
The MindGomoku: An Online P300 BCI Game Based on Bayesian Deep Learning

 ,
,  , ,
, ,
Abstract
:1. Introduction
- (1)
- A new BCI video game based on P300 called the MindGomoku: We propose and implement this game.
- (2)
- The introduction of a P300 interactive visual stimulation paradigm for BCI applications: We present a paradigm based on BCI user feedback.
- (3)
- A novel simplified Bayesian convolutional neural network (SBCNN) architecture for P300 detection.
- (4)
- An evaluation of our system on 10 naive subjects.
2. Methods
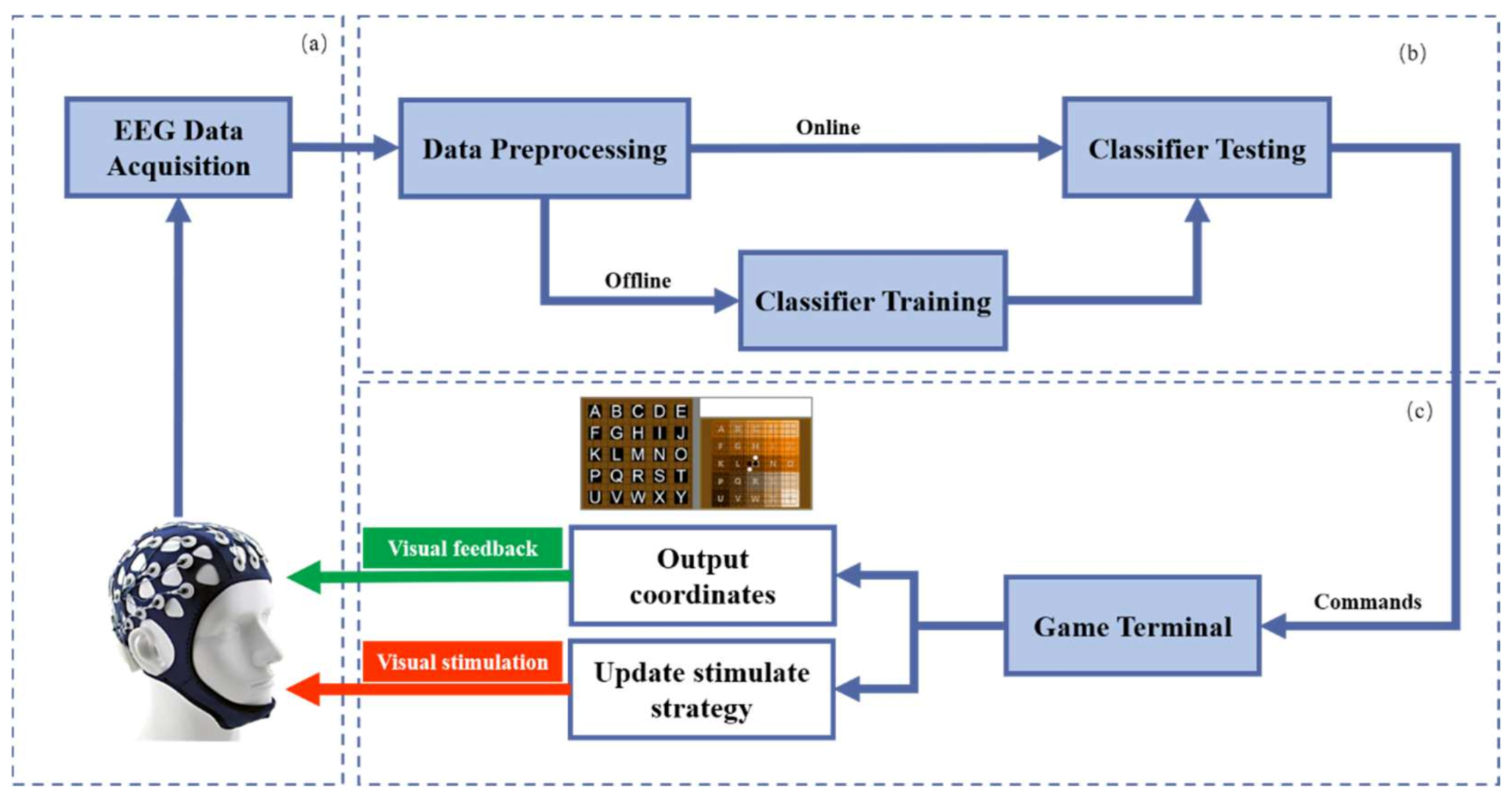
2.1. System Framework
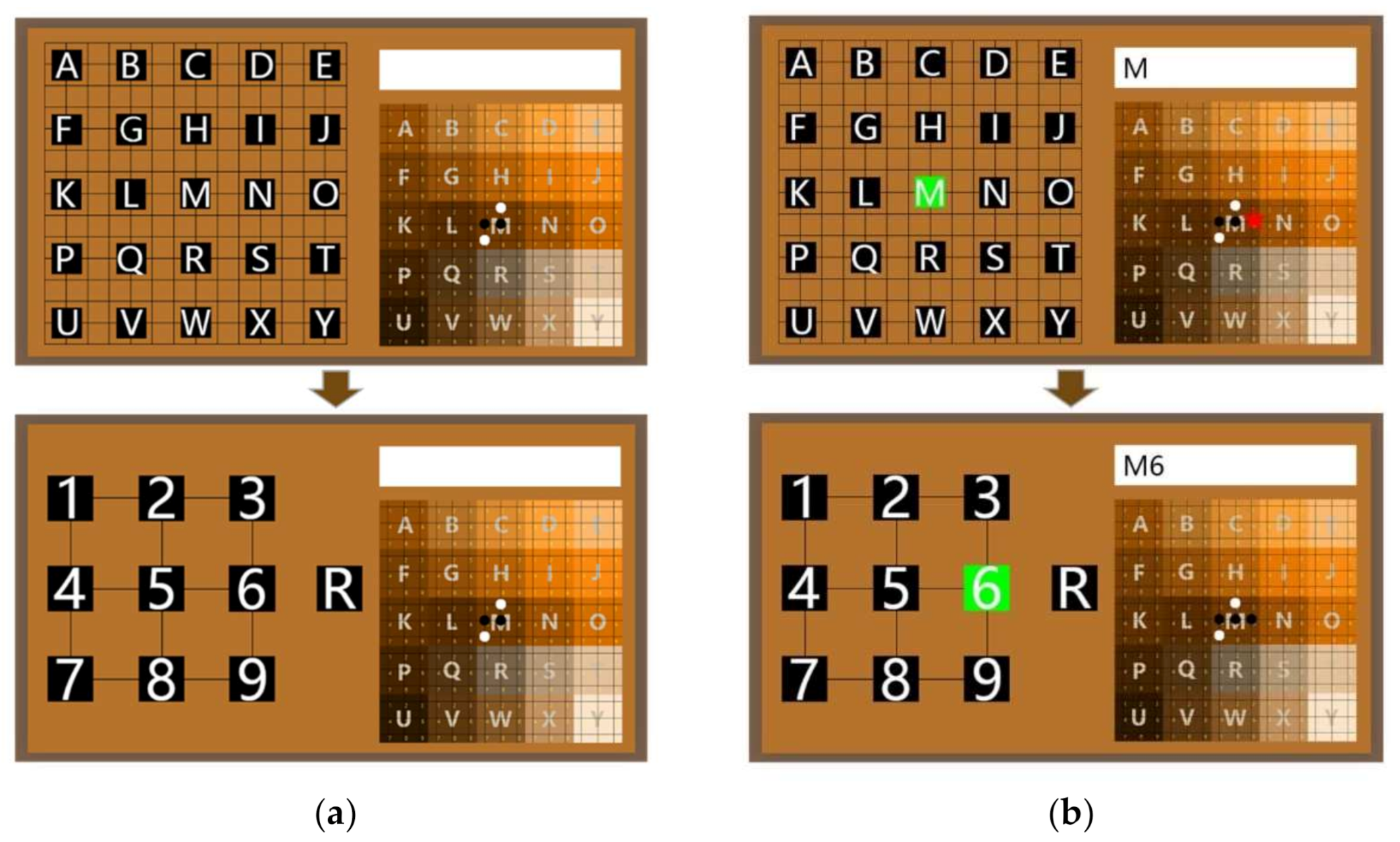
2.2. Paradigm Design
2.3. EEG Data Acquisition and Preprocessing
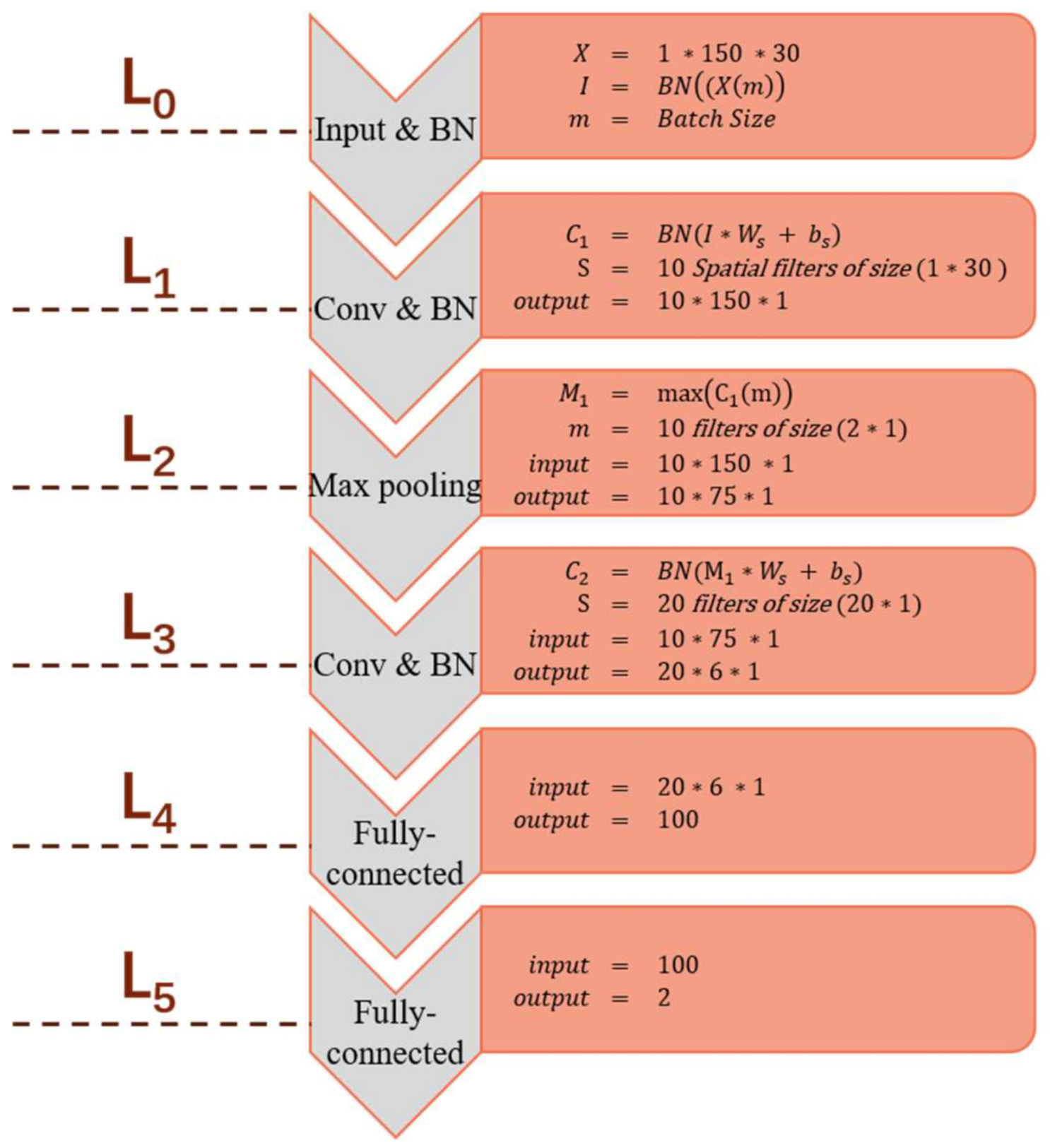
2.4. SBCNN Architecture
| Algorithm 1 The proposed character recognition algorithm |
| Input: EEG Data, X with the size of (N × 150 × 30) |
| Output: Predict Result C |
| Initialize: i ← 0, P(N) ← 0 |
| for each i ∈ [1, N] do |
| Normalized Data: Ii ← BN(Xi) |
| Extract spatial feature, filter size of(1 × 30): Cli ← ReLU(BN((Ii · Ws + bs)) |
| Pooling, apply with stride(2 × 1): Mi ← maxpooling (C1i) |
| Extract temporal feature, filter size of(20 × 1): C2i ← ReLU(BN((Mi · Ws + bs)) |
| Fully connected: |
| F1i ← fully connected(C2i), Fli ← Softmax(Fli) |
| F2i ← fully connected(F2i) |
| P(i) ← F2i[1] |
| end for |
| C ← max(P) |
3. Experiment and Result
3.1. Subjects
3.2. Experiment and Result
3.2.1. Training Session
3.2.2. Experiment I
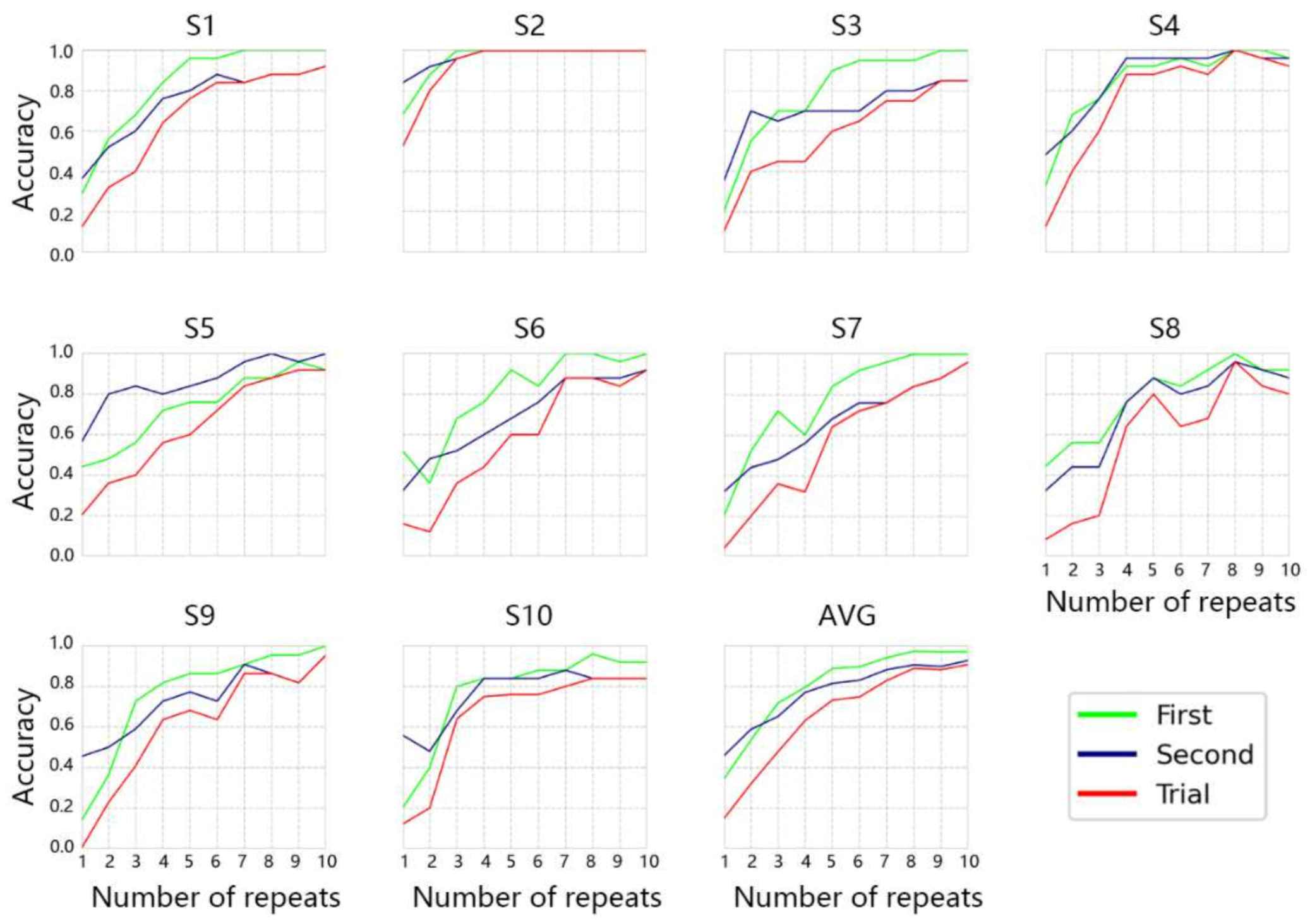
3.2.3. Experiment II
