1. Introduction
The driving performance of a vehicle is determined by its driving force, which is determined by the engine and strength of the surface on which the vehicle traverses. For vehicles driving on roads, the thrust is determined by the engine of the vehicle, and the road surface provides sufficient strength. For off-road vehicles (e.g., military vehicles, agricultural vehicles, construction equipment, and planetary exploration rovers), the thrust is determined by the strength of the soil, which is generally in a natural state and does not offer sufficient strength. Therefore, understanding the soil strength and its interaction with the driving vehicle is essential for designing off-road vehicles and predicting their performance. The study of the relationship between the performance of off-road vehicles and the soil strength is called terramechanics or vehicle traction mechanics.
Approaches used to study the dynamics of driving devices and soil can generally be divided into experimental and analytical approaches. Experimental methods focus on determining whether the strength of the soil can allow the driving device to produce sufficient momentum while supporting the target vehicle. During World War II, the US Army Waterways Expert Station (WES) developed a cone penetrometer that was used to define the mechanical properties of soil according to a cone index. The cone penetrometer experimentally measures the mechanical properties of soil to predict whether it can support a military vehicle. The shape, size, and test method of a cone penetrometer are specified in ASAE S313.3:1999(R2013) [
1]. The cone penetrometer is small and lightweight; thus, it is convenient to use onsite. However, the measurement values change depending on the operator’s proficiency. In addition, the cone index denotes the relationship between the compression and shear properties; these parameters cannot be separated. Thus, it is inapplicable to the design of driving devices for off-road vehicles, and it has limited applicability for predicting the performance of driving device on new terrain [
2].
The bevameter was developed to compensate for the shortcomings of cone penetrometers and to study the interrelationship between the driving device of a vehicle and the supporting soil. A bevameter is used for measuring the mechanical properties of soil, and it was first presented by Bekker [
3]. A bevameter consists of a pressure–sinkage test device and shear test device. It was developed to measure the mechanical properties of soil by applying load conditions similar to those applied in the case of a driving device with two separate devices. An off-road vehicle applies vertical and shear loads on the soil. The pressure–sinkage test device measures the mechanical properties of soil in the vertical direction based on the correlation between the sinkage and pressure generated by a compressive load. The shear test device measures the horizontal mechanical properties through the correlation between the slip displacement and the shear stress generated by a shear load. In experimental approaches, the cone penetrometer is used to predict the operability of a specific driving device. In analytical approaches, the bevameter is used to predict the driving performance of a driving device. The bevameter most closely represents the interaction between a driving device and soil, but the onsite measurement process is more complex and time-consuming than that of a cone penetrometer [
2,
4]. Thus far, it is still used in research on terramechanics.
To compensate for the shortcomings of bevameter, Wills [
5] developed a semiautomatic bevameter where hydraulic pressure is used to apply an axial load and torque; this allows a single researcher to conduct research with a bevameter. Golob [
6] developed a bevameter that can perform both pressure–sinkage and shear tests with a single hydraulic cylinder and that could store digital data rather than analog data. Wong and Preston-Thomas [
7] developed a bevameter that could be attached to a tractor, which they used to test the mechanical properties of soil covered by snow. They derived an equation for soil that exhibits a hump during the shear test. Okello et al. [
8] confirmed that the traction predicted from the mechanical properties of soil [
3] reasonably match the traction measured in actual tests. Park and Lee [
9] developed an excavator-mounted bevameter to measure the mechanical properties of soil and predict the traction performance of crawler-type vehicles. Bodin [
10,
11] developed a bevameter to measure the mechanical properties of snow and to research military vehicle. Plessis and Yu [
12] used the pressure–sinkage parameter proposed by Bekker [
3] to predict the normal pressure of a vehicle and confirmed similar behavior to that of the actual normal pressure. Massah and Noorolahi [
13] developed a tractor-attached bevameter to measure the mechanical properties of soil with circular, elliptical, and rectangular plates; they confirmed that the shape of the plate affects the measurements. Apfelbeck et al. [
14] varied the height, number, and shear speed of the grouser to identify factors that affect the shear test; their results showed that the shear stress increases with the height of the grouser. They confirmed that the number of grousers and shear speed did not affect the shear stress. Edwards et al. [
15] used a bevameter to measure the mechanical properties of the simulant Fillite (grade 500W-LF) in a test bed for evaluating the drivability of a planetary rover. Mahonen et al. [
16] developed a portable bevameter to measure the mechanical properties of snow; they confirmed that the bevameter can be applied to snow.
The above literature review shows that bevameters have been used for research in various fields. However, in the absence of relevant regulations, bevameters have been produced and tested at the discretion of researchers. For example, the size and shape of the plate in the pressure-sinkage test and the size of the shear ring in the shear test were different in different studies. Reece [
17] reported that a driving vehicle can experience sinkage caused by the vertical load and slip sinkage caused by the horizontal load. Therefore, both sinkage and slip sinkage should be considered for the motion resistance of a vehicle caused by soil subsidence. However, previously developed bevameters cannot measure slip sinkage due to shear; thus, they may underestimate the sinkage of a vehicle.
The mechanical properties of soil are measured with a cone penetrometer and bevameter to predict the thrust, motion resistance, and drivability of a vehicle and evaluate the capability of the vehicle for transport, movement, and operation. Unlike the case for the cone penetrometer, the fabrication and testing methods for the bevameter have not been standardized; thus, it is designed and studied according to researchers’ experience and discretion. In this study, a new bevameter was developed, and experiments were performed to clarify the factors that affect the measurements of the component devices. For the pressure–sinkage test device, different plate sizes were used to evaluate their effect on the measurements. For the shear-test device, instead of hydraulic pressure, normal pressure was applied using a dead load. Hydraulic pressure depends on the displacement and speed. If sinkage occurs during the shear test, there is a possibility that the normal pressure will vary; however, for a dead load, the pressure does not vary, even if the shear test causes sinkage because it is independent of the displacement and speed. Moreover, the weight of the vehicle affecting the soil thrust is determined by the mass of the vehicle independent of the displacement and speed. Therefore, if a dead load is used instead of hydraulic pressure, the interaction between the vehicle and soil can be more accurately simulated.
In addition, a spline was installed between the worm gear and shaft such that the shaft had a degree of freedom in the rotation and axial directions. Therefore, the normal pressure and torque were separated, enabling the sinkage occurring during the shear test to be considered.
2. Materials and Methods
In this study, a bevameter was developed as an attachment to a tractor. It receives hydraulic pressure from the hydraulic unit of the tractor during the pressure–sinkage test. The bevameter conforms to the category 2 three-point hitch standard for attachment to 30–75 kW tractors [
18].
