
Review of Current Guided Wave Ultrasonic Testing (GWUT) Limitations and Future Directions



Abstract
:1. Introduction
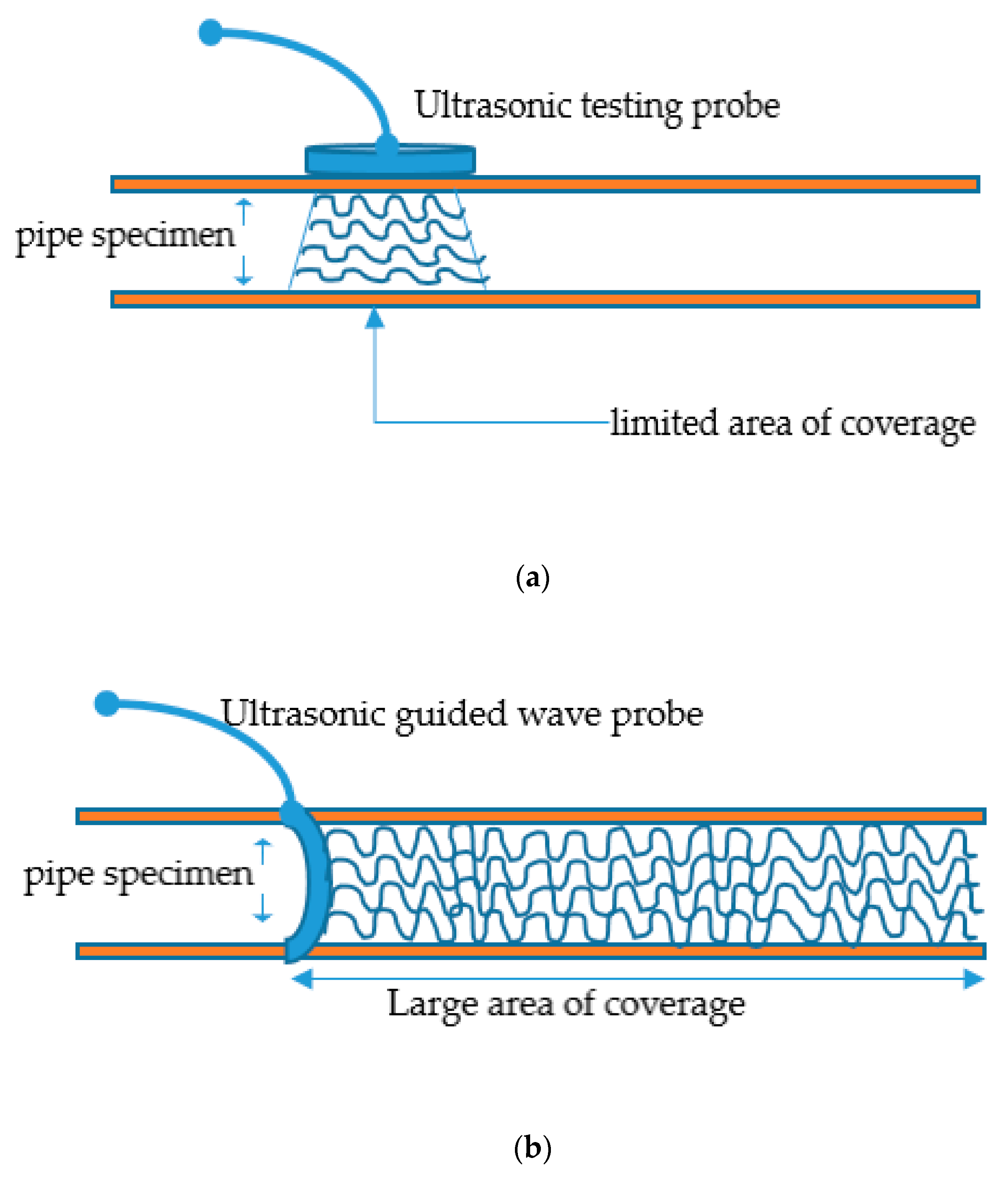
2. Ultrasonic Guided Wave, UGW
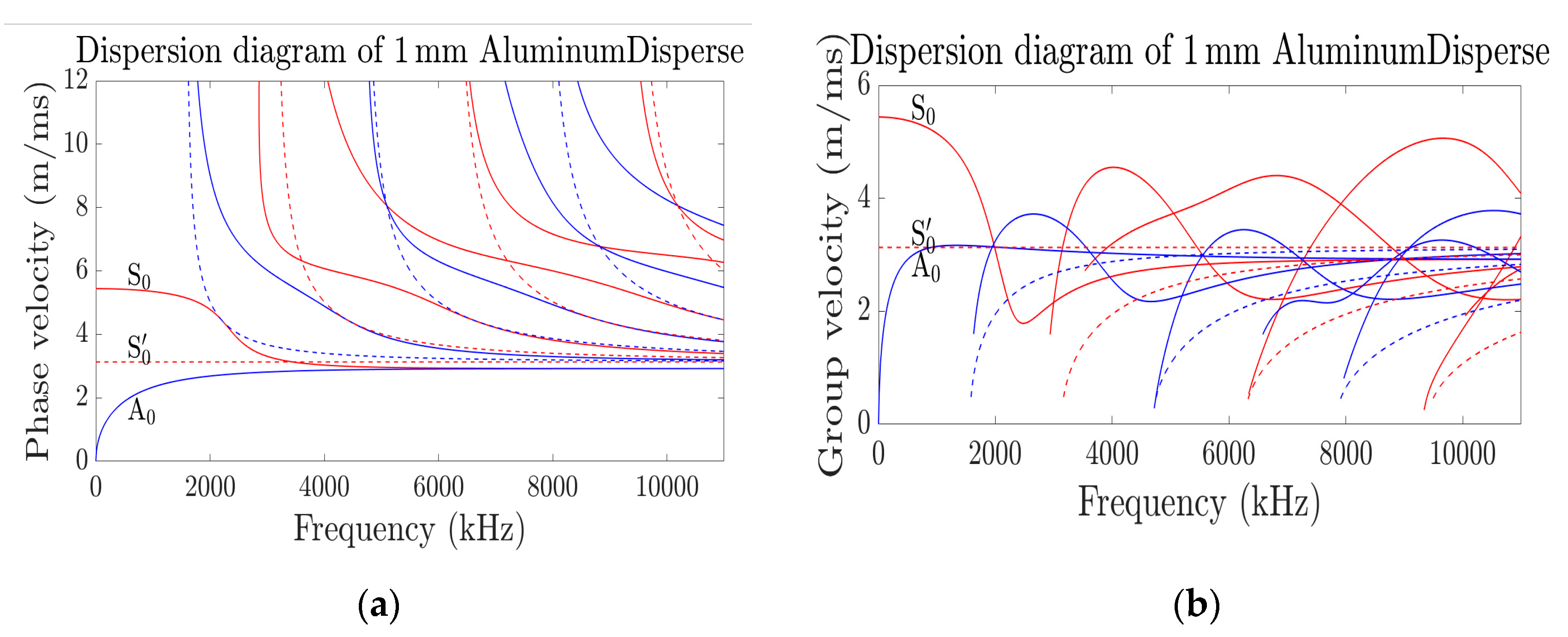
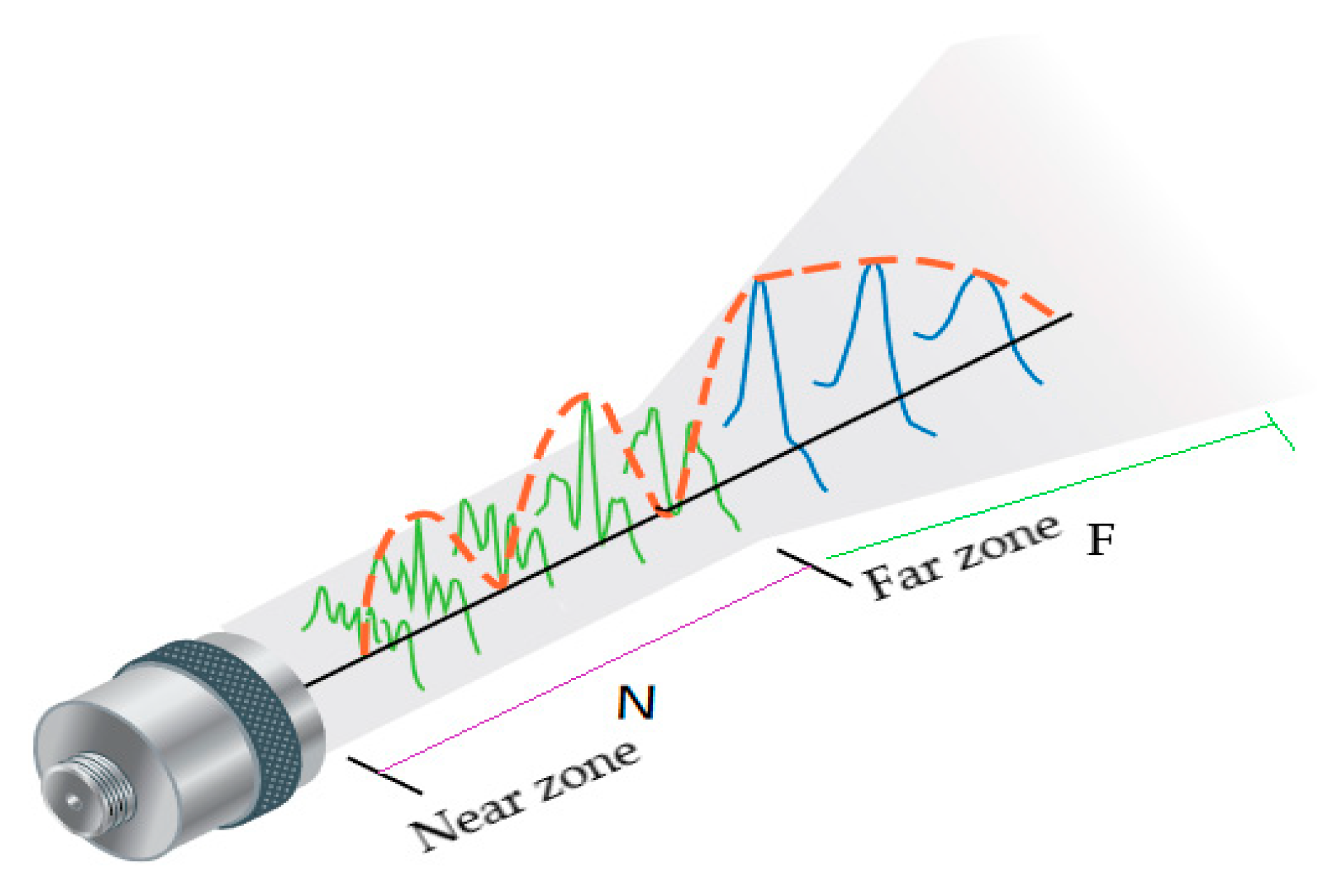
2.1. Wave Propagation and Dispersion
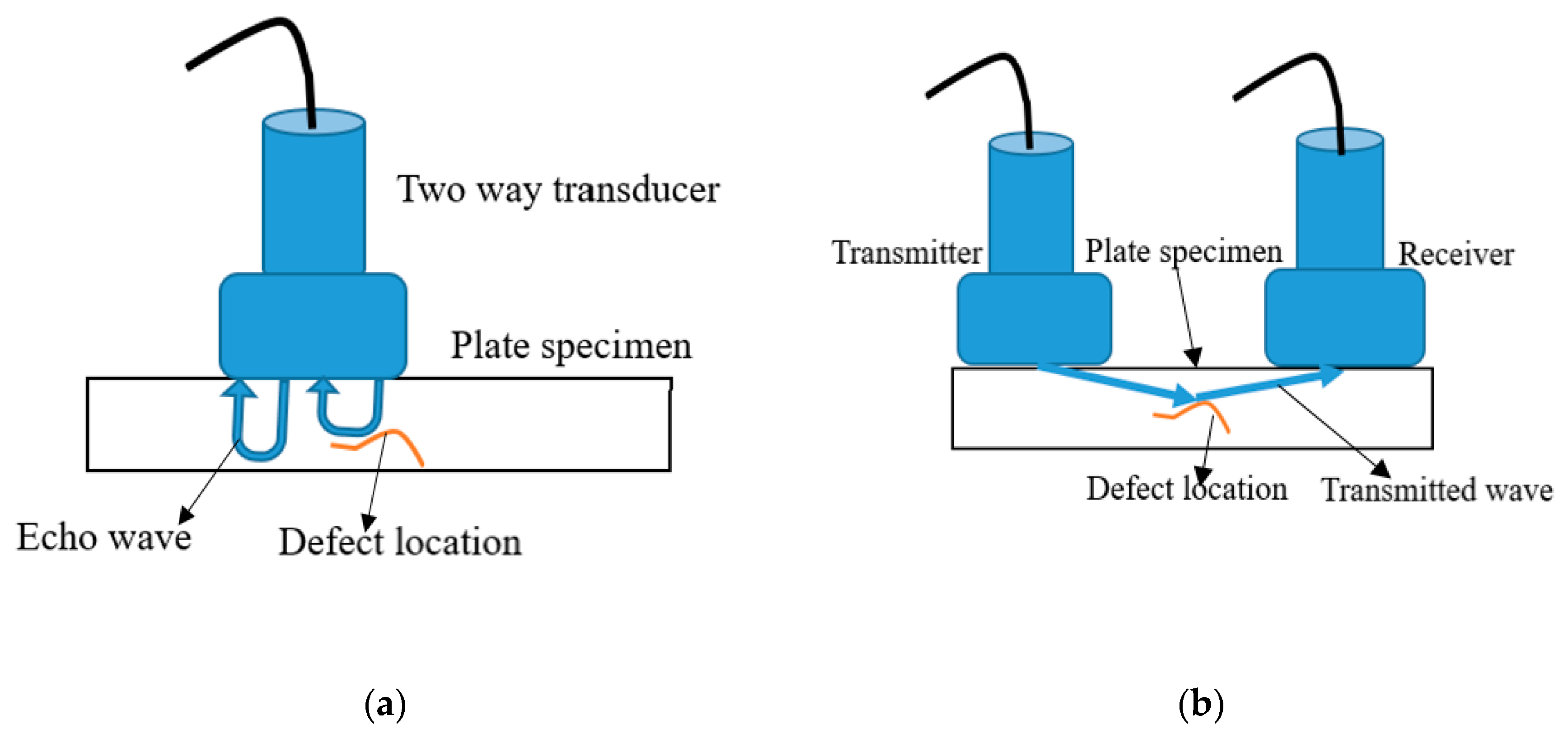
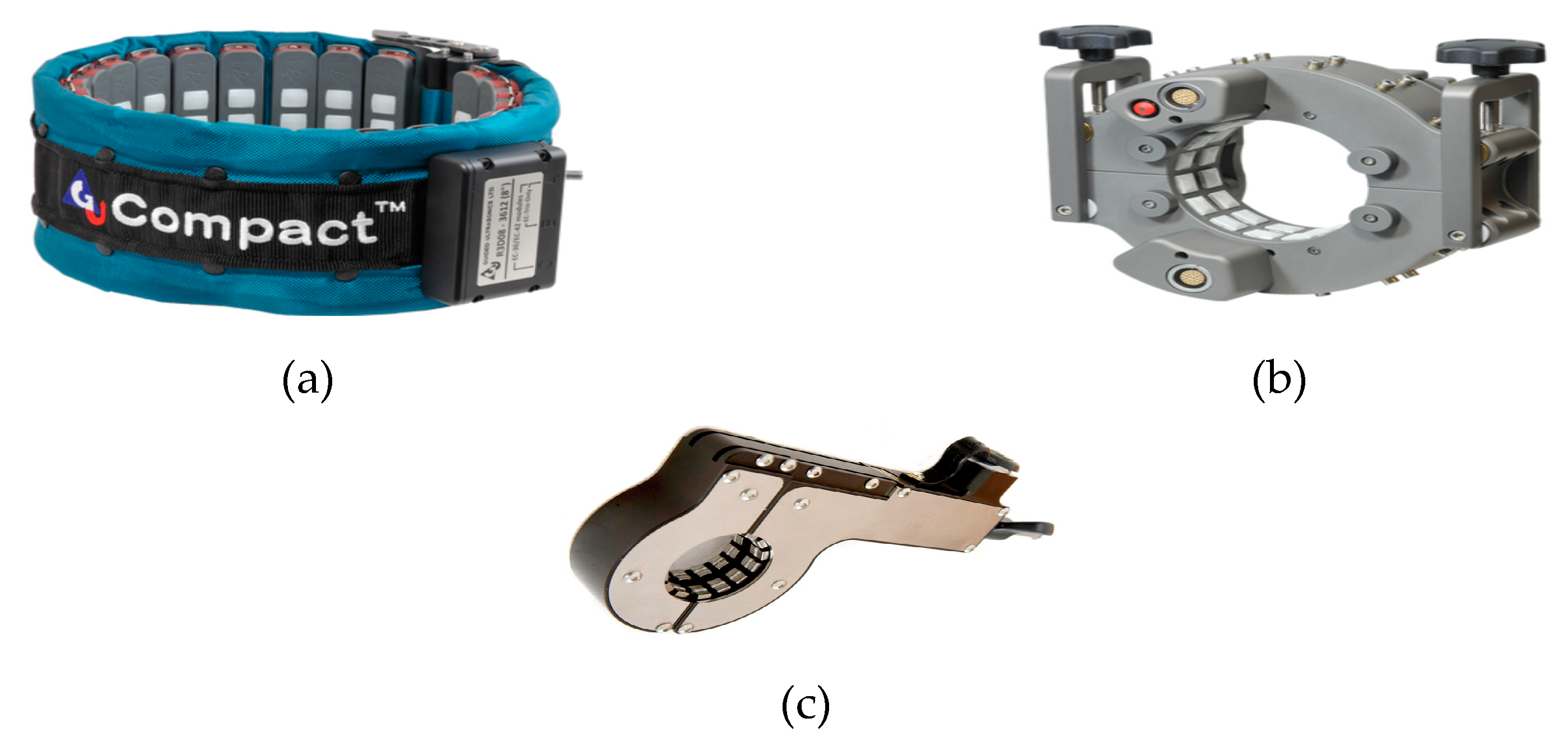
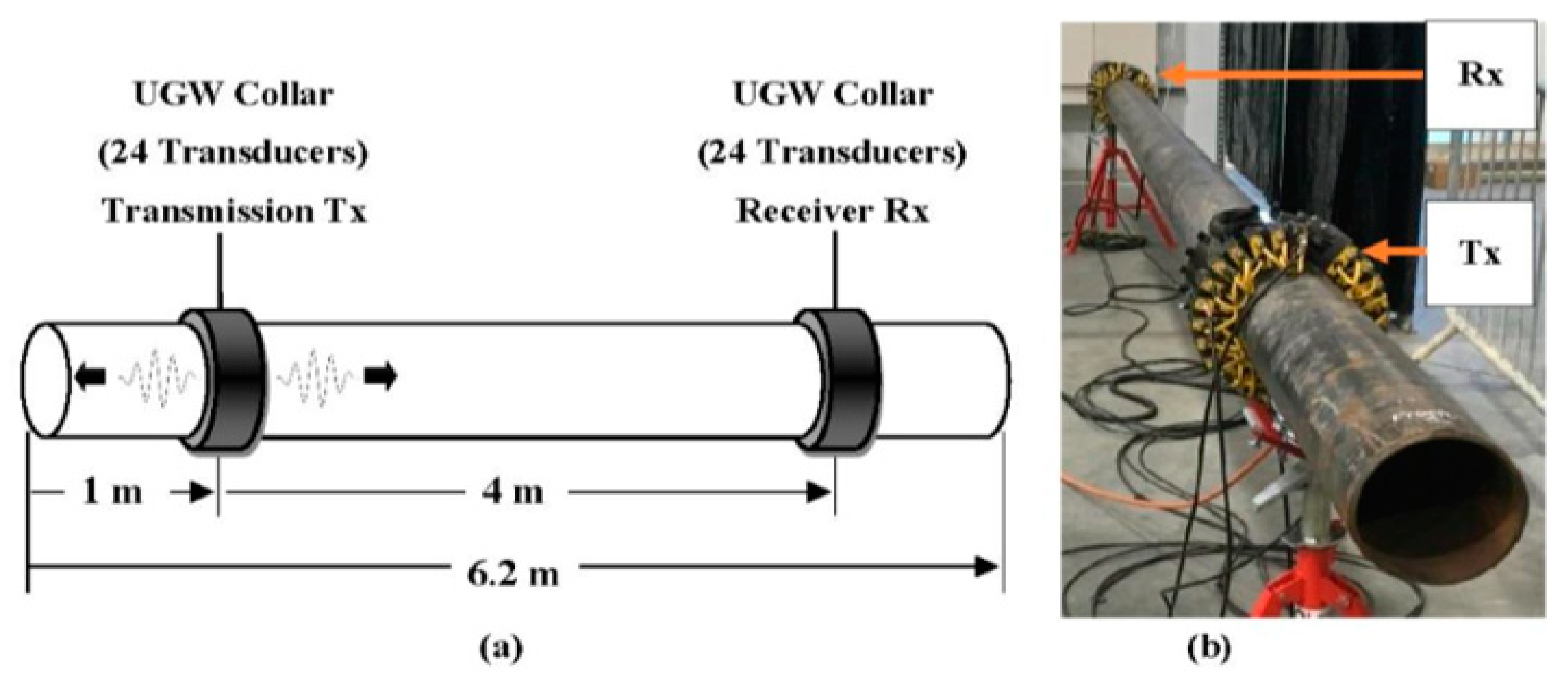
2.2. Transducer Arrangement and Configuration for Inspection of Structure
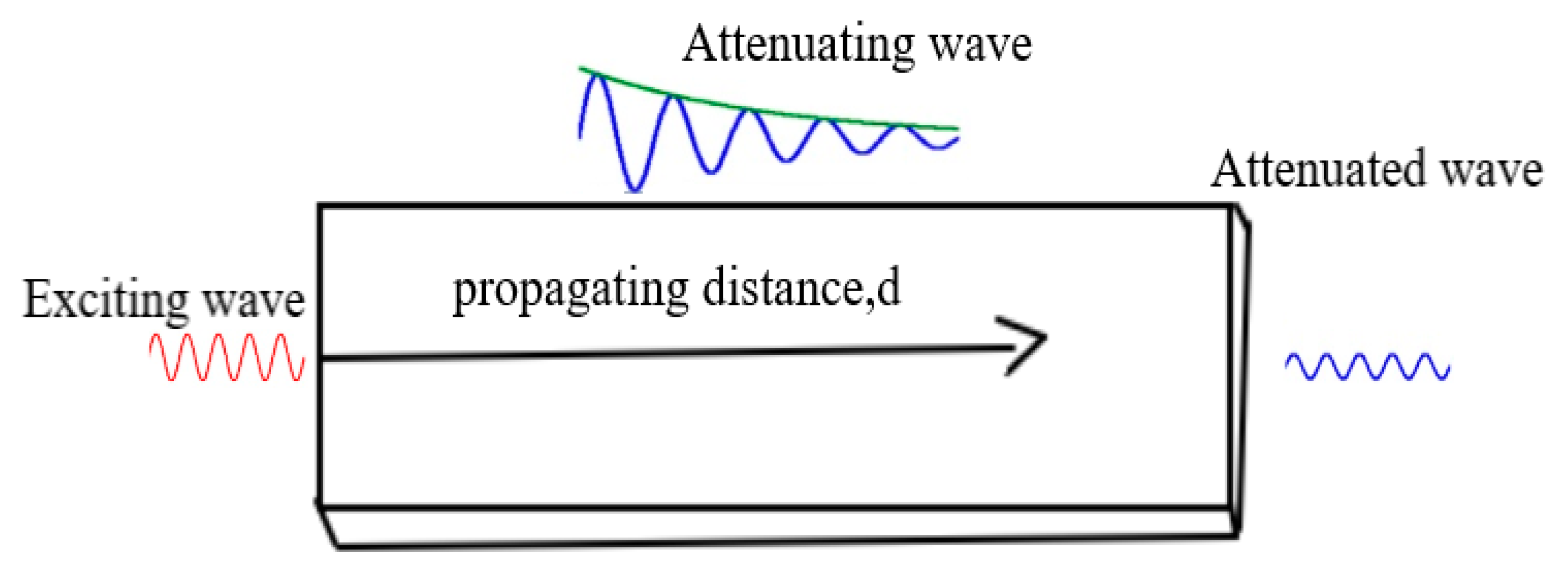
2.3. Attenuation of Propagating Wave
- = unattenuated signal amplitude
- = coeffiecient of attenuation
- = signal travelled distance
2.4. Damage Severity Indicator, DSI

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | DI Time-Based | DI Frequency-Based | Remark |
|---|---|---|---|
| [99] | Coefficient of CWT, Z = Where A = Fraction of the total energy of the CWT that lies at the centred frequency B = Fraction of the total energy of the CWT that lies at the higher frequency C = Fraction of the total energy of the CWT that lies at the lower frequency | Thickness reduction in a thin plate | |
| [58] | Peak amplitude coefficient, Where A1 = amplitude of the fundamental wave and A2 = amplitude of the second harmonic | Fatigue crack propagation in aluminium pipe | |
| [27] | The beat wavelength, KA0 and Ks0 are the wavenumbers of the fundamental symmetric and antisymmetric | Monitored thickness reduction due to general corrosion activity | |
| [90] | Awel = Peak amplitude at the weld Awel = Peak amplitude from a direct source | The severity of damage in the fluid-filled pipe | |
| [101] | fd = the spectral signal frequency response at damage state fbL = the spectral signal frequency response at the undamaged state | Corrosion severity detection in pipeline | |
| [59] | for i,j = 1~6 where: DIij(fex) = Damage signal differential = Baseline signal when pairing the i-th PZT actuator and the j-th PZT sensor at a given excitation frequency (fex). = damage signals when the corrosion damage was present at the targeted position of the plate. | Corrosion detection and severity in the plate Aluminium | |
| [61] | Spectral density, Where|| = spectral magnitude of the fundamental frequency || = Spectral magnitude of the second harmonic frequency | Microscale crack detection in a plate structure |
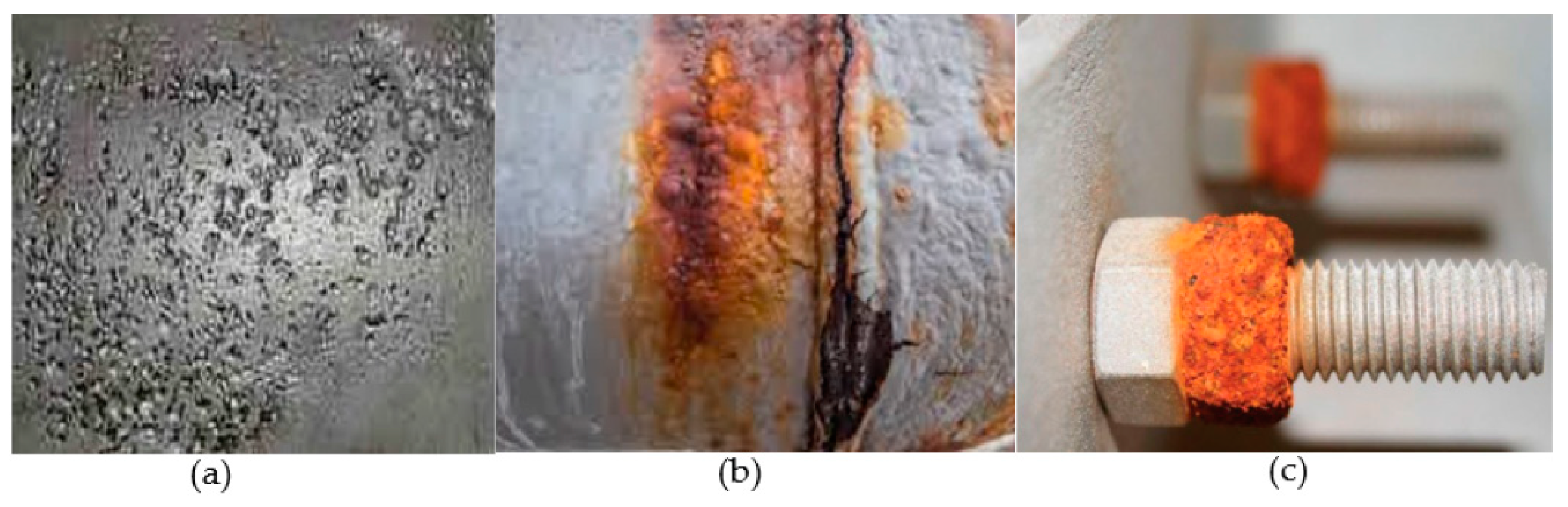
