
A Comparative Analysis of Aerosol Optical Coefficients and Their Associated Errors Retrieved from Pure-Rotational and Vibro-Rotational Raman Lidar Signals

 ,
,  ,
,  , , and
, , and 
Abstract
:1. Introduction
2. Materials and Methods
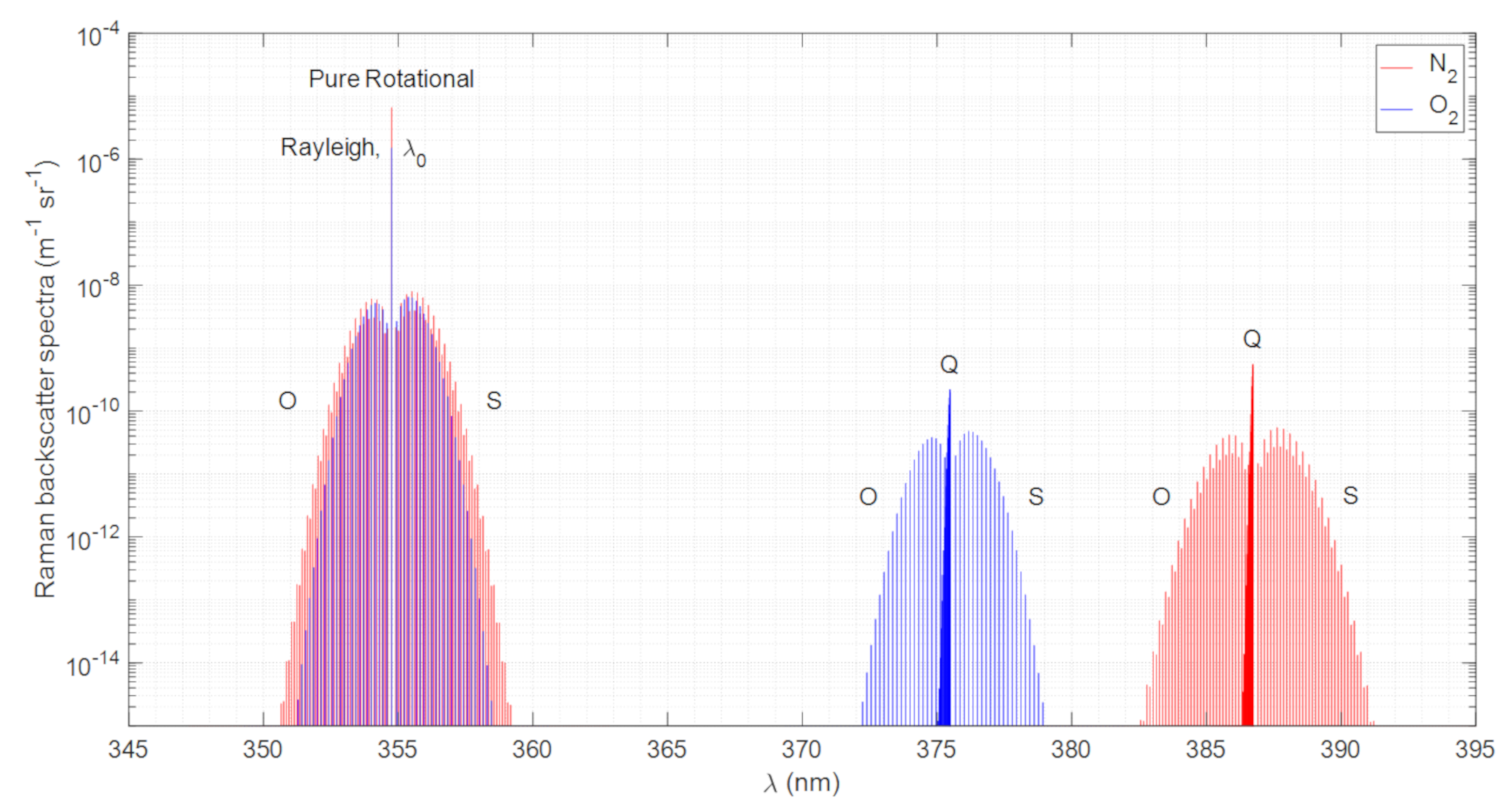