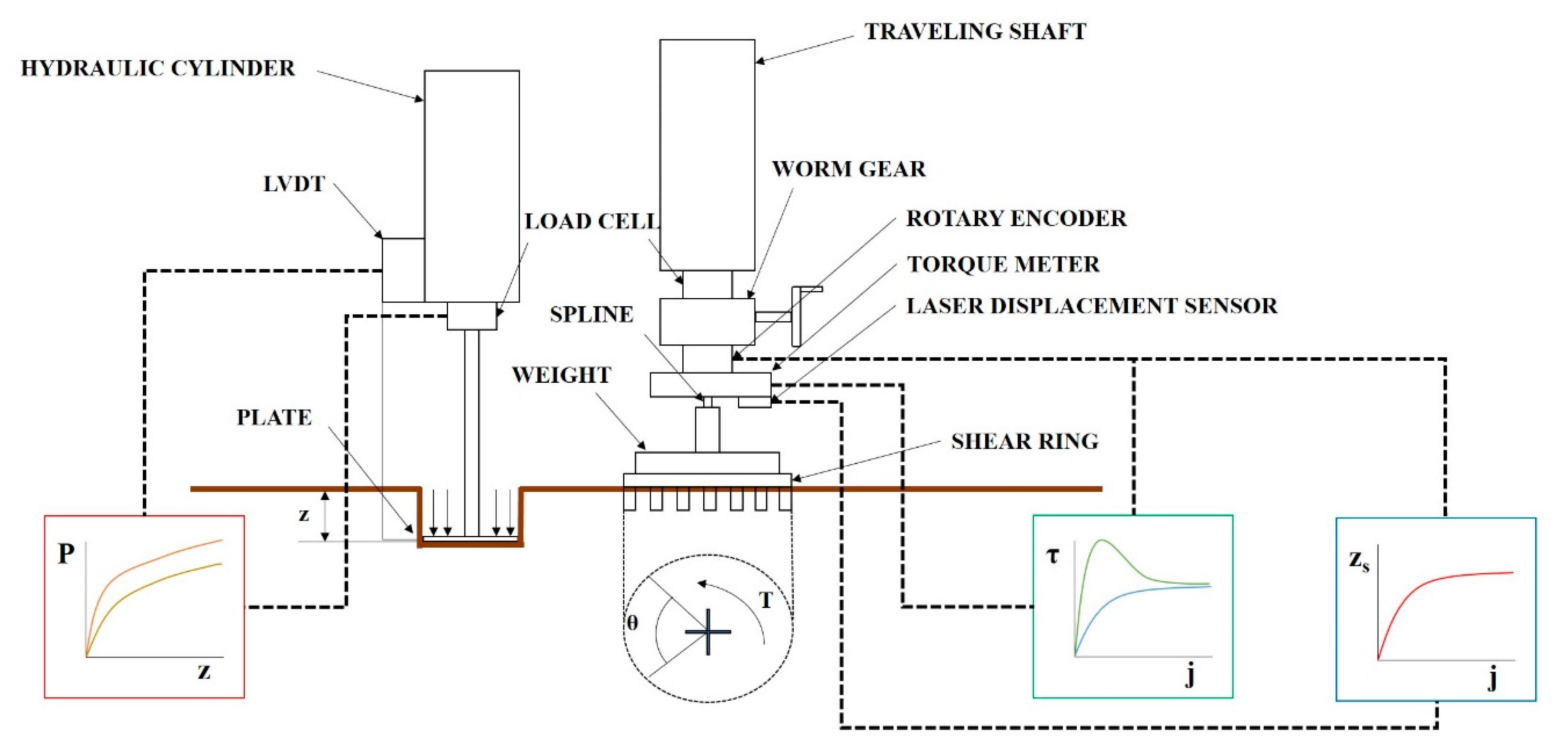
Figure 1 shows a schematic of the developed bevameter.
The pressure–sinkage test device measures the normal pressure of the soil by sinking plates of different sizes into the soil surface. The piston connected to the hydraulic cylinder is lowered by hydraulic pressure supplied from the tractor. When the plate connected to one end of the piston sinks into the soil, the load acting on the plate is measured by a load cell, and the sinkage of the plate is measured with a linear variable differential transformer (LVDT). The measured load is converted into pressure according to the area of the plate, and the pressure–sinkage parameter of the soil can be derived from the soil pressure–sinkage characteristic equation proposed by Bekker [
3] and by using the converted pressure and measured sinkage. Bekker’s equation is as follows:
where
p is the pressure applied to the plate (kPa),
b is the small width or radius (m),
z is the sinkage (m), and
(
),
(
), and
n (dimensionless) are pressure–sinkage parameters.