2.5. Corrosion and Sensitivity
- DI = the damage index for each affected paths
- fd = the spectral signal frequency response at damage state
- fbL = the spectral signal frequency response at the undamaged state
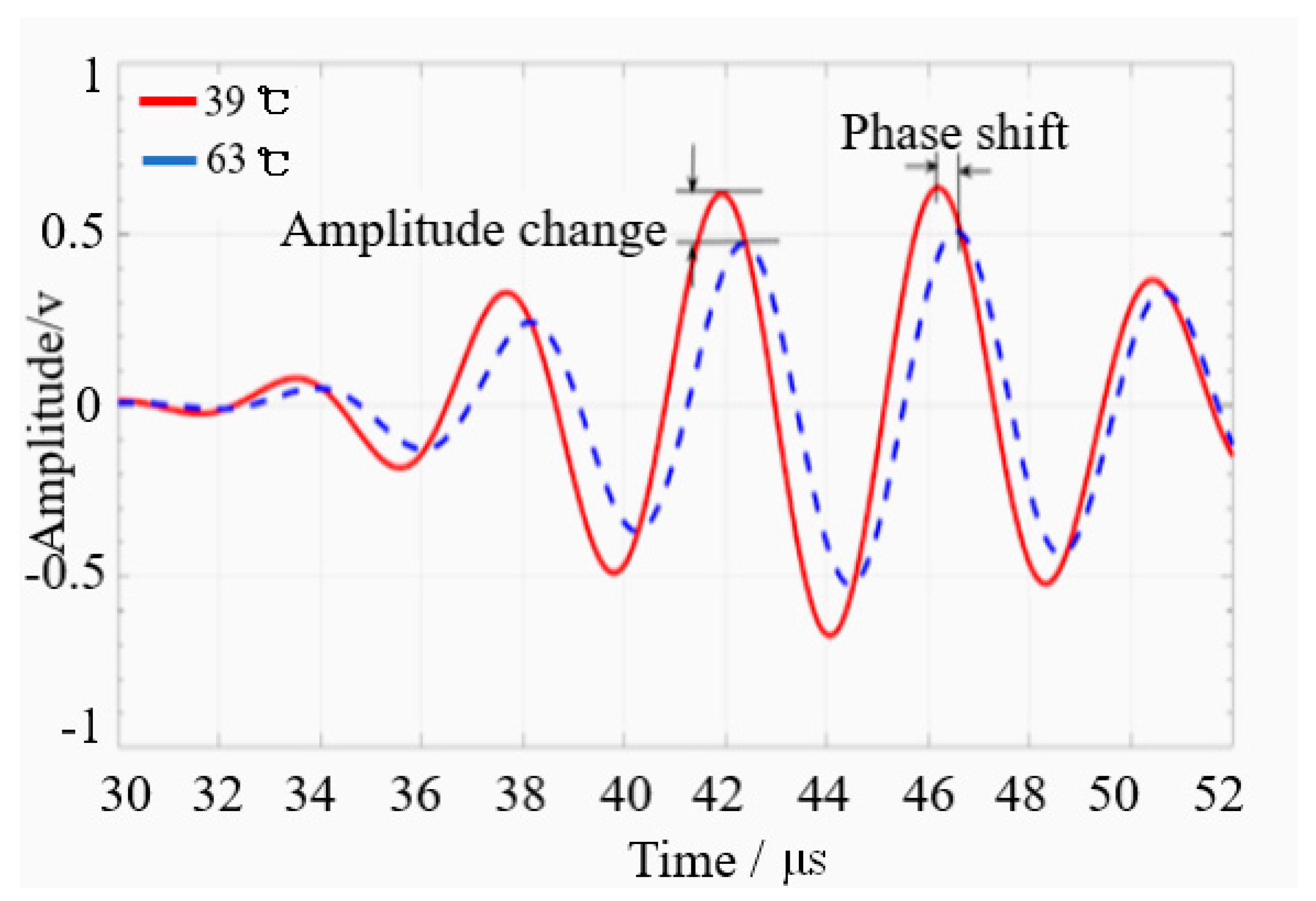
3. Effect of Environmental Conditions on Guided Wave and Ultrasonic Parametric Features
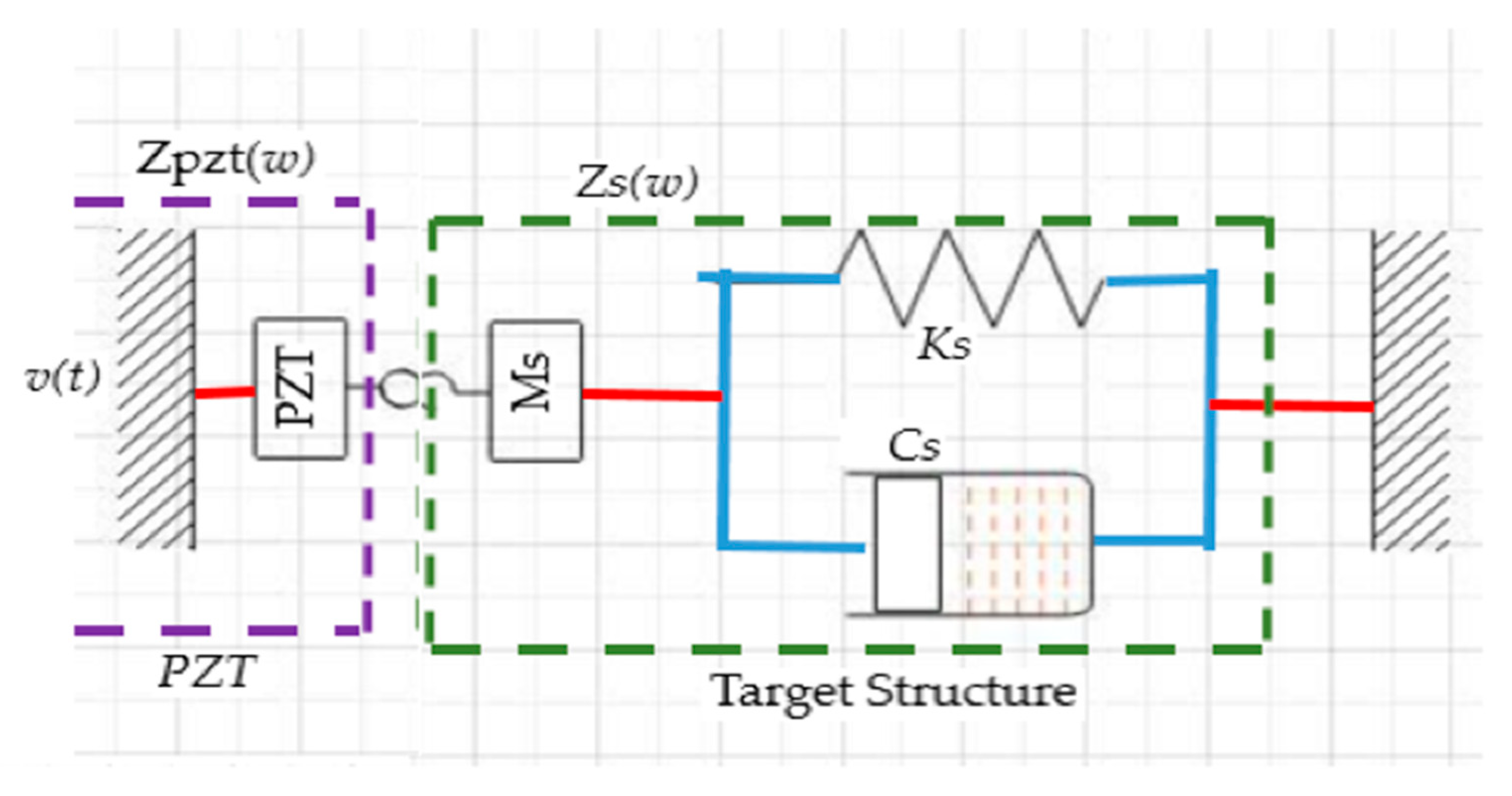
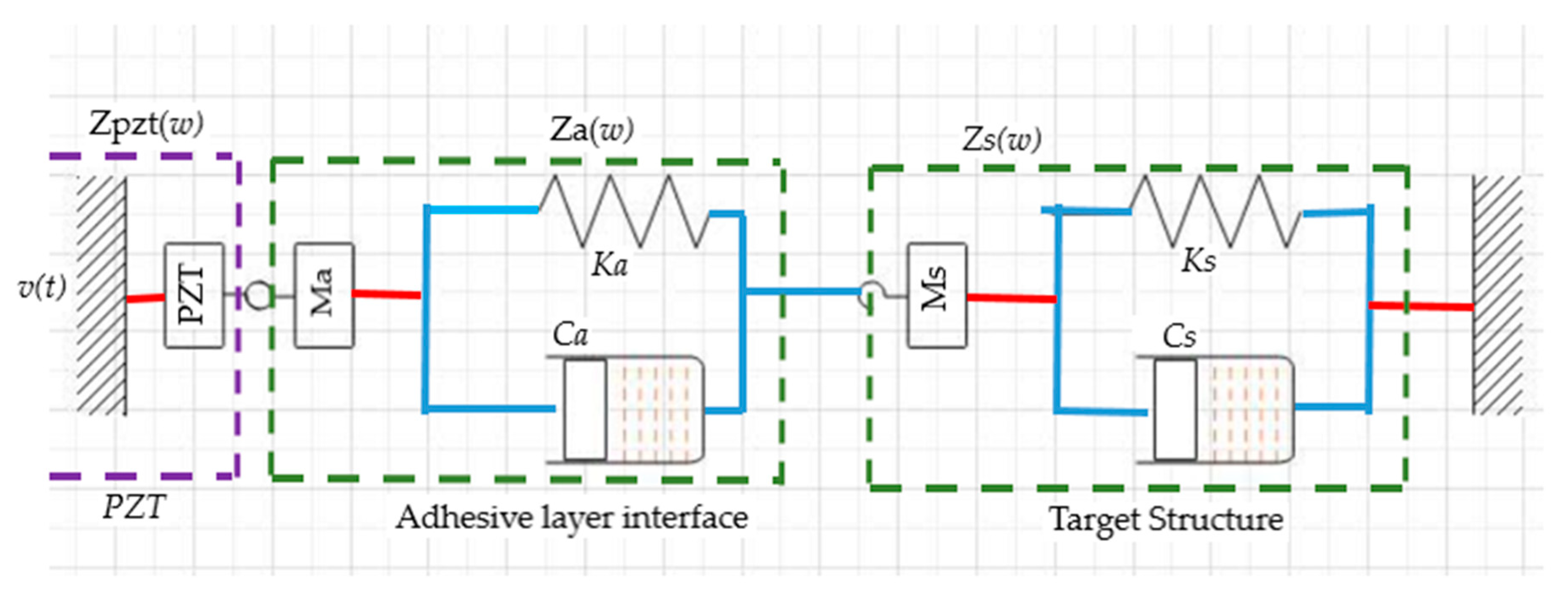
4. Impedance-Based Model Damage Detection
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Animah, I.; Shafiee, M. Condition assessment, remaining useful life prediction and life extension decision making for offshore oil and gas assets. J. Loss Prev. Process. Ind. 2018, 53, 17–28. [Google Scholar] [CrossRef] [Green Version]
- Toutanji, H. Ultrasonic wave velocity signal interpretation of simulated concrete bridge decks. Mater. Struct. 2000, 33, 207–215. [Google Scholar] [CrossRef]
- Di Scalea, F.L.; Salamone, S. Temperature effects in ultrasonic Lamb wave structural health monitoring systems. J. Acoust. Soc. Am. 2008, 124, 161. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lu, Y.; Michaels, J.E. A methodology for structural health monitoring with diffuse ultrasonic waves in the presence of temperature variations. Ultrasonics 2005, 43, 717–731. [Google Scholar] [CrossRef]
- Wang, G.; Wang, Y.; Sun, H.; Miao, B.; Wang, Y. A reference matching-based temperature compensation method for ultrasonic guided wave signals. Sensors 2019, 19, 5174. [Google Scholar] [CrossRef] [Green Version]
- Lee, B.C.; Manson, G.; Staszewski, W.J. Environmental Effects on Lamb Wave Responses from Piezoceramic Sensors. Mater. Sci. Forum 2003, 440, 195–202. [Google Scholar] [CrossRef]
- Sun, H.; Yi, J.; Xu, Y.; Wang, Y.; Qing, X. Identification and compensation technique of non-uniform temperature field for Lamb wave-and multiple sensors-based damage detection. Sensors 2019, 19, 2930. [Google Scholar] [CrossRef] [Green Version]
- Vospernig, M.; Heuer, R.; Reiterer, M. Demonstration of guided wave sensor signals effected by cyclic loads and breathing fatigue cracks. In Proceedings of the 6th European Workshop—Structural Health Monitoring 2012, EWSHM 2012, Dresden, Germany, 3–6 July 2012; Volume 1, pp. 643–650. [Google Scholar]
- Vanniamparambil, P.A.; Bartoli, I.; Hazeli, K.; Cuadra, J.; Schwartz, E.; Saralaya, R.; Kontsos, A. An integrated structural health monitoring approach for crack growth monitoring. J. Intell. Mater. Syst. Struct. 2012, 23, 1563–1573. [Google Scholar] [CrossRef]
