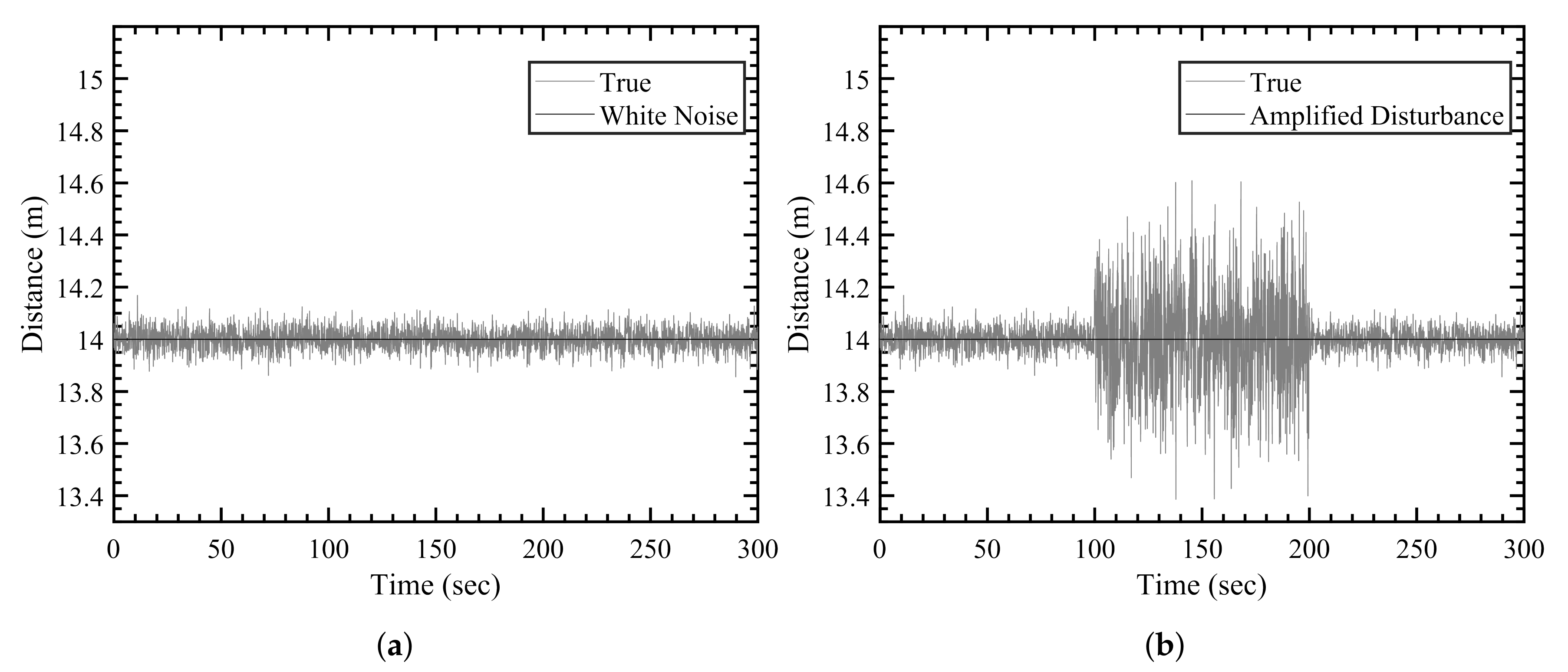
An accurate and reliable positioning system (PS) is currently a significant topic of research due to its broad range of applications, such as robotics, supermarkets, and accessibility aids for the visually impaired. The positioning of objects depends on localization techniques for active navigation. It can be defined as the concept of locating objects using devices like cameras, ultrasonic sensors, or ultra-wide band (UWB) ranging sensors. This study considers UWB sensors for the development of a robust PS. Generally, localization performance is affected by measurement noise caused by environmental factors. This can be improved with estimation techniques, and the Kalman filter (KF) is the most common one. In the presence of obstacles, however, the measurement noise may increase beyond the nominal environmental noise characteristics. The traditional approaches are typically unable to estimate the system states accurately in such situations. In the presence of such interference, the accuracy of localization and its robustness are the primary benchmarks of concern for the performance improvement of a PS.