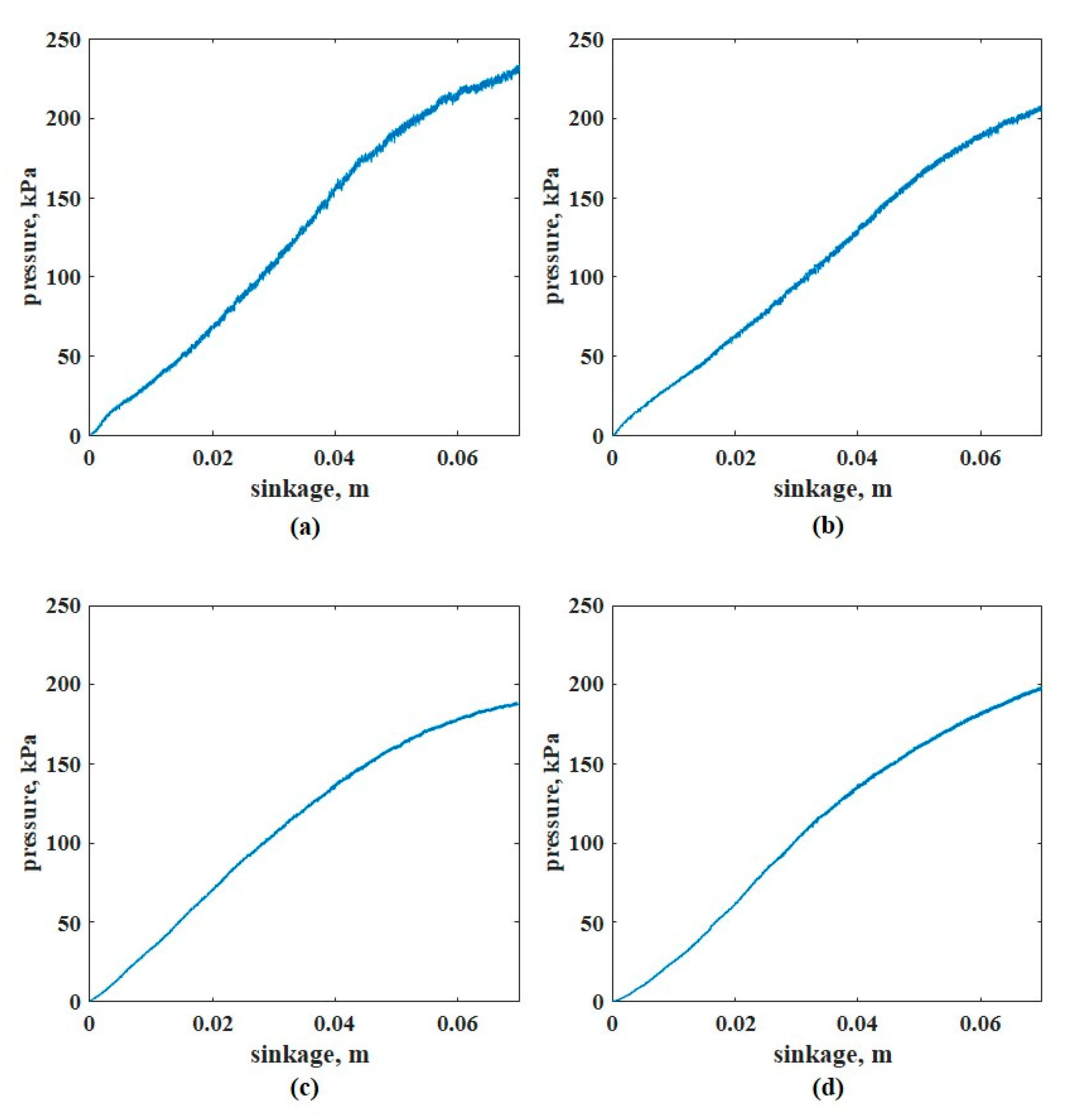
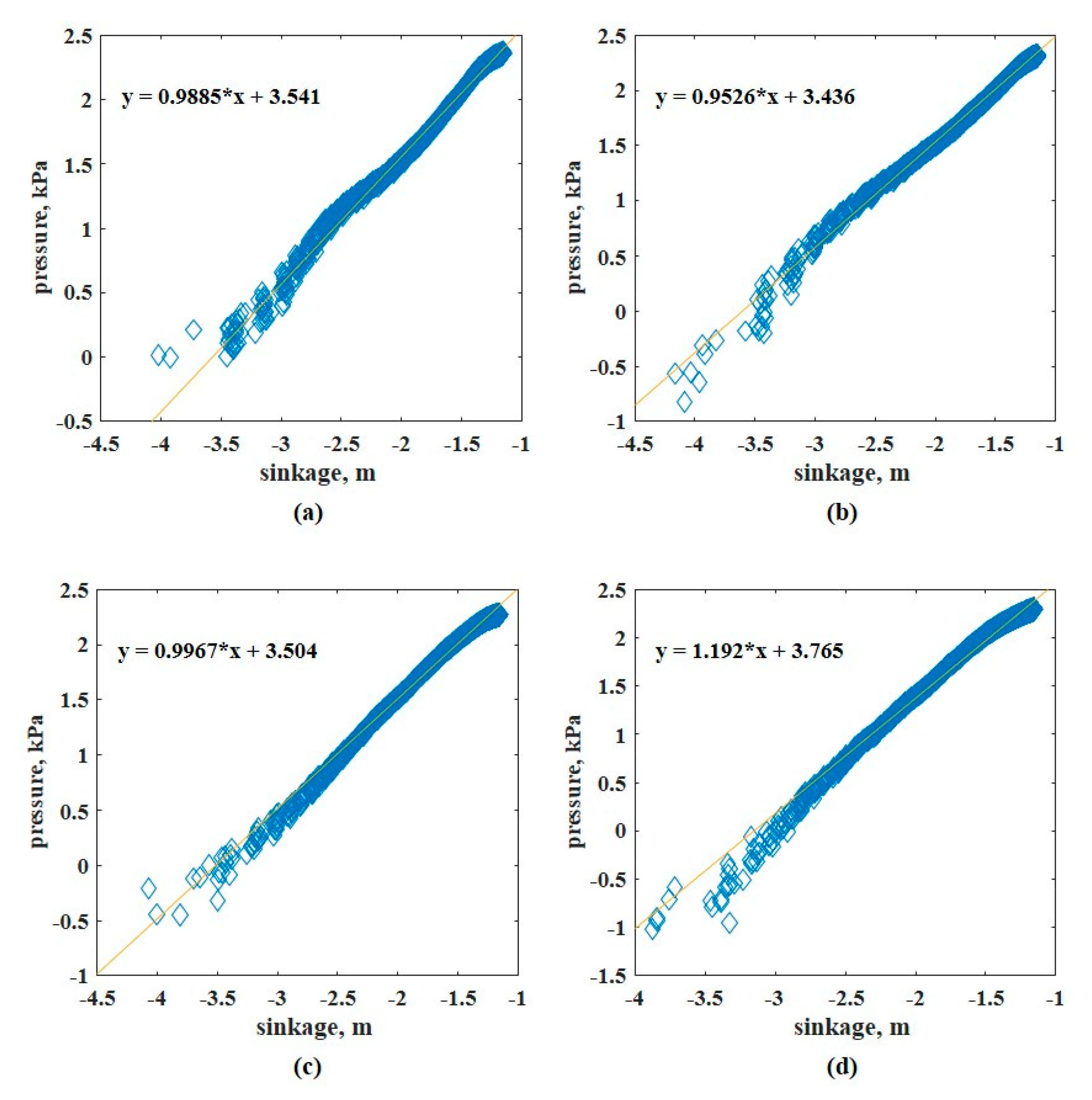
Figure 2 shows the pressure–sinkage test device developed in this study. All the plates in this study were circular with diameters of 40, 60, 80, and 100 mm, respectively. In the test, the four pairs of plate couples were used—60–40 mm, 60–80 mm, 60–100 mm, and 100–80 mm—based on the 60 mm and 100 mm couples which were most commonly used in the current study.
The three pressure–sinkage parameters (
,
,
n) of the soil were derived as follows, where
i = 1, 2:
- (1)
The log-log scale is applied to the two measured pressure–sinkage data:
=
- (2)
The two graphs are expressed in linear form using the least-squares method.