- Bond, L.J.; Aquil, A. Fundamentals of Ultrasonic Nondestructive. In Fundamentals of Ultrasonic Inspection; ASM International: Almere, The Netherlands, 2018. [Google Scholar]
- Asif, M.; Khan, M.; Khan, S.Z.; Choudhry, R.; Khan, K. Identification of an effective nondestructive technique for bond defect determination in laminate composites—A technical review. J. Compos. Mater. 2018, 52, 3589–3599. [Google Scholar] [CrossRef] [Green Version]
- Ensminger, D.; Bond, L.J. Ultrasonics: Fundamentals, Technologies, and Applications, 3rd ed.; CRC Press Taylor & Francis Group: Boca Raton, FL, USA, 2011. [Google Scholar]
- Riveiro, B.; Solla, M. Non-Destructive Techniques for the Evaluation of Structures and Infrastructure; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Dhutti, A.; Kanfoud, J.; Gan, T.H.; Hernandez, B.; Mudge, P. IPERM: A guided wave pipeline monitoring tool for oil & gas industry. In Proceedings of the 9th European Workshop on Structural Health Monitoring, EWSHM, Manchester, UK, 10–13 July 2018. [Google Scholar]
- What Is Echolocation & How Do Bats Use It? Wildlife Online. Available online: https://www.wildlifeonline.me.uk/questions/answer/what-is-echolocation-how-do-bats-use-it (accessed on 19 August 2020).
- Ketten, D.R. Hearing by Whales and Dolphins, 1st ed.; Springer: New York, NY, USA; Berlin/Heidelberg, Germany, 2000; Volume 12. [Google Scholar]
- Tyack, P.L.; Clark, C.W. Communication and Acoustic Behavior of Dolphins and Whales; Springer Nature: Berlin/Heidelberg, Germany, 2000; Volume 12, pp. 156–224. [Google Scholar]
- Khatir, A.; Tehami, M.; Khatir, S.; Wahab, M.A. Damage detection and localization on thin plates using vibration analysis. In Proceedings of the ICSV 2016—23rd International Congress on Sound and Vibration: From Ancient to Modern Acoustics, Athens, Greece, 10–14 July 2016. [Google Scholar]
- Giurgiutiu, V.; Zagrai, A.; Bao, J. Damage Identification in Aging Aircraft Structures with Piezoelectric Wafer Active Sensors. J. Intell. Mater. Syst. Struct. 2004, 15, 673–687. [Google Scholar] [CrossRef]
- Harley, H.; Putman, E.A.; Roitblat, H.L. Bottlenose dolphins perceive object features through echolocation. Nat. Cell Biol. 2003, 424, 667–669. [Google Scholar] [CrossRef] [PubMed]