2.1. Pure Rotational and Vibro-Rotational Raman Spectra Calculation for N2 and O2
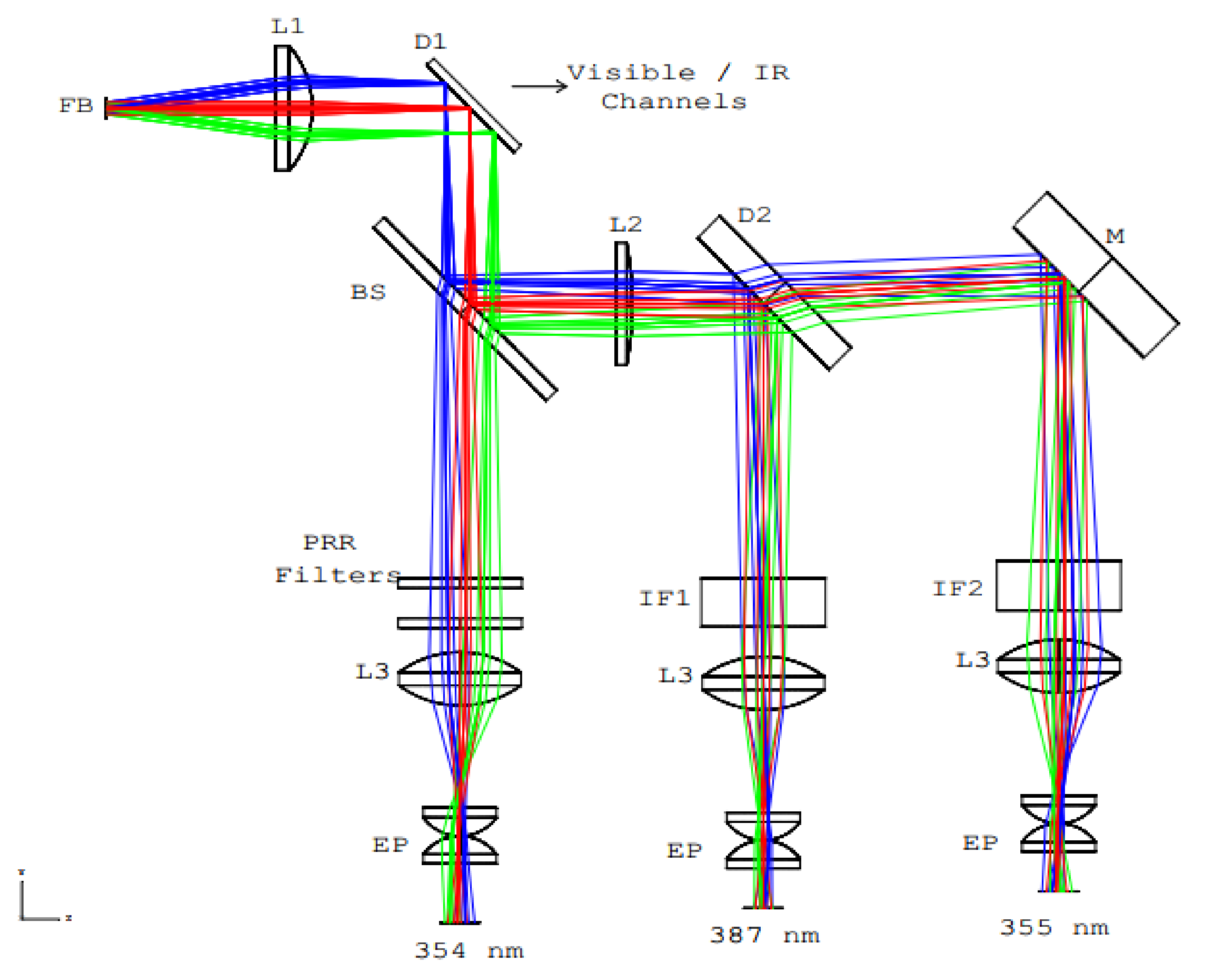
2.2. Optical Design and PRR Spectral Filtering
2.3. PRR vs. VRR Channel Numerical Comparison
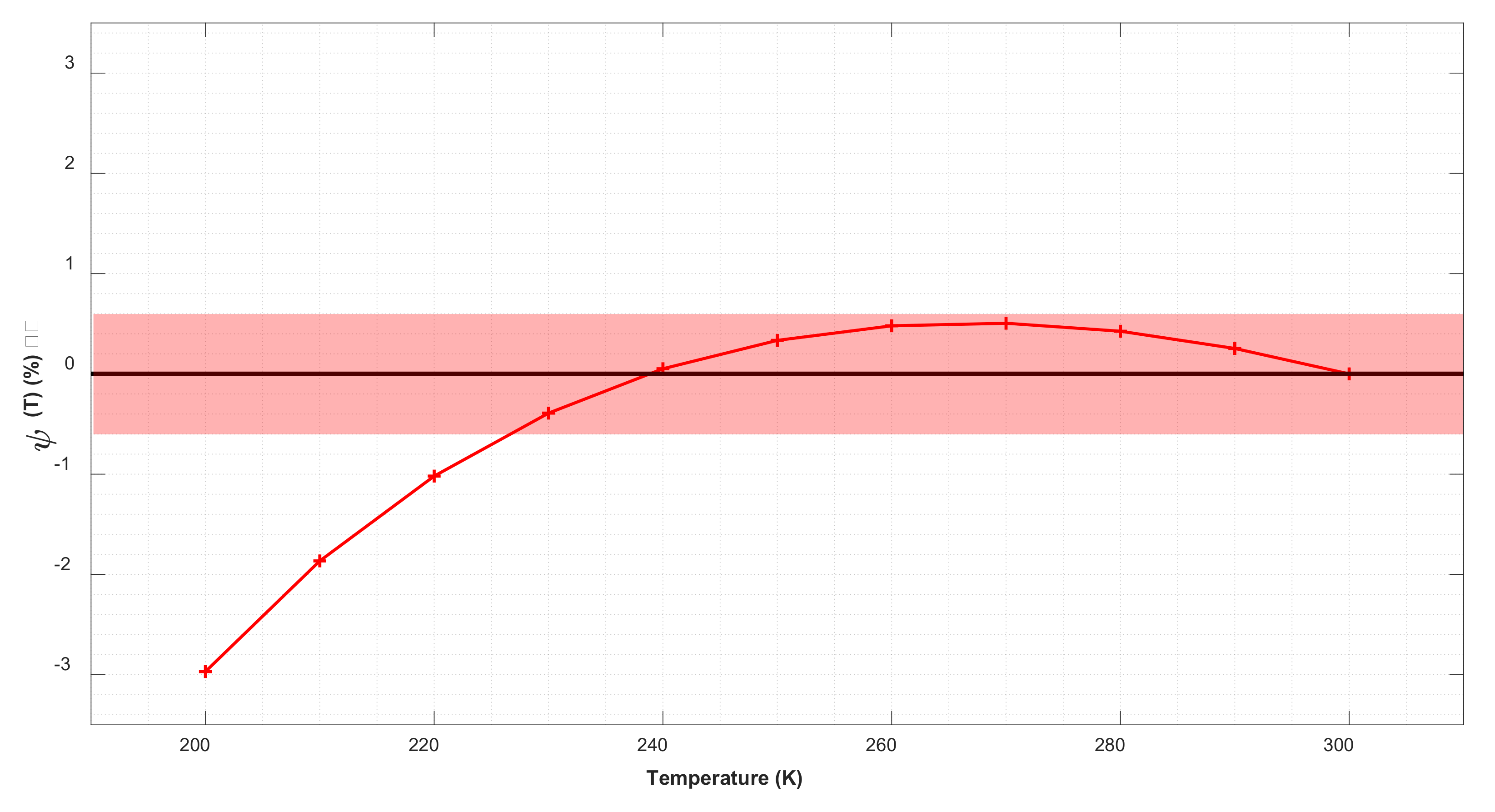
2.4. Temperature Analysis of the Effective Differential Cross-Section (PRR)
