Optical Sensing Using Fiber-Optic Multimode Interference Devices: A Review of Nonconventional Sensing Schemes




Abstract
:1. Introduction
2. Fundamentals and Background of Fiber-Based MMI Devices
2.1. Interference between Multiple Modes—Energy Coupling
2.2. Self-Imaging Properties
2.3. Spectral Response
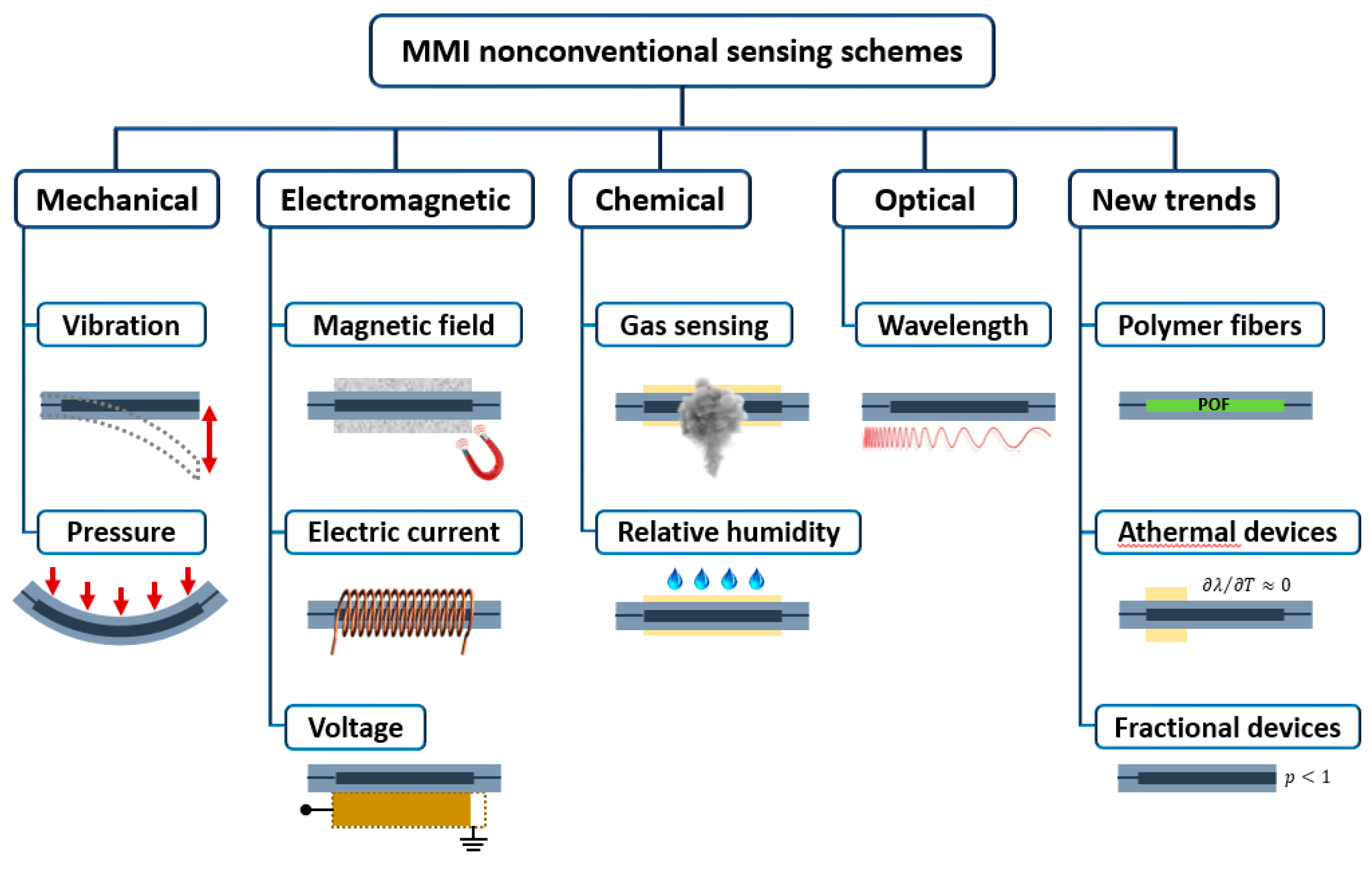
3. MMI-Based Fiber-Optic Sensors
3.1. Conventional Sensing (RI, Temperature, Displacement, and Strain)
3.2. MMI-Based Mechanical Sensing
3.2.1. Vibration
3.2.2. Pressure
3.3. MMI-Based Electromagnetic Sensing
3.3.1. Magnetic Field
3.3.2. Electric Current
3.3.3. Voltage
3.4. MMI-Based Chemical Sensing
3.4.1. Relative Humidity
3.4.2. Gas Sensing
3.5. MMI-Based Wavelength Monitoring
3.6. New Trends in MMI-Based Sensing
3.6.1. MMI Sensing Using Polymer Fibers
3.6.2. Athermal MMI Devices for Measuring the TOC of Liquids
3.6.3. Dynamic Light Scattering Assisted by Fractional MMI Phenomena
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Talbot, H.F. Lxxvi. Facts Relating to Optical Science. No. Iv. Lond. Edinb. Philos. Mag. J. Sci. 1836, 9, 401–407. [Google Scholar] [CrossRef] [Green Version]
- Rayleigh, L. On Copying Diffraction-Gratings, and on Some Phenomena Connected Therewith. Phil. Mag. 1881, 11, 196–205. [Google Scholar] [CrossRef] [Green Version]
- Winthrop, J.T.; Worthington, C.R. Theory of Fresnel Images. I. Plane Periodic Objects in Monochromatic Light. J. Opt. Soc. Am. 1965, 55, 373–381. [Google Scholar] [CrossRef]
- Montgomery, W.D. Self-Imaging Objects of Infinite Aperture. J. Opt. Soc. Am. 1967, 57, 772–778. [Google Scholar] [CrossRef]
- Berry, M.V.; Klein, S. Integer, Fractional and Fractal Talbot Effects. J. Mod. Opt. 1996, 43, 2139–2164. [Google Scholar] [CrossRef]
- Saastamoinen, T.; Tervo, J.; Vahimaa, P.; Turunen, J. Exact self-imaging of transversely periodic fields. J. Opt. Soc. Am. A 2004, 21, 1424–1429. [Google Scholar] [CrossRef] [PubMed]
- Bryngdahl, O. Image formation using self-imaging techniques. J. Opt. Soc. Am. 1973, 63, 416–419. [Google Scholar] [CrossRef]
- Ulrich, R. Image formation by phase coincidences in optical waveguides. Opt. Commun. 1975, 13, 259–264. [Google Scholar] [CrossRef]
- Soldano, L.B.; Pennings, E.C.M. Optical multi-mode interference devices based on self-imaging: Principles and applications. J. Light. Technol. 1995, 13, 615–627. [Google Scholar] [CrossRef] [Green Version]
- Okamoto, K. Fundamentals of Optical Waveguides; Academic Press: London, UK, 2006. [Google Scholar]
- Mohammed, W.S.; Mehta, A.; Johnson, E.G. Wavelength Tunable Fiber Lens Based on Multimode Interference. J. Light. Technol. 2004, 22, 469–477. [Google Scholar] [CrossRef]
- Mohammed, W.S.; Smith, P.W.E.; Gu, X. All-fiber multimode interference bandpass filter. Opt. Lett. 2006, 31, 2547–2549. [Google Scholar] [CrossRef]