- Nachtigall, P.E.; Supin, A.Y. A false killer whale adjusts its hearing when it echolocates. J. Exp. Biol. 2008, 211, 1714–1718. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yovel, Y.; Au, W.W.L. How Can Dolphins Recognize Fish According to Their Echoes? A Statistical Analysis of Fish Echoes. PLoS ONE 2010, 5, e14054. [Google Scholar] [CrossRef] [PubMed]
- Au, W.W.; Branstetter, B.K.; Benoit-Bird, K.J.; Kastelein, R.A. Acoustic basis for fish prey discrimination by echolocating dolphins and porpoises. J. Acoust. Soc. Am. 2009, 126, 460. [Google Scholar] [CrossRef]
- Guan, R.; Lu, Y.; Duan, W.; Wang, X. Guided waves for damage identification in pipeline structures: A review. Struct. Control. Health Monit. 2017, 24, e2007. [Google Scholar] [CrossRef]
- Malo, S.; Fateri, S.; Livadas, M.; Mares, C.; Gan, T.-H. Wave Mode Discrimination of Coded Ultrasonic Guided Waves Using Two-Dimensional Compressed Pulse Analysis. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2017, 64, 1092–1101. [Google Scholar] [CrossRef] [PubMed]
- Moll, J.; Fritzen, C.-P. Guided waves for autonomous online identification of structural defects under ambient temperature variations. J. Sound Vib. 2012, 331, 4587–4597. [Google Scholar] [CrossRef]
- Fromme, P. Monitoring of corrosion damage using high-frequency guided ultrasonic waves. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring 2013, San Diego, CA, USA, 11–15 March 2013; p. 869502. [Google Scholar] [CrossRef] [Green Version]
- Niu, X.; Tee, K.F.; Marques, H.R. Enhancement of unidirectional excitation of guided torsional T(0,1) mode by linear superposition of multiple rings of transducers. Appl. Acoust. 2020, 168, 107411. [Google Scholar] [CrossRef]
- Pedram, S.K.; Mudge, P.; Gan, T.-H. Enhancement of Ultrasonic Guided Wave Signals Using a Split-Spectrum Processing Method. Appl. Sci. 2018, 8, 1815. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Huang, Y.; Chen, X.; Bai, Y. Isentropic wave propagation in a viscous fluid with uniform flow confined by a lined pipeline. J. Acoust. Soc. Am. 2014, 136, 1692–1701. [Google Scholar] [CrossRef]
- Rose, J.L. Ultrasonic Guided Waves in Solid Media; Cambridge University Press (CUP): Cambridge, UK, 2014. [Google Scholar]
- Chen, C.H. Ultrasonic and Advanced Methods for Nondestructive Testing and Material Characterization; World Scientific Pub. Co. Pte. Ltd.: Singapore, 2007. [Google Scholar]