- (3)
is derived as the average value of the slopes of the two straight lines.
- (4)
is derived using the y-intercept values of the straight lines.
- (5)
and
can be determined by the following equations:
.
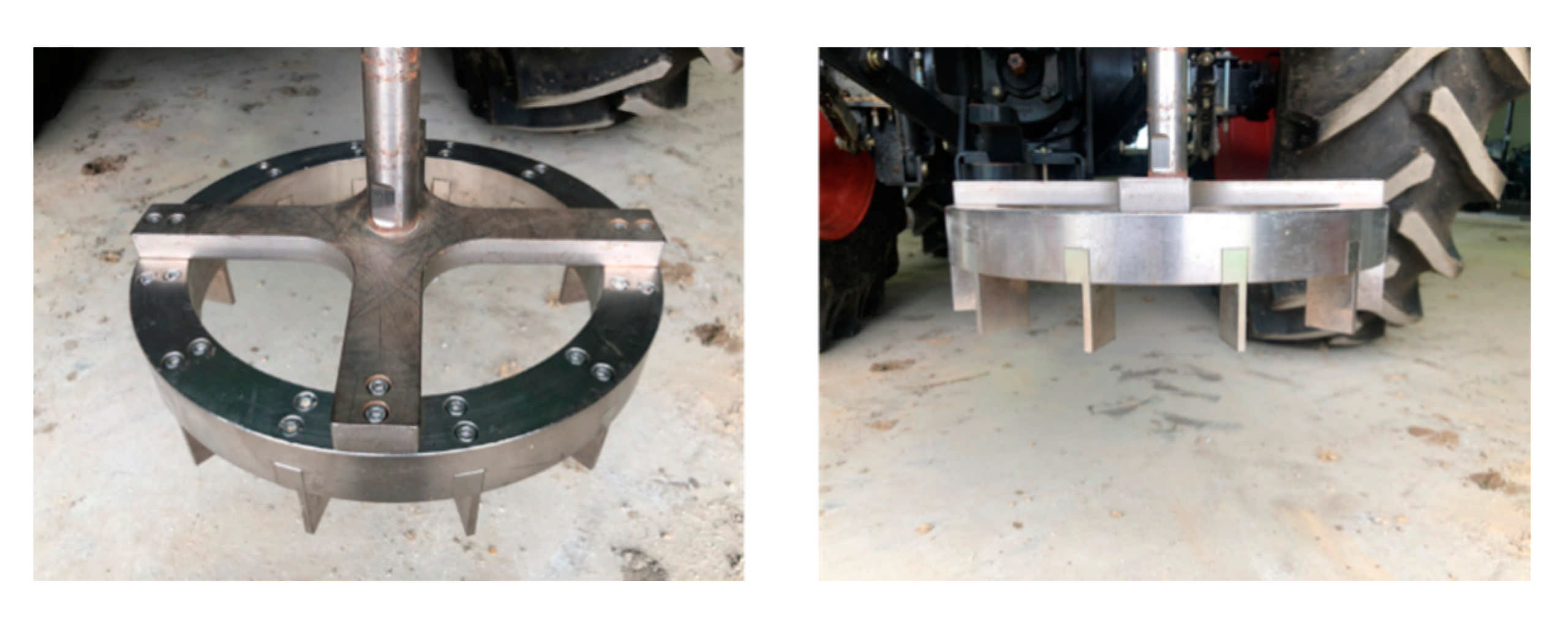
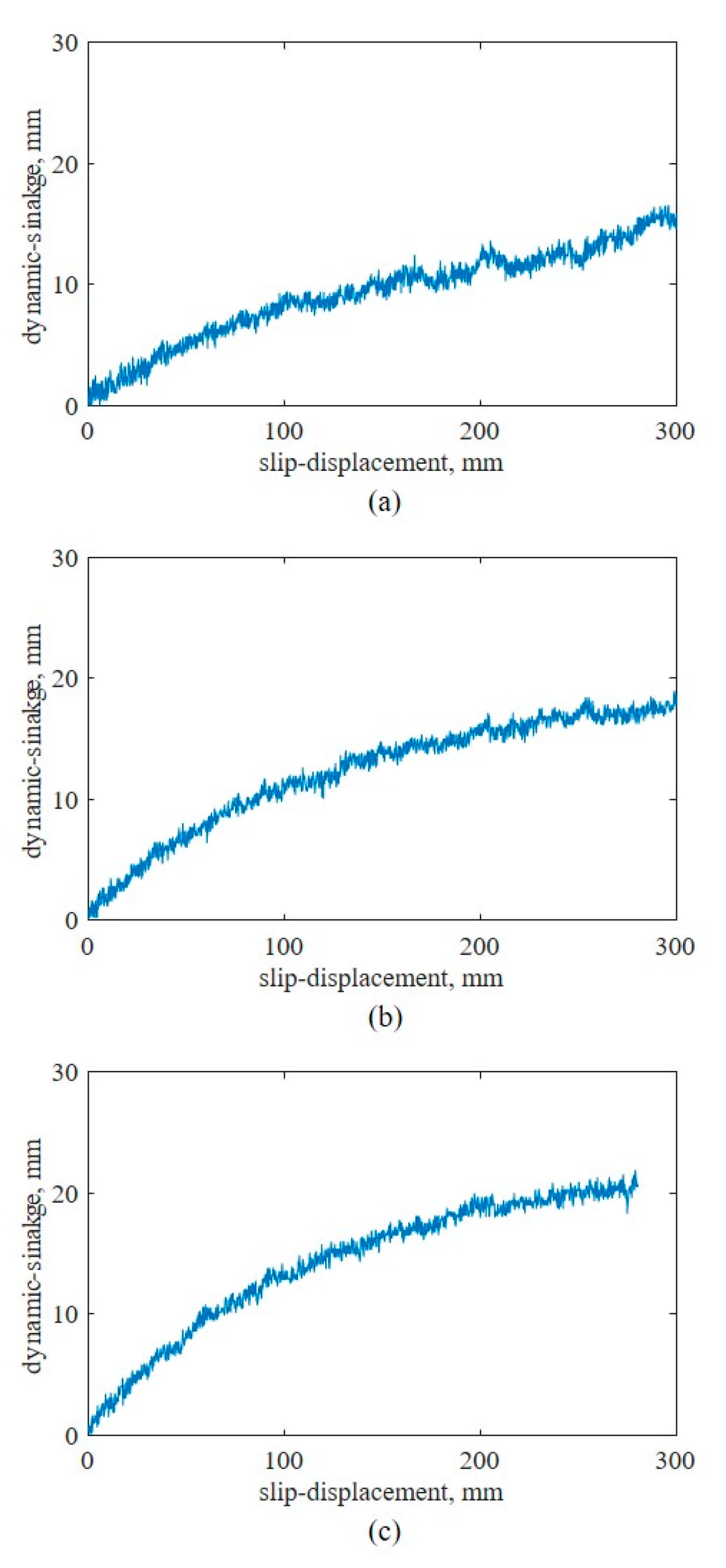
The shear test device measures the shear stress of the soil according to slip displacement while the shear ring is rotated at a constant angular speed and a constant normal pressure is applied to the shear ring. The developed shear test device was designed to rotate the shear ring with a worm gear and hand wheel at a gear ratio of 30:1. An electric actuator was not used because that would make the initial torque difficult to control, and it was difficult to maintain a constant rotational speed when slip sinkage occurred.