- May-Arrioja, D.A.; Antonio-Lopez, J.E.; Sánchez-Mondragón, J.J.; LiKamWa, P. Tunable Lasers Based on Multimode Interference Effects. In Advanced Lasers; Springer: Cham, Switzerland, 2015; pp. 19–33. [Google Scholar]
- Wang, K.; Dong, X.; Kohler, M.H.; Kienle, P.; Bian, Q.; Jakobi, M.; Koch, A.W. Advances in Optical Fiber Sensors Based on Multimode Interference (MMI): A Review. IEEE Sens. J. 2021, 21, 132–142. [Google Scholar] [CrossRef]
- Wang, Q.; Gerald, F.; Wei, Y. Investigation on Single-Mode–Multimode–Single-Mode Fiber Structure. J. Lightwave Technol. 2008, 26, 512–519. [Google Scholar] [CrossRef]
- Xu, W.; Shi, J.; Yang, X.; Xu, D.; Rong, F.; Zhao, J.; Yao, J. Improved Numerical Calculation of the Single-Mode-No-Core-Single-Mode Fiber Structure Using the Fields Far from Cutoff Approximation. Sensors 2017, 17, 2240. [Google Scholar] [CrossRef] [Green Version]
- Zheng, J.; Li, J.; Ning, T.; Pei, L.; Jian, S.; Wen, Y. Improved self-imaging for multi-mode optical fiber involving cladding refractive index. Opt. Commun. 2013, 311, 350–353. [Google Scholar] [CrossRef]
- Castillo-Guzman, A.; Antonio-Lopez, J.E.; Selvas-Aguilar, R.; May-Arrioja, D.A.; Estudillo-Ayala, J.; LiKamWa, P. Widely Tunable Erbium-Doped Fiber Laser Based on Multimode Interference Effect. Opt. Express 2010, 18, 591–597. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, Q.; Semenova, Y.; Wang, P.; Farrell, G. High sensitivity SMS fiber structure based refractometer—Analysis and experiment. Opt. Express 2011, 19, 7937–7944. [Google Scholar] [CrossRef] [PubMed]
- Ma, L.; Qi, Y.; Kang, Z.; Bai, Y.; Jian, S. Tunable fiber laser based on the refractive index characteristic of MMI effects. Opt. Laser Technol. 2014, 57, 96–99. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhao, J.; Zhao, Q. Review of no-core optical fiber sensor and applications. Sens. Actuators A Phys. 2020, 313, 112160. [Google Scholar] [CrossRef]
- Wu, Q.; Qu, Y.; Liu, J.; Yuan, J.; Wan, S.-P.; Wu, T.; He, X.-D.; Liub, B.; Liuc, D.; Ma, Y.; et al. Singlemode-Multimode-Singlemode Fiber Structures for Sensing Applications—A Review. IEEE Sens. J. 2020, 1. [Google Scholar] [CrossRef]
- Sun, A.; Semenova, Y.; Farrell, G. A novel highly sensitive optical fiber microphone based on single mode-multimode-single mode structure. Microw. Opt. Technol. Lett. 2010, 53, 442–445. [Google Scholar] [CrossRef]
- Wu, Q.; Yang, M.; Yuan, J.; Chan, H.P.; Ma, Y.; Semenova, Y.; Wang, P.; Yu, C.; Farrell, G. The use of a bend singlemode–multimode–singlemode (SMS) fibre structure for vibration sensing. Opt. Laser Technol. 2014, 63, 29–33. [Google Scholar] [CrossRef]
- Guzman-Sepulveda, J.R.; Hernandez-Romano, I.; Torres-Cisneros, M.; May-Arrioja, D.A. Fiber Optic Vibration Sensor Based on Multimode Interference Effects. In CLEO: Applications and Technology; Optical Society of America: Washington, DC, USA, 2012. [Google Scholar]