- Dobson, J.; Cawley, P. Independent Component Analysis for Improved Defect Detection in Guided Wave Monitoring. Proc. IEEE 2015, 104, 1620–1631. [Google Scholar] [CrossRef] [Green Version]
- Toa, M.; Whitehead, A. Ultrasonic sensing. Ultrasonics 2020, 3, 217. [Google Scholar] [CrossRef]
- Feeney, A.; Kang, L.; Dixon, S. High-Frequency Measurement of Ultrasound Using Flexural Ultrasonic Transducers. IEEE Sens. J. 2018, 18, 5238–5244. [Google Scholar] [CrossRef] [Green Version]
- Guan, L.; Norris, A. Elastic wave scattering by rectangular cracks. Int. J. Solids Struct. 1992, 29, 1549–1565. [Google Scholar] [CrossRef]
- Liu, S.W.; Datta, S.K. Scattering of Ultrasonic Wave by Cracks in a Plate. J. Appl. Mech. 1993, 60, 352–357. [Google Scholar] [CrossRef]
- Wilby, A.J.; Neale, D.P. Defects introduced into metals during fabrication and service. Mater. Sci. Eng. 2009, 3, 48–75. [Google Scholar]
- Papaefthymiou, S.; Tzevelekou, T.; Antonopoulos, A.; Gypakis, A. Typical defects in plate and long steel products. Int. J. Struct. Integr. 2016, 7, 645–655. [Google Scholar] [CrossRef]
- Esu, O.E.; Wang, Y.; Chryssanthopoulos, M.K. Vibration-based damage indicators for corrosion detection in tubular structures. In Life-Cycle Analysis and Assessment in Civil Engineering: Towards an Integrated Vision, Proceedings of the 6th International Symposium on Life-Cycle Civil Engineering, IALCCE, Ghent, Belgium, 28–31 October 2018; CRC Press: Boca Raton, FL, USA, 2018; Volume 5, p. 259. [Google Scholar]
- Moughty, J.J.; Casas, J.R. A State of the Art Review of Modal-Based Damage Detection in Bridges: Development, Challenges, and Solutions. Appl. Sci. 2017, 7, 510. [Google Scholar] [CrossRef] [Green Version]
- Gillich, G.-R.; Praisach, Z.I.; Iancu, V.; Furdui, H.; Negru, I. Natural Frequency Changes due to Severe Corrosion in Metallic Structures. Stroj. Vestn. J. Mech. Eng. 2015, 61, 721–730. [Google Scholar] [CrossRef]
- Zai, B.A.; Khan, M.; Mansoor, A.; Khan, S.Z.; Khan, K. Instant Dynamic Response Measurements for Crack Monitoring in Metallic Beams. Insight Non Destr. Test. Cond. Monit. 2019, 61, 222–229. [Google Scholar] [CrossRef]
- Mokhles, M.; Ghavipanjeh, C.; Tamimi, A. The use of ultrasonic guided waves for extended pipeline qualification prediction. In Proceedings of the Singapore International NDT Conference & Exhibition, Singapore, 19–20 July 2013; pp. 19–20. Available online: http://www.ndt.net/article/SINCE2013/content/papers/1_Mokhles.pdf (accessed on 30 December 2020).
