
Intelligent Control Method of Hoisting Prefabricated Components Based on Internet-of-Things


Abstract
:1. Introduction
2. Literature Review
2.1. IoT Analysis
2.2. IMU Application Analysis
2.3. Research Emphasis and Novelty
3. Proposed Method
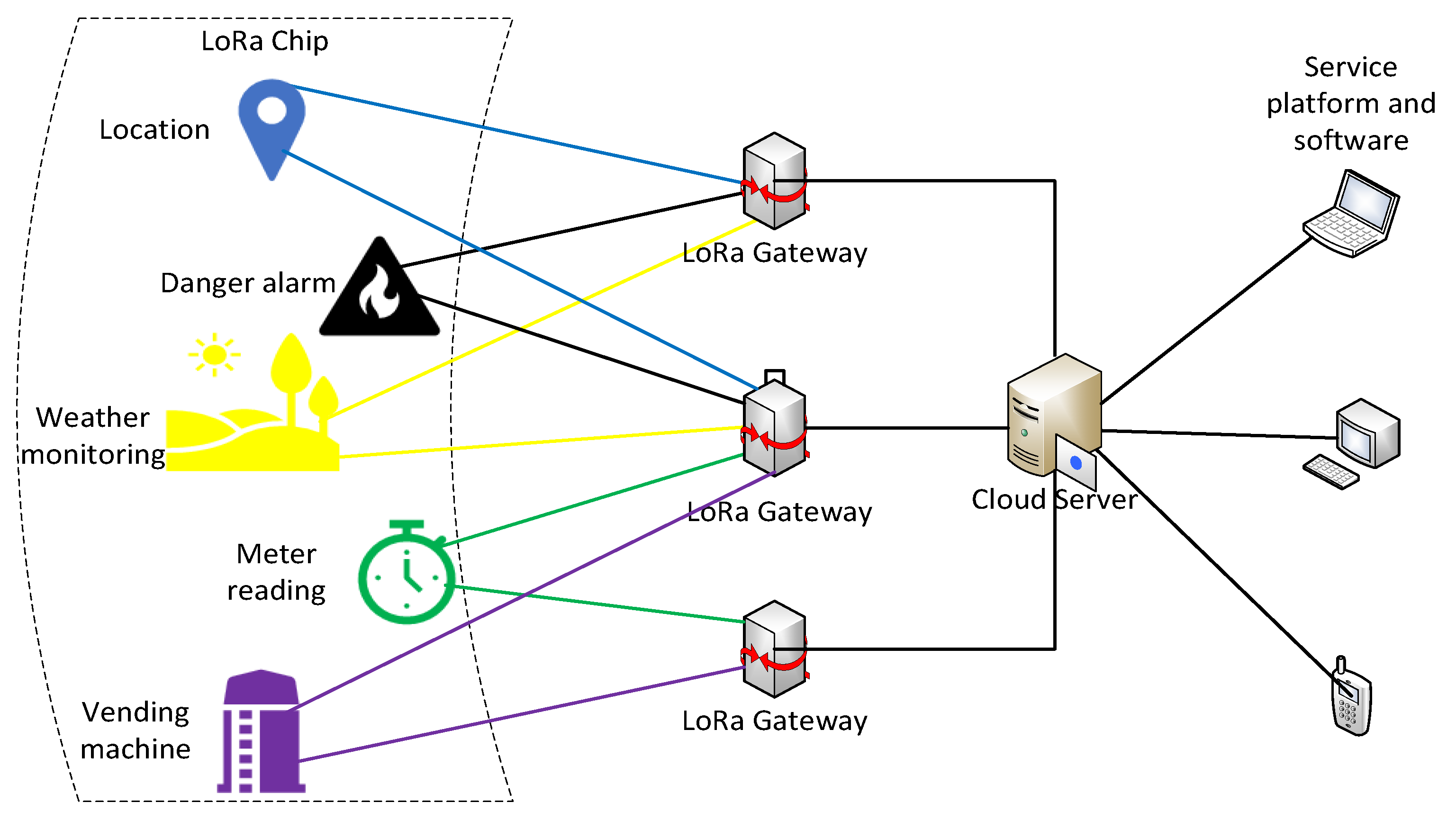
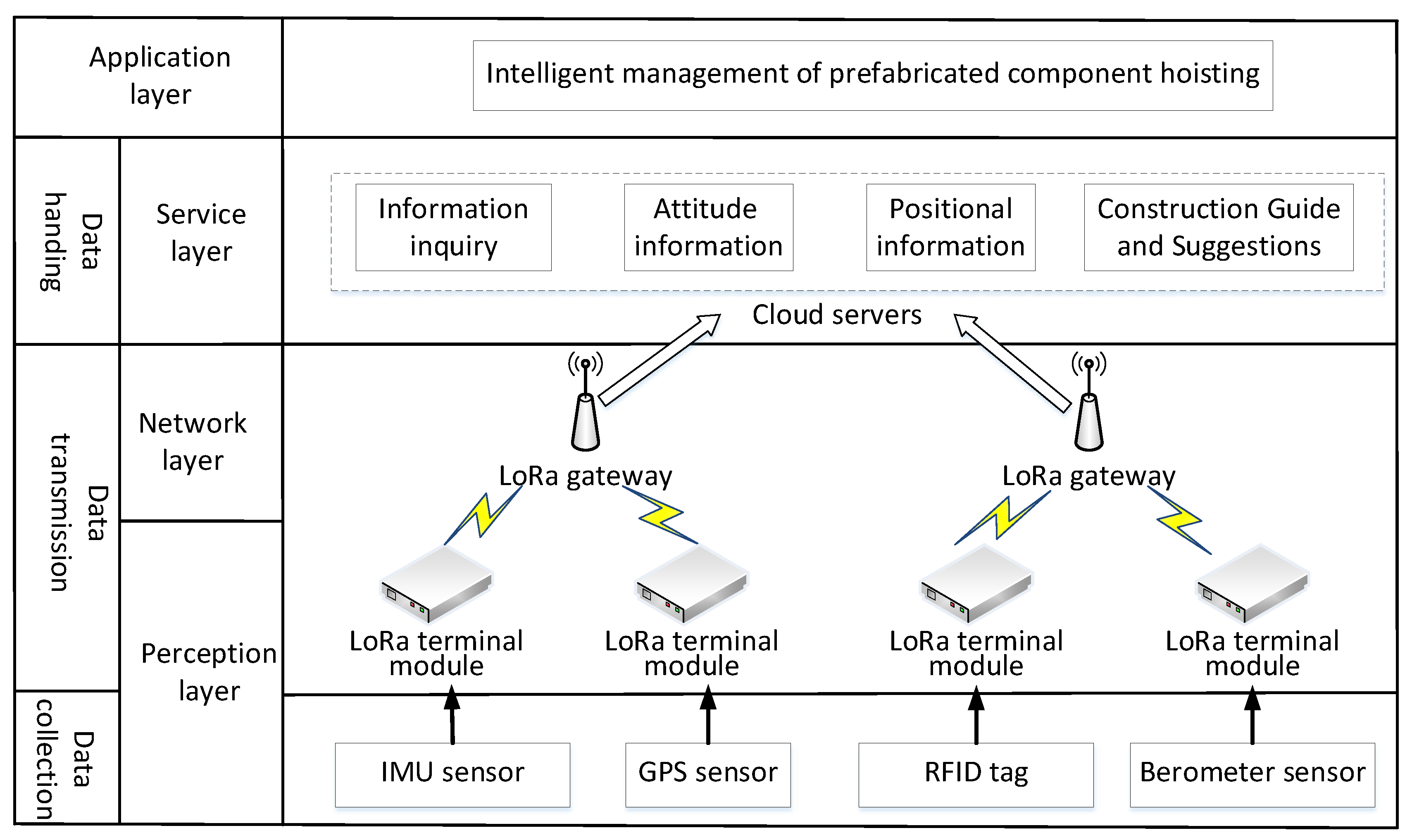
3.1. LoRaWAN Architecture for Hoisting
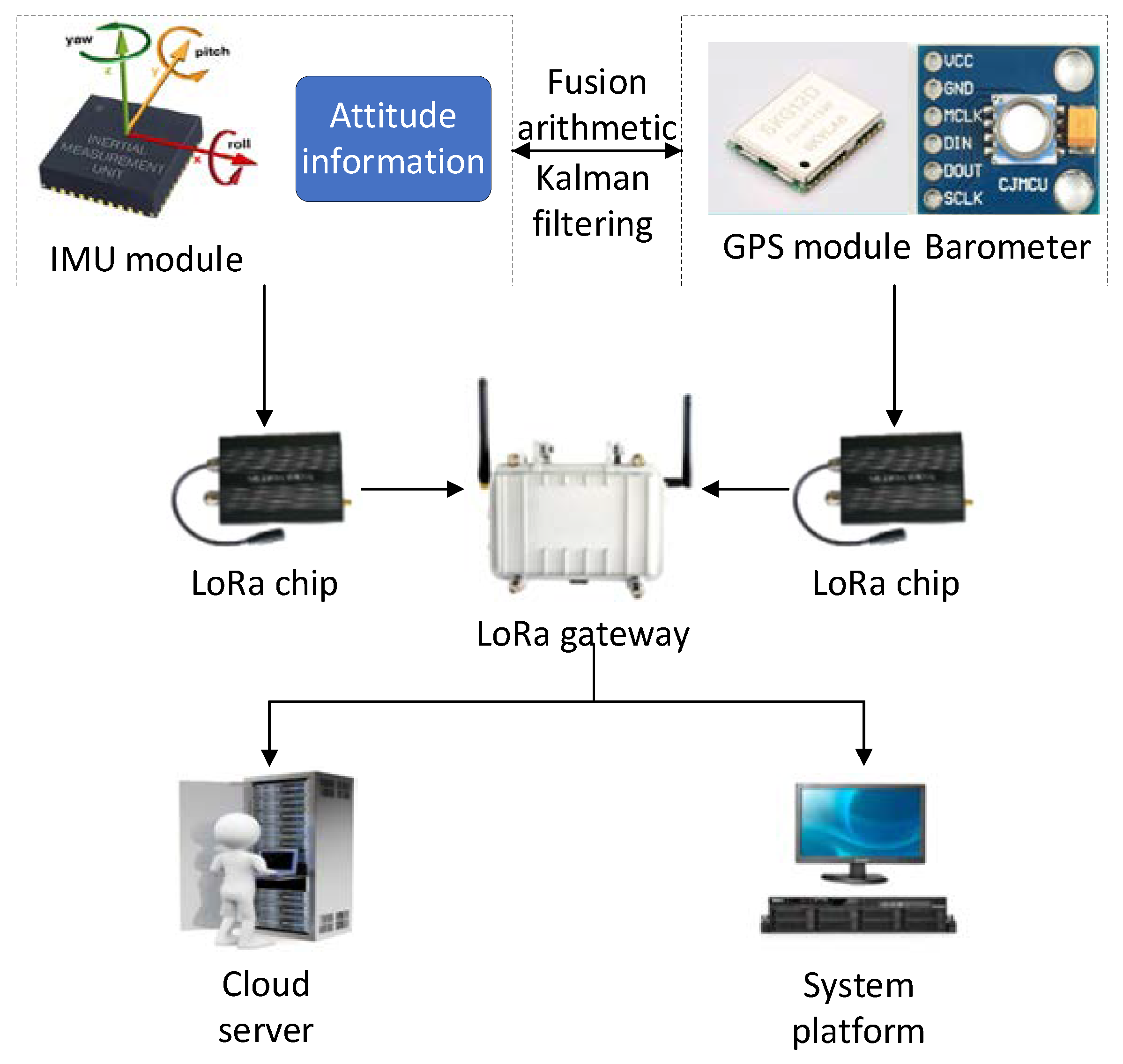
3.2. IMU Information Collection
3.3. Sensors Date Fusion Processing
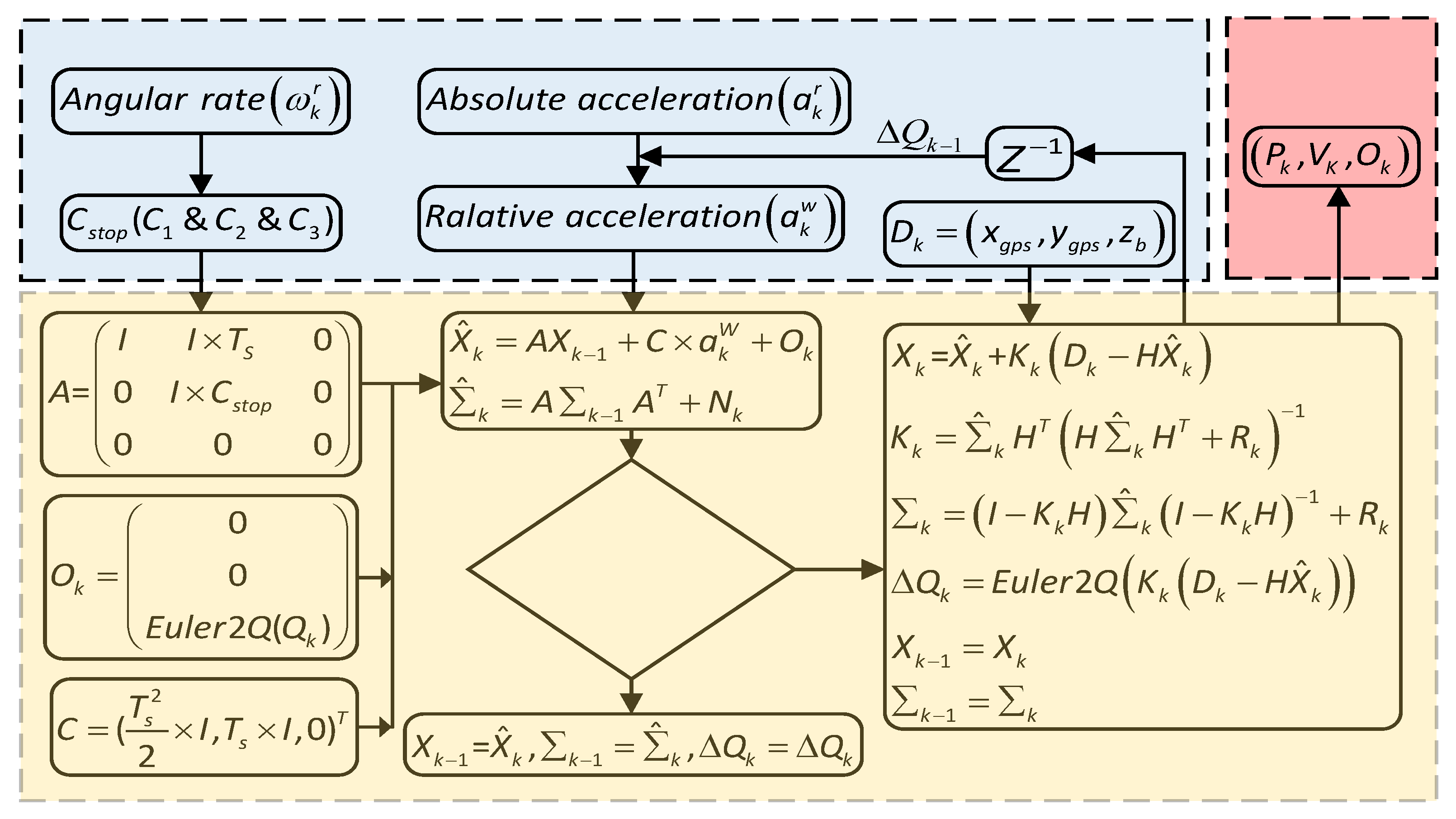
3.3.1. IMU Positioning Algorithm
3.3.2. Zero-Velocity Stage Judgment
3.3.3. Fusion Positioning
4. Case Study of the Proposed Method
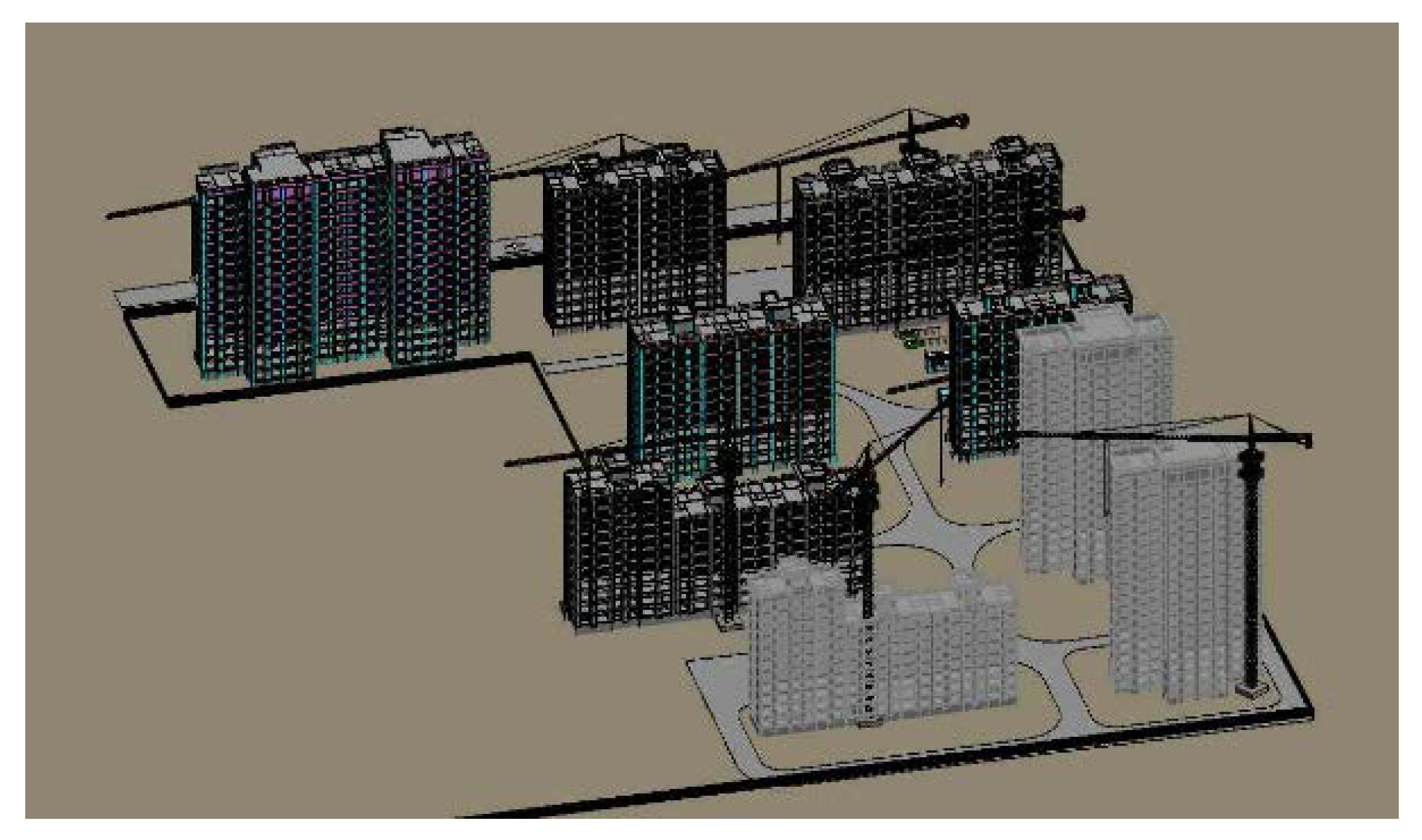
4.1. Case Background and Scenario Simulation
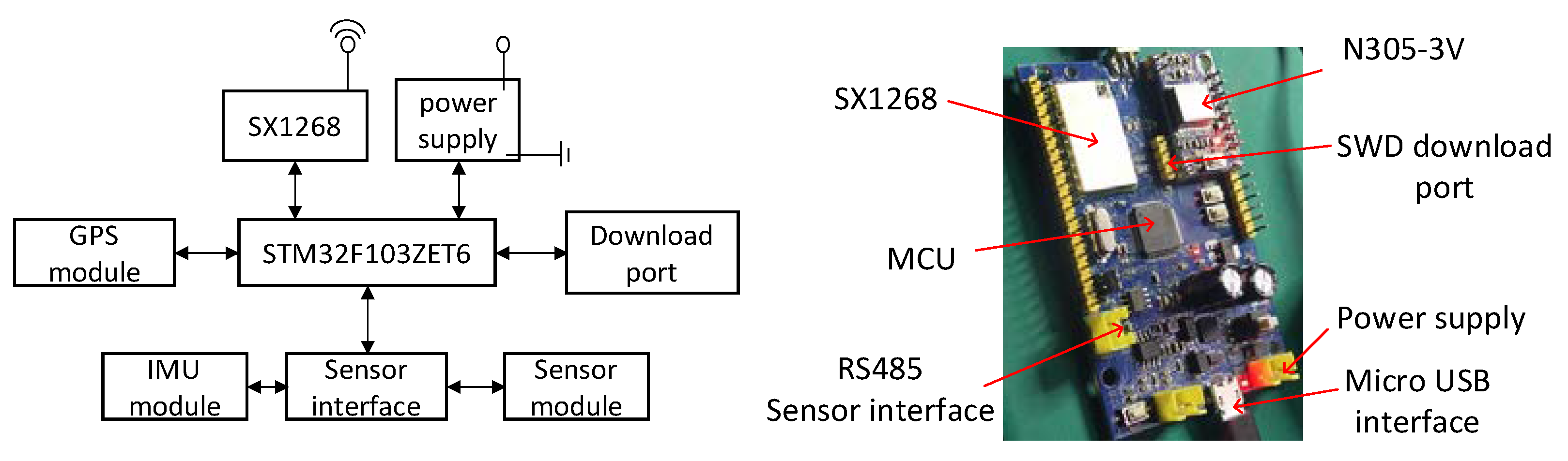
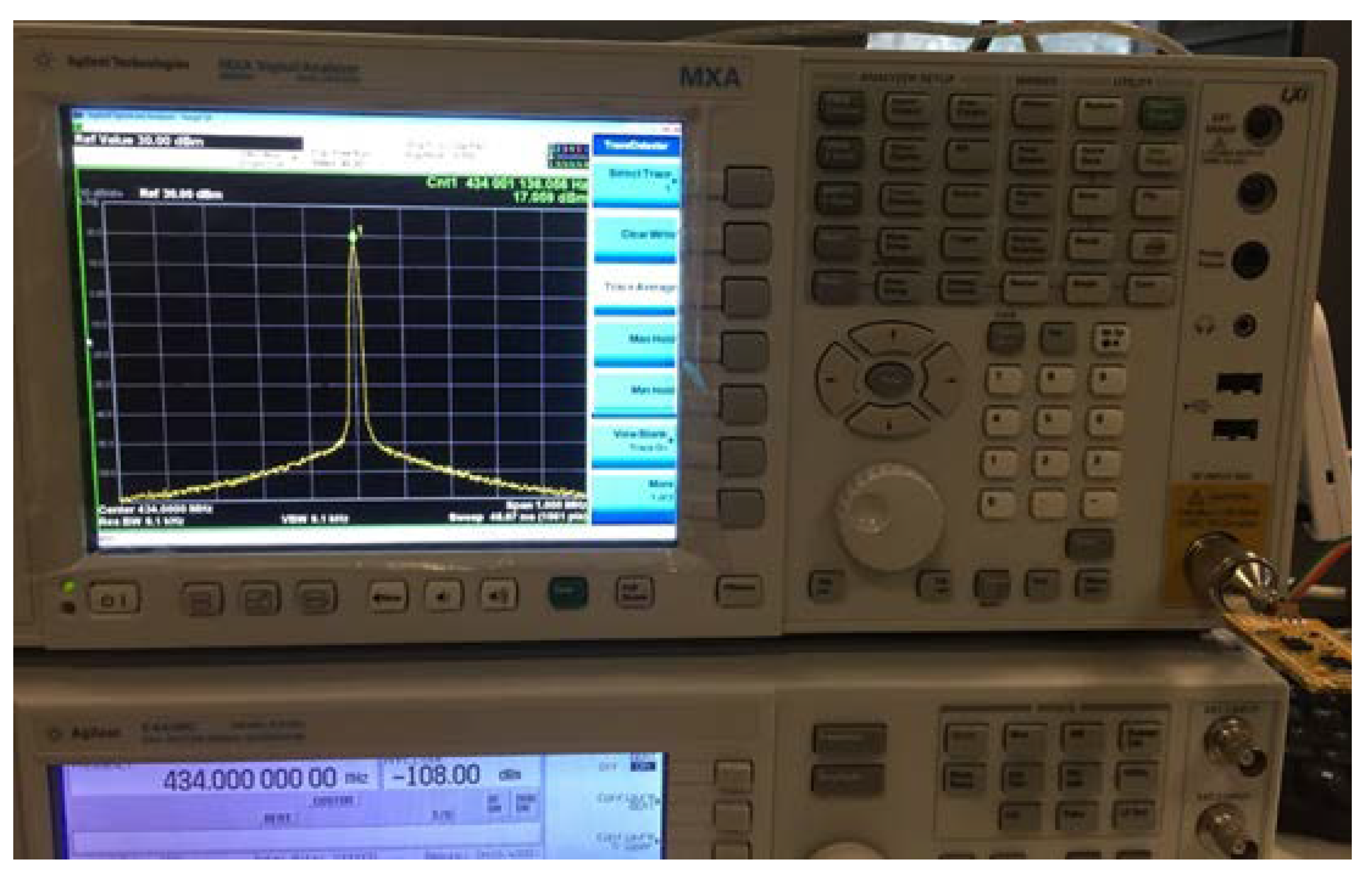
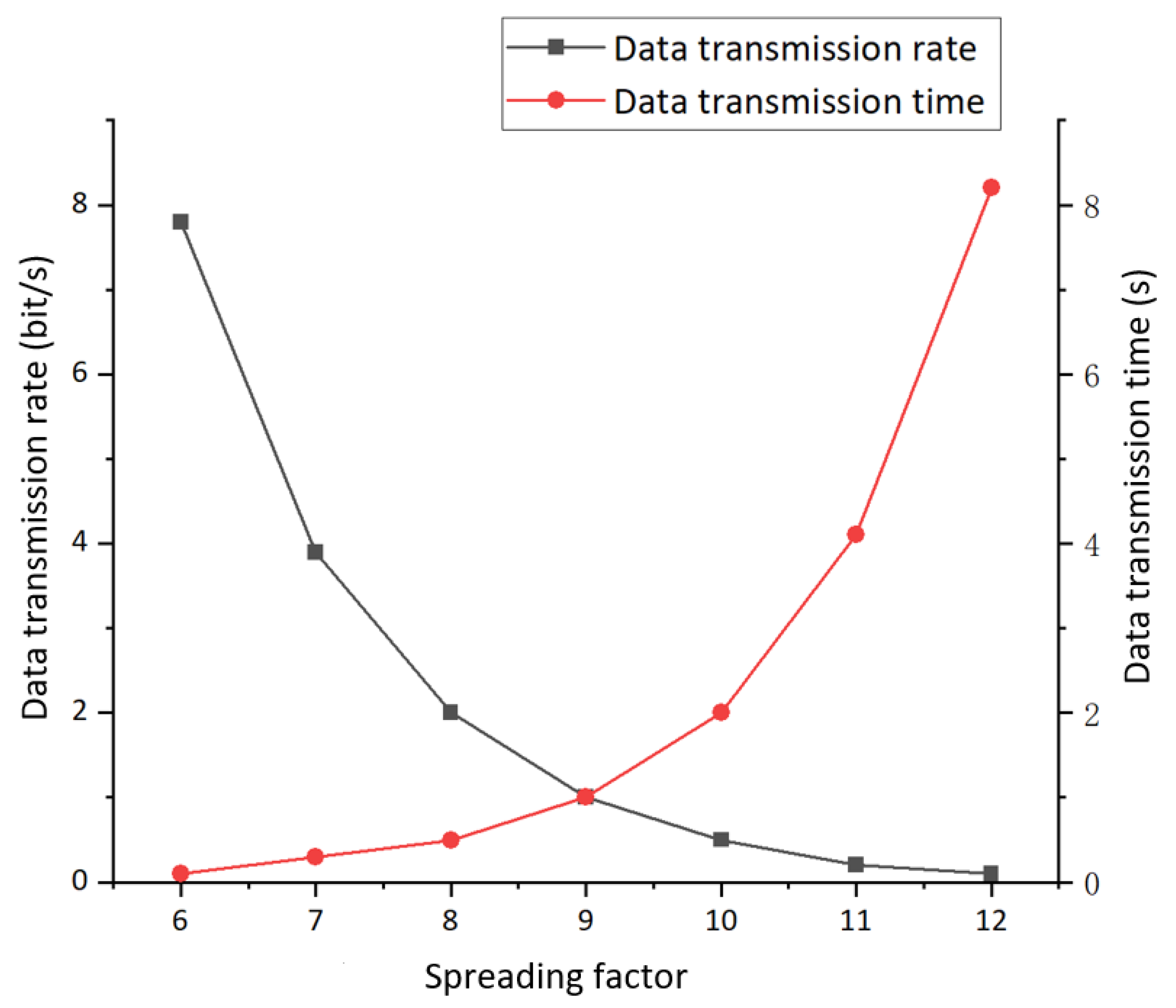
4.2. Hardware Selection and Development
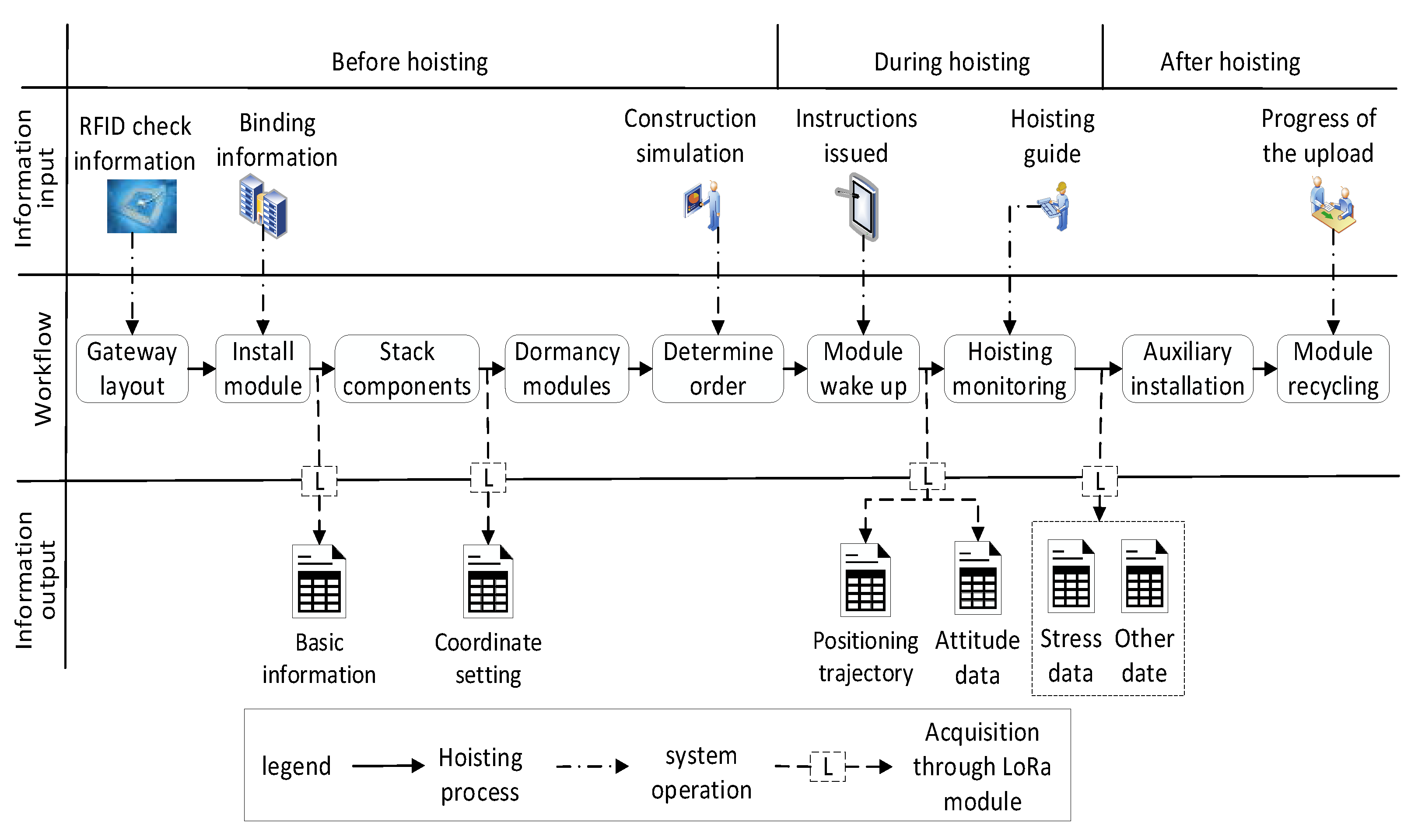
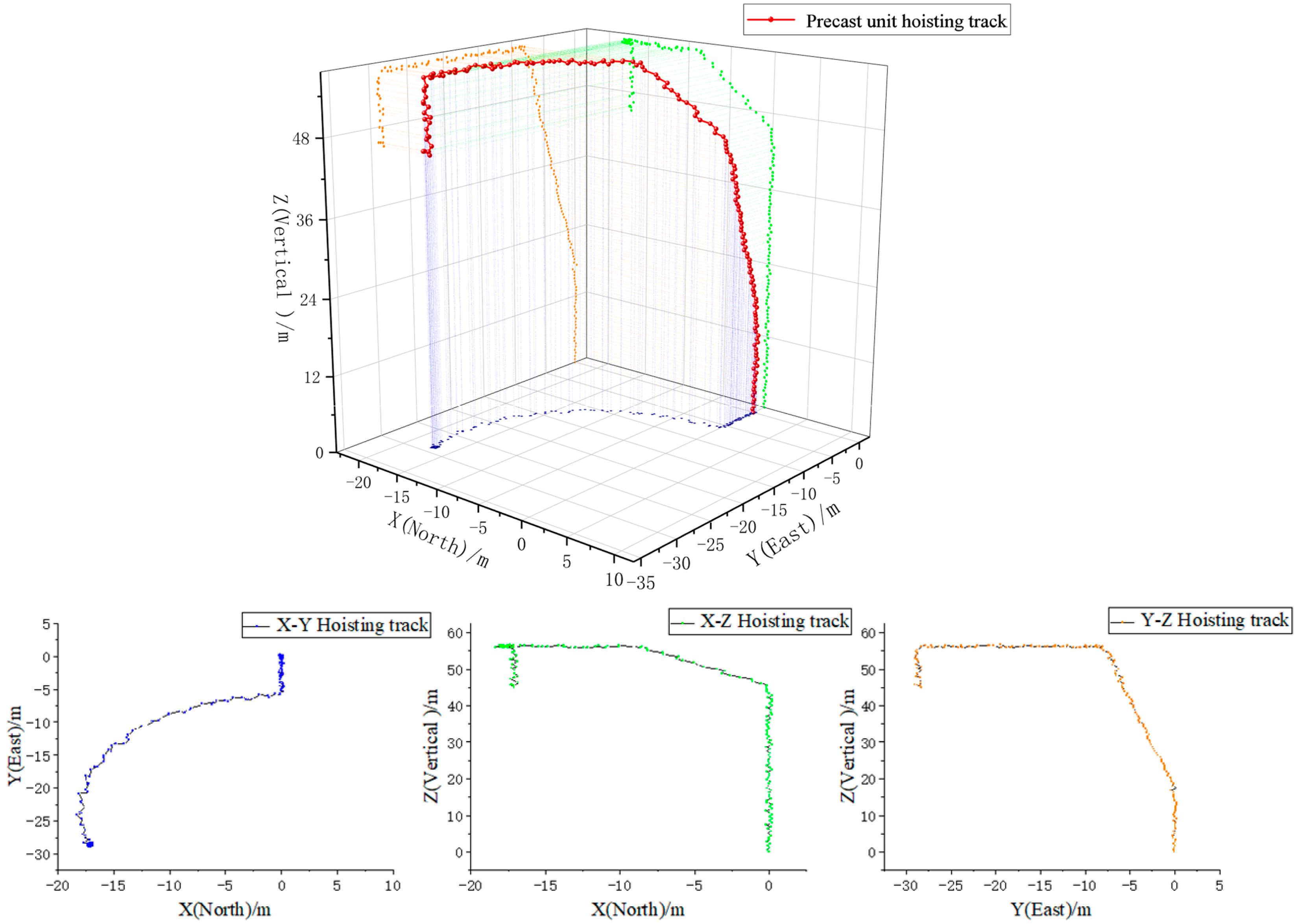
4.3. Analysis of the Hoisting Process
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Arashpour, M.; Wakefield, R.; Blismas, N.; Minas, J. Optimization of process integration and multi-skilled resource utilization in off-site construction. Autom. Constr. 2015, 50, 72–80. [Google Scholar] [CrossRef]
- Shin, I.J. Factors that affect safety of tower crane installation/dismantling in construction industry. Saf. Sci. 2015, 72, 379–390. [Google Scholar] [CrossRef]