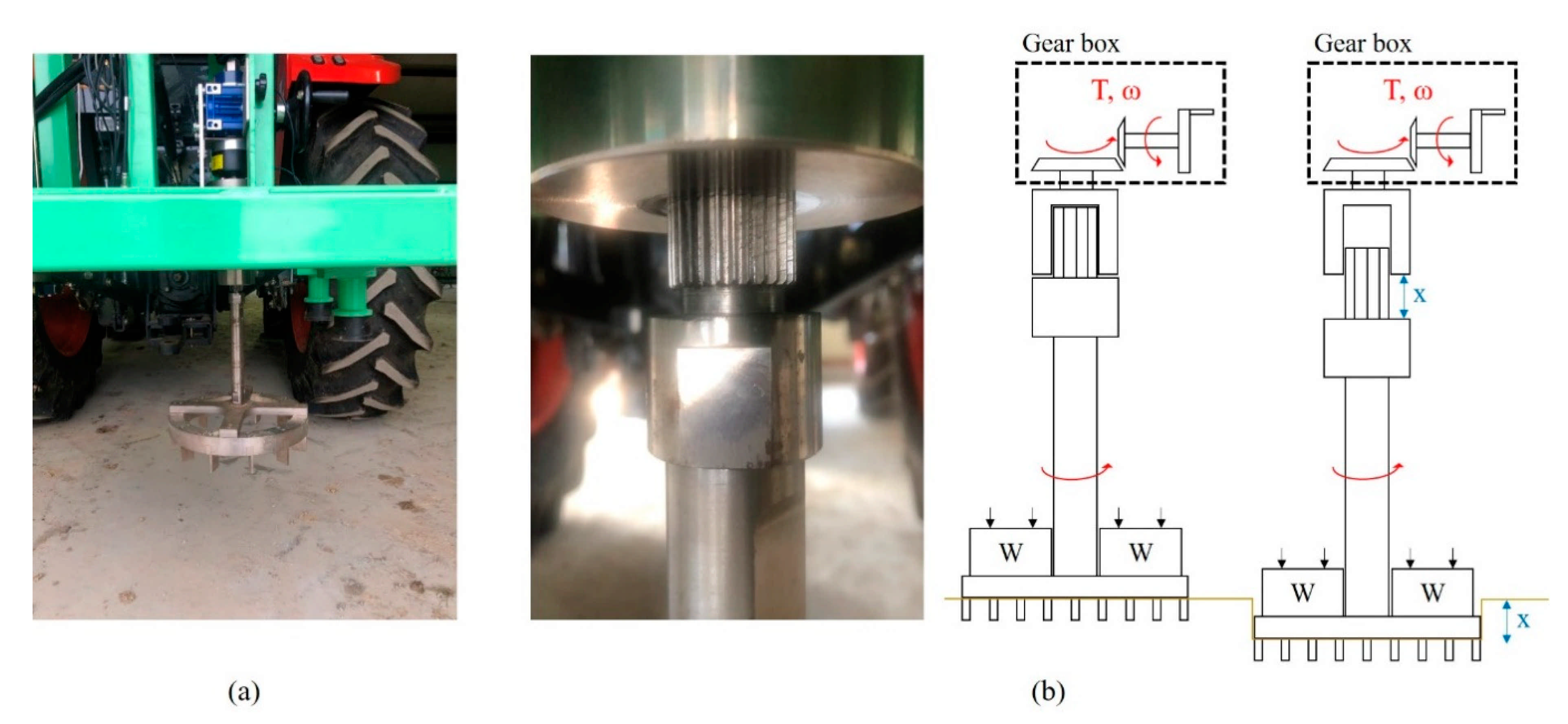
Figure 3a shows the shear test device. It was developed to make slip sinkage possible according to the angular displacement from a spline installed on top of the shaft. The worm gear is rotated by the hand wheel to rotate the shaft connected to the shear ring. As the shear ring rotates, the angular displacement and torque are measured with a rotary encoder attached to the shear ring and torque meter. The measured angular displacement and torque are calculated from the slip displacement and shear stress according to the dimensions of the shear ring. The slip sinkage is measured with the shear test device by a laser displacement sensor. The measured shear stress–slip displacement is used to derive the shear stress parameters, and the shear stress and vehicle parameters are used to predict the propulsion of a vehicle on the soil surface. The measured slip sinkage and slip displacement are used to predict the additional sinkage and motion resistance of a vehicle on the soil surface.
Figure 3b shows the spline attached to the shear test device.