- Guofeng, D.; Zhizhong, Z. Research on Evaluation Index of Pipeline Structure Damage Based on Piezoelectric Impedance Method. In Proceedings of the International Conference on Pipelines and Trenchless Technology, Xi’an, China, 16–18 October 2013; pp. 622–630. Available online: https://ascelibrary.org/doi/abs/10.1061/9780784413142.009?src=recsys (accessed on 30 December 2020).
- Lowe, M.; Alleyne, D.; Cawley, P. Defect detection in pipes using guided waves. Ultrasonics 1998, 36, 147–154. [Google Scholar] [CrossRef]
- Jin, H.; Yan, J.; Li, W.; Qing, X. Monitoring of Fatigue Crack Propagation by Damage Index of Ultrasonic Guided Waves Calculated by Various Acoustic Features. Appl. Sci. 2019, 9, 4254. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Yang, C.; Ye, L.; Spray, D.; Xiang, Y. Evaluation of guided wave propagation in steel pipes. In Proceedings of the Recent Advances in Structural Integrity Analysis—Proceedings of the International Congress (APCF/SIF-2014); Elsevier: Amsterdam, The Netherlands, 2014; pp. 255–260. [Google Scholar]
- Kudela, P.; Radzieński, M.; Ostachowicz, W. Identification of cracks in thin-walled structures by means of wavenumber filtering. Mech. Syst. Signal Process. 2015, 50–51, 456–466. [Google Scholar] [CrossRef]
- Prasad, V.; Balasubramaniam, K.; Kannan, E.; Geisinger, K. Viscosity measurements of melts at high temperatures using ultrasonic guided waves. J. Mater. Process. Technol. 2008, 207, 315–320. [Google Scholar] [CrossRef]
- Marzani, A.; Salamone, S. Numerical prediction and experimental verification of temperature effect on plate waves generated and received by piezoceramic sensors. Mech. Syst. Signal Process. 2012, 30, 204–217. [Google Scholar] [CrossRef]
- Malekzadeh, M.; Gül, M.; Kwon, I.-B.; Catbas, N. An integrated approach for structural health monitoring using an in-house built fiber optic system and non-parametric data analysis. Smart Struct. Syst. 2014, 14, 917–942. [Google Scholar] [CrossRef]
- Khan, S.Z.; Khan, M.; Tariq, M.; Khan, K.; Khan, T.; Ali, T. Response of Gaussian-modulated guided wave in aluminum: An analytical, numerical, and experimental study. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 231, 3057–3065. [Google Scholar] [CrossRef] [Green Version]
- Eddyfi Technologies Acquires the Teletest Product Portfolio|Eddyfi. Available online: https://www.eddyfi.com/en/news/eddyfi-technologies-acquires-the-teletest-product-portfolio (accessed on 22 July 2020).
- Guided Ultrasonics—Technology You Can Trust|Guided Ultrasonics, Guided Wave Inspection Specialists. Available online: https://www.guided-ultrasonics.com/ (accessed on 22 July 2020).
- Home|Structural Integrity Associates. Available online: https://www.structint.com/ (accessed on 22 July 2020).
- Olympus Global Homepage. Available online: https://www.olympus-global.com/ (accessed on 22 July 2020).
- Guan, R.; Lu, Y.; Wang, K.; Su, Z. Detection of fatigue crack in an aluminium pipe with nonlinear guided waves. In Proceedings of the 7th Asia-Pacific Workshop on Structural Health Monitoring, APWSHM, Hong Kong, China, 12–15 November 2018; pp. 250–258. [Google Scholar]
- Yoo, B.; Purekar, A. Corrosion Damage Monitoring Using Guided Lamb Waves. In Proceedings of the ASME 2012 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, SMASIS 2012, Stone Mountain, GA, USA, 19–21 September 2012; Volume 1, pp. 757–764. [Google Scholar]
- Bagheri, A.; Rizzo, P. Guided ultrasonic wave testing of an immersed plate with hidden defects. Opt. Eng. 2015, 55, 11003. [Google Scholar] [CrossRef]
- Wang, J.; Shen, Y. Numerical Investigation of Nonlinear Lamb Wave Time Reversing for Fatigue Crack Detection. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition (IMECE), Salt Lake City, UT, USA, 11–14 November 2019; Volume 9, pp. 1–11. [Google Scholar]
- Shen, Y.; Giurgiutiu, V. Predictive modeling of nonlinear wave propagation for structural health monitoring with piezoelectric wafer active sensors. J. Intell. Mater. Syst. Struct. 2013, 25, 506–520. [Google Scholar] [CrossRef]
- Khalili, P.; Cawley, P. Excitation of Single-Mode Lamb Waves at High-Frequency-Thickness Products. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2015, 63, 303–312. [Google Scholar] [CrossRef] [Green Version]
- Alleyne, D.; Cawley, P. The interaction of Lamb waves with defects. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1992, 39, 381–397. [Google Scholar] [CrossRef] [PubMed]
- Fromme, P.; Bernhard, F.; Masserey, B. High-frequency guided ultrasonic waves to monitor corrosion thickness loss. In Proceedings of the AIP Conference Proceedings, Vladivostok, Russia, 18–22 September 2017. [Google Scholar]
- David, J.; Cheeke, N. Fundamentals and Applications of Ultrasonic Waves; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Qiu, L.; Yan, X.; Yuan, S.-F. Experimental study of guided waves propagation characteristics under the changing temperatures. Vibroeng. Procedia 2018, 20, 208–212. [Google Scholar] [CrossRef]
- Zhang, X.; Tang, Z.; Lv, F.; Pan, X. Excitation of axisymmetric and non-axisymmetric guided waves in elastic hollow cylinders by magnetostrictive transducers. J. Zhejiang Univ. Sci. A (Appl. Phys. Eng.) 2016, 17, 215–229. [Google Scholar] [CrossRef] [Green Version]
- Ghavamian, A.; Mustapha, F.; Baharudin, B.; Yidris, N. Detection, Localisation and Assessment of Defects in Pipes Using Guided Wave Techniques: A Review. Sensors 2018, 18, 4470. [Google Scholar] [CrossRef] [Green Version]
- Schmerr, L.W., Jr. Fundamentals of Ultrasonic Nondestructive Evaluation: A modeling Approach, 2nd ed.; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar]
- Meitzler, A.H. Mode Coupling Occurring in the Propagation of Elastic Pulses in Wires. J. Acoust. Soc. Am. 1961, 33, 435–445. [Google Scholar] [CrossRef]
- Dobson, J.; Cawley, P. The scattering of torsional guided waves from Gaussian rough surfaces in pipework. J. Acoust. Soc. Am. 2017, 141, 1852–1861. [Google Scholar] [CrossRef] [Green Version]
- Gao, H.; Rose, J.L. Goodness dispersion curves for ultrasonic guided wave based SHM: A sample problem in corrosion monitoring. Aeronaut. J. 2010, 114, 49–56. [Google Scholar] [CrossRef]
- Pavlakovic, B.; Lowe, M.; Alleyne, D.; Cawley, P. Disperse: A General Purpose Program for Creating Dispersion Curves. In Review of Progress in Quantitative Nondestructive Evaluation; Springer: Boston, MA, USA, 1997; pp. 185–192. [Google Scholar]
- Lowe, M. Disperse|Research groups|Imperial College London. Available online: http://www.imperial.ac.uk/non-destructive-evaluation/products-and-services/disperse/ (accessed on 1 October 2020).
- Catton, P.; Mudge, P.; Balachandran, W. Advances in defect characterisation using long-range ultrasonic testing of pipes. Insight Non-Destruct. Test. Cond. Monit. 2008, 50, 480–484. [Google Scholar] [CrossRef]
- Huber, A. The Dispersion Calculator: A Free Software for Calculating Dispersion Curves of Guided Waves in Multilayered Composites. Available online: https://www.dlr.de/zlp/en/desktopdefault.aspx/tabid-14332/24874_read-61142/ (accessed on 18 September 2020).
- Nandyala, A.R.; Darpe, A.K.; Singh, S.P. Effective stiffness matrix method for predicting the dispersion curves in general anisotropic composites. Arch. Appl. Mech. 2019, 89, 1923–1938. [Google Scholar] [CrossRef]
- Wang, L.; Rokhlin, S.I. Stable reformulation of transfer matrix method for wave propagation in layered anisotropic media. Ultrasonics 2001, 39, 413–424. [Google Scholar] [CrossRef]
- Kamal, A.; Giurgiutiu, V. Stiffness Transfer Matrix Method (STMM) for stable dispersion curves solution in anisotropic composites. In Health Monitoring of Structural and Biological Systems 2014; SPIE Smart Structures and NDE: San Diego, CA, USA, 2014; Volume 9064, p. 906410. [Google Scholar] [CrossRef]
- Edmonds, P.D. Methods of Experimental Physics: Ultrasonics, 19th ed.; Academic Press: New York, NY, USA, 1981. [Google Scholar]
- Khan, K.A.; Al-Mansoor, S.; Khan, S.Z. Piezoelectric Metamaterial with Negative and Zero Poisson’s Ratios. J. Eng. Mech. 2019, 145, 04019101. [Google Scholar] [CrossRef] [Green Version]
- Gao, W.; Liu, W.; Hu, Y.; Wang, J. Study of Ultrasonic Near-Field Region in Ultrasonic Liquid-Level Monitoring System. Micromachines 2020, 11, 763. [Google Scholar] [CrossRef]
- Olympus. Ultrasonic Transducers Technical Notes. Available online: https://mbi-ctac.sites.medinfo.ufl.edu/files/2017/02/ultrasound-basics.pdf (accessed on 8 December 2020).