- Zhou, W.; Zhao, T.; Wen, L.; Tang, J. Tower crane safety on construction sites: A complex sociotechnical system perspective. Saf. Sci. 2018, 109, 95–108. [Google Scholar] [CrossRef]
- Ko, H.S.; Azambuja, M.; Lee, H.F. Cloud-based Materials Tracking System Prototype Integrated with Radio Frequency Identification Tagging Technology. Autom. Constr. 2016, 63, 144–154. [Google Scholar] [CrossRef]
- Dave, B.; Kubler, S.; Främling, K.; Koskela, L. Opportunities for enhanced lean construction management using Internet of Things standards. Autom. Constr. 2015, 61, 86–97. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.T.; Wang, S.L.; Song, X.N.; Han, Y.L. IoT-Based Intelligent Construction System for Prefabricated Buildings: Study of Operating Mechanism and Implementation in China. Appl. Sci. 2020, 10, 6311. [Google Scholar] [CrossRef]
- Ma, Z.L.; Li, S.Y. New Model of Project Management under the “Internet +” environment. J. Tongji Univ. (Nat. Sci.) 2018, 46, 135–139. (In Chinese) [Google Scholar]
- Ma, Z.L.; Cai, S.Y.; Mao, N.; Yang, Q.L.; Feng, J.G.; Wang, P.Y. Construction quality management based on a collaborative system using BIM and indoor positioning. Autom. Constr. 2018, 92, 35–45. [Google Scholar] [CrossRef]
- Zhao, L.L.; Liu, Z.S.; Jasper, M. Development of Intelligent Prefabs Using IoT Technology to Improve the Performance of Prefabricated Construction Projects. Sensors 2019, 19, 4131. [Google Scholar] [CrossRef] [Green Version]