3. Results
3.1. PRR vs. VRR: Signal and Signal-to-Noise Ratio Comparisons
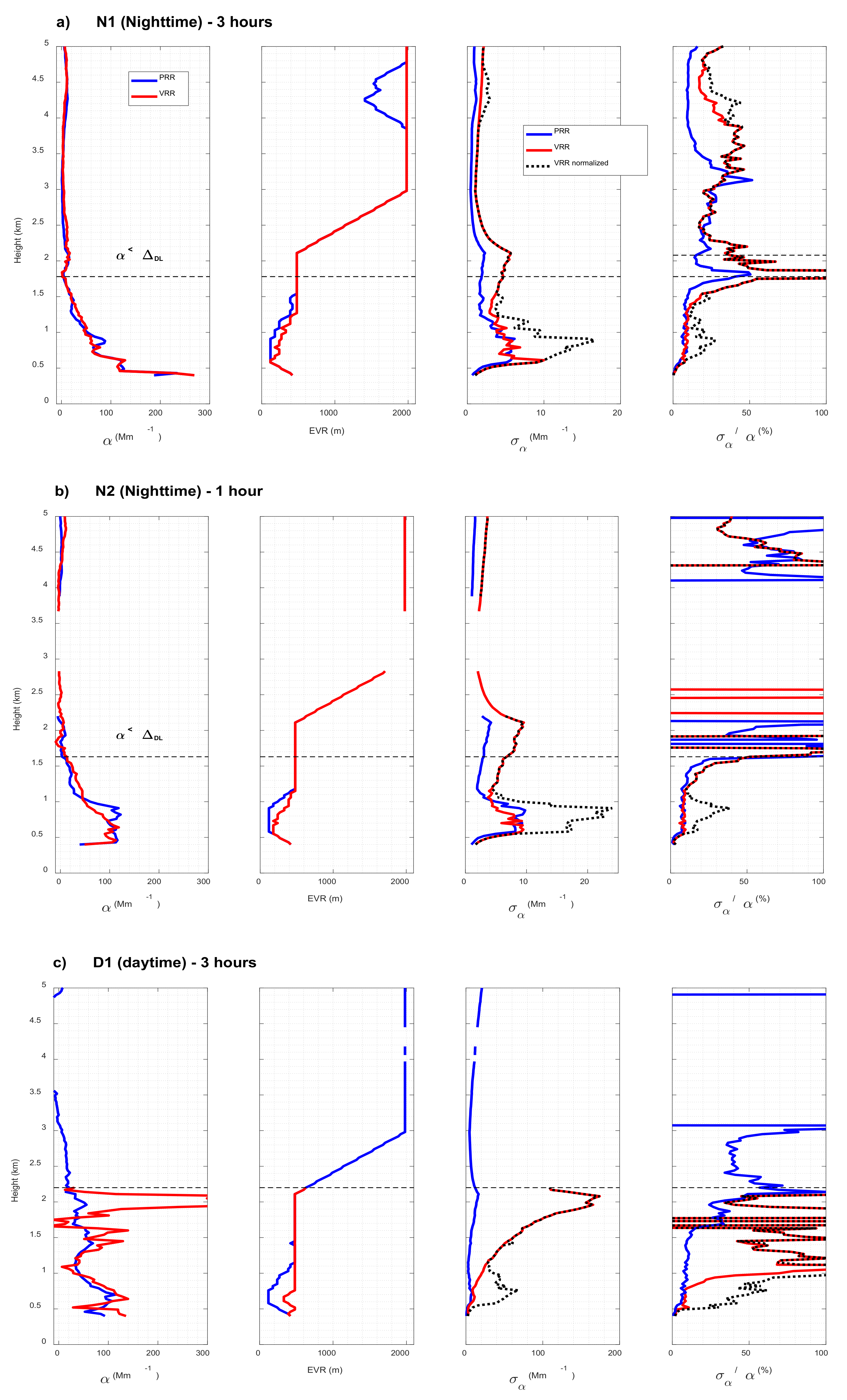
3.2. PRR vs. VRR: Optical Product Estimation and Comparison of Performances
- wavelengths set to 355 (elastic) and 387 nm (VRR),
- extinction Ångström exponent is set to 1.0,
- low and high range error thresholds are set to, respectively, 10 and 10% (nighttime) and 10 and 50% (daytime),
- detection limits for the backscatter coefficient to 0.1 Mm−1 sr−1 and extinction to 5 Mm−1,
- height range in which ELDA looks for a suitable calibration interval to 4–8 km.