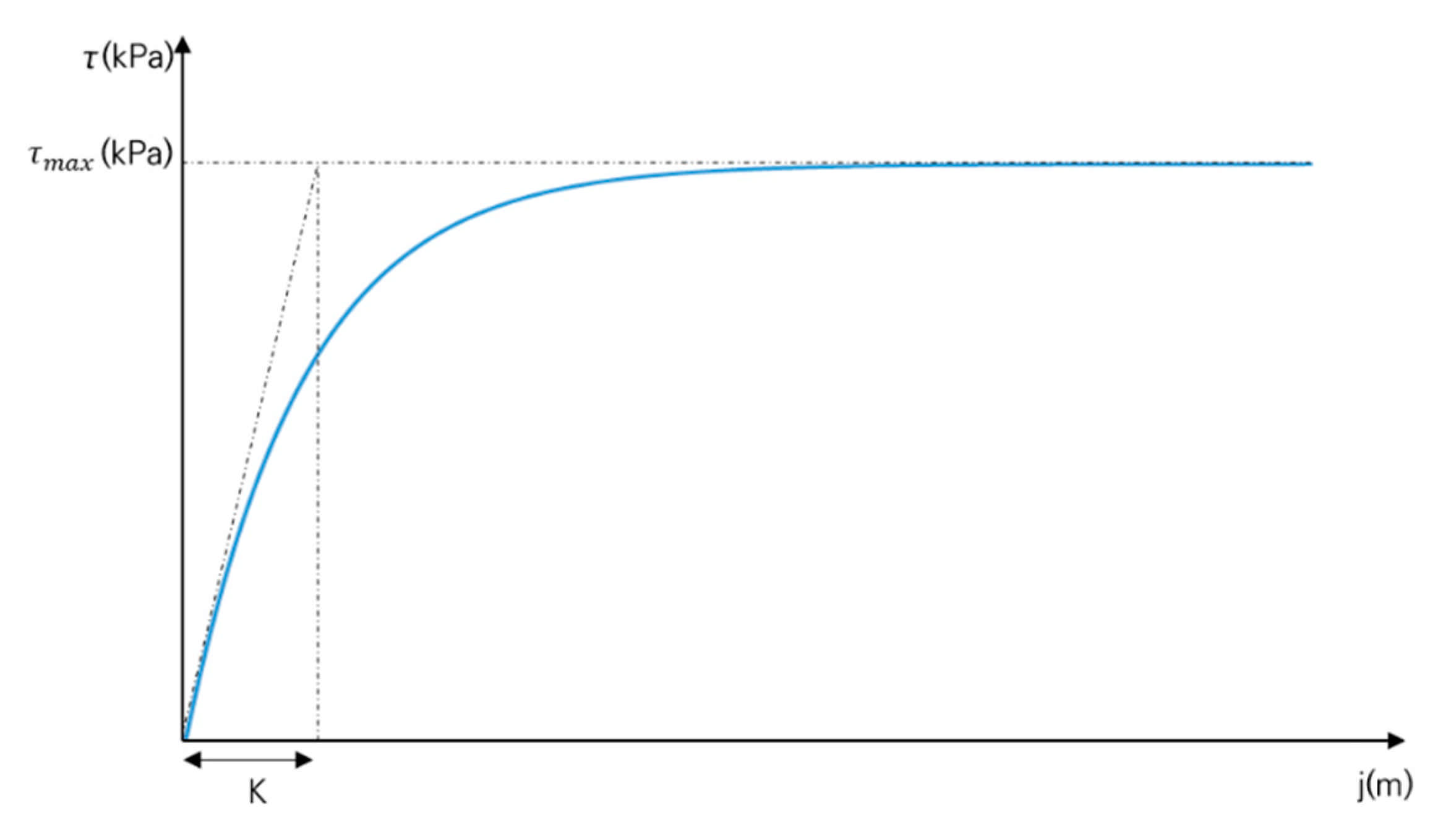
The measured slip displacements and shear stress parameters were derived from the shear stress–slip displacement characteristic equation of Janosi and Hanamoto [
19] for soil hardening behavior and the shear stress–slip displacement characteristic equation of Wong [
20] for soil softening behavior. The shear stress–slip displacement characteristic equation of Janosi and Hanamoto [
19] is as follows:
where
is the shear stress (kPa), p is the normal pressure (kPa), j is the slip displacement (m), c is the cohesion (kPa),
is the angle of internal friction (°), and K is the soil deformation coefficient (m).
Figure 4 shows the characteristics of soil hardening behavior. In tests with soil hardening behavior, c and