- Xu, G.; Li, M.; Chen, C.H.; Wei, Y. Cloud asset-enabled integrated IoT platform for lean prefabricated construction. Autom. Constr. 2018, 93, 123–134. [Google Scholar] [CrossRef]
- Knoll, M.; Breitegger, P.; Bergmann, A. Low-Power Wide-Area technologies as building block for smart sensors in air quality measurements. Elektrotechnik Inf. 2018, 135, 416–422. [Google Scholar] [CrossRef]
- Muthanna, M.S.A.; Muthanna, M.A.M.; Khakimov, A.; Ammar, M. Development of intelligent street lighting services model based on LoRa technology. In Proceedings of the 2018 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus), St. Petersburg, Russia, 29 January–1 February 2018; pp. 90–93. [Google Scholar]
- Catherwood, P.A.; Steele, D.; Little, M.; Mclaughlin, J. A Community-based IoT Personalized Wireless Healthcare Solution Trial. IEEE J. Transl. Eng. Health Med. 2018, 6, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Polonelli, T.; Brunelli, D.; Guermandi, M.; Benini, L. An accurate low-cost Crackmeter with LoRaWAN communication and energy harvesting capability. In Proceedings of the 2018 IEEE 23rd International Conference on Emerging Technologies and Factory Automation (ETFA), Funchal, Portugal, 14 May 2018; pp. 671–676. [Google Scholar]
- Liu, S.N.; Liu, Z.S.; Zhao, Y.H.; Wang, W.S.; Zhao, X.F. Application Scheme of NB-IoT Technology in Assembly Building Construction Management. J. Civ. Eng. Manag. 2019, 36, 178–184. (In Chinese) [Google Scholar]