A number of studies have been conducted to improve the performance of estimation techniques for localization and navigation in noisy environments. Choliz et al. [
1] compared the various localization methods, including least squares (LS) with distance contraction, weighted LS with multi-dimensional scaling, extended KF (EKF), and particle filter (PF). Banerjee [
2] presented a scheme to improve the precision of UWB sensor measurements by applying a PF to a noise model that attempts to identify the noise for a local PS. Assa and Plataniotis [
3] proposed an adaptive KF to approximate the measurement and process noise covariance distributions through finite sampling under the assumption that it is not known a priori. Nguyen and Guillemin [
4] presented a similar approach using multiple KFs, and an LS is applied to estimate the process noise covariance. Akhlaghi et al. [
5] applied the adaptive filtering approach to estimate measurement and process noise covariance matrices using the covariance matching technique. These studies concerning noise reduction lack the consideration of random interference and the adaptive nature of the measurement noise covariance matrix to account for the aforementioned random interference. Fu et al. [
6] proposed the application of three different estimation techniques based on the federated KF structure. In this method, the measurement-based adaptive KF algorithm and the improved Suge–Husa algorithm were proposed within the federated structure. Although this method provides improved performance, the modeling of three different algorithms for the purposes of localization in the field of robotics is undesirable due to the high computational burden. Furthermore, this approach mainly focuses on the application to ships in the absence of the satellite navigation system. Eroglu et al. [