can be derived with the Mohr–Coulomb failure criterion, and K can be derived from the initial slope and maximum shear stress of the measurement data [
19].
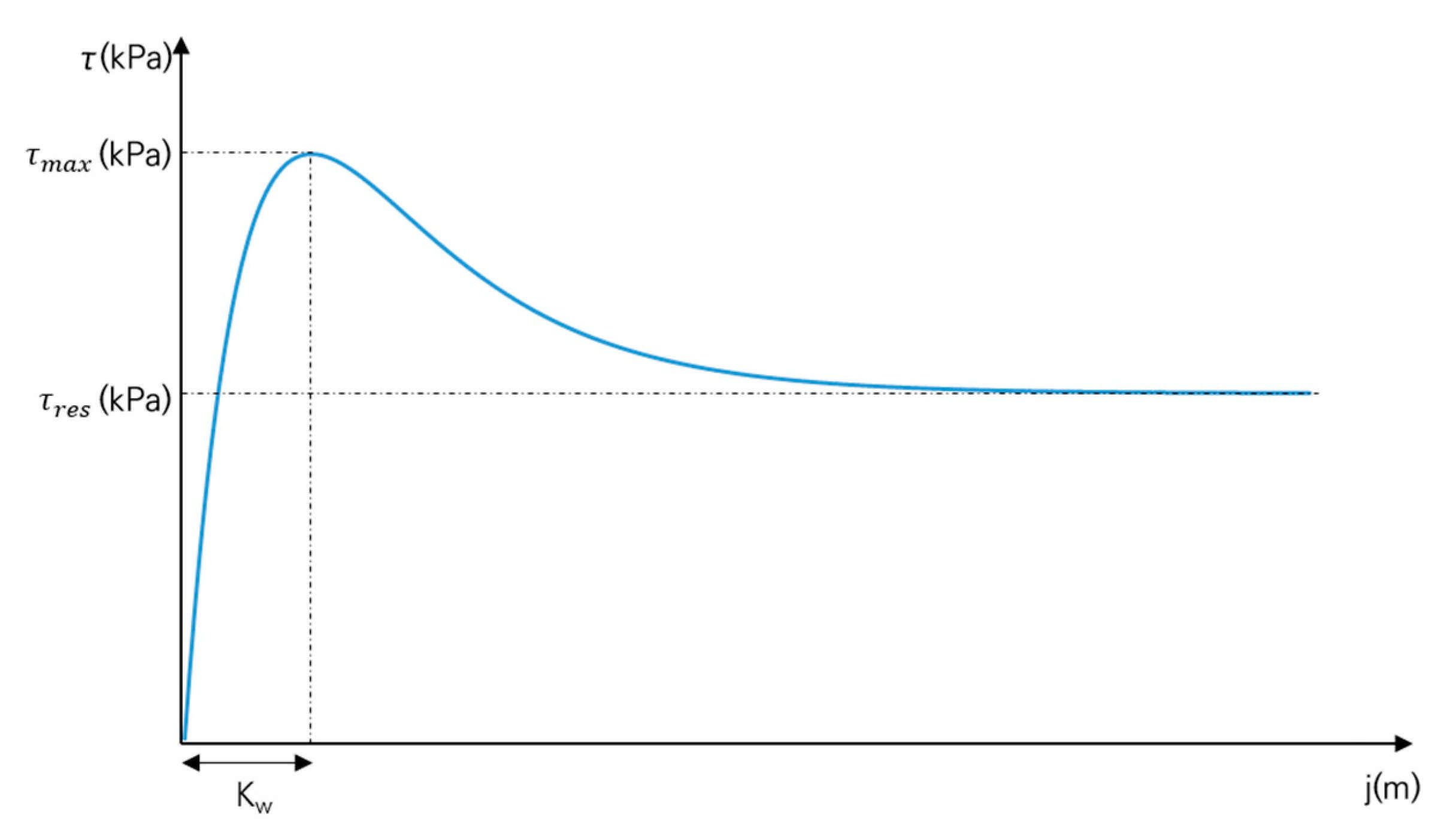
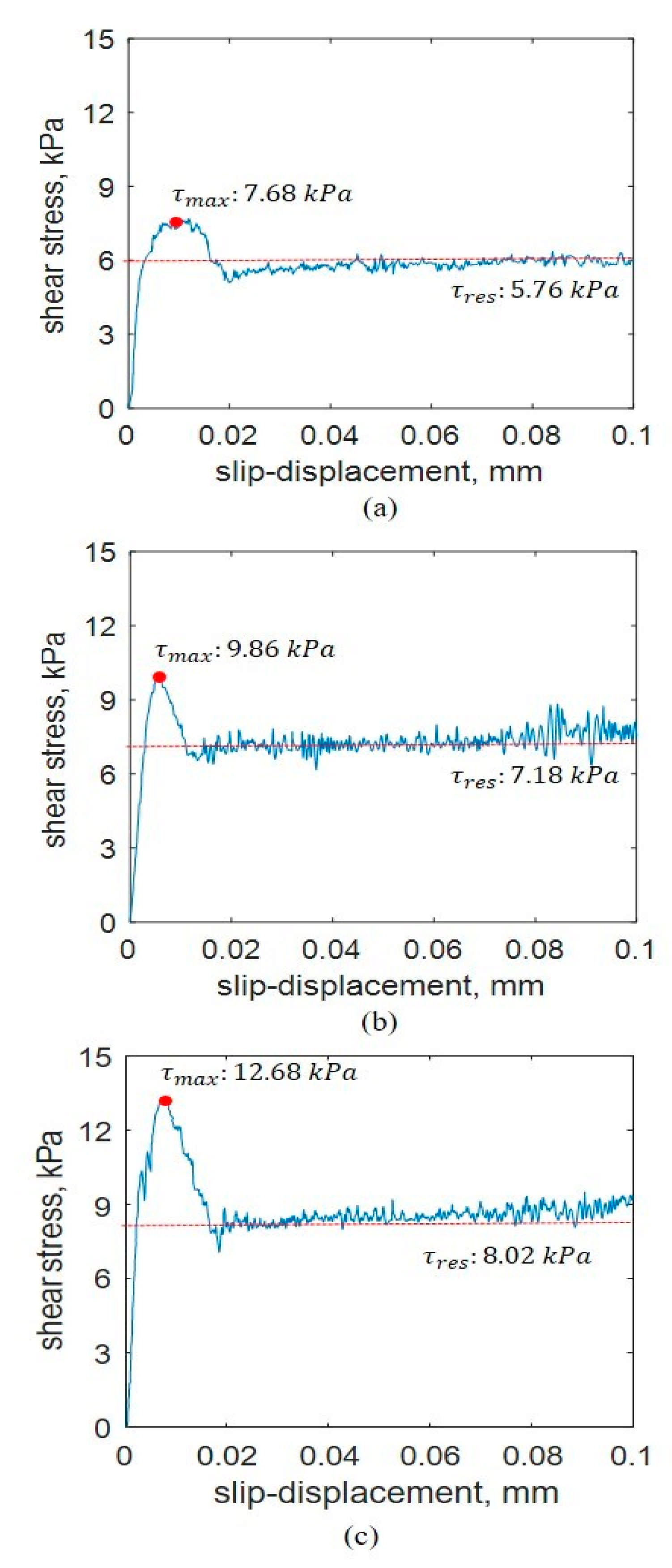
The shear stress–slip displacement characteristics equation of Wong [
20] is expressed as follows:
where
is the ratio of the residual shear stress to the maximum shear stress (dimensionless) and
is the shear deformation coefficient (m).
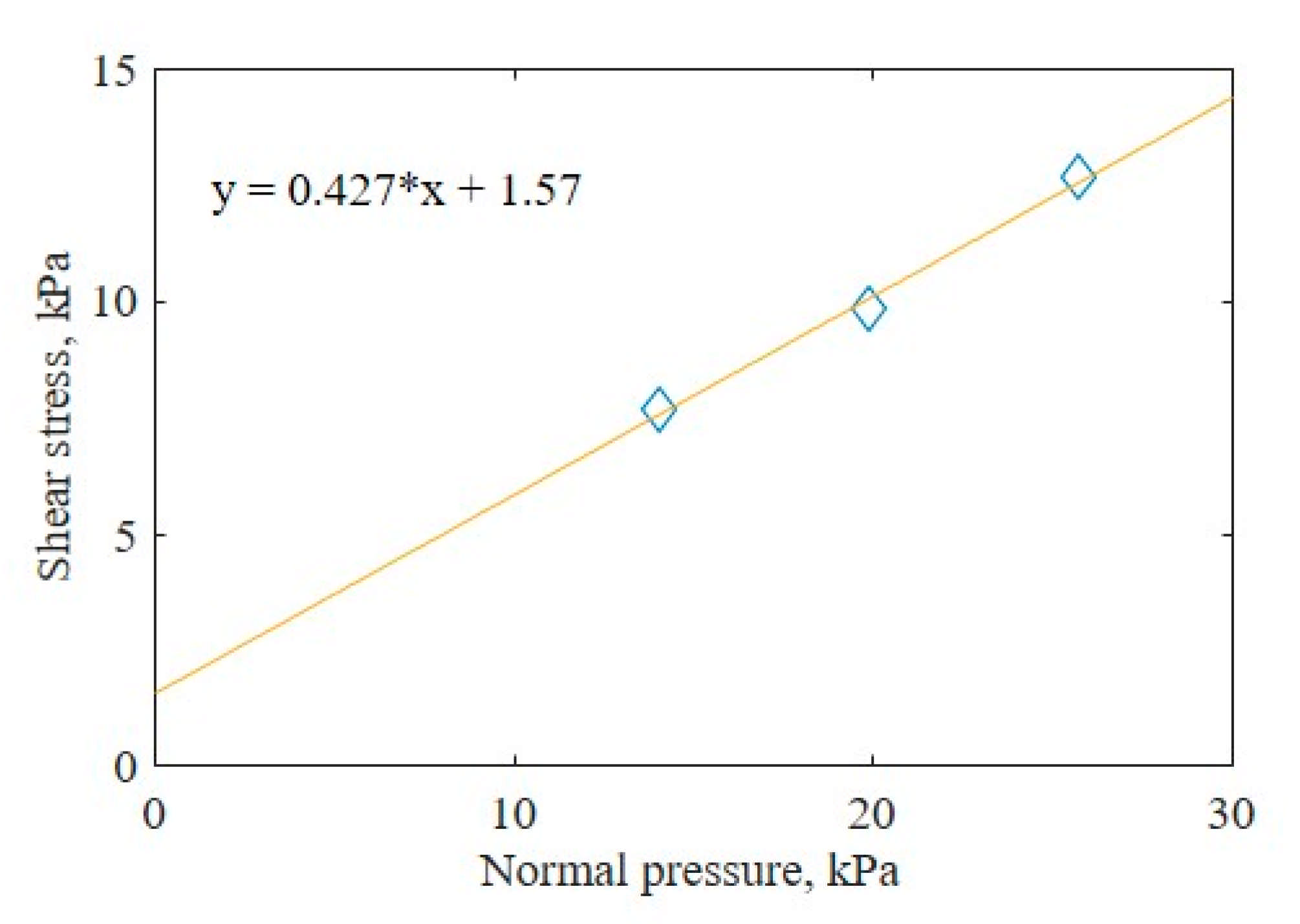
Figure 5 shows the characteristics of soil softening behavior. In tests with soil softening behavior, c and
can be derived with the Mohr–Coulomb failure criterion,
can be derived from the ratio of the residual shear stress to the maximum shear stress, and
can be derived from the slip displacement of the maximum shear stress.