- Drenoyanis, A.; Raad, R.; Wady, I.; Krogh, C. Implementation of an IoT Based Radar Sensor Network for Wastewater Management. Sensors 2019, 19, 254. [Google Scholar] [CrossRef] [Green Version]
- Pasolini, G.; Buratti, C.; Feltrin, L.; Castro, C.D.; Verdone, R.; Andrisano, O. Smart City Pilot Projects Using LoRa and IEEE802.15.4 Technologies. Sensors 2018, 18, 1118. [Google Scholar] [CrossRef] [Green Version]
- Kharel, J.; Reda, H.T.; Shin, S.Y. Fog Computing-Based Smart Health Monitoring System Deploying LoRa Wireless Communication. IETE Tech. Rev. 2019, 36, 69–82. [Google Scholar] [CrossRef]
- Xu, L.D.; He, W.; Li, S. Internet of Things in Industries: A Survey. IEEE Trans. Ind. Inform. 2014, 10, 2233–2243. [Google Scholar] [CrossRef]
- Abdelgawad, A.; Yelamarthi, K. Internet of Things (IoT) Platform for Structure Health Monitoring. Wirel. Commun. Mob. Comput. 2017, 2017, 1–10. [Google Scholar] [CrossRef]
- Kochovski, P.; Stankovski, V. Supporting smart construction with dependable edge computing infrastructures and applications. Autom. Constr. 2018, 85, 182–192. [Google Scholar] [CrossRef]
- Wang, H. Is servitization of construction the inevitable choice of Internet Plus construction? Front. Eng. Manag. 2017, 4, 229–230. [Google Scholar] [CrossRef] [Green Version]