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Birbaumer, N.; Kubler, A.; Ghanayim, N.; Hinterberger, T.; Perelmouter, J.; Kaiser, J.; Iversen, I.; Kotchoubey, B.; Neumann, N.; Flor, H. The Thought Translation Device (TTD) for Completely Paralyzed Patients. IEEE Trans. Rehab. Eng. 2000, 8, 190–193. [Google Scholar] [CrossRef] [Green Version]
- Allison, B.Z.; Wolpaw, E.W.; Wolpaw, J.R. Brain–Computer Interface Systems: Progress and Prospects. Expert Rev. Med. Devices 2007, 4, 463–474. [Google Scholar] [CrossRef]
- Mak, J.N.; Wolpaw, J.R. Clinical Applications of Brain-Computer Interfaces: Current State and Future Prospects. IEEE Rev. Biomed. Eng. 2009, 2, 187–199. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Coyle, S.; Ward, T.; Markham, C. Brain–Computer Interfaces: A Review. Interdiscip. Sci. Rev. 2003, 28, 112–118. [Google Scholar] [CrossRef] [Green Version]
- Pfurtscheller, G.; Neuper, C.; Muller, G.R.; Obermaier, B.; Krausz, G.; Schlogl, A.; Scherer, R.; Graimann, B.; Keinrath, C.; Skliris, D.; et al. Graz-BCI: State of the Art and Clinical Applications. IEEE Trans. Neural Syst. Rehabil. Eng. 2003, 11, 1–4. [Google Scholar] [CrossRef] [PubMed]
- Kennedy, P.R.; Bakay, R.A.E. Restoration of Neural Output from a Paralyzed Patient by a Direct Brain Connection. NeuroReport 1998, 9, 1707–1711. [Google Scholar] [CrossRef]
- Kerous, B.; Skola, F.; Liarokapis, F. EEG-Based BCI and Video Games: A Progress Report. Virtual Real. 2018, 22, 119–135. [Google Scholar] [CrossRef]
- Bos, D.P.-O.; Reuderink, B.; van de Laar, B.; Gurkok, H.; Muhl, C.; Poel, M.; Heylen, D.; Nijholt, A. Human-Computer Interaction for BCI Games: Usability and User Experience. In Proceedings of the 2010 International Conference on Cyberworlds, Singapore, 20–22 October 2010; pp. 277–281. [Google Scholar]
