
Study on Mechanical Characteristics of Segmental Joints of a Large-Diameter Shield Tunnel under Ultrahigh Water Pressure

Abstract
:1. Introduction
2. Numerical Simulation of Mechanical Characteristics of Segmental Joints
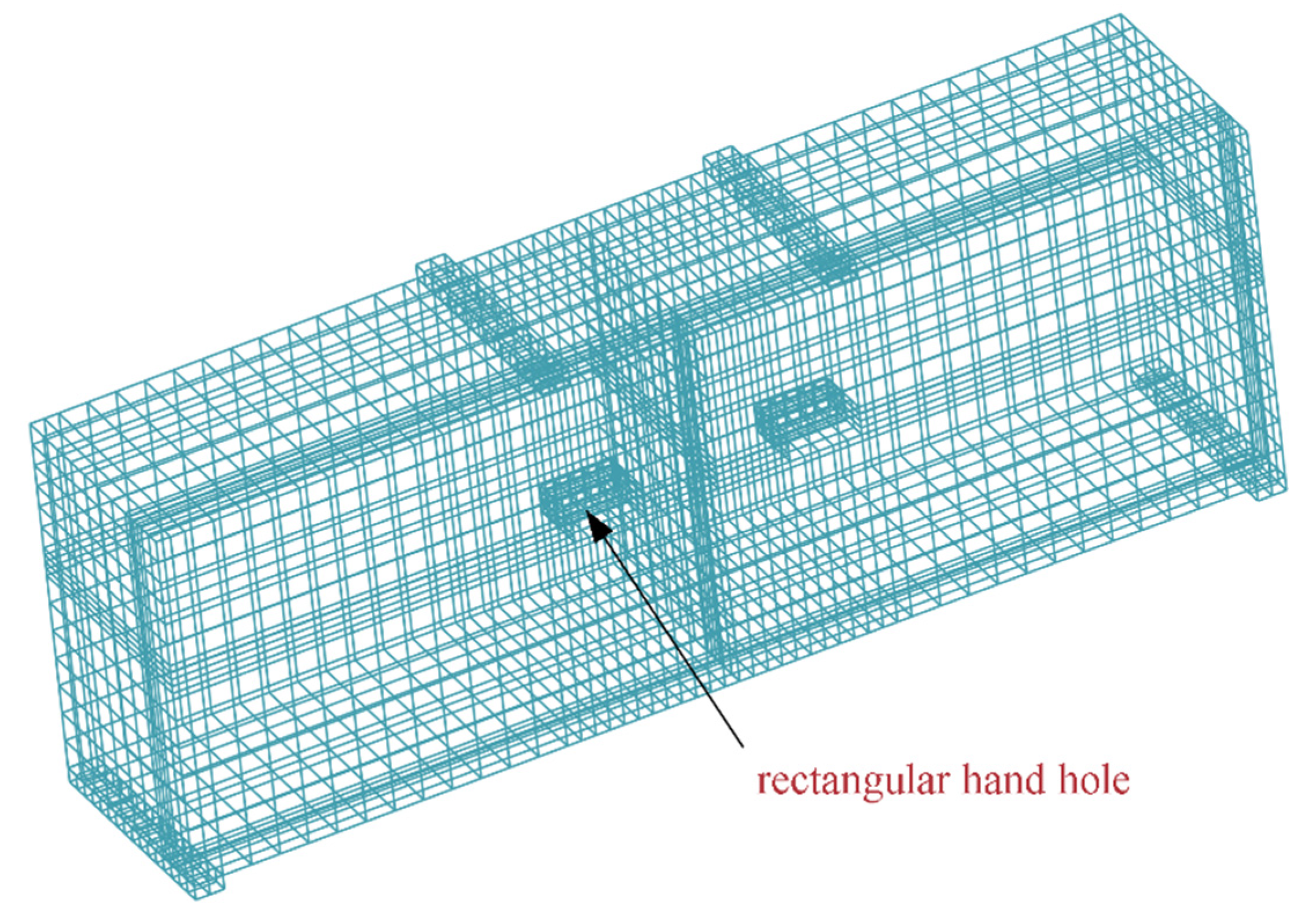
2.1. Modeling
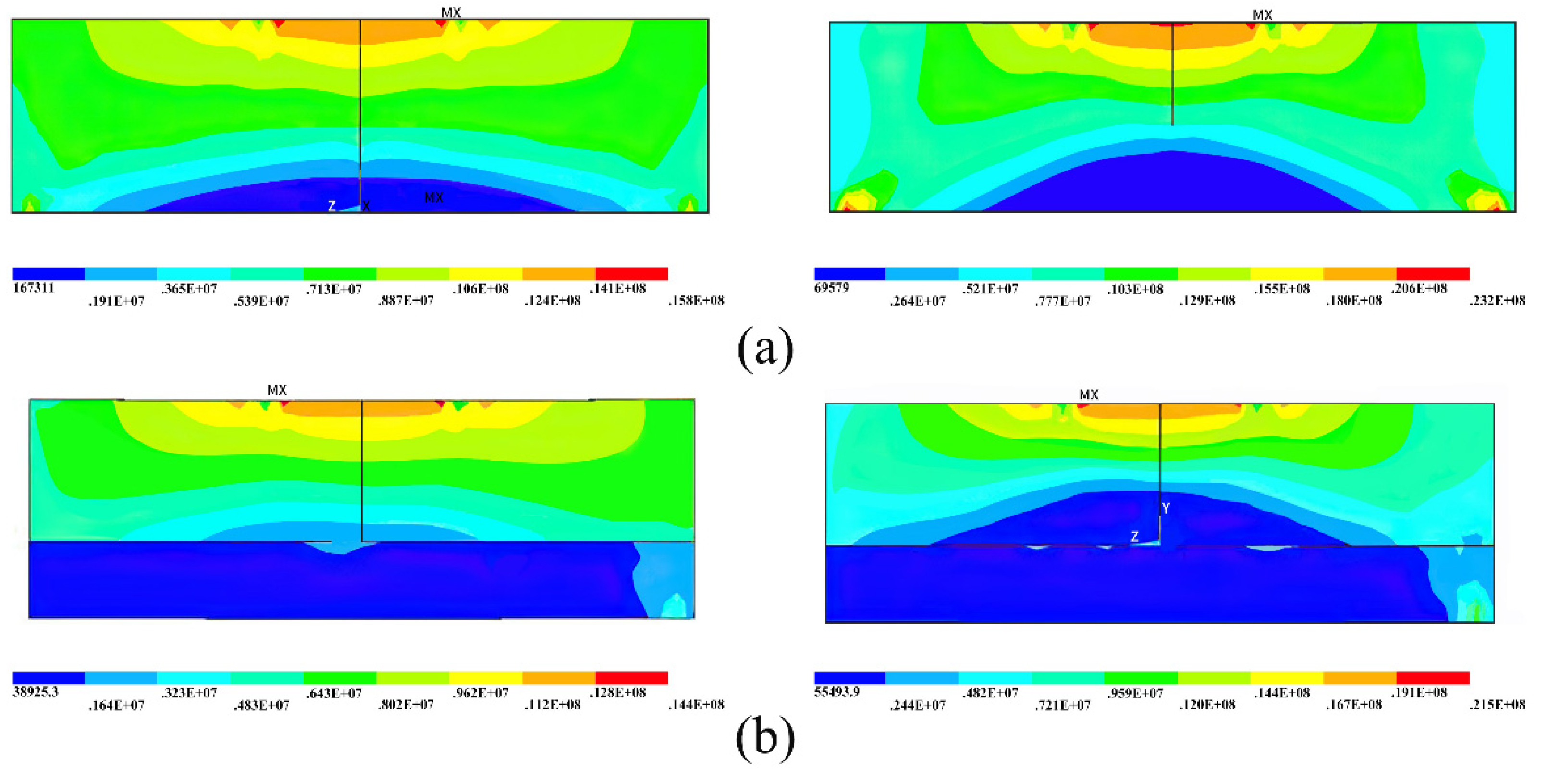
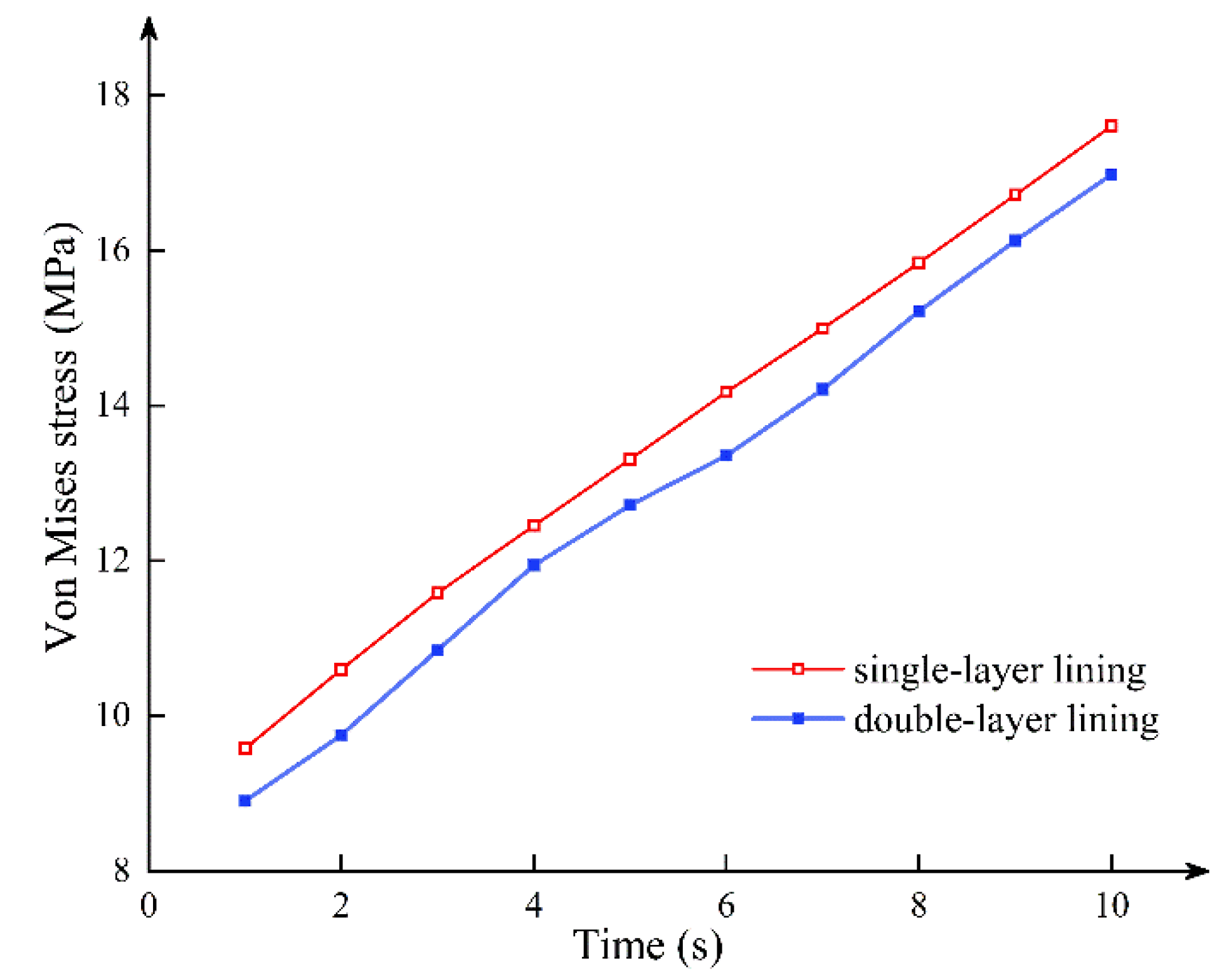
2.2. Comparison of the Destruction Process