- Parri, L.; Parrino, S.; Peruzzi, G.; Pozzebon, A. Low Power Wide Area Networks (LPWAN) at Sea: Performance Analysis of Offshore Data Transmission by Means of LoRaWAN Connectivity for Marine Monitoring Applications. Sensors 2019, 19, 3239. [Google Scholar] [CrossRef] [Green Version]
- Sinha, R.S.; Wei, Y.; Hwang, S.H. A survey on LPWA technology: LoRa and NB-IoT. ICT Express 2017, 3, 14–21. [Google Scholar] [CrossRef]
- Bao, L.; Wei, L.; Jiang, C.; Miao, W.; Guo, B.; Li, W.; Cheng, X.; Liu, R.; Zou, J. Coverage Analysis on NB-IoT and LoRa in Power Wireless Private Network. Procedia Comput. Sci. 2018, 131, 1032–1038. [Google Scholar] [CrossRef]
- Baszczyszyn, B.; Mühlethaler, P. Analyzing LoRa long-range, low-power, wide-area networks using stochastic geometry. In Proceedings of the 12th EAI International Conference on Performance Evaluation Methodologies and Tools, Palma de Mallorca, Spain, 13–15 March 2019. [Google Scholar]
- Benkahla, N.; Tounsi, H.; Song, Y.Q.; Frikha, M. Review and experimental evaluation of ADR enhancements for LoRaWAN networks. Telecommun. Syst. 2020, 1–22. [Google Scholar] [CrossRef]
- Gebre-Egziabher, D.; Hayward, R.C.; Powell, J.D. A low-cost GPS/inertial attitude heading reference system (AHRS) for general aviation applications. In Proceedings of the Position Location and Navigation Symposium, Palm Springs, CA, USA, 20–23 April 1996. [Google Scholar]
- Siavash, H. Deep Kalman Filter: Simultaneous Multi-Sensor Integration and Modelling; A GNSS/IMU Case Study. Sensors 2018, 18, 1316. [Google Scholar]