- Shahzad, K.; Ahmad, A.M.S.; Khan, M.A. Ultrasonic testing using time of flight diffraction technique (TOFD). Available online: https://www.osti.gov/etdeweb/biblio/21498501 (accessed on 8 December 2020).
- Driveklepp, A. Ultrasound Examination of Steel Pipes. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2007. [Google Scholar]
- Inspection Rings—EN DE TEK. Available online: http://endetek.com.au/inspection-rings.html#/ (accessed on 22 July 2020).
- Niu, X.; Marques, H.R.; Chen, H.P. Transducer array optimisation for guided wave testing of pipes using finite element numerical simulations and experimental studies. In Proceedings of the SHMII 2017—8th International Conference on Structural Health Monitoring of Intelligent Infrastructure, Brisbane, Australia, 5–8 December 2017; pp. 1347–1356. [Google Scholar]
- Lais, H.; Lowe, P.S.; Gan, T.-H.; Wrobel, L.C.; Kanfoud, J. Characterization of the Use of Low Frequency Ultrasonic Guided Waves to Detect Fouling Deposition in Pipelines. Sensors 2018, 18, 2122. [Google Scholar] [CrossRef] [Green Version]
- Vogelaar, B.B.S.A.; Golombok, M.M. Simplified Ultrasonic Damage Detection in Fluid-Filled Pipes. J. Nondestruct. Eval. 2017, 36, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Wiskel, J.B.; Kennedy, J.; Ivey, D.G.; Henein, H. Ultrasonic Velocity and Attenuation Measurements in L80 Steel and their Correlation with Tensile Properties. In Proceedings of the 19th World Conference on Non-Destructive Testing, Munich, Germany, 13–17 June 2016; pp. 1–9. [Google Scholar]
- Michaels, J.E.; Michaels, T.E. Detection of Structural Damage from the Local Temporal Coherence of Diffuse Ultrasonic Signals. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2005, 52, 1769–1782. [Google Scholar] [CrossRef]
- Zima, B.; Kędra, R. Detection and size estimation of crack in plate based on guided wave propagation. Mech. Syst. Signal Process. 2020, 142, 106788. [Google Scholar] [CrossRef]
- Giurgiutiu, V.; Haider, M.F.; Bhuiyan, Y.; Poddar, B. Guided wave crack detection and size estimation in stiffened structures. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, Denver, CO, USA, 4–8 March 2018; p. 91. [Google Scholar] [CrossRef]
- Abbas, M.; Shafiee, M. Structural Health Monitoring (SHM) and Determination of Surface Defects in Large Metallic Structures using Ultrasonic Guided Waves. Sensors 2018, 18, 3958. [Google Scholar] [CrossRef] [Green Version]
- Rao, V.V.S.J.; Kannan, E.; Prakash, R.V.; Balasubramaniam, K. Fatigue damage characterization using surface acoustic wave nonlinearity in aluminum alloy AA7175-T7351. J. Appl. Phys. 2008, 104, 123508. [Google Scholar] [CrossRef]
- Pruell, C.; Kim, J.-Y.; Qu, J.; Jacobs, L.J. Evaluation of fatigue damage using nonlinear guided waves. Smart Mater. Struct. 2009, 18. [Google Scholar] [CrossRef]
- Quek, S.; Tua, P.; Jin, J. Comparison of Plain Piezoceramics and Inter-digital Transducer for Crack Detection in Plates. J. Intell. Mater. Syst. Struct. 2007, 18, 949–961. [Google Scholar] [CrossRef]
- Silva, M.; Gouyon, R.; Lepoutre, F. Hidden corrosion detection in aircraft aluminum structures using laser ultrasonics and wavelet transform signal analysis. Ultrasonics 2003, 41, 301–305. [Google Scholar] [CrossRef]
- Zhou, Y.-L.; Figueiredo, E.; Maia, N.; Perera, R. Damage detection and quantification using transmissibility Coherence Analysis. Shock. Vib. 2011, 25, 2475–2483. [Google Scholar] [CrossRef]
- Qing, X.P.; Beard, S.; Shen, S.B.; Banerjee, S.; Bradley, I.; Salama, M.M.; Chang, F.-K. Development of a real-time active pipeline integrity detection system. Smart Mater. Struct. 2009, 18. [Google Scholar] [CrossRef]
- Obot, O.W.; Anyakwo, C.N. An Investigation of Internal Corrosion of Oil and Gas Transporting Carbon Steel Pipes in the Niger Delta Area of Nigeria. Eur. J. Eng. Res. Sci. 2017, 2, 22. [Google Scholar] [CrossRef] [Green Version]
- Popoola, L.T.; Grema, A.S.; Latinwo, G.K.; Gutti, B.; Balogun, A.S. Corrosion problems during oil and gas production and its mitigation. Int. J. Ind. Chem. 2013, 4, 35. [Google Scholar] [CrossRef] [Green Version]
- Achebe, C.H.; Nneke, U.C.; Anisiji, O.E. Analysis of oil pipeline failures in the oil and gas industries in the Niger Delta area of Nigeria. In Proceedings of the International MultiConference of Engineers and Computer Scientiest, Hong Kong, 14–16 March 2012; pp. 1274–1279. [Google Scholar] [CrossRef] [Green Version]
- Nawrocki, J.; Raczyk-Stanisławiak, U.; Świetlik, J.; Olejnik, A.; Sroka, M.J. Corrosion in a distribution system: Steady water and its composition. Water Res. 2010, 44, 1863–1872. [Google Scholar] [CrossRef]
- Rajendran, S. Biotechnology for Rust Free Iron Metal Surface. APCBEE Procedia 2012, 3, 245–249. [Google Scholar] [CrossRef] [Green Version]
- Iloanusi, O.N.; Olisa, S.C.; Percy, U.; Nkpume, C. ANN and Regression Models for Estimation of Corrosion Rates of Metal Alloy Types in Oceans. Int. J. Sci. Eng. Res. 2017, 8, 407–416. [Google Scholar]
- Khalili, P.; Cawley, P. The choice of ultrasonic inspection method for the detection of corrosion at inaccessible locations. NDT E Int. 2018, 99, 80–92. [Google Scholar] [CrossRef]
- Wiersma, B. A Structural Integrity Assessment of the Tank farm Waste Transfer System. Available online: https://www.researchgate.net/profile/Bj_Wiersma/publication/268370729_A_Structural_Integrity_Assessment_of_the_Tank_Farm_Waste_Transfer_System/links/5a27eef2aca2727dd883e0b4/A-Structural-Integrity-Assessment-of-the-Tank-Farm-Waste-Transfer-System.pdf (accessed on 30 December 2020).
- Stress Corrosion Cracking—Metallic Corrosion. Available online: https://www.azom.com/article.aspx?ArticleID=102 (accessed on 5 December 2020).
- Different Types of Corrosion in Coated Carbon Steel Fasteners. Available online: https://www.constrofacilitator.com/different-types-of-corrosion-in-coated-carbon-steel-fasteners/ (accessed on 5 December 2020).