- Zhao, Y.; Li, X.-G.; Meng, F.-C.; Zhao, Z. A vibration-sensing system based on SMS fiber structure. Sens. Actuators A Phys. 2014, 214, 163–167. [Google Scholar] [CrossRef]
- Ran, Y.; Xia, L.; Han, Y.; Li, W.; Rohollahnejad, J.; Wen, Y.; Liu, D. Vibration Fiber Sensors Based on SM-NC-SM Fiber Structure. IEEE Photon. J. 2015, 7, 1–7. [Google Scholar] [CrossRef]
- Waluyo, T.B.; Bayuwati, D. An Sms (Single Mode–Multi Mode–Single Mode) Fiber Structure for Vibration Sensing. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2017. [Google Scholar]
- Gao, R.; Wang, H.; Zhu, D.; Fan, G.; Yan, H.; Wang, P.; Liu, Y.; Wang, Y.; Liu, W.; Song, L.; et al. Acoustic frequency vibration sensor based on tapered SMS fiber structure. Sens. Actuators A Phys. 2018, 271, 243–250. [Google Scholar] [CrossRef]
- Gao, R.; Wang, H.; Zhu, D.; Fan, G.; Jiao, W.; Liang, C.; Liu, Y.; Wang, Y.; Liu, W.; He, X.; et al. Sensitivity enhancement of optical fiber vibration sensor through encapsulation of acoustic Helmholtz resonator. Optik 2018, 169, 33–40. [Google Scholar] [CrossRef]
- Chaganti, L.G.P.K.; Ahmad, M.H.; Piah, M.A.M.; Noor, M.Y.M.; Azmi, A.I. Fiber Optic Acoustic Sensor Based on SMS Structure With Thin Polymer Diaphragm for Partial Discharge Detection. IEEE Access 2020, 8, 188044–188055. [Google Scholar] [CrossRef]
- Irawati, N.; Hatta, A.M.; Yhuwana, Y.G.Y. Sekartedjo Heart Rate Monitoring Sensor Based on Singlemode-Multimode-Singlemode Fiber. Photon. Sens. 2019, 10, 186–193. [Google Scholar] [CrossRef] [Green Version]
- Hah, D.; Yoon, E.; Hong, S. An Optomechanical Pressure Sensor Using Multimode Interference Couplers. Jpn. J. Appl. Phys. 1999, 38, 2664–2668. [Google Scholar] [CrossRef]
- Hah, D.; Yoon, E.; Hong, S. An optomechanical pressure sensor using multimode interference couplers with polymer waveguides on a thin p+-Si membrane. Sens. Actuators A Phys. 2000, 79, 204–210. [Google Scholar] [CrossRef]
- Ruiz-Pérez, V.I.; Basurto-Pensado, M.A.; Urquiza-Beltrán, G.; May-Arrioja, D.A.; Gasca-Herrera, E.; Mondragón, J.J.S.; LiKamWa, P.L. Optical Fiber Sensor for Pressure Based on Multimode Interference as Sensitive Element. In Proceedings of the Latin America Optics and Photonics Conference, Recife, Brazil, 27–30 September 2010. [Google Scholar]
- Mejía-Aranda, A.R.; Ruiz-Perez, V.I.; Basurto-Pensado, M.A.; Antúnez-Cerón, E.E.; May-Arrioja, D.A.; LiKamWa, P.; Sanchez-Mondragon, J.J. Design of a Pressure Sensor of 0–7 Bar in Fiber Optic Using Mmi Methodology. Optik 2013, 124, 5927–5929. [Google Scholar] [CrossRef]
- Ruiz-Pérez, V.I.; Basurto-Pensado, M.A.; LiKamWa, P.; Sánchez-Mondragón, J.J.; May-Arrioja, D.A. Fiber Optic Pressure Sensor Using Multimode Interference. In Journal of Physics-Conference Series; IOP Publishing: Bristol, UK, 2011. [Google Scholar]