- Chen, L.; Hu, H. IMU/GPS based pedestrian localization. In Proceedings of the Computer Science and Electronic Engineering Conference, Colchester, UK, 12–13 September 2012. [Google Scholar]
- Narasimhappa, M.; Mahindrakar, A.D.; Guizilini, V.C.; Terra, M.H. MEMS-Based IMU Drift Minimization: Sage Husa Adaptive Robust Kalman Filtering. IEEE Sens. J. 2019, 20, 250–260. [Google Scholar] [CrossRef]
- Jiménez, A.R.; Seco, F.; Prieto, J.C.; Guevara, J.A. Indoor pedestrian navigation using an INS/EKF framework for yaw drift reduction and a foot-mounted iIMU. In Proceedings of the Positioning Navigation and Communication (WPNC), Dresden Germany, 11–12 March 2010; pp. 135–143. [Google Scholar]
- Fan, J.B.; Sun, J.; Fan, H.H.; Chen, W. A Method of Autonomous Localization Based on Magnetometer, IMU and Monocular Vision. Aerosp. Syst. Eng. Technol. 2019, 3, 39–45. [Google Scholar]
- Sun, C.K.; Xu, H.Y.; Zhang, B.S.; Wang, P.; Guo, X.T. Hybrid Pose Measurement Based on Fusion of IMU and Monocular Vision. J. Tianjin Univ. (Sci. Technol.) 2017, 50, 313–320. (In Chinese) [Google Scholar]
- He, X.; Chen, Y.; Liu, J. Development of a low-cost integrated GPS/IMU system. IEEE Aerosp. Electron. Syst. Mag. 1998, 13, 7–10. [Google Scholar]
- Guo, D.H.; Wu, L.X.; Wang, J.C.; Zheng, X.W. Use the GPS/IMU New Technology for Photogrammetric Application. In Proceedings of the IEEE International Conference on Geoscience & Remote Sensing Symposium, Denver, CO, USA, 31 July–4 August 2006. [Google Scholar]