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Pure Rotational and Vibro-Rotational Raman Differential Backscattering Cross-Section of N2 and O2 Calculation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| gN | IN | |
|---|---|---|
| N2 | 6 for J even; 3 for J odd | 1 |
| O2 | 0 for J even; 1 for J odd | 0 |
| B1 [m−1] | B0 [m−1] | D0 [m−1] | |
|---|---|---|---|
| N2 | 197.219 | 198.957 | 5.76 × 10−4 |
| O2 | 142.188 | 143.768 | 4.85 × 10−4 |
| a2 [m6/(4πε0)2] | γ2 [m6/(4πε0)2] | a′2 [(4πε0)2 m2/kg] | γ′2 [(4πε0)2 m2/kg] | |
|---|---|---|---|---|
| N2 | 3.17 × 10−60 | 0.52 × 10−60 | 2.62 × 10−14 | 4.23 × 10−14 |
| O2 | 2.66 × 10-60 | 1.26 × 10−60 | 1.63 × 10−14 | 6.46 × 10−14 |
References
- Comerón, A.; Muñoz-Porcar, C.; Rocadenbosch, F.; Rodríguez-Gómez, A.; Sicard, M. Current research in lidar technology used for the remote sensing of atmospheric aerosols. Sensors 2017, 17, 1450. [Google Scholar] [CrossRef] [Green Version]
- Ansmann, A.; Riebesell, M.; Weitkamp, C. Measurement of atmospheric aerosol extinction profiles with a Raman lidar. Opt. Lett. 1990, 15, 746. [Google Scholar] [CrossRef] [PubMed]
- Ansmann, A.; Riebesell, M.; Wandinger, U.; Weitkamp, C.; Voss, E.; Lahmann, W.; Michaelis, W. Combined raman elastic-backscatter LIDAR for vertical profiling of moisture, aerosol extinction, backscatter, and LIDAR ratio. Appl. Phys. B Photophys. Laser Chem. 1992, 55, 18–28. [Google Scholar] [CrossRef]
- Measures, R.M. Laser Remote Sensing Fundamentals and Applications; Reprint; Krieger Publisher Company: Malabar, FL, USA, 1992. [Google Scholar]
- Kovalev, V.A.; Eichinger, W.E. Elastic Lidar Theory, Práctice and Analysis Methods; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2004. [Google Scholar]
- Ansmann, A.; Müller, D. Lidar and Atmospheric Aerosol Particles. In Lidar. Range-Resolved Optical Remote Sensing of the Atmosphere; Weitkamp, C., Ed.; Springer Series in Optical Sciences; Springer: New York, NY, USA, 2005; Volume 102, pp. 105–141. ISBN 0-387-40075-3. [Google Scholar]
- Veselovskii, I.; Whiteman, D.N.; Korenskiy, M.; Suvorina, A.; Perez-Ramirez, D. Use of rotational Raman measurements in multiwavelength aerosol lidar for evaluation of particle backscattering and extinction. Atmos. Meas. Tech. 2015, 8, 4111–4122. [Google Scholar] [CrossRef] [Green Version]
- Behrendt, A.; Reichardt, J. Atmospheric temperature profiling in the presence of clouds with a pure rotational Raman lidar by use of an interference-filter-based polychromator. Appl. Opt. 2000, 39, 1372. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.; Cha, H. Rotational Raman lidar: Design and performance test of meteorological parameters (aerosol backscattering coefficients and temperature). J. Korean Phys. Soc. 2007, 51, 352–357. [Google Scholar] [CrossRef]
- Achtert, P.; Khaplanov, M.; Khosrawi, F.; Gumbel, J. Pure rotational-Raman channels of the Esrange lidar for temperature and particle extinction measurements in the troposphere and lower stratosphere. Atmos. Meas. Tech. 2013, 6, 91–98. [Google Scholar] [CrossRef] [Green Version]
- Ortiz-Amezcua, P.; Bedoya-Velásquez, A.E.; Benavent-Oltra, J.A.; Pérez-Ramírez, D.; Veselovskii, I.; Castro-Santiago, M.; Bravo-Aranda, J.A.; Guedes, A.; Guerrero-Rascado, J.L.; Alados-Arboledas, L. Implementation of UV rotational Raman channel to improve aerosol retrievals from multiwavelength lidar. Opt. Express 2020, 28, 8156–8168. [Google Scholar] [CrossRef]