7] proposed the updating of the measurement noise covariance matrix based on a scaling factor. However, this approach mainly focused on the application to visible light communication-based localization, where the number of anchors is constantly changing, and the method adapts the measurement noise based on these changes. A fuzzy-based updating method was proposed by Woo for the measurement noise covariance matrix based on a number of inputs including the innovation vector of EKF, the position dilution of precision, and the number of receivable satellites [
8]. In fuzzy-based systems containing many inputs; however, there are several rules and membership functions that need to be optimized to obtain a generalized fuzzy system that offers consistent performance. Most of the above methods focus on the estimation of the process and measurement noise covariance matrices leading to a standard formulation for most of the adaptive estimation techniques. Furthermore, to present substantial evidence as to why this standard formulation is unsuitable for the estimation of noise covariance matrices, Dunik et al. [
9] provided a summary of the various methods for parameter estimation and prediction error-based correlation. Geng et al. [
10] proposed the adaptive cubature KF (CKF) for attitude and heading estimation applied to indoor PSs based on the smart phone-embedded MARG sensors. The core concept of the proposed approach is to apply fading and limited memory-weighted methods to CKF. Although the proposed method provides improved performance over the existing methods, the application of adaptive weights to estimate the noise covariance matrices over the most recent measurements increases the computational burden of the approach. Huang et al. [
11] proposed the variational Bayesian method-based adaptive KF for cooperative localization in scenarios with inaccurate prior information, where the expectation–maximization algorithm is used to estimate the prediction error covariance matrix. An alternate iteration strategy was also defined to further reduce the computational complexity of the proposed method.
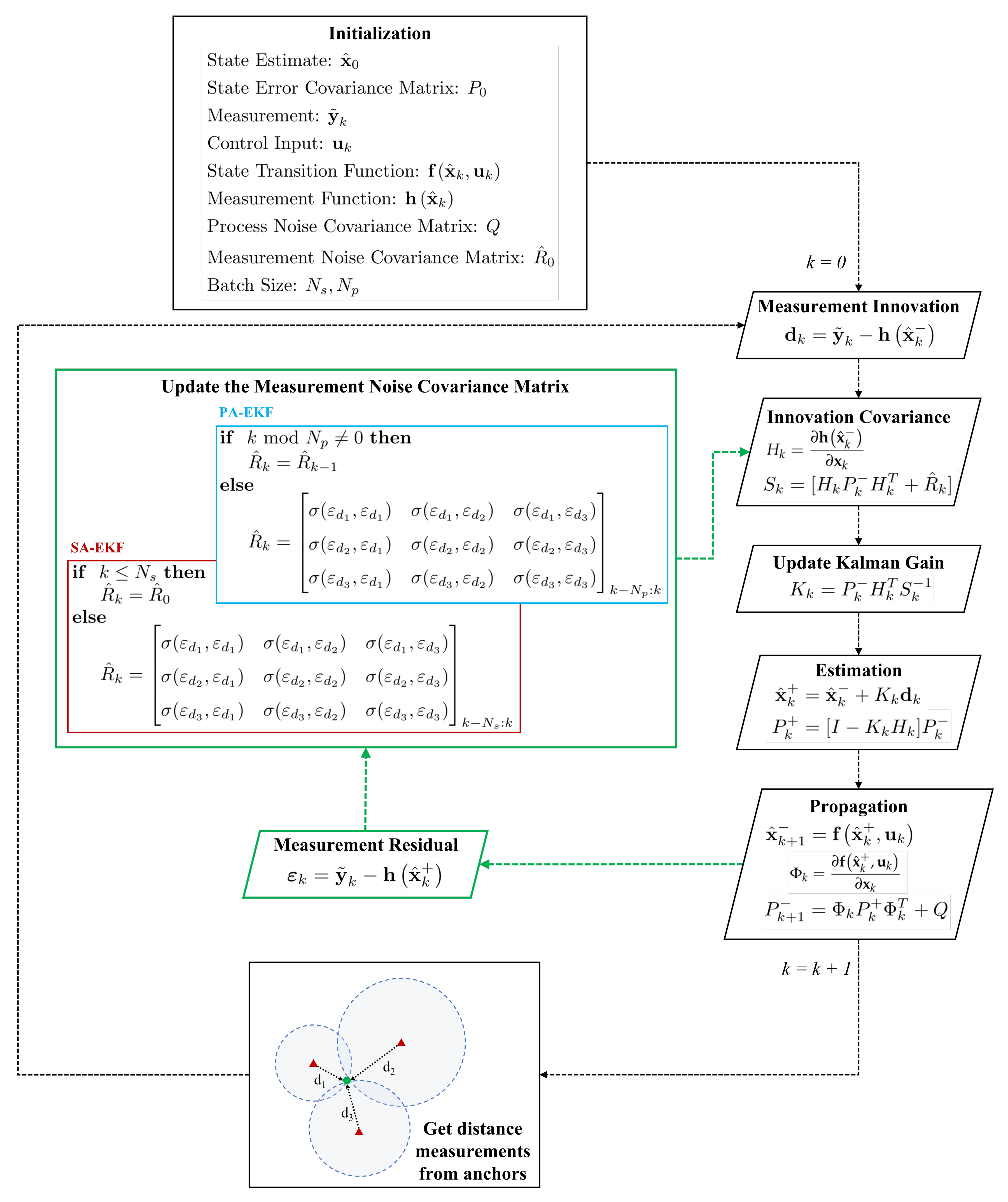