- Chatterjee, U.K.; Raman, R.K.S. 4—Stress Corrosion Cracking (SCC) in Low and Medium Strength Carbon Steels. In Stress Corrosion Cracking; Raja, V.S., Shoji, T., Eds.; Woodhead Publishing Limited: Cambridge, UK, 2011; pp. 169–198. [Google Scholar]
- Kim, Y.-S.; Kim, J.-G. Corrosion Behavior of Pipeline Carbon Steel under Different Iron Oxide Deposits in the District Heating System. Metals 2017, 7, 182. [Google Scholar] [CrossRef]
- Luo, W.; Rose, J.L.; Gao, H. A Peak Frequency Shift Method for Guided Wave Thickness Measurement and Its Realization by Different Transducer Techniques. In Proceedings of the 16th world conference on NDT, Montreal, QC, Canada, 30 August–3 September 2004. [Google Scholar]
- Fromme, P. Corrosion monitoring using high-frequency guided waves. In Proceedings of the 9th European Workshop on Structural Health Monitoring, EWSHM, Manchester, UK, 10–13 July 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Rao, J.; Ratassepp, M.; Lisevych, D.; Caffoor, M.H.; Fan, Z. On-Line Corrosion Monitoring of Plate Structures Based on Guided Wave Tomography Using Piezoelectric Sensors. Sensors 2017, 17, 2882. [Google Scholar] [CrossRef] [Green Version]
- Yu, L.; Giurgiutiu, V.; Pollock, P. A multi-mode sensing system for corrosion detection using piezoelectric wafer active sensors. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems, San Diego, CA, USA, 10–13 March 2008; p. 69322H. [Google Scholar]
- Liu, X.; Qin, L.; Ni, X.; Zhu, X.; Huang, S.; Cheng, X. Monitoring corrosion of steel bar using ultrasonic guided wave. In Proceedings of the 2016 4th International Conference on Machinery, Materials and Information Technology Applications, Xi’an, China, 10–11 December 2016. [Google Scholar]
- Jenot, F.; Ouaftouh, M.; Duquennoy, M.; Ourak, M. Corrosion thickness gauging in plates using Lamb wave group velocity measurements. Meas. Sci. Technol. 2001, 12, 1287–1293. [Google Scholar] [CrossRef]
- Nagy, P.B.; Simonetti, F.; Instanes, G. Corrosion and erosion monitoring in plates and pipes using constant group velocity Lamb wave inspection. Ultrasonics 2014, 54, 1832–1841. [Google Scholar] [CrossRef]
- Nurmalia, N.; Nakamura, N.; Ogi, H.; Hirao, M. Detection of Shear Horizontal Guided Waves Propagating in Aluminum Plate with Thinning Region. Jpn. J. Appl. Phys. 2011, 50, 07HC17. [Google Scholar] [CrossRef]
- Zai, B.A.; Khan, M.; Khan, K.; Mansoor, A. A novel approach for damage quantification using the dynamic response of a metallic beam under thermo-mechanical loads. J. Sound Vib. 2020, 469, 115134. [Google Scholar] [CrossRef]
- Cawley, P. Long range inspection of structures using low frequency ultrasound. In Proceedings of the DAMAS 97: Structural Damage Assessment Using Advanced Signal Processing Procedures, Sheffield, UK, 30 June–2 July 1997; pp. 1–17. [Google Scholar]
- Liu, Z. Temperature Dependence of Ultrasonic Longitudinal Guided Wave Propagation in Long Range Steel Strands. Chin. J. Mech. Eng. 2011, 24, 159–166. [Google Scholar] [CrossRef]
- Dhutti, A.; Gan, T.H.; Balachandran, W.; Kanfoud, J. High temperature performance of ultrasonic guided wave system for structural health monitoring of pipeline. In Proceedings of the 7th Asia-Pacific Workshop on Structural Health Monitoring, Hong Kong, 12–15 November 2018; pp. 308–316. [Google Scholar]
- Raghavan, A.; Cesnik, C.E.S. Studies on effects of elevated temperature for guided-wave structural health monitoring. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2007, San Diego, CA, USA, 19–22 March 2007. [Google Scholar] [CrossRef]
- Abbas, S.; Li, F.; Qiu, J.; Zhu, Y.; Tu, X. Optimization of ultrasonic guided wave inspection in structural health monitoring based on thermal sensitivity evaluation. J. Low Freq. Noise Vib. Act. Control. 2020. [Google Scholar] [CrossRef] [Green Version]
- Biagiotti, S.F. Effect of temperature on ultrasonic velocity in steel. In Proceedings of the Corrosion97, NACE International, New Orleans, LA, USA, 9–14 March 1997. [Google Scholar]
- Weaver, R.L.; Lobkis, O.I. Temperature dependence of diffuse field phase. Ultrasonics 2000, 38, 491–494. [Google Scholar] [CrossRef]
- Lim, H.J.; Sohn, H.; Desimio, M.P.; Brown, K. Reference-free fatigue crack detection using nonlinear ultrasonic modulation under various temperature and loading conditions. Mech. Syst. Signal Process. 2014, 45, 468–478. [Google Scholar] [CrossRef]
- Clarke, T.; Simonetti, F.; Cawley, P. Guided wave health monitoring of complex structures by sparse array systems: Influence of temperature changes on performance. J. Sound Vib. 2010, 329, 2306–2322. [Google Scholar] [CrossRef]
- Van Thanh, P.; Thi Tuyet Nhung, P.; Thi Minh Thuy, L.; Hoa Nhai, N. Effect of Temperature on Ultrasonic Velocities, Attenuations, Reflection and Transmission Coefficients between Motor Oil and Carbon Steel Estimated by Pulse-echo Technique of Ultrasonic Testing Method. VNU J. Sci. Math. Phys. 2015, 31, 39–48. [Google Scholar]
- Kien, D.T.; Van Thanh, P. Influence of temperature on mechanical characteristics of 1018 low carbon steel estimated by ultrasonic non-destructive testing method. Indian J. Pure Appl. Phys. 2017, 55, 431–435. [Google Scholar]
- Han, S.; Palazotto, A.; Leakeas, C.L. Finite-Element Analysis of Lamb Wave Propagation in a Thin Aluminum Plate. J. Aerosp. Eng. 2009, 22, 185–197. [Google Scholar] [CrossRef]
- Periyannan, S.; Rajagopal, P.; Balasubramaniam, K. Robust Ultrasonic Waveguide Based Distributed Temperature Sensing. Phys. Procedia 2015, 70, 514–518. [Google Scholar] [CrossRef] [Green Version]
- Eybpoosh, M.; Berges, M.; Noh, H.Y. Toward characterizing the effects of environmental and operational conditions on diffuse-field ultrasonic guided-waves in pipes. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems, San Diego, CA, USA, 10–13 March 2014. [Google Scholar] [CrossRef]
- Salmanpour, M.S.; Khodaei, Z.S.; Aliabadi, M. Guided wave temperature correction methods in structural health monitoring. J. Intell. Mater. Syst. Struct. 2016, 28, 604–618. [Google Scholar] [CrossRef] [Green Version]
- Wilcox, P.D.; Konstantinidis, G.; Croxford, A.J.; Drinkwater, B.W. Strategies for Guided Wave Structural Health Monitoring. Proc. R. Soc. A Math. Phys. Eng. Sci. 2007, 463, 2961–2981. [Google Scholar]
- Hesser, D.F.; Markert, B. Excitation strategies for vibration based damage detection using piezoelectric transducers and machine learning. PAMM 2016, 16, 141–142. [Google Scholar] [CrossRef]
- Raghavan, A.; Cesnik, C.E.S. Effects of Elevated Temperature on Guided-wave Structural Health Monitoring. J. Intell. Mater. Syst. Struct. 2008, 19, 1383–1398. [Google Scholar] [CrossRef]
- Blaise, E.J.; Chang, F.-K. Built-in damage detection system for sandwich structures under cryogenic temperatures. In Proceedings of the SPIE’s 9th Annual International Symposium on Smart Structures and Materials, San Diego, CA, USA, 17–21 March 2002; pp. 97–107. [Google Scholar] [CrossRef]
- Xu, Y.G.; Liu, G.R. A Modified Electro-Mechanical Impedance Model of Piezoelectric Actuator-Sensors for Debonding Detection of Composite Patches. J. Intell. Mater. Syst. Struct. 2002, 13, 389–396. [Google Scholar] [CrossRef]
- Huynh, T.C.; Dang, N.L.; Kim, J.T. Advances and challenges in impedance-based structural health monitoring. Struct. Monitor. Maint. 2017, 4, 301–329. [Google Scholar] [CrossRef]
- Lin, B.; Giurgiutiu, V.; Pollock, P.; Xu, B.; Doane, J. Durability and Survivability of Piezoelectric Wafer Active Sensors on Metallic Structure. AIAA J. 2010, 48, 635–643. [Google Scholar] [CrossRef]
- Chaplya, P.M.; Mitrovic, M.; Carman, G.P.; Straub, F.K. Durability properties of piezoelectric stack actuators under combined electromechanical loading. J. Appl. Phys. 2006, 100, 124111. [Google Scholar] [CrossRef]
- Park, G.; Farrar, C.R.; Rutherford, A.C.; Robertson, A.N. Piezo-Sensor Self-Diagnostics Using Electrical Impedance Measurements. In Proceedings of the 15th International Conference on Adaptive Structures and Technologies, Istanbul, Turkey, 22–23 March 2004. [Google Scholar]
- Ai, D.; Luo, H.; Zhu, H. Diagnosis and validation of damaged piezoelectric sensor in electromechanical impedance technique. J. Intell. Mater. Syst. Struct. 2017, 28, 837–850. [Google Scholar] [CrossRef]















| Electrical Parameters | Mechanical Parameters | Constants and Couplants |
|---|---|---|
| , applied electric potential | , material tensor stress | , third-rank tensor |
| , particle displacements | , material tensor strain | , permittivity for constant strain |
| , elastic stiffness tensor for constant electric field |
| S/N | Transducer Series | Remarks of Merit |
|---|---|---|
| 1 | High resolution (HR) Series |
|
| 2 | General purpose(GP) Series |
|
| 3 | High gain (HG) series |
|
| Compensation Method | Temperature Range | Maximum Compensation Interval | Reference Signal Interval |
|---|---|---|---|
| BSS | 5–40 °C | 5 °C | 0.1 °C |
| OBS | 22–32 °C | 10 °C | 0.1 °C |
| BSS + OBS | 21.5–31.5 °C | 10 °C | 0.5 °C |
| Name | Aluminium Small Artificial Damage | Aluminium Crack | CFRP BVID |
|---|---|---|---|
| BSS | = 3 °C | = 15 °C | = 8 °C |
| MBSS | = 13 °C | = 23 °C | = 28 °C |
| Terms | Definition |
|---|---|
| Complex young modulus of the PZT at zero electric field | |
| PZT coupling constant in 1-direction | |
| Complex dielectric at zero electric field | |
| Electrical impedance of the PZT | |
| Structural mechanical impedance of the target structure | |
| Width of the PZT | |
| Length of the PZT | |
| Thickness of the PZT | |
| Damping coefficient of the structure | |
| Angular frequency of the excitation voltage applied on the PZT | |
| m | Mass of the target structure |
| The angular natural frequency of the target structure | |
| Dynamic stiffness of the 2-DOF | |
| Structural mechanical impedance of the interface-target structure |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Olisa, S.C.; Khan, M.A.; Starr, A. Review of Current Guided Wave Ultrasonic Testing (GWUT) Limitations and Future Directions. Sensors 2021, 21, 811. https://doi.org/10.3390/s21030811
Olisa SC, Khan MA, Starr A. Review of Current Guided Wave Ultrasonic Testing (GWUT) Limitations and Future Directions. Sensors. 2021; 21(3):811. https://doi.org/10.3390/s21030811
Chicago/Turabian StyleOlisa, Samuel Chukwuemeka, Muhammad A. Khan, and Andrew Starr. 2021. "Review of Current Guided Wave Ultrasonic Testing (GWUT) Limitations and Future Directions" Sensors 21, no. 3: 811. https://doi.org/10.3390/s21030811
APA StyleOlisa, S. C., Khan, M. A., & Starr, A. (2021). Review of Current Guided Wave Ultrasonic Testing (GWUT) Limitations and Future Directions. Sensors, 21(3), 811. https://doi.org/10.3390/s21030811