- Blankertz, B.; Tangermann, M.; Vidaurre, C.; Fazli, S.; Sannelli, C.; Haufe, S.; Maeder, C.; Ramsey, L.; Sturm, I.; Curio, G.; et al. The Berlin Brain–Computer Interface: Non-Medical Uses of BCI Technology. Front. Neurosci. 2010, 4. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Yu, Y.; Xu, M.; Liu, Y.; Yin, E.; Zhou, Z. Towards a Hybrid BCI Gaming Paradigm Based on Motor Imagery and SSVEP. Int. J. Hum. Comput. Interact. 2019, 35, 197–205. [Google Scholar] [CrossRef]
- Marshall, D.; Coyle, D.; Wilson, S.; Callaghan, M. Games, Gameplay, and BCI: The State of the Art. IEEE Trans. Comput. Intell. AI Games 2013, 5, 82–99. [Google Scholar] [CrossRef]
- Laamarti, F.; Eid, M.; El Saddik, A. An Overview of Serious Games. Int. J. Comput. Games Technol. 2014, 2014, 1–15. [Google Scholar] [CrossRef]
- Martinez, P.; Bakardjian, H.; Cichocki, A. Fully Online Multicommand Brain-Computer Interface with Visual Neurofeedback Using SSVEP Paradigm. Comput. Intell. Neurosci. 2007, 2007, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Bonnet, L.; Lotte, F.; Lecuyer, A. Two Brains, One Game: Design and Evaluation of a Multiuser BCI Video Game Based on Motor Imagery. IEEE Trans. Comput. Intell. AI Games 2013, 5, 185–198. [Google Scholar] [CrossRef] [Green Version]
- Martišius, I.; Damaševičius, R. A Prototype SSVEP Based Real Time BCI Gaming System. Comput. Intell. Neurosci. 2016, 2016, 1–15. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Finke, A.; Lenhardt, A.; Ritter, H. The MindGame: A P300-Based Brain–Computer Interface Game. Neural Netw. 2009, 22, 1329–1333. [Google Scholar] [CrossRef] [PubMed]
- Angeloni, C.; Salter, D.; Corbit, V.; Lorence, T.; Yu, Y.-C.; Gabel, L.A. P300-Based Brain-Computer Interface Memory Game to Improve Motivation and Performance. In Proceedings of the 2012 38th Annual Northeast Bioengineering Conference (NEBEC), Philadelphia, PA, USA, 16–18 March 2012; pp. 35–36. [Google Scholar]
