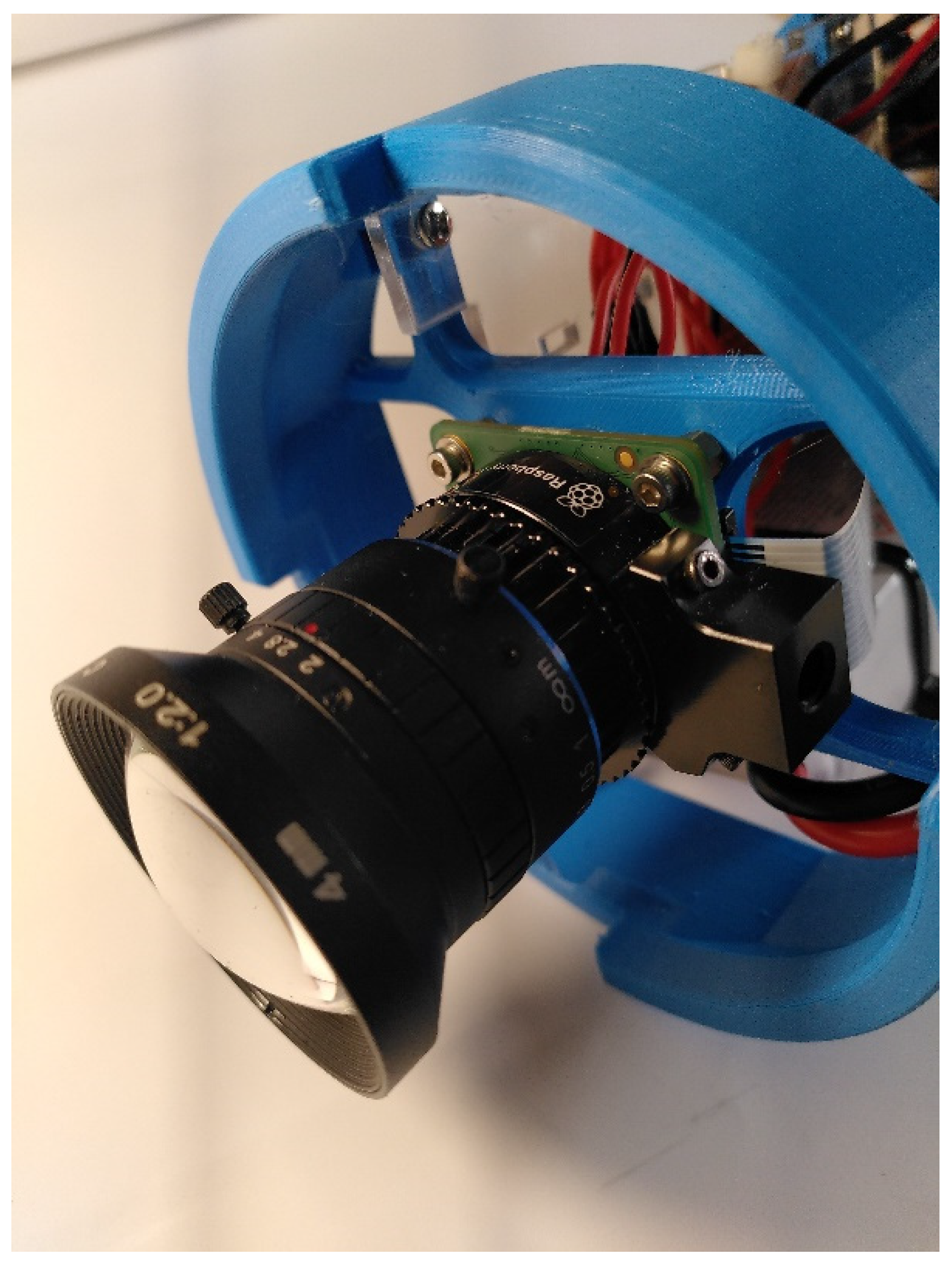
2.2.1. Optics
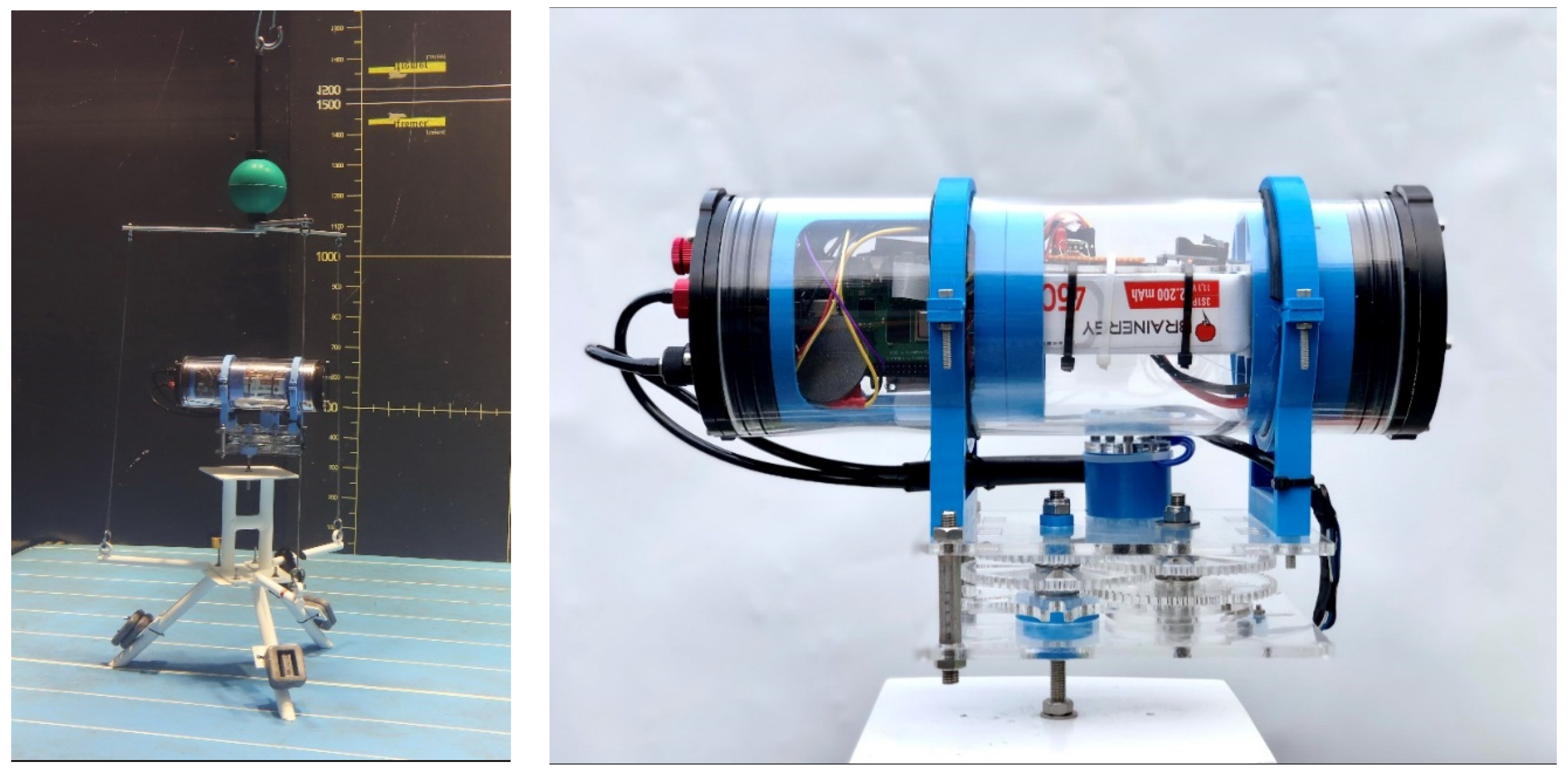
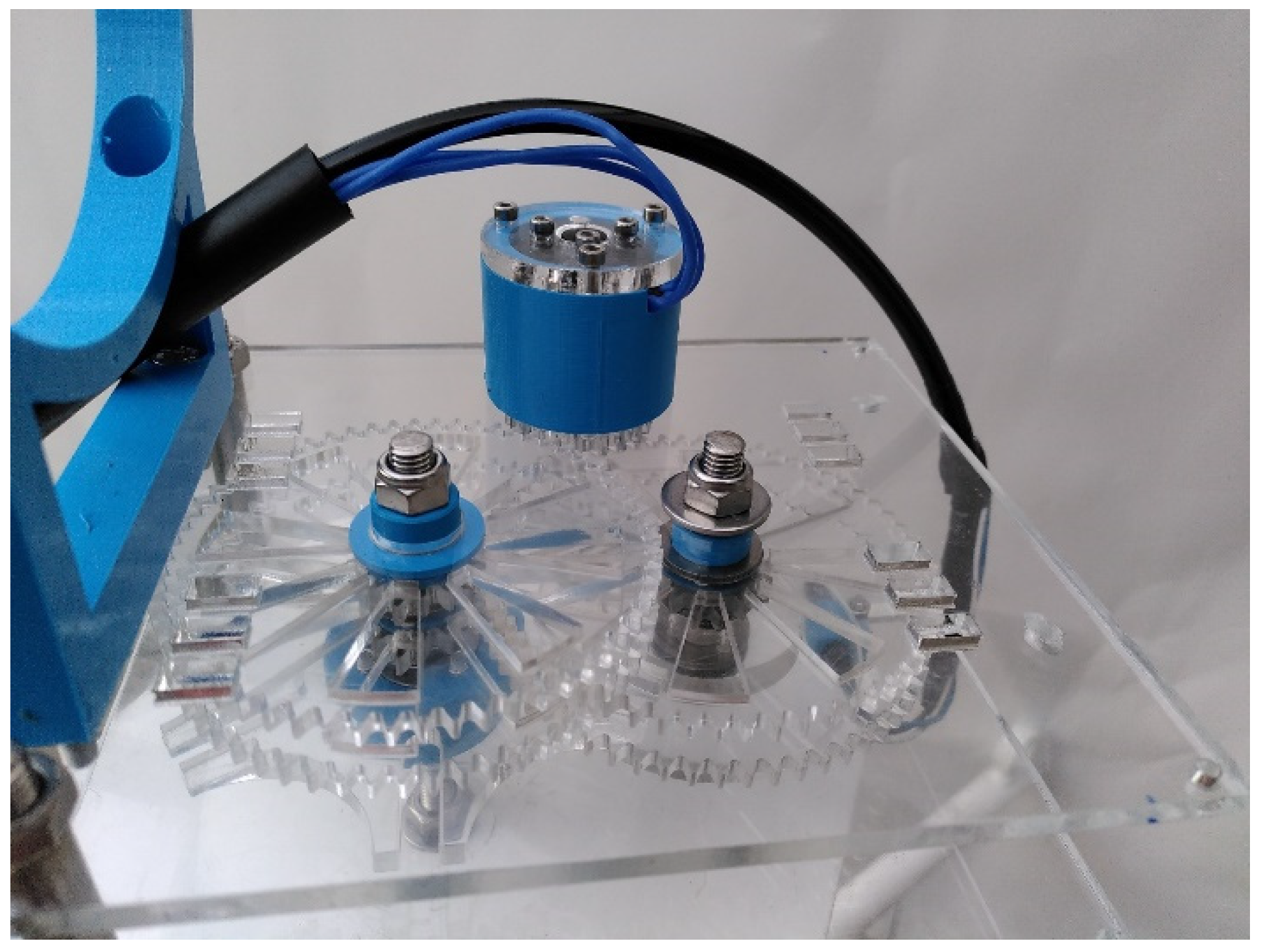
2.2.2. Mechanical Integration
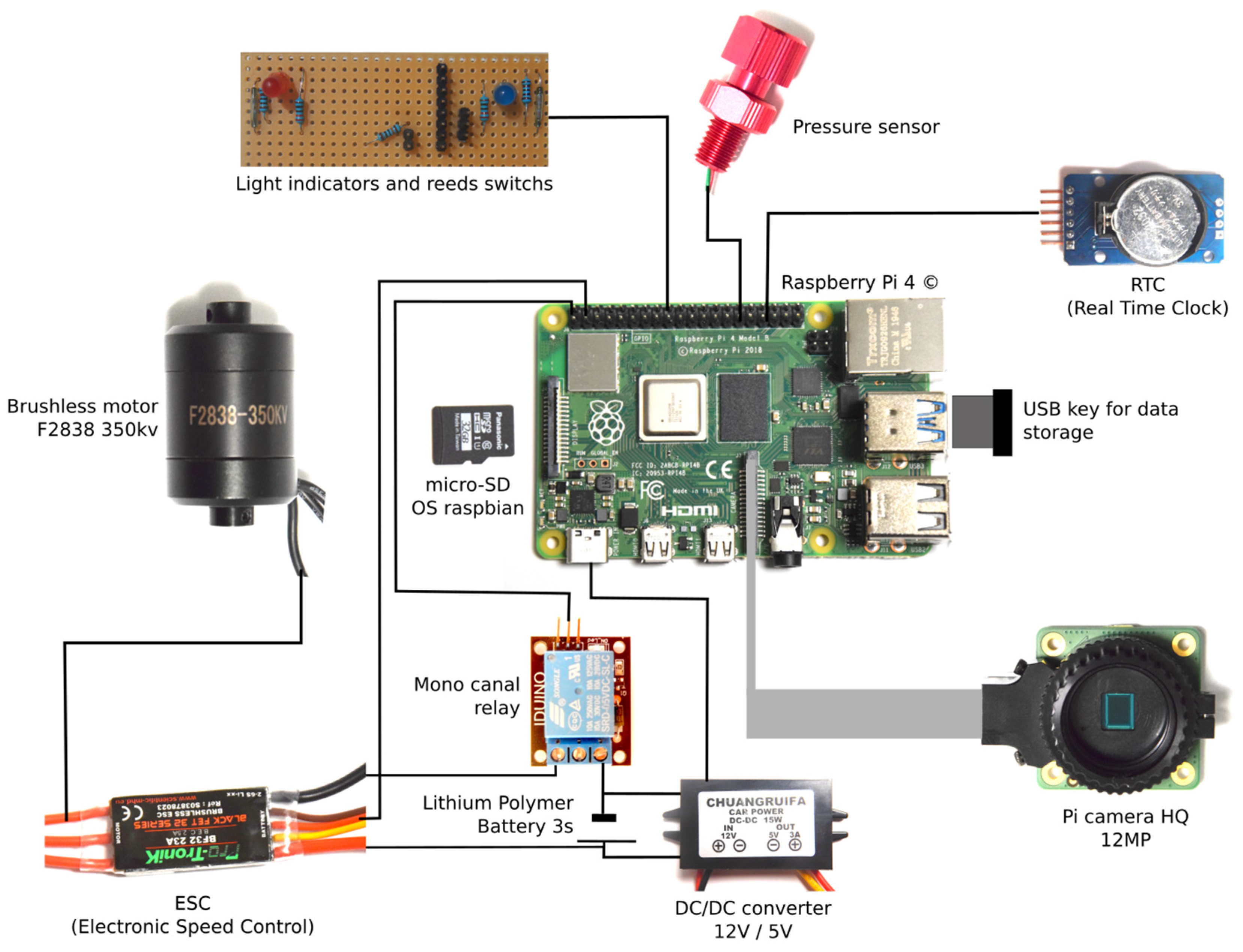
2.2.3. Power, Electronics, Sensors, and Software
3. Methods
3.1. Infrastructures and Tools Used for Prototype Conception and Reproduction
3.2. An Approach Based on Collective Intelligence
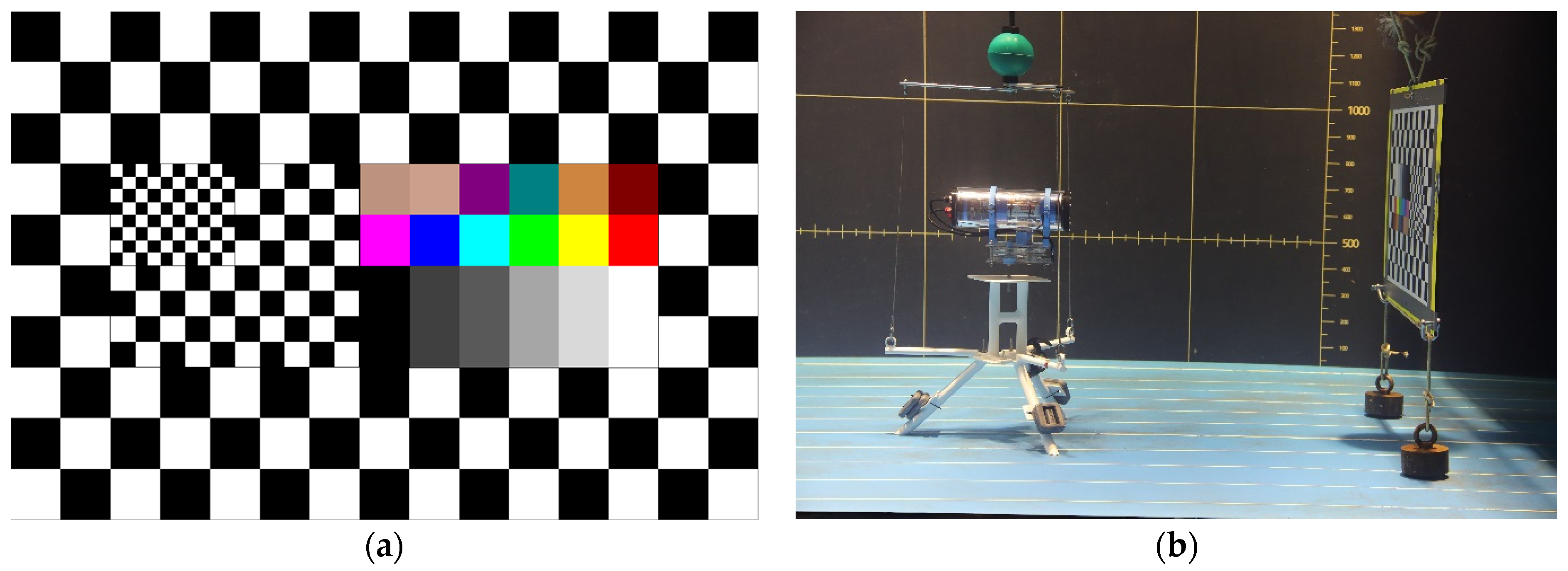
3.3. Experimental Set-Up for the Tests in a Controlled Pool
3.3.1. Field of View Estimation
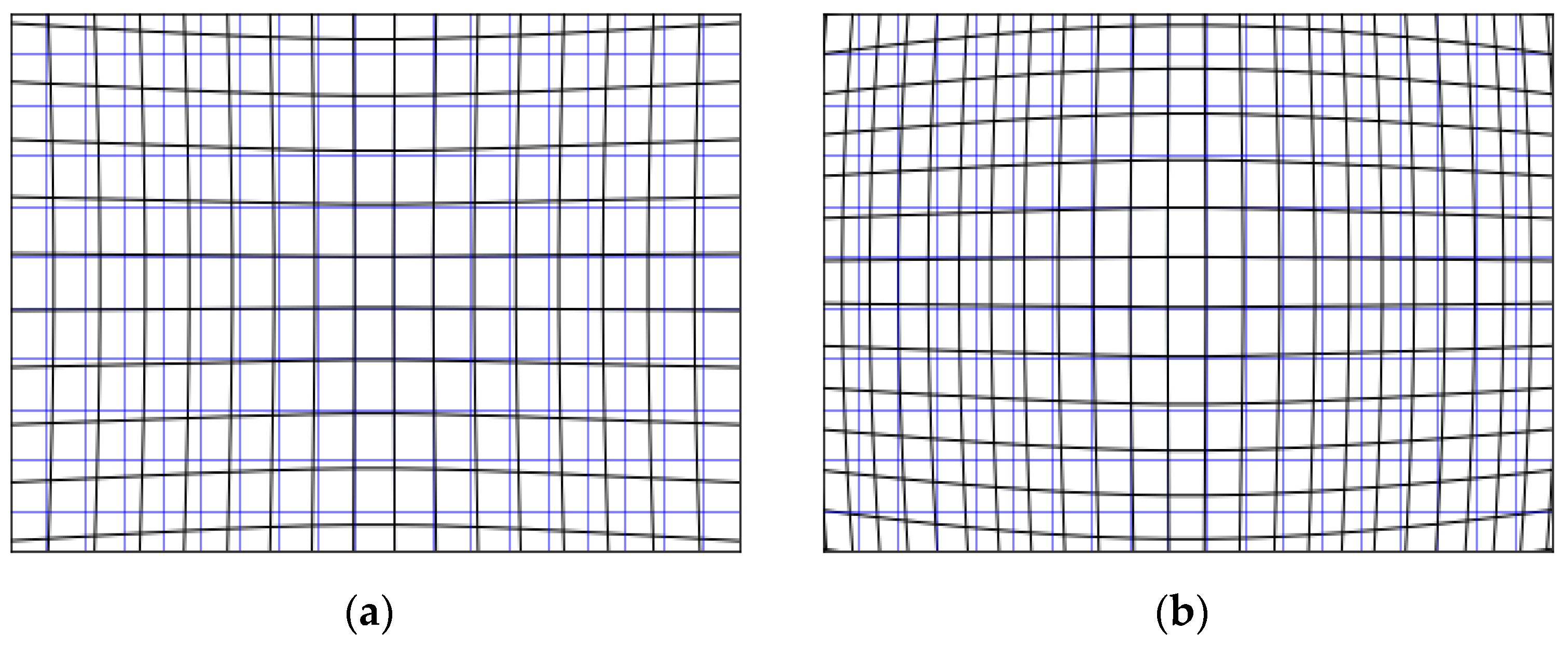
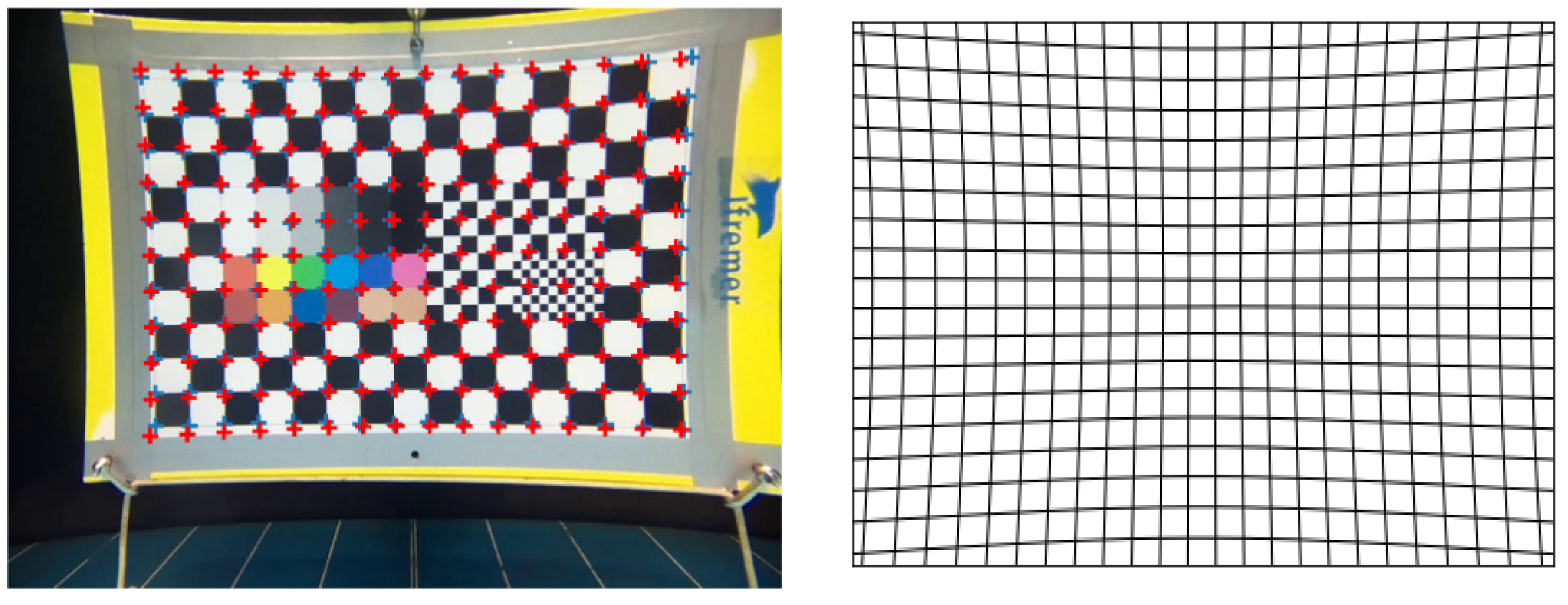
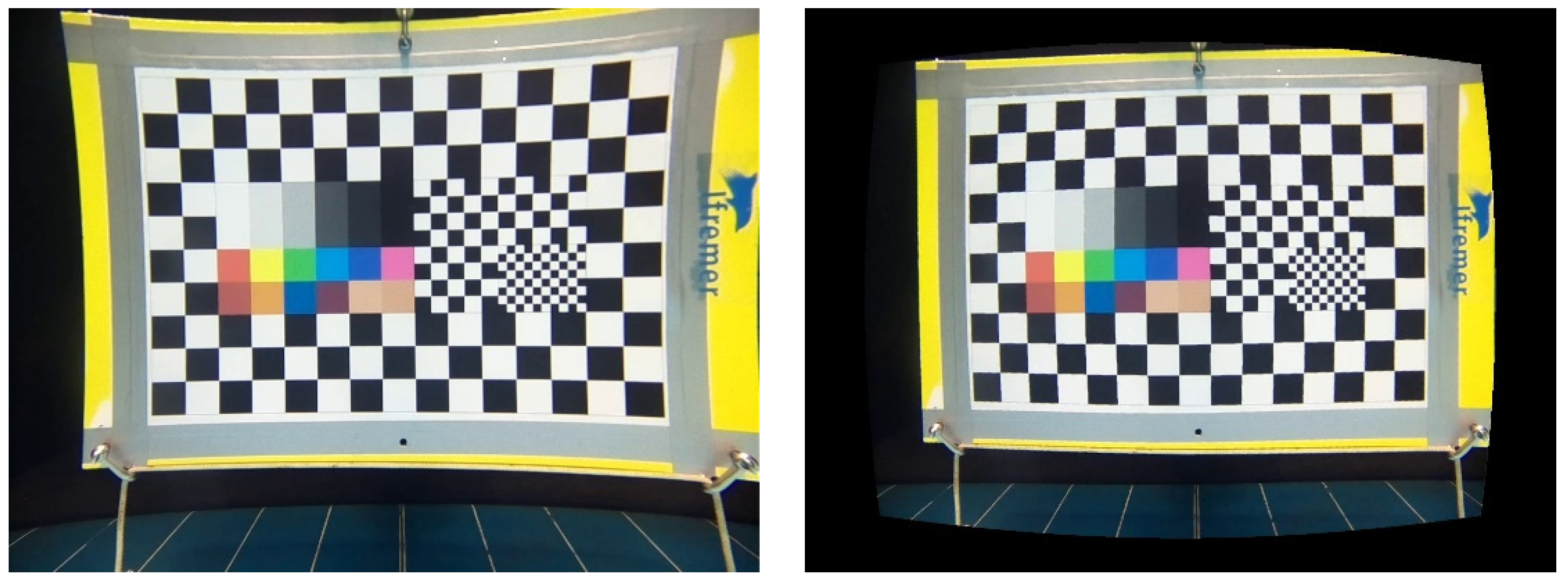
3.3.2. Image Distortion and Correction
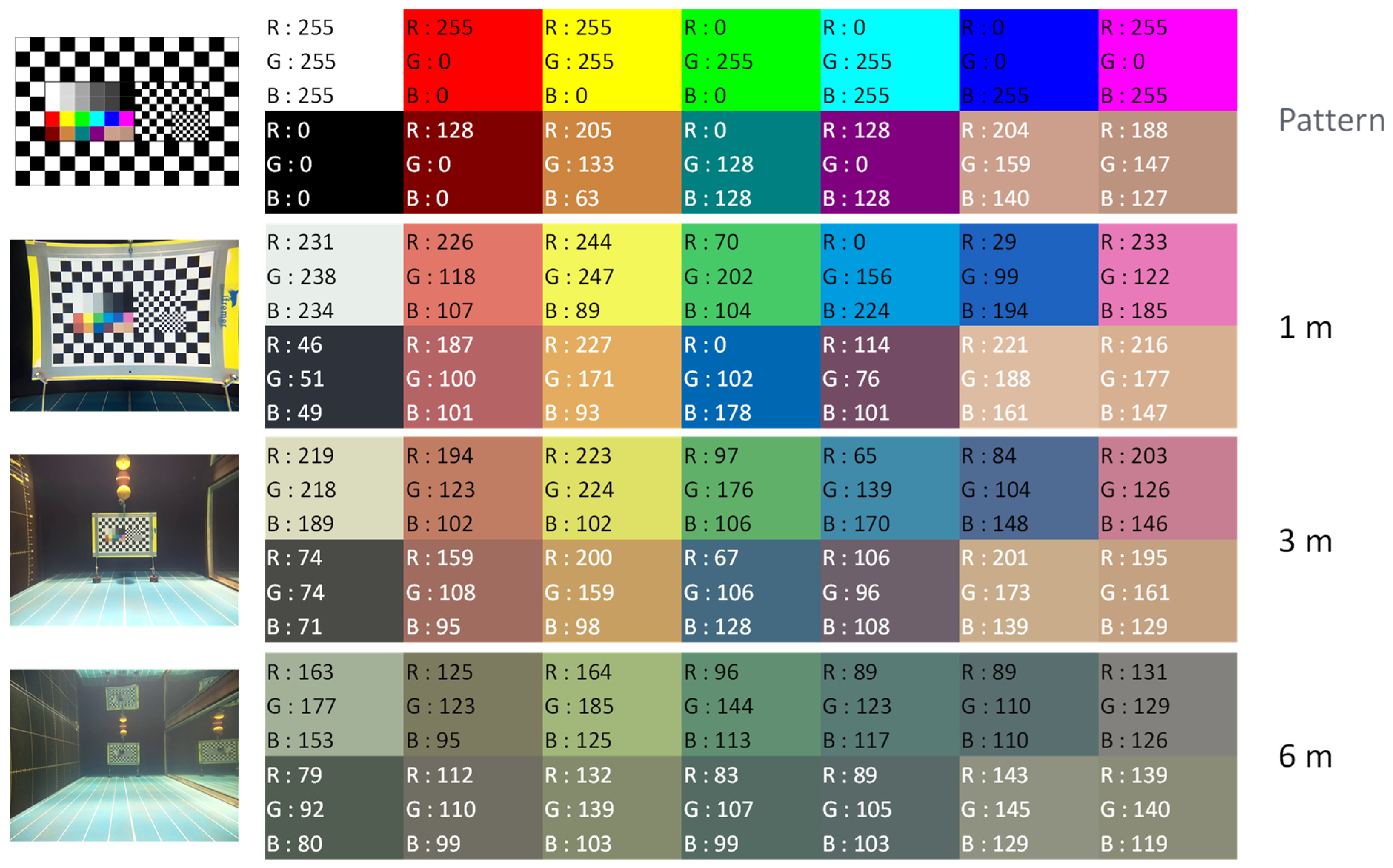
3.3.3. Color Rendering
4. Results
4.1. Optics
4.2. Housing and Integration of Components