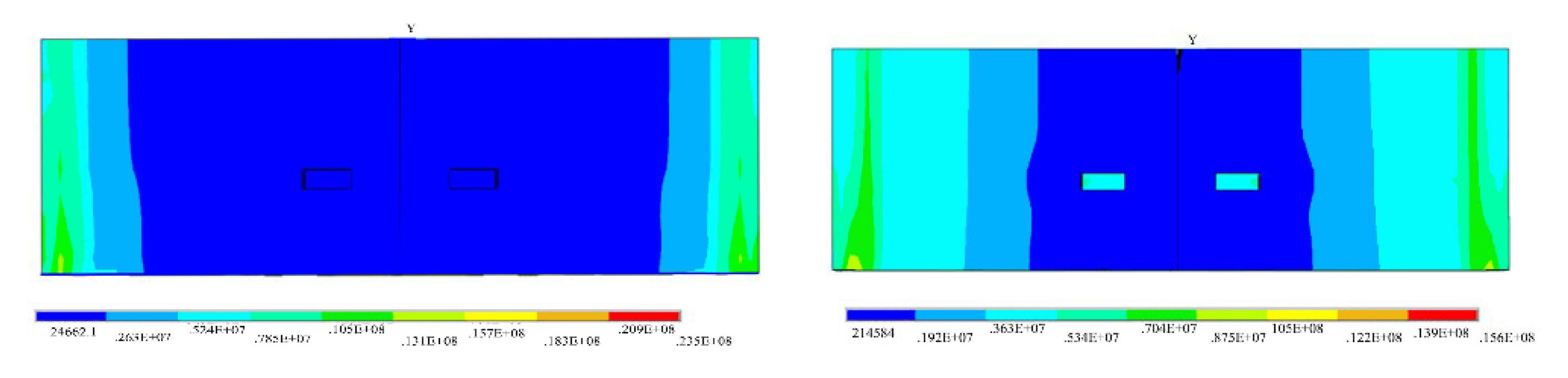
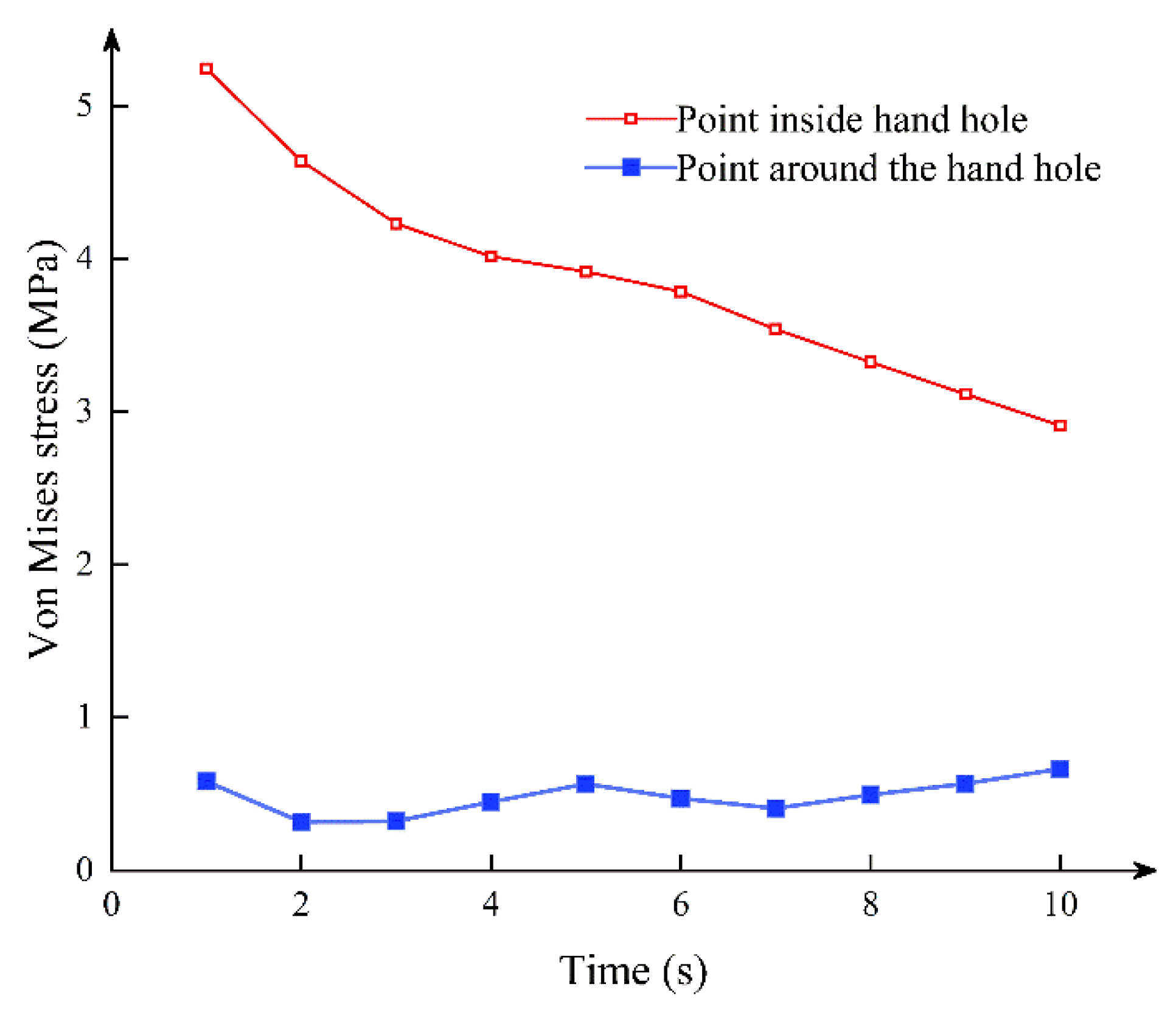
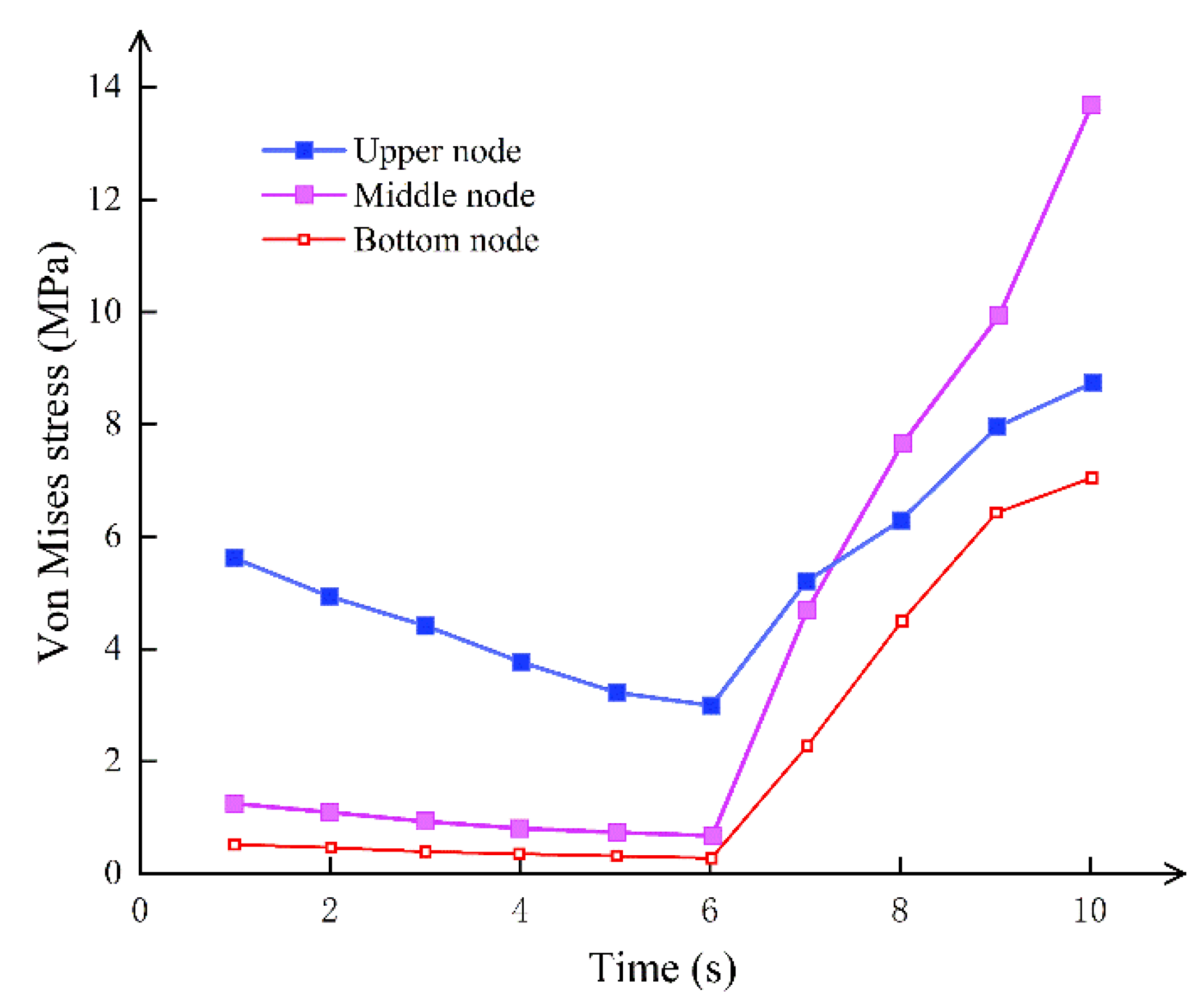
2.3. Stress Concentration at the Hand Hole of the Segmental Joint
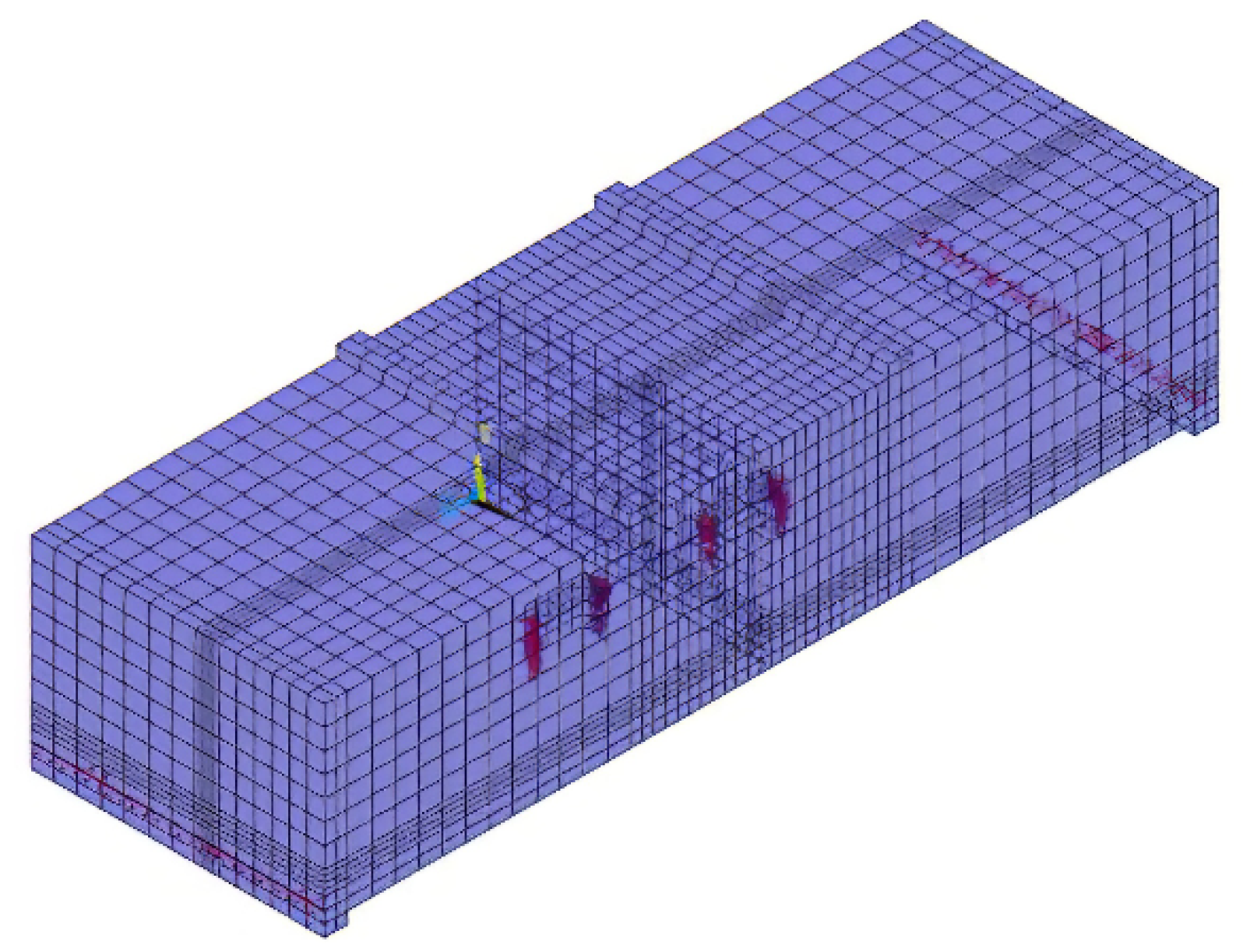
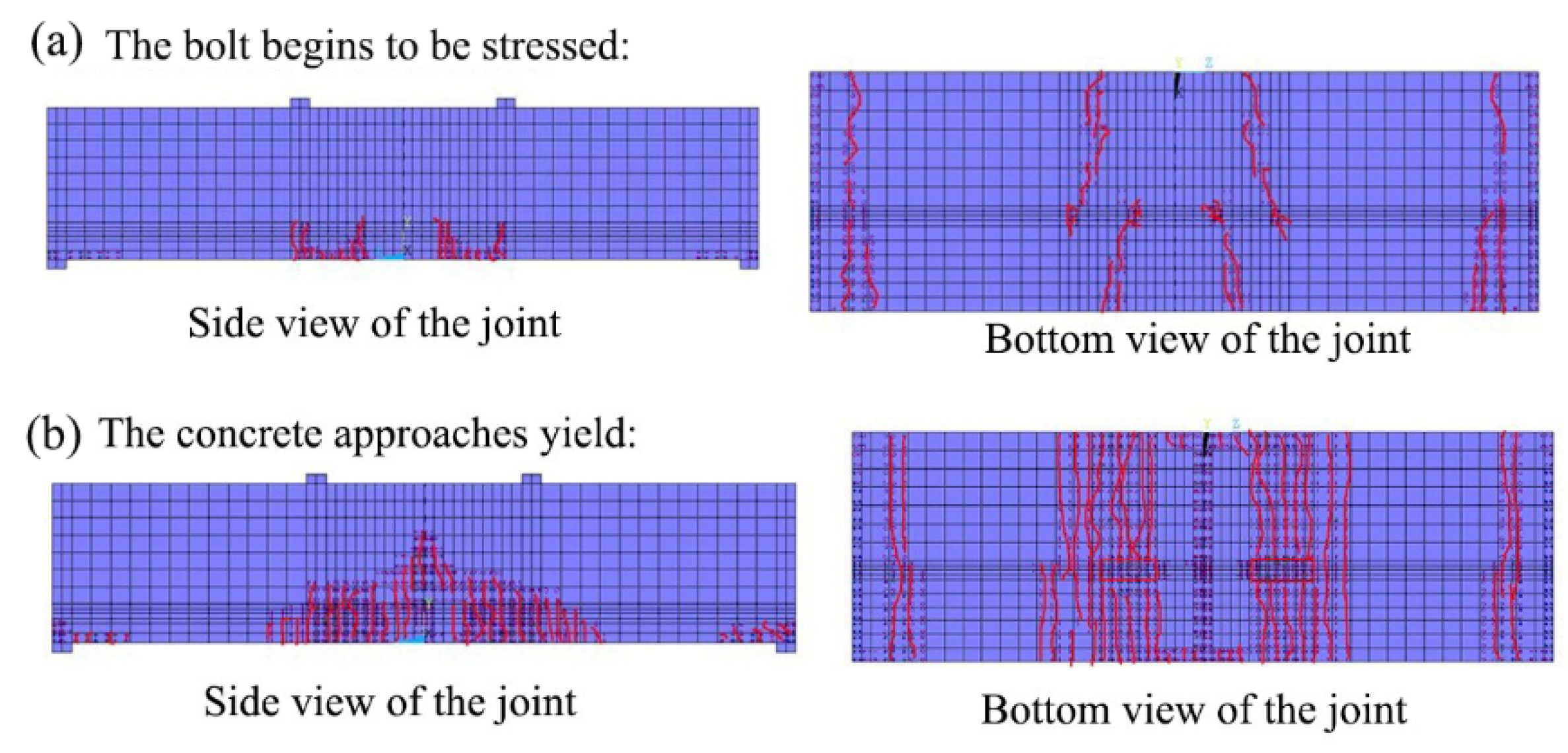
2.4. Crack Development of the Segmental Joint
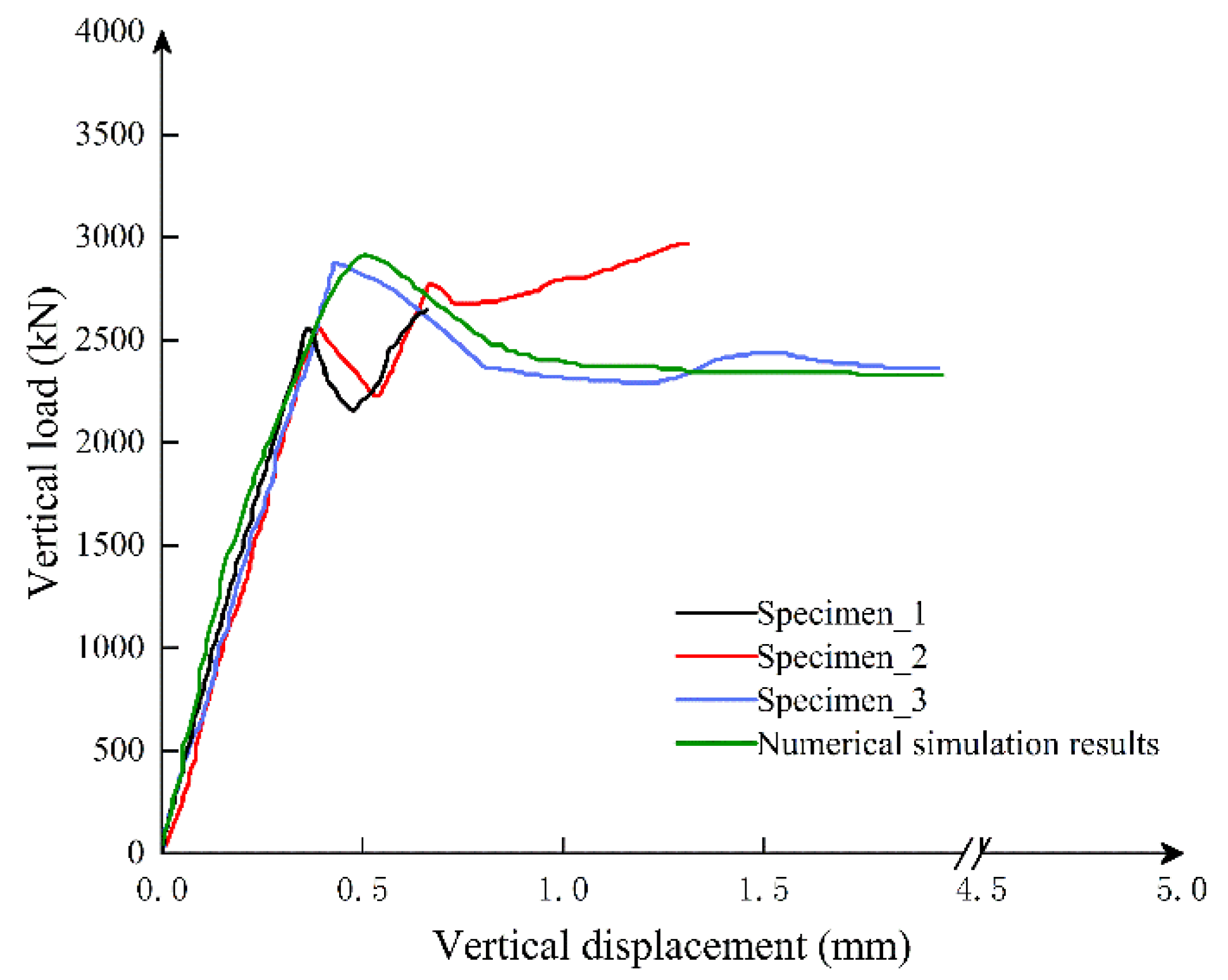
2.5. Experimental Verification
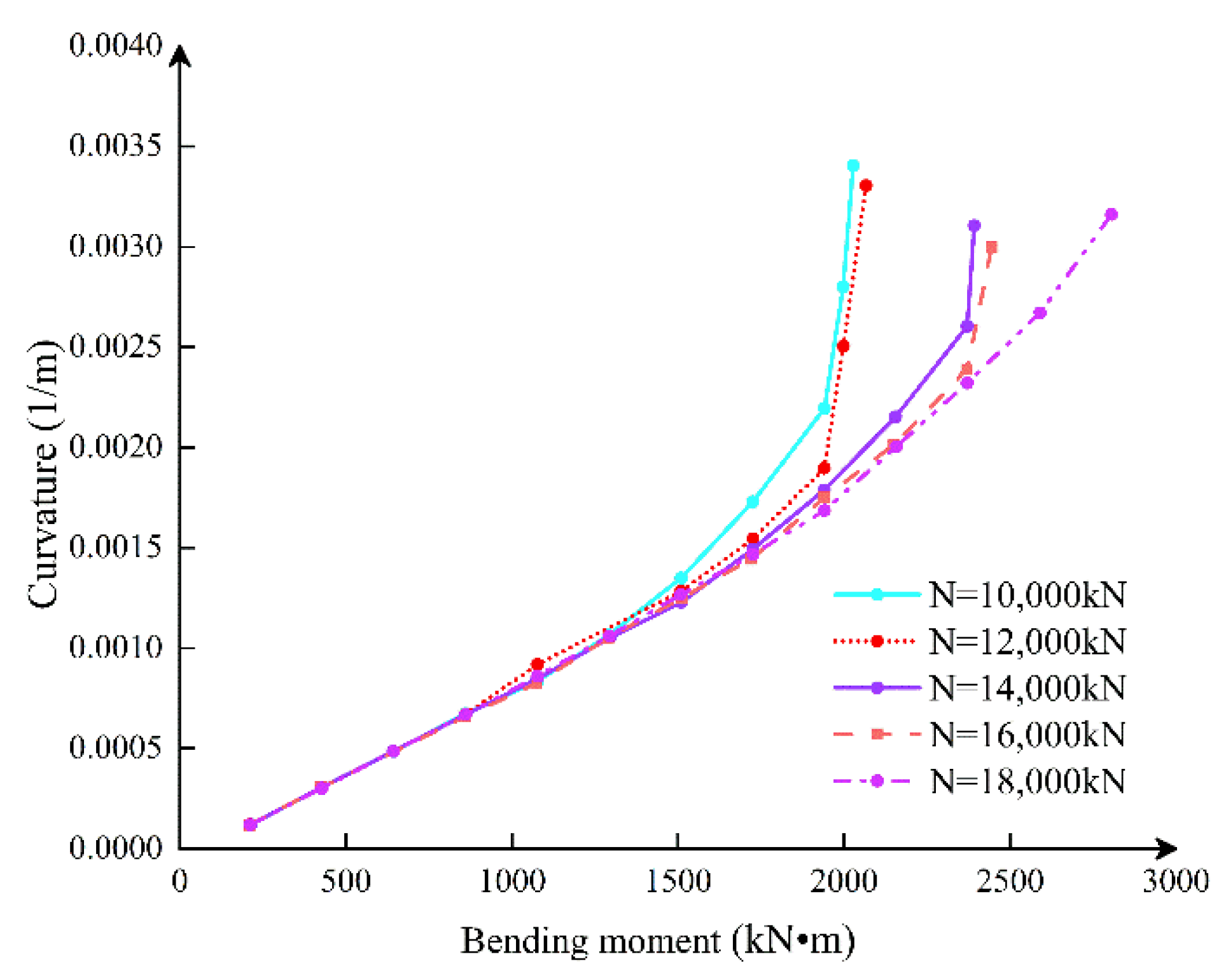
2.6. Joint Bending Stiffness under Different Axial Forces
3. Theoretical Analysis of Mechanical Characteristics of Single-Layer Lining Segmental Joints
3.1. Assumptions
- (1)
- The deformation of the segmental joint conforms to the plane section assumption without considering the influence of the hand strain and the bolt disengagement factors.
- (2)
- The nonlinear constitutive equation of concrete can be linearly simplified by the equivalent principle of deformation energy.
- (3)
- The influence of elastic liner, tenon-grooves interface, and locating block on joint mechanical behavior are ignored.
- (4)
- According to the numerical analysis of the three sections, the high water pressure shield tunnel adopts the single-layer lining.
- (5)
- The bolt is under tension without compression.