- Kumar, D.; Rocadenbosch, F.; Sicard, M.; Comeron, A.; Muñoz, C.; Lange, D.; Tomás, S.; Gregorio, E. Six-channel polychromator design and implementation for the UPC elastic/Raman lidar. In Proceeding of the Lidar Technologies, Techniques, and Measurements for Atmospheric Remote Sensing VII, Prague, Czech Republic, 30 September 2011. [Google Scholar]
- Rodríguez-Gómez, A.; Sicard, M.; Granados-Muñoz, M.J.; Ben Chahed, E.; Muñoz-Porcar, C.; Barragán, R.; Comerón, A.; Rocadenbosch, F.; Vidal, E. An architecture providing depolarization ratio capability for a multi-wavelength raman lidar: Implementation and first measurements. Sensors 2017, 17, 2957. [Google Scholar] [CrossRef] [Green Version]
- Wandinger, U. Raman Lidar. In Lidar. Range-Resolved Optical Remote Sensing of the Atmosphere; Weitkamp, C., Ed.; Springer Series in Optical Sciences; Springer: New York, NY, USA, 2005; Volume 102, pp. 241–271. ISBN 0-387-40075-3. [Google Scholar]
- Liu, F.; Yi, F. Lidar-measured atmospheric N2 vibrational-rotational Raman spectra and consequent temperature retrieval. Opt. Express 2014, 22, 27833. [Google Scholar] [CrossRef]
- Behrendt, A. Temperature Measurements with Lidar. In Lidar. Range-Resolved Optical Remote Sensing of the Atmosphere; Weitkamp, C., Ed.; Springer Series in Optical Sciences; Springer: New York, NY, USA, 2005; Volume 102, pp. 273–305. ISBN 0-387-40075-3. [Google Scholar]
- Inaba, H.; Kobayasi, T. Laser-Raman radar -Laser-Raman scattering methods for remote detection and analysis of atmospheric pollution. Opto-Electronics 1972, 4, 101–123. [Google Scholar] [CrossRef]
- Verdeyen, J.T. Laser Electronics, 3rd ed.; Prentice Hall: Englewood Cliffs, NJ, USA, 1995. [Google Scholar]
- U.S. Standard Atmosphere, 1976; National Oceanic and Atmospheric Administration: Washington, DC, USA, 1976.
- Whiteman, D.N.I. Evaluating the temperature-dependent lidar equations. Appl. Opt. 2003, 42, 2571–2592. [Google Scholar] [CrossRef] [PubMed]
- Haarig, M.; Engelmann, R.; Ansmann, A.; Veselovskii, I.; Whiteman, D.N.; Althausen, D. 1064nm rotational Raman lidar for particle extinction and lidar-ratio profiling: Cirrus case study. Atmos. Meas. Tech. 2016, 9, 4269–4278. [Google Scholar] [CrossRef] [Green Version]
- Md Reba, M.N.; Rocadenbosch, F.; Sicard, M. A straightforward signal-to-noise ratio estimator for elastic/Raman lidar signals. Remote Sens. Clouds Atmos. XI 2006, 6362, 636223. [Google Scholar]
- Liu, Z.; Hunt, W.; Vaughan, M.; Hostetler, C.; McGill, M.; Powell, K.; Winker, D.; Hu, Y. Estimating random errors due to shot noise in backscatter lidar observations. Appl. Opt. 2006, 45, 4437–4447. [Google Scholar] [CrossRef]
- Agishev, R.R.; Comeron, A.; Gross, B.; Moshary, F.; Ahmed, S.; Gilerson, A.; Vlasov, V.A. Application of the method of decomposition of lidar signal-to-noise ratio to the assessment of laser instruments for gaseous pollution detection. Appl. Phys. B Lasers Opt. 2004, 79, 255–264. [Google Scholar] [CrossRef] [Green Version]
- Coleman, T.F.; Li, Y. An Interior Trust Region Approach for Nonlinear Minimization Subject to Bounds. SIAM J. Optim. 1996, 6, 418–445. [Google Scholar] [CrossRef] [Green Version]