4.3. Rotations of the Housing
4.4. Support and Rigging for Deployment
4.5. Electronics
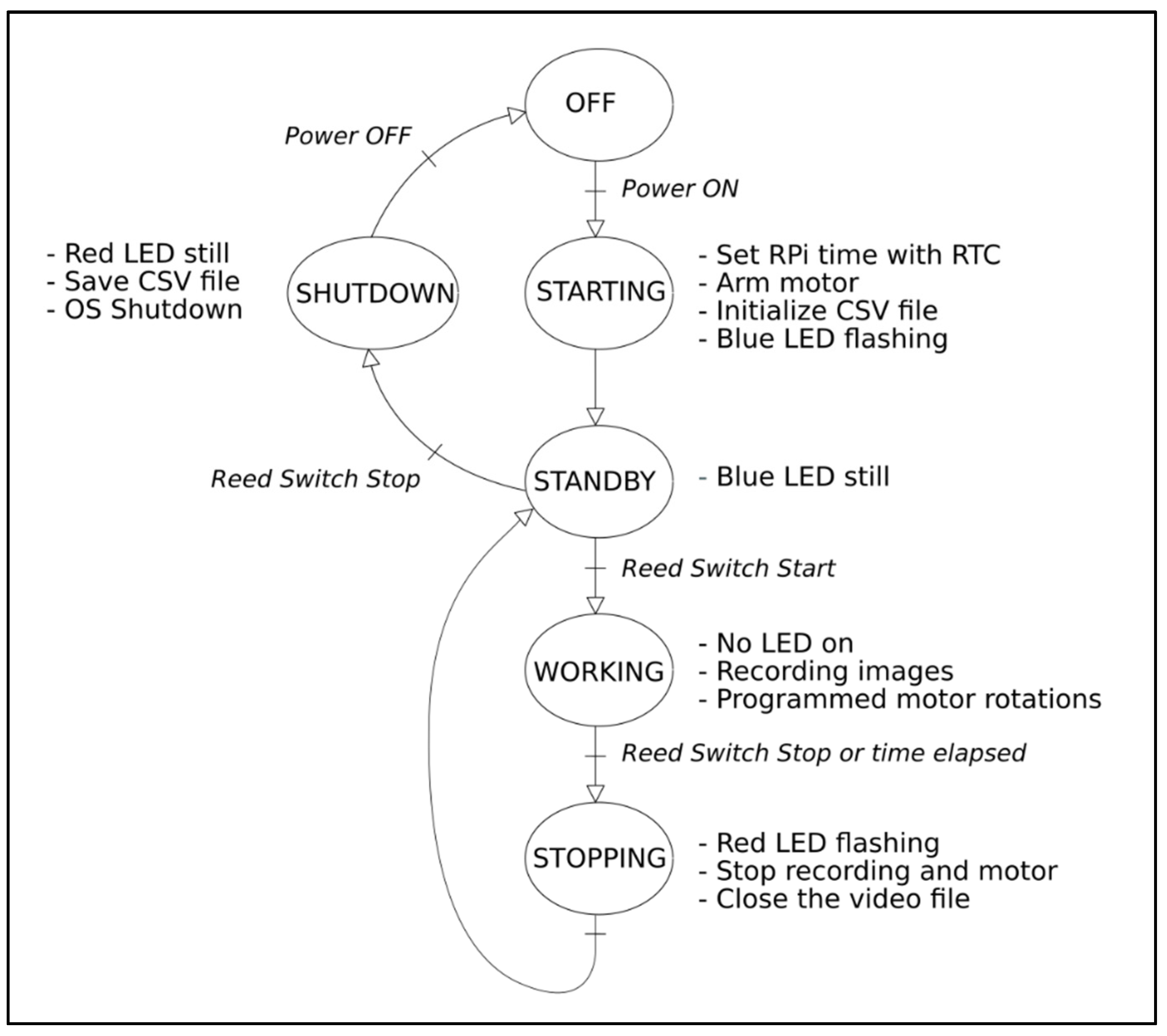
4.6. KOSMOS Recording Process
4.7. Experimental Results
4.7.1. Field of View
4.7.2. Image Distortion and Correction
4.7.3. Color Rendering
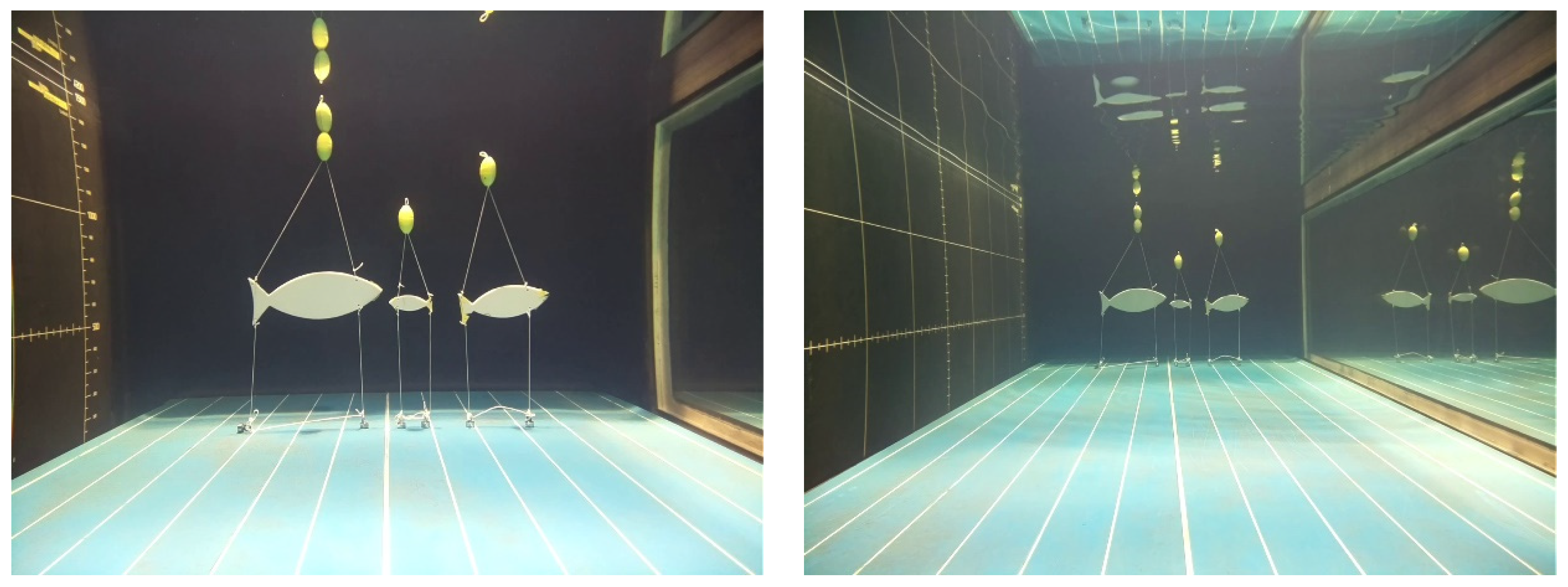
4.8. Test with Fishes
5. Discussion
5.1. Meeting the Initial Specifications
5.2. Reproducibility and Cost
5.3. Open Source and Digital Fabrication Laboratory
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mallet, D.; Pelletier, D. Underwater video techniques for observing coastal marine biodiversity: A review of sixty years of publications (1952–2012). Fish. Res. 2014, 154, 44–62. [Google Scholar] [CrossRef]