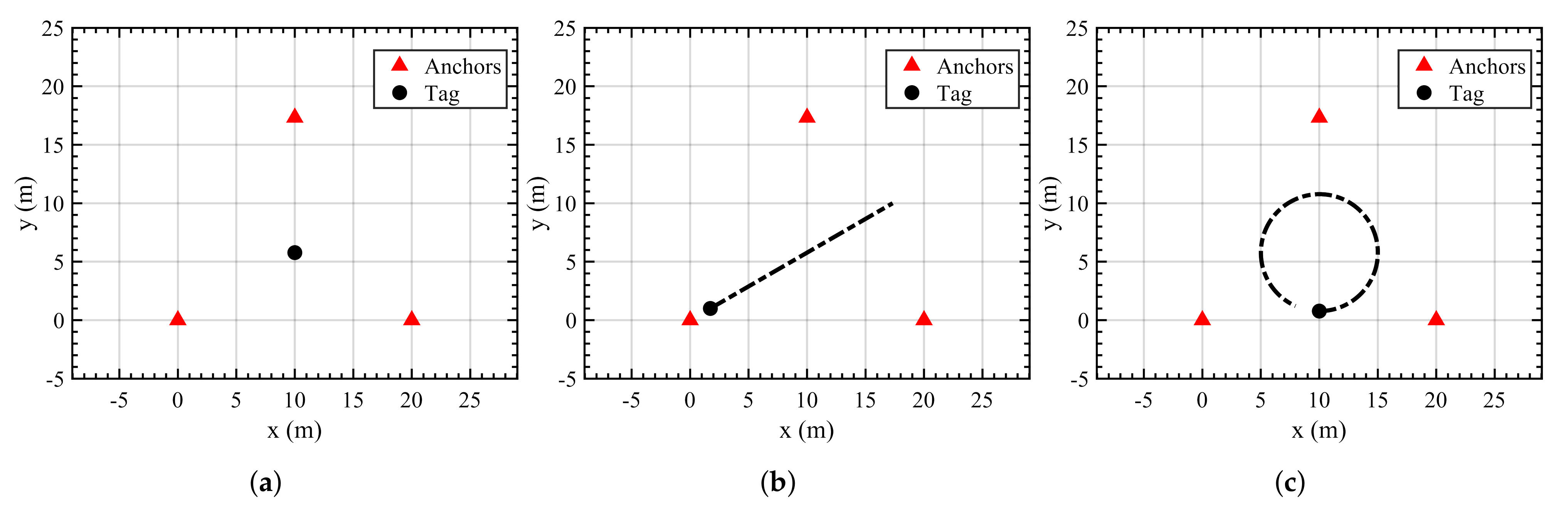
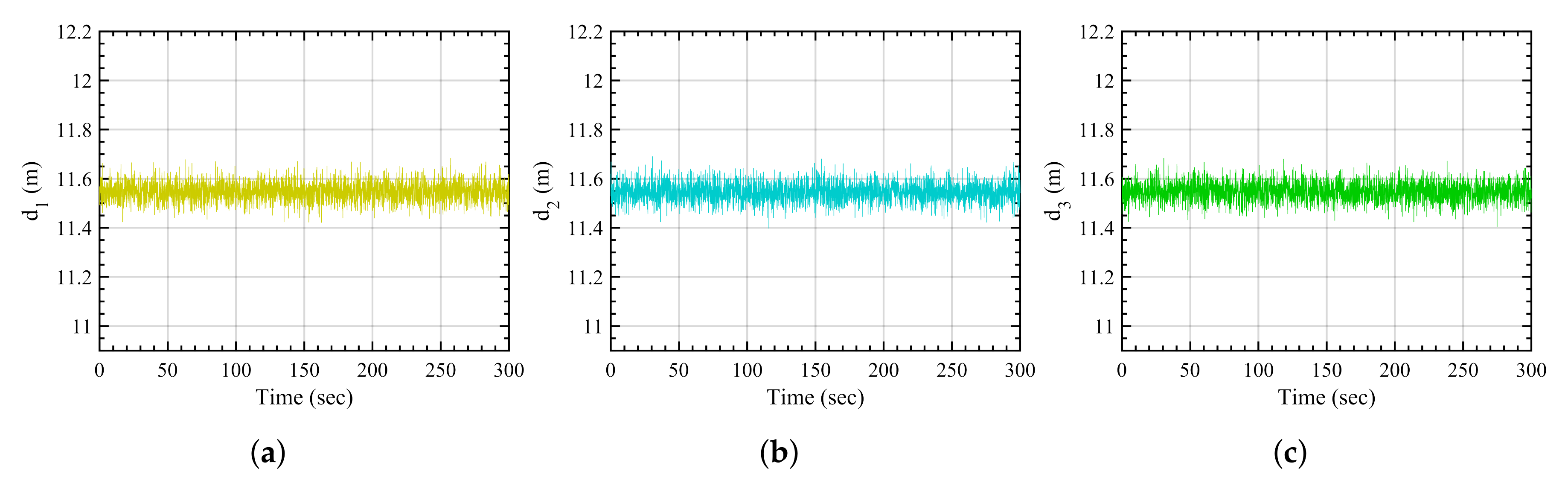
This study does not primarily focus on the estimation of the noise covariance matrices, instead it proposes an approach that can provide reliable estimates of the target object location in a sensor-disturbed environment by updating the noise covariance. Regardless of the inaccurate measurement due to the disturbances, uncertainty in the estimation of states is reduced by updating the measurement noise covariance based on previous measurements. Two methods are presented. The first one is the piecewise-adaptive EKF (PA-EKF) technique. In this method, EKF adapts to the noise by updating the measurement noise covariance matrix after a batch of measurements has been collected. The second approach, the sequentially-adaptive EKF (SA-EKF) technique, shifts the batch by adding a new measurement and removing the oldest one rather than waiting for a completely new batch of measurements. In this way, the methods can adapt to the constantly changing environments and offer a more robust estimation technique for all kinds of PSs. Another primary advantage of these methods is that they are easily applicable to both KF and EKF techniques. This allows such modification to be generalized for several different situations. To validate the performance of the proposed approaches, multiple simulation studies are conducted in different scenarios, such as static, linear, and nonlinear motions. Furthermore, some analysis has been researched on selecting the batch sizes for further improvement in performance.
The paper is organized as follows:
Section 2 provides a background on the preliminaries for this paper.
Section 3 introduces the proposed methodologies. Simulation studies for validating the proposed approaches are defined in
Section 4, and the corresponding results are discussed in
Section 5. Finally, the conclusions are drawn in
Section 6.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