- May-Arrioja, D.A.; Ruiz-Perez, V.I.; Bustos-Terrones, Y.; Basurto-Pensado, M.A. Fiber Optic Pressure Sensor Using a Conformal Polymer on Multimode Interference Device. IEEE Sens. J. 2015, 16, 1956–1961. [Google Scholar] [CrossRef]
- Lin, W.; Miao, Y.; Zhang, H.; Liu, B.; Liu, Y.; Song, B. Fiber-optic in-line magnetic field sensor based on the magnetic fluid and multimode interference effects. Appl. Phys. Lett. 2013, 103, 151101. [Google Scholar] [CrossRef]
- Wang, H.; Pu, S.; Wang, N.; Dong, S.; Huang, J. Magnetic field sensing based on singlemode–multimode–singlemode fiber structures using magnetic fluids as cladding. Opt. Lett. 2013, 38, 3765–3768. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Han, Q.; Liu, T.; Lan, X.; Xiao, H. Optical fiber magnetic field sensor based on single-mode–multimode–single-mode structure and magnetic fluid. Opt. Lett. 2013, 38, 3999–4001. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Liu, T.; Han, Q.; Chen, Y.; Li, L. U-bent single-mode–multimode–single-mode fiber optic magnetic field sensor based on magnetic fluid. Appl. Phys. Express 2014, 7, 072501. [Google Scholar] [CrossRef]
- Ascorbe, J.; Corres, J.M.; Arregui, F.J.; Matias, I.R. Magnetic field sensor based on a single mode-multimode-single mode optical fiber structure. In 2015 IEEE SENSORS; IEEE: Greenvile, SC, USA, 2015; pp. 1–4. [Google Scholar]
- Torres-Díaz, I.; Rinaldi, C. Recent progress in ferrofluids research: Novel applications of magnetically controllable and tunable fluids. Soft Matter 2014, 10, 8584–8602. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Sun, L.; Yu, Y.; Zhao, Y. Flexible Ferrofluids: Design and Applications. Adv. Mater. 2019, 31, e1903497. [Google Scholar] [CrossRef]
- Li, L.; Han, Q.; Chen, Y.; Liu, T.; Zhang, R. An All-Fiber Optic Current Sensor Based on Ferrofluids and Multimode Interference. IEEE Sens. J. 2014, 14, 1749–1753. [Google Scholar]
- Li, L.; Han, Q.; Liu, T.; Chen, Y.; Zhang, R. Reflective all-fiber current sensor based on magnetic fluids. Rev. Sci. Instrum. 2014, 85, 83107. [Google Scholar] [CrossRef]
- Hatta, A.M.; Semenova, Y.; Rajan, G.; Farrell, G. A voltage sensor based on a singlemode-multimode-singlemode fiber structure. Microw. Opt. Technol. Lett. 2010, 52, 1887–1890. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Jin, Y.; Liang, H.; Dong, X.; Wang, J. All-fiber-optic sensor for relative humidity measurement. In Proceedings of the Proceedings of 2011 International Conference on Electronics and Optoelectronics, Dalian, China, 29–31 July 2011. [Google Scholar]
- Xia, L.; Li, L.; Li, W.; Kou, T.; Liu, D. Novel optical fiber humidity sensor based on a no-core fiber structure. Sens. Actuators A Phys. 2013, 190, 1–5. [Google Scholar] [CrossRef]