- Li, F.; He, F.; Wang, F.; Zhang, D.; Xia, Y.; Li, X. A Novel Simplified Convolutional Neural Network Classification Algorithm of Motor Imagery EEG Signals Based on Deep Learning. Appl. Sci. 2020, 10, 1605. [Google Scholar] [CrossRef]
- Zhu, D.; Bieger, J.; Garcia Molina, G.; Aarts, R.M. A Survey of Stimulation Methods Used in SSVEP-Based BCIs. Comput. Intell. Neurosci. 2010, 2010, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Nijholt, A.; Bos, D.P.-O.; Reuderink, B. Turning Shortcomings into Challenges: Brain–Computer Interfaces for Games. Entertain. Comput. 2009, 1, 85–94. [Google Scholar] [CrossRef] [Green Version]
- Bostanov, V. BCI Competition 2003—Data Sets Ib and IIb: Feature Extraction From Event-Related Brain Potentials With the Continuous Wavelet Transform and t-Value Scalogram. IEEE Trans. Biomed. Eng. 2004, 51, 1057–1061. [Google Scholar] [CrossRef]
- Krusienski, D.J.; Sellers, E.W.; Cabestaing, F.; Bayoudh, S.; McFarland, D.J.; Vaughan, T.M.; Wolpaw, J.R. A Comparison of Classification Techniques for the P300 Speller. J. Neural Eng. 2006, 3, 299–305. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Ma, Z.; Lu, W.; Li, Y. Automatic Removal of the Eye Blink Artifact from EEG Using an ICA-Based Template Matching Approach. Physiol. Meas. 2006, 27, 425–436. [Google Scholar] [CrossRef]
- Blankertz, B.; Muller, K.R.; Krusienski, D.J.; Schalk, G.; Wolpaw, J.R.; Schlogl, A.; Pfurtscheller, G.; Millan, J.D.R.; Schroder, M.; Birbaumer, N. The BCI Competition III: Validating Alternative Approaches to Actual BCI Problems. IEEE Trans. Neural Syst. Rehabil. Eng. 2006, 14, 153–159. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep Learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going Deeper with Convolutions. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- Cecotti, H.; Graser, A. Convolutional Neural Networks for P300 Detection with Application to Brain-Computer Interfaces. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 433–445. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Wu, W.; Gu, Z.; Yu, Z.; Qi, F.; Li, Y. Deep Learning Based on Batch Normalization for P300 Signal Detection. Neurocomputing 2018, 275, 288–297. [Google Scholar] [CrossRef]
- Gu, Z.; Chen, Z.; Zhang, J.; Zhang, X.; Yu, Z.L. An Online Interactive Paradigm for P300 Brain–Computer Interface Speller. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 152–161. [Google Scholar] [CrossRef] [PubMed]
- Qu, J.; Wang, F.; Xia, Z.; Yu, T.; Xiao, J.; Yu, Z.; Gu, Z.; Li, Y. A Novel Three-Dimensional P300 Speller Based on Stereo Visual Stimuli. IEEE Trans. Hum. Mach. Syst. 2018, 48, 392–399. [Google Scholar] [CrossRef]
- Obeidat, Q.T.; Campbell, T.A.; Kong, J. Introducing the Edges Paradigm: A P300 Brain–Computer Interface for Spelling Written Words. IEEE Trans. Hum. Mach. Syst. 2015, 45, 727–738. [Google Scholar] [CrossRef] [Green Version]
- Farwell, L.A.; Donchin, E. Talking off the Top of Your Head: Toward a Mental Prosthesis Utilizing Event-Related Brain Potentials. Electroencephalogr. Clin. Neurophysiol. 1988, 70, 510–523. [Google Scholar] [CrossRef]
- Shi, J.; Shen, J.; Ji, Y.; Du, F. A Submatrix-Based P300 Brain-Computer Interface Stimulus Presentation Paradigm. J. Zhejiang Univ. Sci. C 2012, 13, 452–459. [Google Scholar] [CrossRef]