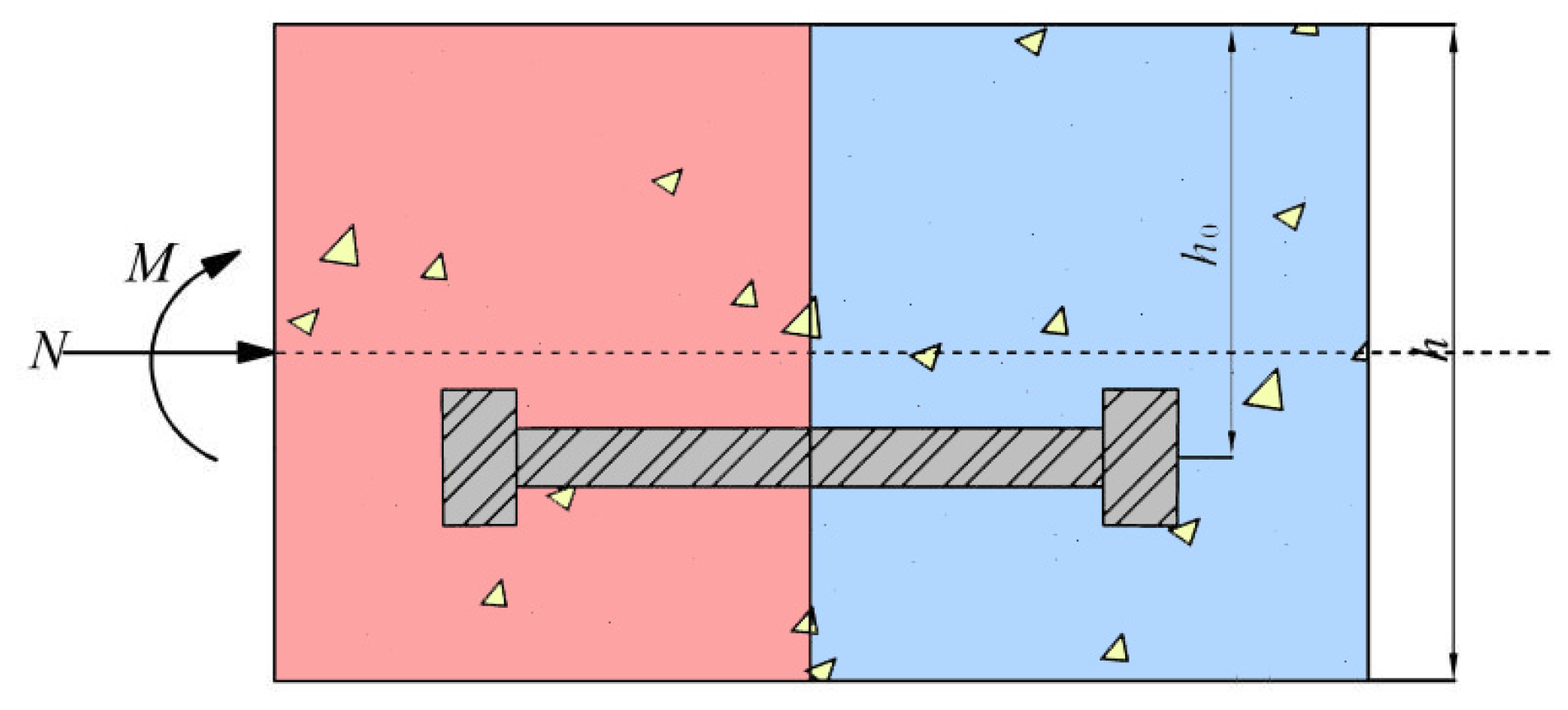
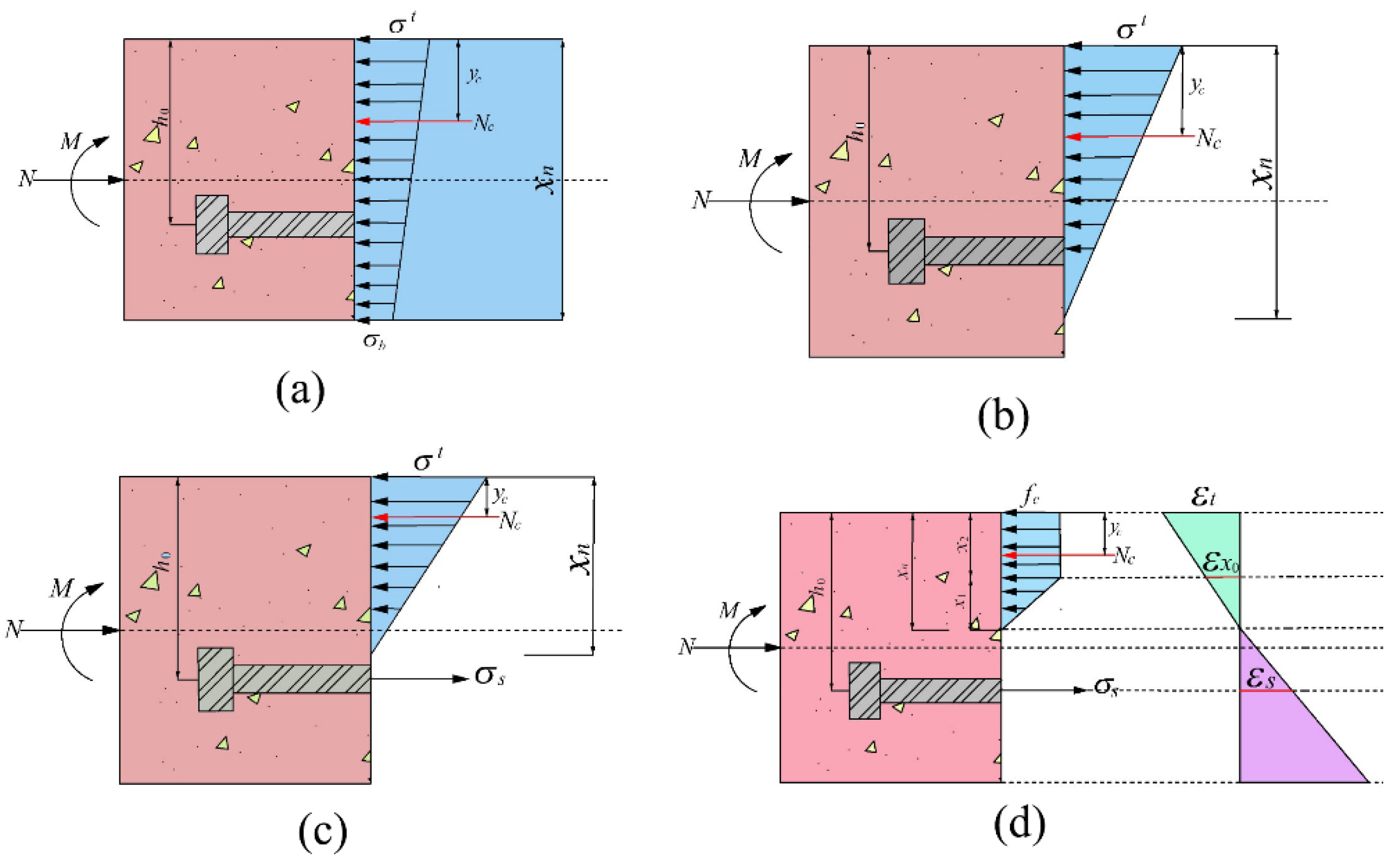
3.2. Theoretical Model
3.2.1. Bending Stiffness of the Segmental Joint under Positive Bending Moment
3.2.2. Bending Stiffness of the Segmental Joint under Negative Bending Moment
4. Discussion
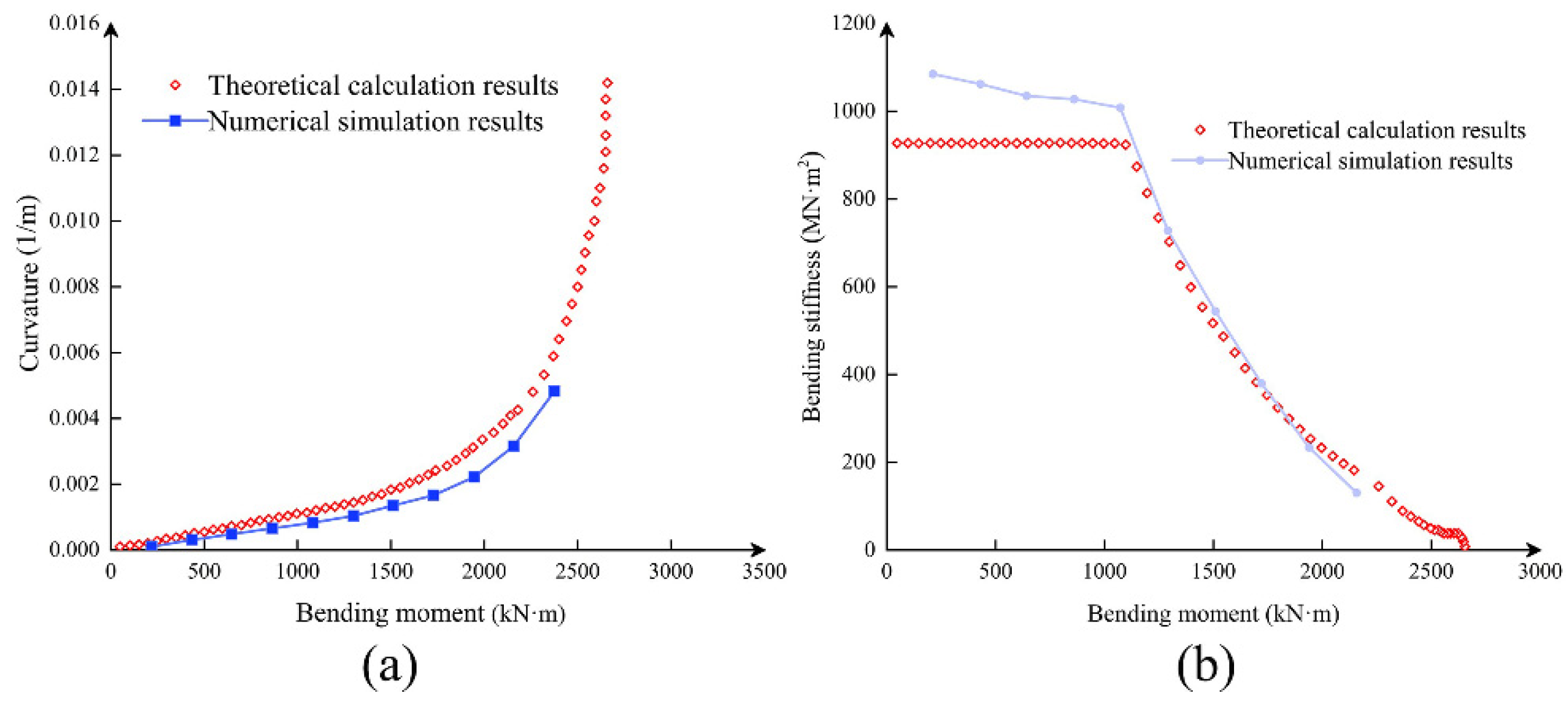
4.1. Verification
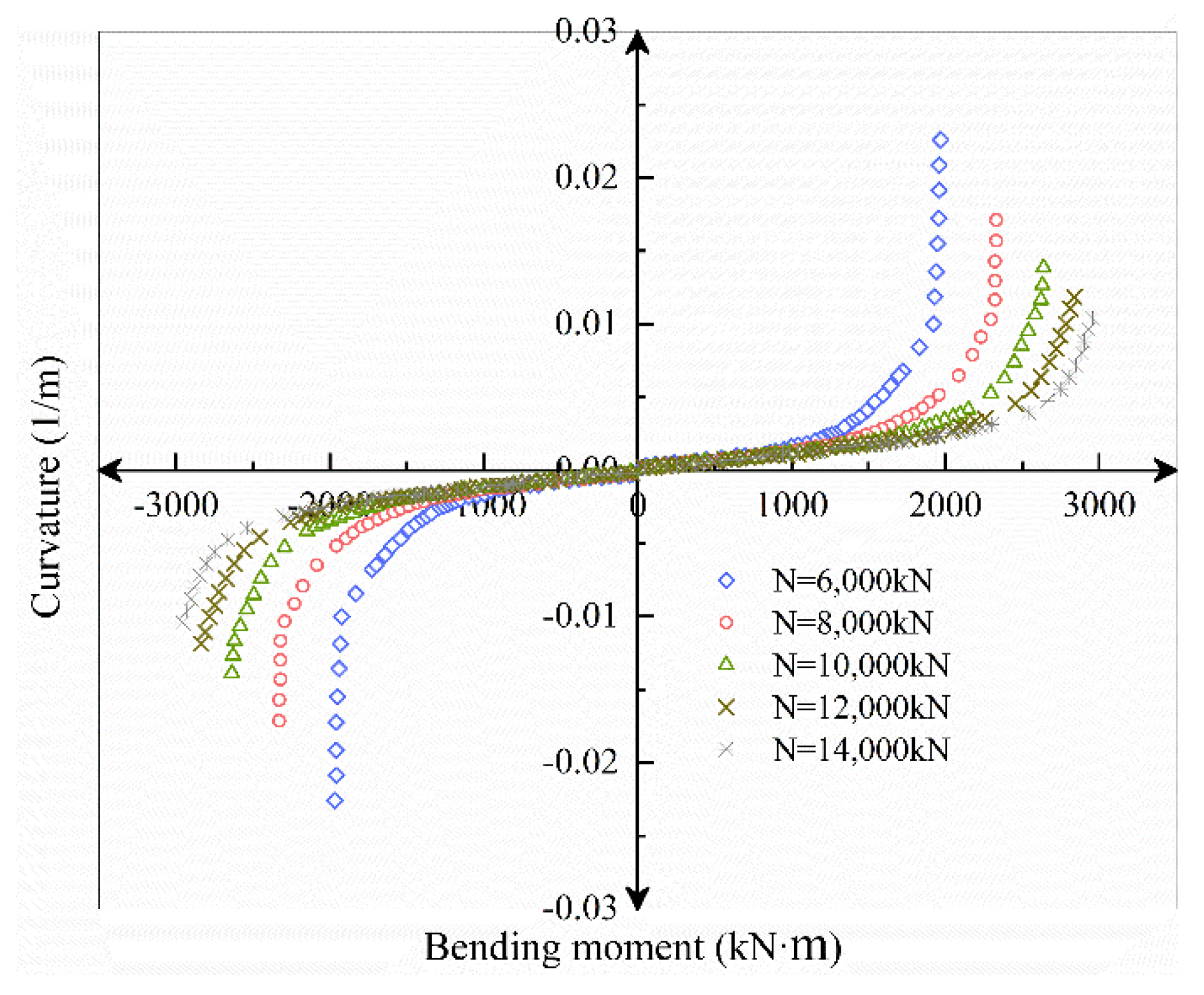
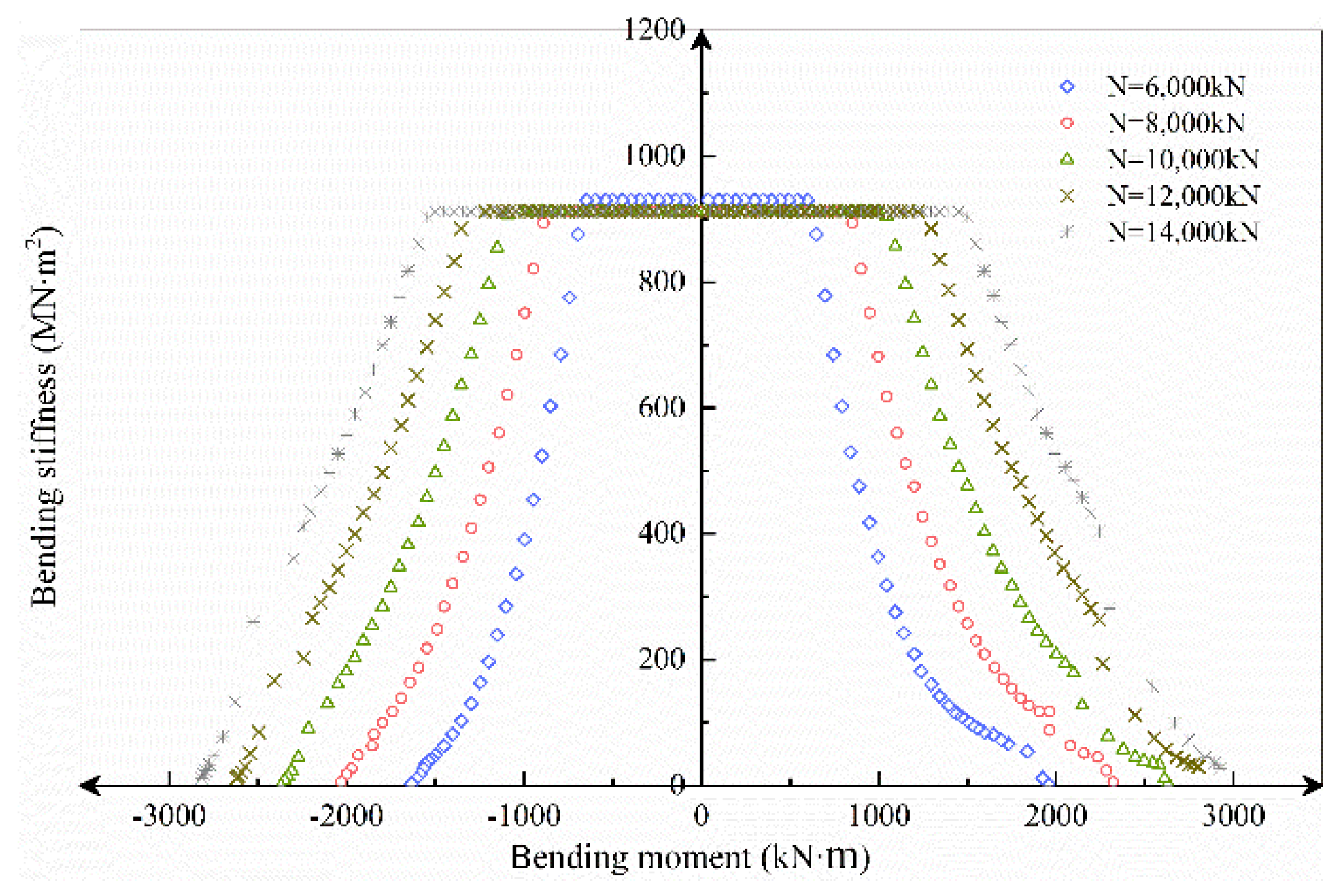
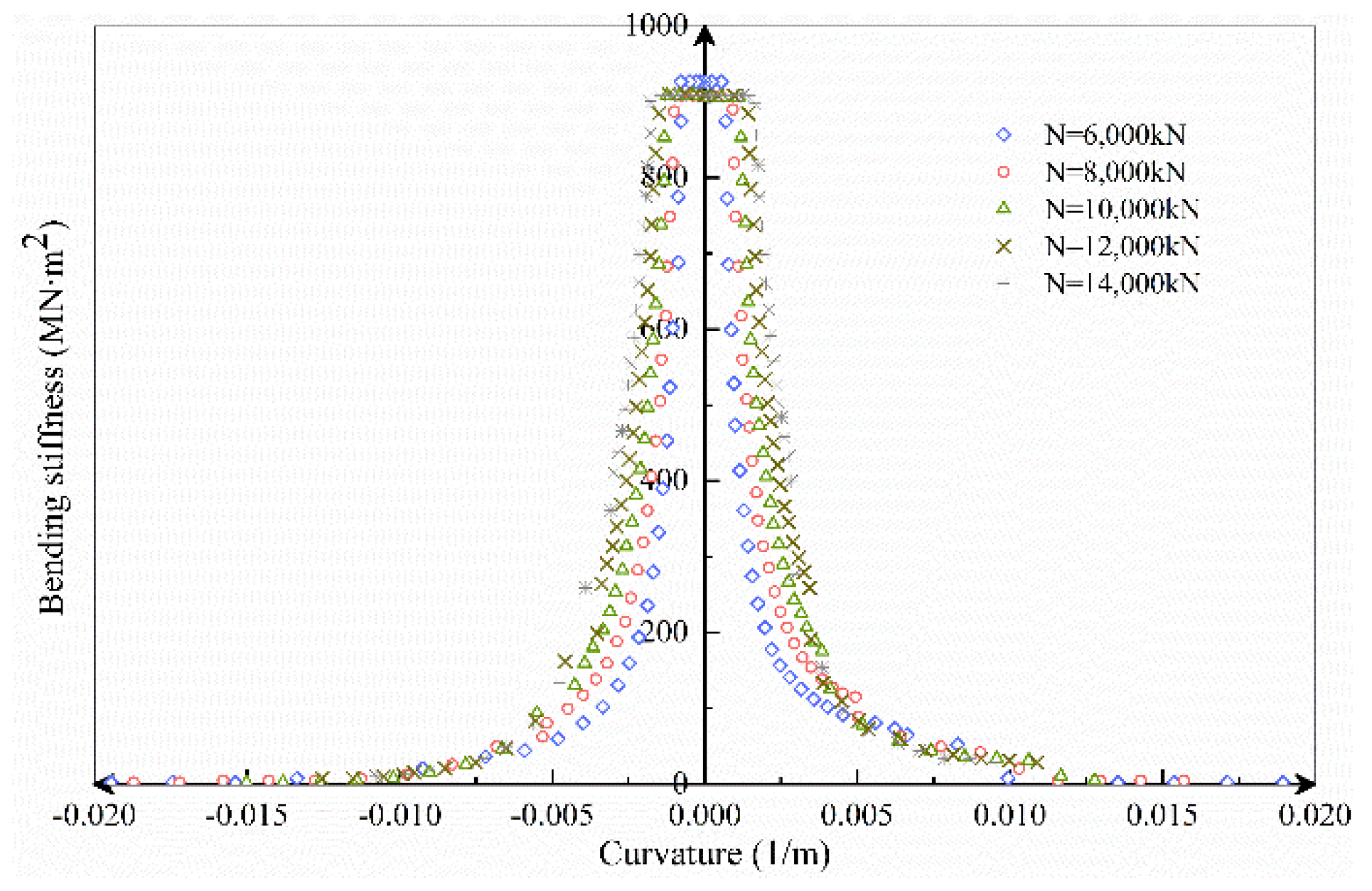
4.2. Influence of Axial Load on Bending Stiffness of the Segmental Joint
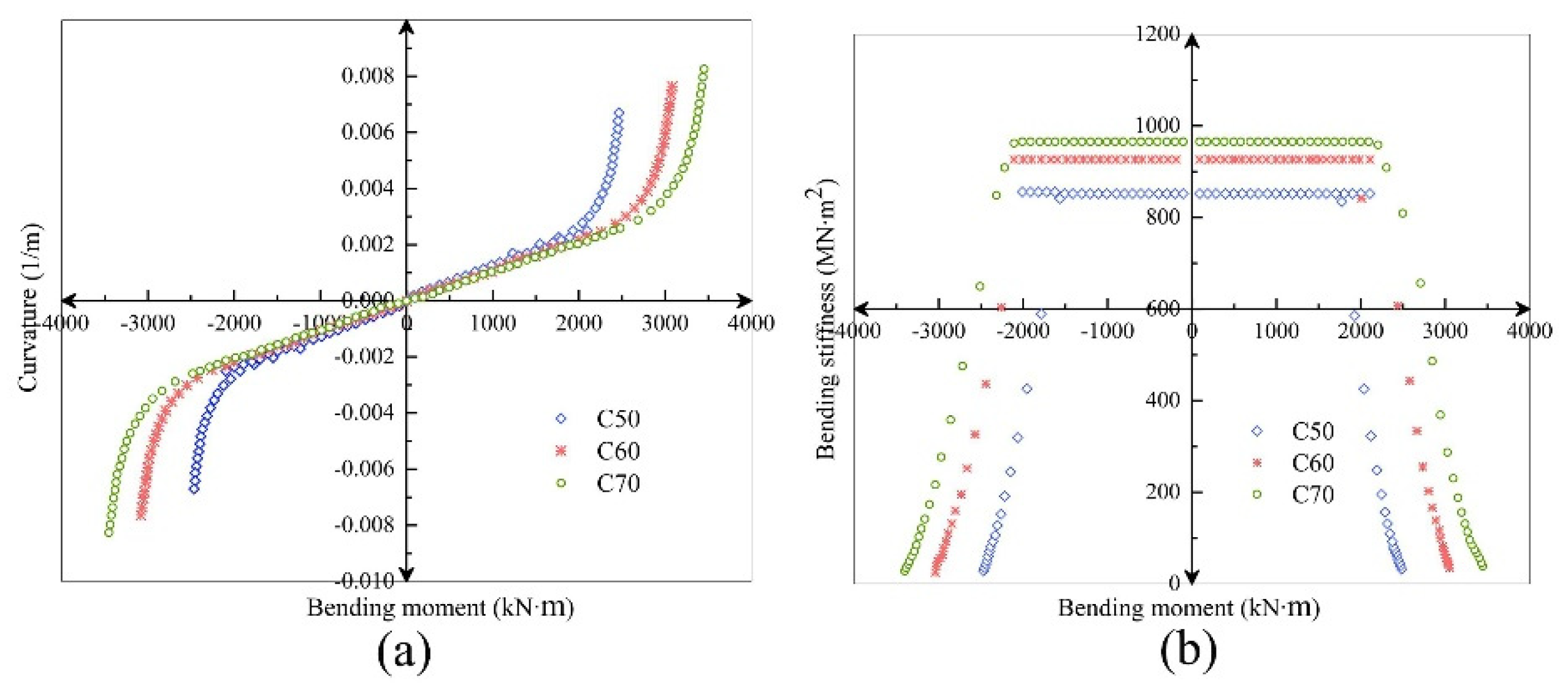
4.3. Influence of Concrete Strength on Bending Stiffness of the Segmental Joint
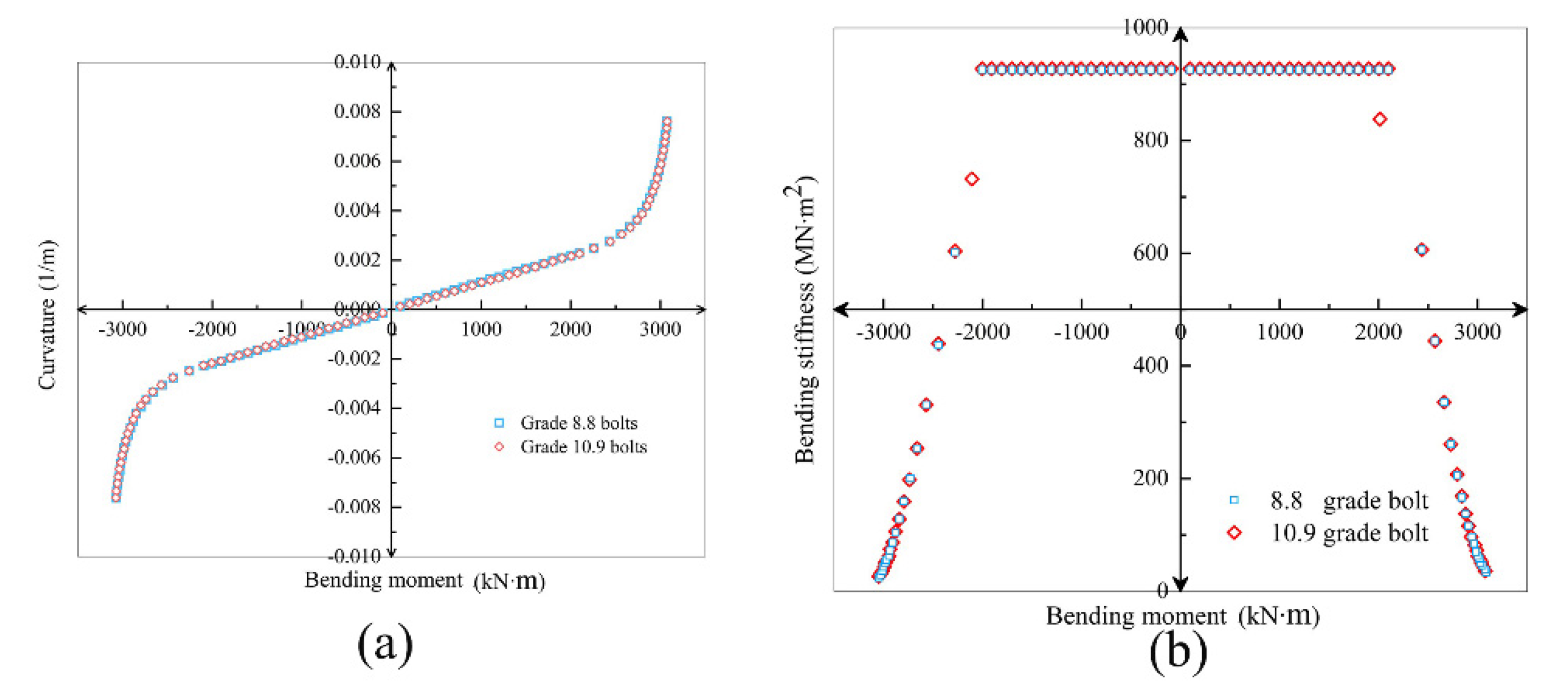
4.4. Influence of Bolt Strength on the Bending Stiffness of the Segmental Joint
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ε0 | Yield compressive strain of concrete |
| εcu | Ultimate compressive strain of concrete |
| εx0 | Strain energy equivalent to yield compressive strain of concrete |
| εs | Bolt strain |
| εsy | Bolt yield strain |
| Ex0 | Strain energy equivalent concrete elastic modulus |
| Es | Bolt elastic modulus |
| xn | Height of compression zone of joint concrete |
| h | Segment height, 650 mm |
| b | Segment width, 2000 mm |
| h0 | Distance from bolt center to concrete far from bolt side |
| ϕ | The curvature of the joint under bending moment and axial force |
| σt | Concrete stress on the edge away from the bolt |
| σb | Concrete stress near the edge of the bolt |
| εt | Concrete strain on the edge away from the bolt |
| εb | Concrete strain near the edge of the bolt |
| fc | Design value of concrete yield strength |
| fsy | Design value of bolt tensile strength |
| σs | Bolt stress |
| σc | Concrete stress |
| As | Total cross-sectional area of joint bolts |
References
- Teachavorasinskun, S.; Chub-Uppakarn, T. Influence of segmental joints on tunnel lining. Tunn. Undergr. Space Technol. 2010, 25, 490–494. [Google Scholar] [CrossRef]
- Ding, W.; Yue, Z.; Tham, L.; Zhu, H.; Lee, C.; Hashimoto, T. Analysis of shield tunnel. Int. J. Numer. Anal. Methods Géoméch. 2004, 28, 57–91. [Google Scholar] [CrossRef]
- Ding, W.-Q.; Peng, Y.-C.; Yan, Z.-G.; Shen, B.-W.; Zhu, H.-H.; Wei, X.-X. Full-scale testing and modeling of the mechanical behavior of shield TBM tunnel joints. Struct. Eng. Mech. 2013, 45, 337–354. [Google Scholar] [CrossRef]