- Langlois, T.; Goetze, J.; Bond, T.; Monk, J.; Abesamis, R.A.; Asher, J.; Barrett, N.; Bernard, A.T.F.; Bouchet, P.J.; Birt, M.J.; et al. A field and video annotation guide for baited remote underwater stereo-video surveys of demersal fish assemblages. Methods Ecol. Evol. 2020, 11, 1401–1409. [Google Scholar] [CrossRef]
- Goetze, J.S.; Bond, T.; McLean, D.L.; Saunders, B.J.; Langlois, T.J.; Lindfield, S.; Fullwood, L.A.F.; Driessen, D.; Shedrawi, G.; Harvey, E.S. A field and video analysis guide for diver operated stereo-video. Methods Ecol. Evol. 2019, 10, 1083–1090. [Google Scholar] [CrossRef] [Green Version]
- Pelletier, D.; Leleu, K.; Mallet, D.; Mou-Tham, G.; Hervé, G.; Boureau, M.; Guilpart, N. Remote High-Definition Rotating Video Enables Fast Spatial Survey of Marine Underwater Macrofauna and Habitats. PLoS ONE 2012, 7, e30536. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pelletier, D.; Selmaoui-Folcher, N.; Bockel, T.; Schohn, T. A regionally scalable habitat typology for assessing benthic habitats and fish communities: Application to New Caledonia reefs and lagoons. Ecol. Evol. 2020, 10, 7021–7049. [Google Scholar] [CrossRef] [PubMed]
- Pelletier, D.; Roos, D.; Bouchoucha, M.; Schohn, T.; Roman, W.; Gonson, C.; Bockel, T.; Carpentier, L.; Preuss, B.; Powell, A.; et al. A Standardized Workflow Based on the STAVIRO Unbaited Underwater Video System for Monitoring Fish and Habitat Essential Biodiversity Variables in Coastal Areas. Front. Mar. Sci. 2021, 8, 1002. [Google Scholar] [CrossRef]
- Reis-Filho, J.A.; Giarrizzo, T.; Barros, F. Stationary underwater cameras assess more efficiently clear-water mangrove fish assemblages: A comparison of non-extractive techniques. Mar. Ecol. 2020, 41, e12597. [Google Scholar] [CrossRef]