- Guan, C.; Thulasidas, M.; Wu, J. High Performance P300 Speller for Brain-Computer Interface. In Proceedings of the IEEE International Workshop on Biomedical Circuits and Systems, Singapore, 1–3 December 2004; pp. 13–16. [Google Scholar]
- Fazel-Rezai, R.; Abhari, K. A Region-Based P300 Speller for Brain-Computer Interface. Can. J. Electr. Comput. Eng. 2009, 34, 81–85. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, S.; Li, F.; Tian, S.; Wang, J.; Gong, R. An Efficient ECG Denoising Method Based on Empirical Mode 3 Decomposition, Sample Entropy and Improved Threshold Function. Wirel. Commun. Mob. Comput. 2020, 2020, 8811962. [Google Scholar] [CrossRef]
- Gal, Y.; Ghahramani, Z. Bayesian Convolutional Neural Networks with Bernoulli Approximate Variational Inference. arXiv 2016, arXiv:1506.02158. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift. arXiv 2015, arXiv:1502.03167. [Google Scholar]
- Lawhern, V.J.; Solon, A.J.; Waytowich, N.R.; Gordon, S.M.; Hung, C.P.; Lance, B.J. EEGNet: A Compact Convolutional Network for EEG-Based Brain-Computer Interfaces. J. Neural Eng. 2018, 15, 056013. [Google Scholar] [CrossRef] [Green Version]
- Rakotomamonjy, A.; Guigue, V. BCI Competition III: Dataset II- Ensemble of SVMs for BCI P300 Speller. IEEE Trans. Biomed. Eng. 2008, 55, 1147–1154. [Google Scholar] [CrossRef] [PubMed]
- Kanwisher, N.G. Repetition Blindness: Type Recognition without Token Individuation. Cognition 1987, 27, 117–143. [Google Scholar] [CrossRef]
- Throckmorton, C.S.; Colwell, K.A.; Ryan, D.B.; Sellers, E.W.; Collins, L.M. Bayesian Approach to Dynamically Controlling Data Collection in P300 Spellers. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 508–517. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Liu, S.; Cao, K.; Li, J.; Shi, K.Y.; Wu, L.F. A Comparative Study on Single Display and Region-Based P300 Speller Paradigms for Brain-Computer Interface. AMR 2014, 1061–1062, 1153–1157. [Google Scholar] [CrossRef]