- Do, N.A.; Dias, D.; Oreste, P.; Djeran-Maigre, I. 2D numerical investigation of segmental tunnel lining behavior. Tunn. Undergr. Space Technol. 2013, 37, 115–127. [Google Scholar] [CrossRef]
- Murakami, H.; Koizumi, A. On the behaviour of the transverse joints of a segment. Proc. Jpn. Soc. Civ. Eng. 1980, 1980, 73–86. [Google Scholar] [CrossRef] [Green Version]
- Iftimie, T. Design consideration and testings in shield driven tunnels. In Proceedings of the Ita International Congress Towards New Worlds in Tunnelling, Acapulco, Mexico, 16–20 May 1992; Balkema: Rotterdam, The Netherlands, 1992; pp. 321–326, ISBN 90-5410-050-8. [Google Scholar]
- Feng, K.; Zhang, L.; Guo, W.; Yang, R.; He, C.; Zhang, J. Analysis on the stiffness iteration of segmental joints in segmental linings: Method and sensitivity analysis. Tunn. Undergr. Space Technol. 2021, 115, 104043. [Google Scholar] [CrossRef]
- Dongmei, Z.; Zhenyu, F.; Hongwei, H. Calculation method of shield tunnel lining considering mechanical characteristics of joints. Rock Soil Mech. 2010, 31, 2546–2552. [Google Scholar]
- Arnau, O.; Molins, C. Experimental and analytical study of the structural response of segmental tunnel linings based on an in situ loading test. Part 2: Numerical simulation. Tunn. Undergr. Space Technol. 2011, 26, 778–788. [Google Scholar] [CrossRef] [Green Version]
- Lee, K.M.; Ge, X.W. The equivalence of a jointed shield-driven tunnel lining to a continuous ring structure. Can. Geotech. J. 2001, 38, 461–483. [Google Scholar] [CrossRef]
- Lee, K.M.; Hou, X.Y.; Ge, X.W.; Tang, Y. An analytical solution for a jointed shield-driven tunnel lining. Int. J. Numer. Anal. Methods Géoméch. 2001, 25, 365–390. [Google Scholar] [CrossRef]
- Koyama, Y. Present status and technology of shield tunneling method in Japan. Tunn. Undergr. Space Technol. 2003, 18, 145–159. [Google Scholar] [CrossRef]
- Klappers, C.; Grübl, F.; Ostermeier, B. Structural analyses of segmental lining—coupled beam and spring analyses versus 3D-FEM calculations with shell elements. Tunn. Undergr. Space Technol. 2006, 21, 254–255. [Google Scholar] [CrossRef]
- Nikkhah, M.; Mousavi, S.S.; Zare, S.; Khademhosseini, O. Evaluation of structural analysis of tunnel segmental lining using beam-spring method and force-method (Case study: Chamshir water conveyance tunnel). J. Min. Environ. 2016, 8, 111–130. [Google Scholar]