- Favaro, B.; Lichota, C.; Cote, I.M.; Duff, S.D. TrapCam: An inexpensive camera system for studying deep-water animals. Methods Ecol. Evol. 2012, 3, 39–46. [Google Scholar] [CrossRef]
- Hermann, A.; Chladek, J.; Stepputtis, D. iFO (infrared Fish Observation)—An open source low-cost infrared underwater video system. HardwareX 2020, 8, e00149. [Google Scholar] [CrossRef]
- van Rossum, G. Python Tutorial, Technical Report CS-R9526; Centrum voor Wiskunde en Informatica (CWI): Amsterdam, The Netherlands, 1995; Available online: https://ir.cwi.nl/pub/5008 (accessed on 14 October 2021).
- Treibitz, T.; Schechner, Y.; Kunz, C.; Singh, H. Flat Refractive Geometry. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 51–65. [Google Scholar] [CrossRef] [Green Version]
- VideoLan. VLC Media Player. 2006. Available online: https://www.videolan.org/vlc/index.html (accessed on 14 October 2021).
- Donaldson, J.A.; Drews, P.; Bradley, M.; Morgan, D.L.; Baker, R.; Ebner, B.C. Countering low visibility in video survey of an estuarine fish assemblage. Pac. Conserv. Biol. 2019, 26, 190–200. [Google Scholar] [CrossRef]
- He, K.; Sun, J.; Tang, X. Single Image Haze Removal Using Dark Channel Prior. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 2341–2353. [Google Scholar] [CrossRef]
- Berman, D.; Levy, D.; Avidan, S.; Treibitz, T. Underwater Single Image Color Restoration Using Haze-Lines and a New Quantitative Dataset. 2019. Available online: https://arxiv.org/abs/1811.01343v3 (accessed on 14 October 2021).
- Mallet, D.; Vigliola, L.; Wantiez, L.; Pelletier, D. Diurnal temporal patterns of the diversity and the abundance of reef fishes in a branching coral patch in New Caledonia. Austral Ecol. 2016, 41, 733–744. [Google Scholar] [CrossRef]
- Pelletier, D.; Carpentier, L.; Roman, W.; Bockel, T. Unbaited Rotating Video for Observing Coastal Habitats and Macrofauna. Methodological Guide for STAVIRO and MICADO Systems; AMBIO/A/1; Ifremer: Nouméa, New Caledonia, 2016; p. 90. [Google Scholar] [CrossRef]
- Pagniello, C.M.L.S.; Butler, J.; Rosen, A.; Sherwood, A.; Roberts, P.L.D.; Parnell, P.E.; Jaffe, J.S.; Sirovic, A. An Optical Imaging System for Capturing Images in Low-Light Aquatic Habitats Using Only Ambient Light. Oceanography 2021, 34, 71–77. [Google Scholar] [CrossRef]
- Suburban Marine. Opaleye, A Smart Maritime Node; Suburban Marine Inc.: Meriden, CT, USA, 2021; Available online: https://github.com/suburbanmarine/opaleye (accessed on 14 October 2021).