- An, J.; Zhao, Y.; Jin, Y.; Shen, C. Relative humidity sensor based on SMS fiber structure with polyvinyl alcohol coating. Optik 2013, 124, 6178–6181. [Google Scholar] [CrossRef]
- An, J.; Jin, Y.; Sun, M.; Dong, X. Relative Humidity Sensor Based on SMS Fiber Structure With Two Waist-Enlarged Tapers. IEEE Sens. J. 2014, 14, 2683–2686. [Google Scholar] [CrossRef]
- Miao, Y.; Ma, X.; He, Y.; Zhang, H.; Zhang, H.; Song, B.; Liu, B.; Yao, J. Low-temperature-sensitive relative humidity sensor based on tapered square no-core fiber coated with SiO2 nanoparticles. Opt. Fiber Technol. 2016, 29, 59–64. [Google Scholar] [CrossRef]
- Xu, W.; Shi, J.; Yang, X.; Xu, D.; Rong, F.; Zhao, J.; Yao, J. Relative Humidity Sensor Based on No-Core Fiber Coated by Agarose-Gel Film. Sensors 2017, 17, 2353. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Farrell, G.; Lewis, E.; Tian, K.; Yuan, L.; Wang, P. A Humidity Sensor Based on a Singlemode-Side Polished Multimode–Singlemode Optical Fibre Structure Coated with Gelatin. J. Light. Technol. 2017, 35, 4087–4094. [Google Scholar] [CrossRef]
- Li, S.; Li, X.; Yang, J.; Zhou, L.; Che, X.; Binbin, L. Novel Reflection-type Optical Fiber Methane Sensor Based on a No-core Fiber Structure. Mater. Today Proc. 2016, 3, 439–442. [Google Scholar] [CrossRef]
- Feng, W.-L.; Yang, X.-Z.; He, Z.; Liu, M. Hydrogen sulfide gas sensor based on TiO2–ZnO composite sensing membrane-coated no-core fiber. J. Phys. D Appl. Phys. 2021, 54, 135105. [Google Scholar] [CrossRef]
- Mazingue, T.; Kribich, R.; Etienne, P.; Moreau, Y. Simulations of refractive index variation in a multimode interference coupler: Application to gas sensing. Opt. Commun. 2007, 278, 312–316. [Google Scholar] [CrossRef]
- Szewczuk, A.; Błahut, M. MMI Structures Covered by Bromocresol Purple for Ammonia Detection. Acta Phys. Pol. A 2013, 124, 570–573. [Google Scholar] [CrossRef]
- Hatta, A.M.; Farrell, G.; Wang, Q.; Rajan, G.; Wang, P.; Semenova, Y. Ratiometric wavelength monitor based on singlemode-multimode-singlemode fiber structure. Microw. Opt. Technol. Lett. 2008, 50, 3036–3039. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Farrell, G. Multimode-fiber-based edge filter for optical wavelength measurement application and its design. Microw. Opt. Technol. Lett. 2006, 48, 900–902. [Google Scholar] [CrossRef]
- Huang, J.; Lan, X.; Wang, H.; Yuan, L.; Wei, T.; Gao, Z.; Xiao, H. Polymer optical fiber for large strain measurement based on multimode interference. Opt. Lett. 2012, 37, 4308–4310. [Google Scholar] [CrossRef]
- Numata, G.; Hayashi, N.; Tabaru, M.; Mizuno, Y.; Nakamura, K. Ultra-Sensitive Strain and Temperature Sensing Based on Modal Interference in Perfluorinated Polymer Optical Fibers. IEEE Photon. J. 2014, 6, 1–7. [Google Scholar] [CrossRef]