- Li, X.; Yan, Z.; Wang, Z.; Zhu, H. A progressive model to simulate the full mechanical behavior of concrete segmental lining longitudinal joints. Eng. Struct. 2015, 93, 97–113. [Google Scholar] [CrossRef]
- Qiu, Y.; Hu, X.; Walton, G.; He, C.; He, C.; Ju, J.W. Full scale tests and a progressive failure model to simulate full mechanical behavior of concrete tunnel segmental lining joints. Tunn. Undergr. Space Technol. 2021, 110, 103834. [Google Scholar] [CrossRef]
- Blom, C.; van der Horst, E.; Jovanovic, P. Three-dimensional structural analyses of the shield-driven “Green Heart” tunnel of the high-speed line South. Tunn. Undergr. Space Technol. 1999, 14, 217–224. [Google Scholar] [CrossRef]
- Shirato, M.; Furuichi, K.; Takimoto, K.; Hara, H.; Mukuno, K.; Yoshida, K. Development of new composite segment and application to the tunneling project. Doboku Gakkai Ronbunshu 2003, 728, 157–174. [Google Scholar] [CrossRef] [Green Version]
- Hou-mei, Z.; Zheng-lin, Z.; Jian-hua, W. 3-D FEM analysis on prefabricated segmental joints of shield tunnel. J. Shanghai Jiaotong Univ. 2003, 37, 566. [Google Scholar]
- Zhang, W.; Koizumi, A. Behavior of composite segment for shield tunnel. Tunn. Undergr. Space Technol. 2010, 25, 325–332. [Google Scholar] [CrossRef]
- Gu, L. Influence of Installation Errors on Performance-Based Evaluation Index of Shield Tunnel in Soft Clays. Master’s Thesis, Tongji University, Shanghai, China, 2011. [Google Scholar]
- Wongsaroj, J. Three-Dimensional Finite element Analysis of Short and Long-Term Ground Response to Open-Face Tunnelling in Stiff Clay. Ph.D. Thesis, University of Cambridge, Cambridge, UK, 2006. [Google Scholar]
- Oggeri, C.; Oreste, P.; Spagnoli, G. The influence of the two-component grout on the behaviour of a segmental lining in tun-nelling. Tunn. Undergr. Space Technol. 2021, 109, 103750. [Google Scholar] [CrossRef]
- Li, Z.; Soga, K.; Wang, F.; Wright, P.; Tsuno, K. Behaviour of cast-iron tunnel segmental joint from the 3D FE analyses and development of a new bolt-spring model. Tunn. Undergr. Space Technol. 2014, 41, 176–192. [Google Scholar] [CrossRef]
- Ge, S.; Xie, D.; Ding, W.; Ouyang, W.B. Simplified numerical simulation method for segmental joints of shield tunnels. Chin. J. Geotech. Eng. 2013, 35, 34–39. [Google Scholar]