- Mouy, X.; Black, M.; Cox, K.; Qualley, J.; Mireault, C.; Dosso, S.; Juanes, F. FishCam: A low-cost open source autonomous camera for aquatic research. HardwareX 2020, 8, e00110. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part | Reference | Manufacturer |
|---|---|---|
| Body tube | WTE4-P-TUBE-12-R1-RP | Blue Robotics Inc., Torrance, CA, USA |
| Aluminium end cap, five holes | WTE4-M-END-CAP-5-HOLE-R1-RP | Blue Robotics Inc., Torrance, CA, USA |
| Acrylic end cap | WTE4-P-END-CAP-R1-RP | Blue Robotics Inc., Torrance, CA, USA |
| Camera | Raspberry Pi camera HQ 12 MP | The Raspberry Foundation, Cambridge, UK |
| Objective | ACH0420MM | AICO Electronics Limited, Hangzhou, China |
| Micro-computer | Raspberry Pi 4 | The Raspberry Foundation |
| DC/DC converter | Car power DC/DC 15 w 12 v to 5 v | Chuangruifa, Shenzhen, China |
| Brushless motor | F2838-350 KV | Blue Robotics Inc., Torrance, CA, USA |
| Pressure and temperature sensor | Bar30 | Blue Robotics Inc., Torrance, CA, USA |
| Electronic speed control | BF32 23A | Protronik, Saint-Martin-d’Hères, France |
| Relay | SRD-05VDC-SL-C | Shenzhen Jiayuancheng Electronics, Guangdong, China |
| Lithium Polymer battery | Brainergy BY.2200.3S.45-XT60, 2200 mAh | Yuki models, Bad Bramstedt, Germany |
| Micro SD card | 32Go writing speed 10 minimum | Integral Memory, London, UK |
| USB key | 64 Go | SanDisk, Milpitas, CA, USA |
| Two cobalt connectors | 3 pins (12A) | Blue Trail Engineering, Longmont, CO, USA |
| RTC module | DS3231 AT24C32 | iTeadStudio, Shenzhen, China |
| KOSMOS 3.0 | STAVIRO | FishOASIS | Opaleye | FishCam | |
|---|---|---|---|---|---|
| Reference | This paper | [4,6] | [18] | [19] | [20] |
| Sensor type | 12 Mp Raspberry PiCam HQ | SONY cameras (PJ740, CX900) | SONY α7s II camera | Logitech BRIO Webcam | 8 MP Raspberry Pi Cam v2 |
| Image resolution | 1600 × 1200 pi | 1920 × 1080 pi | 4240 × 2380 pi | 4k30 | 1600 × 1200 pi |
| Field of View | 60° × 6 frames | 60° × 6 frames | 180° | 65°, 78° or 90° | 110° |
| Storage | USB 3.0 64 Go flash drive | 128 Go Class 10 SD card | USB 3.0 256 Go flash drive | 64 Go microSD card | 200 Go microSD card |
| Runtime | ~8 h | ~8 h (camera), 3 days (motor) | 224 h (16 h/day for 14 days) | External power source (wired) | 212 h over 14 days |
| Total weight | ~7 kg | ~8 kg | Not specified | Not specified | Not specified |
| Size | 300 mm length 101 mm diameter | Motor housing: 217 × 141 × 121 mm3 Camera housing: 300 mm length and 99 mm diameter | Not specified | 165 mm length 127 mm diameter (enclosure) | 300 mm length 101 mm diameter |
| Cost | €1360 | €3250 | €4260 | €1350 | €430 |
| Documentation for reproduction | https://wikifactory.com/@konkarlab/kosmos30 (accessed on 14 October 2021) | Available from the lead author | https://github.com/cpagniel/FishOASIS/ (accessed on 14 October 2021) | https://github.com/suburbanmarine/opaleye (accessed on 14 October 2021) | https://github.com/xaviermouy/FishCam (accessed on 14 October 2021) |
| Licence type | CC-BY-SA 4.0 | No licence | Not specified | Software: BSD-3-Clause license Hardware: CC-BY-SA 4.0 | CC-BY-SA 4.0 |
| Existing applications | Experiment in paper | >5000 valid videos (see Pelletier et al. 2021) | Experiment in paper | Not available | Experiment in paper |
| Typical use | Autonomous lander | Autonomous lander | Diver-placed fixed setup | To be integrated on a powered platform | Autonomous lander |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pelletier, D.; Rouxel, J.; Fauvarque, O.; Hanon, D.; Gestalin, J.-P.; Lebot, M.; Dreano, P.; Furet, E.; Tardivel, M.; Le Bras, Y.; et al. KOSMOS: An Open Source Underwater Video Lander for Monitoring Coastal Fishes and Habitats. Sensors 2021, 21, 7724. https://doi.org/10.3390/s21227724
Pelletier D, Rouxel J, Fauvarque O, Hanon D, Gestalin J-P, Lebot M, Dreano P, Furet E, Tardivel M, Le Bras Y, et al. KOSMOS: An Open Source Underwater Video Lander for Monitoring Coastal Fishes and Habitats. Sensors. 2021; 21(22):7724. https://doi.org/10.3390/s21227724
Chicago/Turabian StylePelletier, Dominique, Justin Rouxel, Olivier Fauvarque, David Hanon, Jean-Paul Gestalin, Morgann Lebot, Paul Dreano, Enora Furet, Morgan Tardivel, Yvan Le Bras, and et al. 2021. "KOSMOS: An Open Source Underwater Video Lander for Monitoring Coastal Fishes and Habitats" Sensors 21, no. 22: 7724. https://doi.org/10.3390/s21227724
APA StylePelletier, D., Rouxel, J., Fauvarque, O., Hanon, D., Gestalin, J. -P., Lebot, M., Dreano, P., Furet, E., Tardivel, M., Le Bras, Y., Royaux, C., & Leguen, G. (2021). KOSMOS: An Open Source Underwater Video Lander for Monitoring Coastal Fishes and Habitats. Sensors, 21(22), 7724. https://doi.org/10.3390/s21227724