- Lee, G.; Kim, H.H.; Lee, C.J.; Ham, S.; Yun, S.H.; Cho, H.; Kim, B.K.; Kim, G.T.; Kim, K. A laser-technology-based lifting-path tracking system for a robotic tower crane. Autom. Constr. 2019, 18, 865–874. [Google Scholar] [CrossRef]
- Goursaud, C.; Gorce, J.M. Dedicated Networks for IoT: PHY/MAC State of the Art and Challenges. EAI Endorsed Trans. Internet Things. 2015, 10, 1–11. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Building Number | Total Floors | Start Layer | End Layer | Assembly Layer | Single Wall Panels | Wallboards Total Number | Number of Single Floor Slab | Number of Single Stairs |
|---|---|---|---|---|---|---|---|---|
| 10 | 15 | 4 | 14 | 11 | 16 | 176 | 96 | 4 |
| 11 | 11 | 4 | 10 | 7 | 4 | 28 | 50 | 4 |
| 12 | 11 | 4 | 10 | 7 | 6 | 42 | 78 | 6 |
| 13 | 11 | 4 | 10 | 7 | 4 | 28 | 52 | 4 |
| 14 | 11 | 4 | 10 | 7 | 8 | 56 | 76 | 4 |
| 15(1) | 11 | 4 | 10 | 7 | 4 | 28 | 38 | 2 |
| 15(2) | 8 | 3 | 7 | 5 | 8 | 40 | 76 | 4 |
| 16 | 18 | 4 | 17 | 14 | 8 | 112 | 46 | 2 |
| 17 | 18 | 4 | 17 | 14 | 8 | 112 | 46 | 2 |
| 18(1) | 11 | 4 | 10 | 7 | 2 | 14 | 26 | 2 |
| 18(2) | 8 | 3 | 7 | 5 | 4 | 20 | 52 | 4 |
| Hardware Types | Module Selection | Introduction of Module |
|---|---|---|
| Lora chip | Semtech SX1268 | Semtech’s new long-range, low-power sub-GHz wireless transceiver chip |