refers to the maximum shear stress measured during the shear test with soil softening behavior, and
refers to the value of the shear stress that is converged to after
.
The outer and inner diameters of the shear ring developed in this study were 340 and 270 mm, respectively, and 40-mm-high grousers were placed at intervals and tightened with bolts.
Figure 6 shows a shear ring with grousers placed at intervals of 30°.
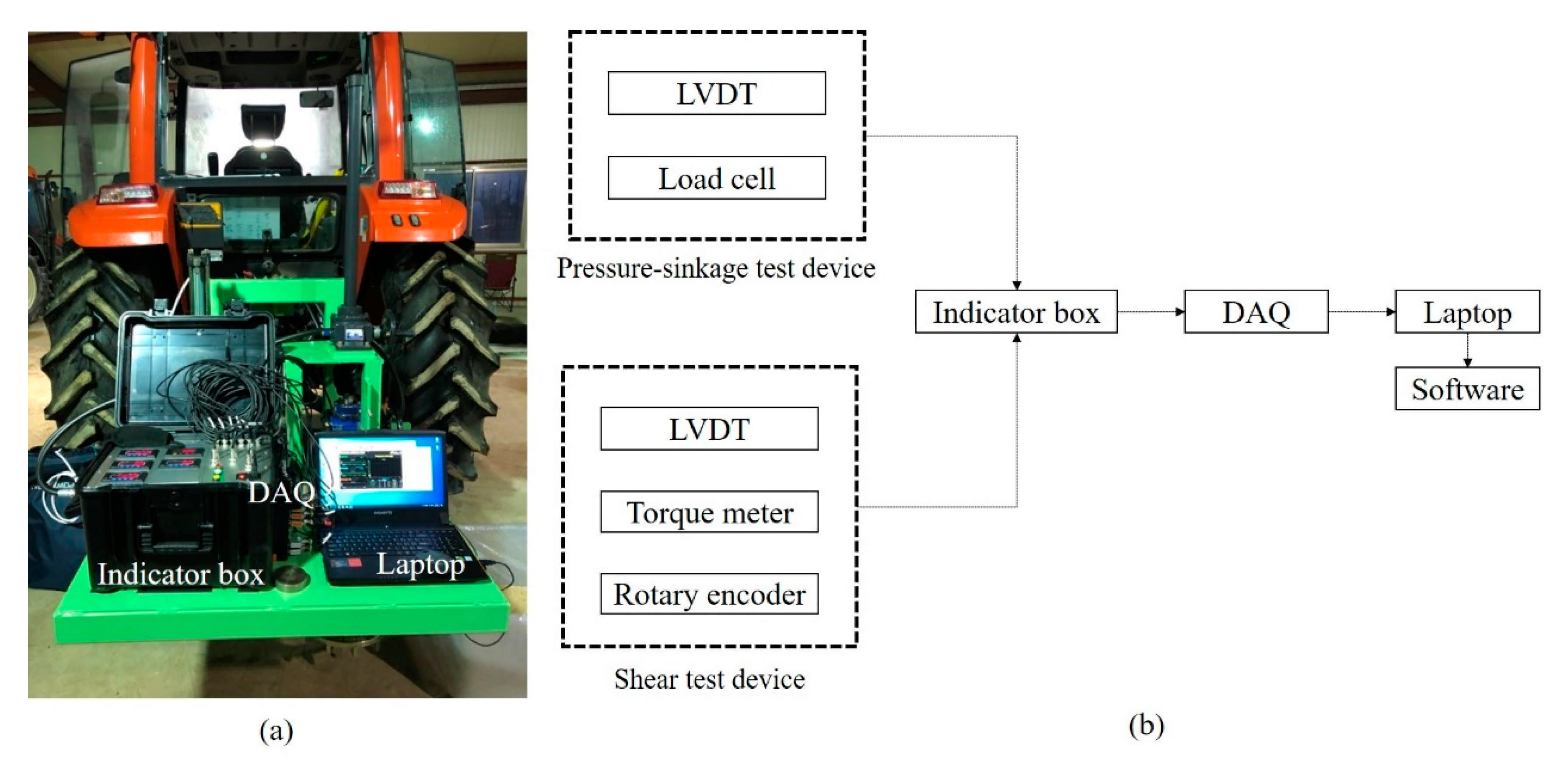
Figure 7 shows a bevameter attached to the three-point hitch and hydraulic port of the tractor, along with the data acquisition device (DAQ), sensors, and laptop.
Table 1 summarizes the types and models of sensors used in the developed bevameter.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}