- Numata, G.; Hayashi, N.; Tabaru, M.; Mizuno, Y.; Nakamura, K. Strain and temperature sensing based on multimode interference in partially chlorinated polymer optical fibers. IEICE Electron. Express 2015, 12, 20141173. [Google Scholar] [CrossRef] [Green Version]
- Numata, G.; Hayashi, N.; Tabaru, M.; Mizuno, Y.; Nakamura, K. Drastic sensitivity enhancement of temperature sensing based on multimodal interference in polymer optical fibers. Appl. Phys. Express 2015, 8, 72502. [Google Scholar] [CrossRef]
- Kawa, T.; Numata, G.; Lee, H.; Hayashi, N.; Mizuno, Y.; Nakamura, K. Single-end-access strain and temperature sensing based on multimodal interference in polymer optical fibers. IEICE Electron. Express 2017, 14, 20161239. [Google Scholar] [CrossRef] [Green Version]
- Kawa, T.; Numata, G.; Lee, H.; Hayashi, N.; Mizuno, Y.; Nakamura, K. Temperature sensing based on multimodal interference in polymer optical fibers: Room-temperature sensitivity enhancement by annealing. Jpn. J. Appl. Phys. 2017, 56, 78002. [Google Scholar] [CrossRef]
- Mizuno, Y.; Hagiwara, S.; Kawa, T.; Lee, H.; Nakamura, K. Displacement sensing based on modal interference in polymer optical fibers with partially applied strain. Jpn. J. Appl. Phys. 2018, 57, 058002. [Google Scholar] [CrossRef]
- Leal-Junior, A.; Díaz, C.; Frizera, A.; Lee, H.; Nakamura, K.; Mizuno, Y.; Marques, C. Highly Sensitive Fiber-Optic Intrinsic Electromagnetic Field Sensing. Adv. Photon. Res. 2021, 2, 2000078. [Google Scholar] [CrossRef]
- Missinne, J.; Kalathimekkad, S.; Van Hoe, B.; Bosman, E.; Vanfleteren, J.; Van Steenberge, G. Stretchable optical waveguides. Opt. Express 2014, 22, 4168–4179. [Google Scholar] [CrossRef] [Green Version]
- Guo, J.; Liu, X.; Jiang, N.; Yetisen, A.K.; Yuk, H.; Yang, C.; Khademhosseini, A.; Zhao, X.; Yun, S.-H. Highly Stretchable, Strain Sensing Hydrogel Optical Fibers. Adv. Mater. 2016, 28, 10244–10249. [Google Scholar] [CrossRef]
- Harnett, C.K.; Zhao, H.; Shepherd, R.F. Stretchable Optical Fibers: Threads for Strain-Sensitive Textiles. Adv. Mater. Technol. 2017, 2, 1700087. [Google Scholar] [CrossRef]
- Leber, A.; Cholst, B.; Sandt, J.; Vogel, N.; Kolle, M. Stretchable Thermoplastic Elastomer Optical Fibers for Sensing of Extreme Deformations. Adv. Funct. Mater. 2018, 29, 1802629. [Google Scholar] [CrossRef]
- Tripathi, S.M.; Kumar, A.; Kumar, M.; Bock, W.J. Temperature-insensitive fiber-optic devices using multimode interference effect. Opt. Lett. 2012, 37, 4570–4572. [Google Scholar] [CrossRef] [Green Version]
- Tripathi, S.M.; Kumar, A.; Kumar, M.; Bock, W.J. Temperature insensitive single-mode–multimode–single-mode fiber optic structures with two multimode fibers in series. Opt. Lett. 2014, 39, 3340–3343. [Google Scholar] [CrossRef]