- Sharafat, A.; Khan, M.S.; Latif, K.; Seo, J. BIM-Based Tunnel Information Modeling Framework for Visualization, Management, and Simulation of Drill-and-Blast Tunneling Projects. J. Comput. Civ. Eng. 2021, 35, 04020068. [Google Scholar] [CrossRef]
- Timoshenko, S.P.; Goodier, J.N. Theory of Elasticity; McGraw-Hill: New York, NY, USA, 1951; pp. 29–34. [Google Scholar]
- Yan, Q.; Yao, C.; Yang, W.; He, C.; Geng, P.; Garcia-Granda, S. An Improved Numerical Model of Shield Tunnel with Double Lining and Its Applications. Adv. Mater. Sci. Eng. 2015, 2015, 430879. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Jiang, X.; Bai, Y. The influence of hand hole on the ultimate strength and crack pattern of shield tunnel segment joints by scaled model test. Front. Struct. Civ. Eng. 2019, 13, 1200–1213. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value |
|---|---|---|
| fc | uniaxial compressive strength | 27.5 MPa |
| ft | uniaxial tensile strength | 2.04 MPa |
| βt | shear transfer coefficient of gaping fissure | 0.5 |
| βc | shear transfer coefficient of closed cracks | 0.95 |
| E | elastic modulus | 3.6 × 104 MPa |
| ν | Poisson ratio | 0.2 |
| Tc | tensile stress release coefficient | 0.6 |
| Segment | Bolt | Concrete | |||
|---|---|---|---|---|---|
| Width b/mm | Thickness h/mm | Diameter /mm | Strength level | Label | The design value of compressive strength |
| 2000 | 650 | 27 | 8.8 | C60 | 27.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kou, L.; Xiong, Z.; Cui, H.; Zhao, J. Study on Mechanical Characteristics of Segmental Joints of a Large-Diameter Shield Tunnel under Ultrahigh Water Pressure. Sensors 2021, 21, 8392. https://doi.org/10.3390/s21248392
Kou L, Xiong Z, Cui H, Zhao J. Study on Mechanical Characteristics of Segmental Joints of a Large-Diameter Shield Tunnel under Ultrahigh Water Pressure. Sensors. 2021; 21(24):8392. https://doi.org/10.3390/s21248392
Chicago/Turabian StyleKou, Lei, Zhihui Xiong, Hao Cui, and Jinjie Zhao. 2021. "Study on Mechanical Characteristics of Segmental Joints of a Large-Diameter Shield Tunnel under Ultrahigh Water Pressure" Sensors 21, no. 24: 8392. https://doi.org/10.3390/s21248392
APA StyleKou, L., Xiong, Z., Cui, H., & Zhao, J. (2021). Study on Mechanical Characteristics of Segmental Joints of a Large-Diameter Shield Tunnel under Ultrahigh Water Pressure. Sensors, 21(24), 8392. https://doi.org/10.3390/s21248392