- Allison, B.Z.; Pineda, J.A. ERPs Evoked by Different Matrix Sizes: Implications for a Brain Computer Interface (Bci) System. IEEE Trans. Neural Syst. Rehabil. Eng. 2003, 11, 110–113. [Google Scholar] [CrossRef] [PubMed]
- Ullsperger, P.; Neumann, U.; Gille, H.-G.; Pietschmann, M. P300 and Anticipated Task Difficulty. Int. J. Psychophysiol. 1987, 5, 145–149. [Google Scholar] [CrossRef]
- Shridhar, K.; Laumann, F.; Liwicki, M. A Comprehensive Guide to Bayesian Convolutional Neural Network with Variational Inference. arXiv 2019, arXiv:1506.02158. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| BCI Game Studies | Subjects | Electrodes | Modality | Online Result (for N Subjects) |
|---|---|---|---|---|
| Martinez et al. [13] | N = 5 | 6 | Steady-state visually evoked potential (SSVEP) | 96.5% (medium frequency) 93% (low frequency) |
| Martišius et al. [15] | N = 2 | 4 | SSVEP | 78.2% (linear discriminant analysis (LDA)) 79.3% (support vector machine (SVM), linear kernel)) 80.5% (SVM, radial basis function kernel) |
| Bonnet et al. [14] | N = 20 | 8 | Motor imagery (MI) | 71.25% (single-player mode) 73.9% (two-player mode) |
| Wang et al. [10] | N = 10 | 20 | SSVEP MI | 90.26% 87.01% |
| Finke et al. [16] | N = 11 | NA | P300 | 66% |
| Angeloni et al. [17] | N = 5 | 8 | P300 | 88.47% |
| Subject | S1 | S2 | S3 | S4 | S5 | S6 | S7 | S8 | S9 | S10 | Avg. |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Gender | M | F | M | M | F | F | M | M | F | F | / |