- Coleman, T.F.; Li, Y. On the convergence of interior-reflective Newton methods for nonlinear minimization subject to bounds. Math. Program. 1994, 67, 189–224. [Google Scholar] [CrossRef]
- D’Amico, G.; Amodeo, A.; Baars, H.; Binietoglou, I.; Freudenthaler, V.; Mattis, I.; Wandinger, U.; Pappalardo, G. EARLINET Single Calculus Chain-overview on methodology and strategy. Atmos. Meas. Tech. 2015, 8, 4891–4916. [Google Scholar] [CrossRef] [Green Version]
- D’Amico, G.; Amodeo, A.; Mattis, I.; Freudenthaler, V.; Pappalardo, G. EARLINET Single Calculus Chain-Technical-Part 1: Pre-processing of raw lidar data. Atmos. Meas. Tech. 2016, 9, 491–507. [Google Scholar] [CrossRef] [Green Version]
- Mattis, I.; D’Amico, G.; Baars, H.; Amodeo, A.; Madonna, F.; Iarlori, M. EARLINET Single Calculus Chain-Technical-Part 2: Calculation of optical products. Atmos. Meas. Tech. 2016, 9, 3009–3029. [Google Scholar] [CrossRef] [Green Version]
- Melfi, S.H.; Spinhirne, J.D.; Chou, S.-H.; Palm, S.P. Lidar Observations of Vertically Organized Convection in the Planetary Boundary Layer over the Ocean. J. Clim. Appl. Meteorol. 1985, 24, 806–821. [Google Scholar] [CrossRef]
- Sicard, M.; Pérez, C.; Rocadenbosch, F.; Baldasano, J.M.; García-Vizcaino, D. Mixed-layer depth determination in the Barcelona coastal area from regular lidar measurements: Methods, results and limitations. Boundary-Layer Meteorol. 2006, 119, 135–157. [Google Scholar] [CrossRef] [Green Version]
- Taylor, J.R. An Introduction to Error Analysis: The Study of Uncertainties in Physical Measurements. Meas. Sci. Technol. 1998, 51, 57. [Google Scholar] [CrossRef] [Green Version]
- Goodman, L.A. On the Exact Variance of Products. J. Am. Stat. Assoc. 1960, 55, 708–713. [Google Scholar] [CrossRef]
- Murphy, W.F.; Holzer, W.; Bernstein, H.J. Gas Phase Raman Intensities: A Review of “Pre-Laser” Data. Appl. Spectrosc. 1969, 23, 211–218. [Google Scholar] [CrossRef]
- Alms, G.R.; Burnham, A.K.; Flygare, W.H. Measurement of the dispersion in polarizability anisotropies. J. Chem. Phys. 1975, 63, 3321–3326. [Google Scholar] [CrossRef]
- Buldakov, M.A.; Ippolitov, I.I.; Korolev, B.V.; Matrosov, I.I.; Cheglokov, A.E.; Cherepanov, V.N.; Makushkin, Y.S.; Ulenikov, O.N. Vibration rotation Raman spectroscopy of gas media. Spectrochim. Acta Part A Mol. Spectrosc. 1996, 52, 995–1007. [Google Scholar] [CrossRef]
- Long, D.A. The Raman Effect: A Unified Treatment of the Theory of Raman Scattering by Molecules; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2002; Volume 8, ISBN 0471490288. [Google Scholar]
- Inaba, H. Detection of atoms and molecules by Raman scattering and resonance fluorescence. In Laser Monitoring of the Atmosphere; Hinkley, E.D., Ed.; Springer: Berlin/Heidelberg, Germany, 1976; pp. 153–236. [Google Scholar]










| Units | N2 | O2 | |
|---|---|---|---|
| PRR | 10−8 m−1 sr−1 | 12.4423 | 8.0672 |
| VRR | 10−8 m−1 sr−1 | 0.5866 | 0.2178 |
| Element | Acronym | Manufacturer Model | Description |
|---|---|---|---|
| Lens | L1 | Edmund Optics T46-266/T08-058 | UV GFS UV-AR coating, PCX D = 25.4 mm, BFL = 33.03 mm, |
| Dichroic | D1 | CVI LWP-45-RU407/386/355-TU1064/607/532 | Side 1: Ru ≥ 99% @407, 386, 355 nm and Tu ≥ 85% @1064, 607, 532 nm |