| MCU | STM32F103ZET6 | ST company under a commonly used enhanced series of microcontrollers |
| GPS | N305-3V | Professional level dual mode navigation and |
| Barometer | BMP180 | A high-precision, low-power digital pressure sensor for mobile phones, GPS navigation devices. |
| IMU | JY901B | Intelligent attitude information measurement module developed by Witter |
| LoRaWAN Parameter | LoRa Values |
|---|---|
| Channel Bandwidth | 125 to 500 kHz |
| Uplink data rate | 29–50 kbps |
| Downlink data rate | 7–50 kbps |
| Spreading factor | 27to 212 |
| Link budget | BMP180156 dB |
| Doppler sensitivity | Up to 40 ppm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Cao, C.; Liu, Z.; Mu, E. Intelligent Control Method of Hoisting Prefabricated Components Based on Internet-of-Things. Sensors 2021, 21, 980. https://doi.org/10.3390/s21030980
Zhao Y, Cao C, Liu Z, Mu E. Intelligent Control Method of Hoisting Prefabricated Components Based on Internet-of-Things. Sensors. 2021; 21(3):980. https://doi.org/10.3390/s21030980
Chicago/Turabian StyleZhao, Yuhong, Cunfa Cao, Zhansheng Liu, and Enyi Mu. 2021. "Intelligent Control Method of Hoisting Prefabricated Components Based on Internet-of-Things" Sensors 21, no. 3: 980. https://doi.org/10.3390/s21030980
APA StyleZhao, Y., Cao, C., Liu, Z., & Mu, E. (2021). Intelligent Control Method of Hoisting Prefabricated Components Based on Internet-of-Things. Sensors, 21(3), 980. https://doi.org/10.3390/s21030980