| First sub-trial | 100% | 100% | 100% | 96% | 92% | 100% | 100% | 92% | 100% | 92% | 97.2% |
| Second sub-trial | 92% | 100% | 85% | 96% | 100% | 92% | 96% | 88% | 96% | 84% | 92.9% |
| Complete trial | 92% | 100% | 85% | 92% | 90% | 92% | 96% | 80% | 96% | 84% | 90.7% |
| Subject | Trials | Valid Trials | Accuracy (%) | Total Time (min) | Time per Trial (s) | Win the Game |
|---|---|---|---|---|---|---|
| S1 | 18 | 14 | 94.4 | 11.8 | 25.3 | Yes |
| S2 | 18 | 18 | 100 | 12.83 | 28.6 | No |
| S3 | 17 | 14 | 100 | 11.61 | 26.9 | No |
| S4 | 22 | 18 | 88.9 | 16.08 | 29.8 | No |
| S5 | 20 | 20 | 100 | 13.1 | 25.3 | No |
| S6 | 26 | 25 | 100 | 16.46 | 24.0 | Yes |
| S7 | 21 | 19 | 100 | 13.11 | 23.5 | No |
| S8 | 22 | 19 | 95.4 | 13.43 | 22.7 | Yes |
| S9 | 26 | 24 | 100 | 15.65 | 22.1 | No |
| S10 | 21 | 20 | 100 | 13.23 | 23.8 | Yes |
| Avg | 21.1 | 19.1 | 97.8 | 13.73 | 22.9 | / |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Li, F.; Pan, J.; Zhang, D.; Zhao, S.; Li, J.; Wang, F. The MindGomoku: An Online P300 BCI Game Based on Bayesian Deep Learning. Sensors 2021, 21, 1613. https://doi.org/10.3390/s21051613
Li M, Li F, Pan J, Zhang D, Zhao S, Li J, Wang F. The MindGomoku: An Online P300 BCI Game Based on Bayesian Deep Learning. Sensors. 2021; 21(5):1613. https://doi.org/10.3390/s21051613
Chicago/Turabian StyleLi, Man, Feng Li, Jiahui Pan, Dengyong Zhang, Suna Zhao, Jingcong Li, and Fei Wang. 2021. "The MindGomoku: An Online P300 BCI Game Based on Bayesian Deep Learning" Sensors 21, no. 5: 1613. https://doi.org/10.3390/s21051613
APA StyleLi, M., Li, F., Pan, J., Zhang, D., Zhao, S., Li, J., & Wang, F. (2021). The MindGomoku: An Online P300 BCI Game Based on Bayesian Deep Learning. Sensors, 21(5), 1613. https://doi.org/10.3390/s21051613