| Lens | L2 | Edmund Optics T46-271/T08-007 | UV GFS UV-AR coating, PCX D = 25.4 mm, BFL = 147.82 mm, |
| Beamsplitter | BS | Melles Griot 03BTQ027 | UV GSFS beamsplitter D = 50 mm, Tr = 3 mm |
| Dichroic | D2 | CVI SWP-45-RU407-TU355-PW-1525-UV | Side 1: Ru ≥ 98% @407 nm, Tu ≥ 60% @355 nm, Side 2: AR @ 355 nm |
| Mirror | M | Melles Griot 02MFG017 | Protected aluminum round flat mirror D = 38 mm, T = 10 mm |
| PRR Interference filters | PRR Filters | Alluxa Custom made | CWL: 353.9 nm, FWHM: 0.8 nm |
| VRR Interference filter | IF1 | Barr Custom made | CWL: 386.7 nm, FWHM: 3 nm |
| Elastic Interference filter | IF2 | Barr Custom made | CWL: 354.7 nm, FWHM: 1 nm |
| Lens | L3 | Edmund Optics T46-292/T08-077 | UV GSF UV-AR coating, DCX D = 25.4 mm, BFL = 21.34 mm, CT = 10.9 mm |
| Eyepiece | EP | Edmund Optics | F = 18 mm, d = 15 mm |
| Units | Element | PRR | VRR | |
|---|---|---|---|---|
| EDCS | 10−8 m−1 sr−1 | - | 3.5065 | 0.4252 |
| - | (N2 and O2) | (N2) | ||
| OPL | Fraction | L1 | 0.9 | 0.9 |
| D1 | 0.99 | 0.99 | ||
| BS | 0.5 | 0.5 | ||
| L2 | - | 0.9 | ||
| D2 | - | 0.98 | ||
| L3 | 0.9 | 0.9 | ||
| EP | 0.9 | 0.9 | ||
| OPL | 0.36 | 0.32 | ||
| (EDCS)(OPL) | 10−8 m−1 sr−1 | - | 1.2623 | 0.1360 |
| Veselovskii (2015) | Haarig (2016) | Ortiz (2020) | This Work | |
|---|---|---|---|---|
| λ0 = 532 nm | λ0 = 1604 nm | λ0 = 355 nm | λ0 = 355 nm | |
| ψ(T) | <1 % | <4% | -- | <0.5% |
| Xβ | <1 % | -- | <4% | <1% |
| Δα | <2 Mm−1 | -- | <−1.6 Mm−1 | <1 Mm−1 |
| Δα (%) | <2% | -- | <1.6% | <1% |
| Case | Units | N1 | N2 | D1 |
|---|---|---|---|---|
| Conditions | Nighttime | Nighttime | Daytime | |
| Date | 11/3/2020 | 11/2/2020 | 21/3/2020 | |
| Start time | UT | 18:57 | 18:57 | 12:46 |
| Temporal resolution | Hours | 3 | 1 | 3 |
| Nearest AERONET | ||||
| Time | UT | 17:05 | 17:05 | 12:59 |
| AOD440 | 0.15 | 0.15 | 0.26 | |
| AE440–675 | 1.27 | 1.27 | 0.71 | |
| Probable airmass origin | Local | Local | Local, dust in the FT |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zenteno-Hernández, J.A.; Comerón, A.; Rodríguez-Gómez, A.; Muñoz-Porcar, C.; D’Amico, G.; Sicard, M. A Comparative Analysis of Aerosol Optical Coefficients and Their Associated Errors Retrieved from Pure-Rotational and Vibro-Rotational Raman Lidar Signals. Sensors 2021, 21, 1277. https://doi.org/10.3390/s21041277
Zenteno-Hernández JA, Comerón A, Rodríguez-Gómez A, Muñoz-Porcar C, D’Amico G, Sicard M. A Comparative Analysis of Aerosol Optical Coefficients and Their Associated Errors Retrieved from Pure-Rotational and Vibro-Rotational Raman Lidar Signals. Sensors. 2021; 21(4):1277. https://doi.org/10.3390/s21041277
Chicago/Turabian StyleZenteno-Hernández, José Alex, Adolfo Comerón, Alejandro Rodríguez-Gómez, Constantino Muñoz-Porcar, Giuseppe D’Amico, and Michaël Sicard. 2021. "A Comparative Analysis of Aerosol Optical Coefficients and Their Associated Errors Retrieved from Pure-Rotational and Vibro-Rotational Raman Lidar Signals" Sensors 21, no. 4: 1277. https://doi.org/10.3390/s21041277
APA StyleZenteno-Hernández, J. A., Comerón, A., Rodríguez-Gómez, A., Muñoz-Porcar, C., D’Amico, G., & Sicard, M. (2021). A Comparative Analysis of Aerosol Optical Coefficients and Their Associated Errors Retrieved from Pure-Rotational and Vibro-Rotational Raman Lidar Signals. Sensors, 21(4), 1277. https://doi.org/10.3390/s21041277