- Ruiz-Perez, V.I.; May-Arrioja, D.A.; Guzman-Sepulveda, J.R. Passive athermalization of multimode interference devices for wavelength-locking applications. Opt. Express 2017, 25, 4800. [Google Scholar] [CrossRef] [PubMed]
- Ruiz-Perez, V.I.; Velasco-Bolom, P.M.; May-Arrioja, D.A.; Guzman-Sepulveda, J.R. Measuring the Thermo-Optic Coefficient of Liquids with Athermal Multimode Interference Devi Ces. In IEEE Sensors Journal; IEEE: Greenvile, SC, USA, 2020. [Google Scholar]
- Ruiz-Perez, V.I.; May-Arrioja, D.A.; Guzman-Sepulveda, J.R. An All-Solid Athermal Multimode-Interference Cascaded Device for Wavelength-Locking. IEEE Photonics Technol. Lett. 2018, 30, 669–672. [Google Scholar] [CrossRef]
- Guzman-Sepulveda, J.R.; Dogariu, A. Multimode Interference Dynamic Light Scattering. Opt. Lett. 2018, 43, 4232–4235. [Google Scholar] [CrossRef] [PubMed]
- Mason, T.G. Estimating the viscoelastic moduli of complex fluids using the generalized Stokes-Einstein equation. Rheol. Acta 2000, 39, 371–378. [Google Scholar] [CrossRef]
- Guzman-Sepulveda, J.R.; Dogariu, A. Probing Complex Dynamics with Spatiotemporal Coherence-Gated Dls. Appl. Opt. 2019, 58, D76–D90. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Liu, D.; Kumar, R.; Ng, W.P.; Fu, Y.-Q.; Yuan, J.; Yu, C.; Wu, Y.; Zhou, G.; Farrell, G.; et al. A simple optical fiber interferometer based breathing sensor. Meas. Sci. Technol. 2017, 28, 035105. [Google Scholar] [CrossRef] [Green Version]
- Socorro, A.B.; Santamaria, E.; Fernandez-Irigoyen, J.; Del Villar, I.; Corres, J.M.; Arregui, F.J.; Matias, I.R. Fiber-Optic Immunosensor Based on an Etched SMS Structure. IEEE J. Sel. Top. Quantum Electron. 2017, 23, 314–321. [Google Scholar] [CrossRef]
- Trouillet, A.; Ronot-Trioli, C.; Veillas, C.; Gagnaire, H. Chemical sensing by surface plasmon resonance in a multimode optical fibre. Pure Appl. Opt. J. Eur. Opt. Soc. Part A 1996, 5, 227–237. [Google Scholar] [CrossRef]
- Roh, S.; Chung, T.; Lee, B. Overview of the Characteristics of Micro- and Nano-Structured Surface Plasmon Resonance Sensors. Sensors 2011, 11, 1565–1588. [Google Scholar] [CrossRef] [Green Version]
- MMao, P.; Luo, Y.; Chen, X.; Fang, J.; Huang, H.; Chen, C.; Peng, S.; Zhang, J.; Tang, J.; Lu, H.; et al. Design and optimization of multimode fiber sensor based on surface plasmon resonance. In Numerical Simulation of Optoelectronic Devices; IEEE: Greenvile, SC, USA, 2014; pp. 119–120. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Year | Measurement Range | Sensitivity |
|---|---|---|---|
| [35] | 2010 | 0–140 psi (0–965.27 kPa) | 4 mV/psi |
| [37] | 2011 | 0–60 psi (0–413.68 kPa) | 3 μV/psi |
| [36] | 2013 | 0–7 bar (700 kPa, 101 psi) | 56 mV/bar (3.86 mV/psi) (0–2.5 bar; 0–37 psi) 22 mV/bar (1.52 mV/psi) (2.5–7 bar; 37–100 psi) |
| [38] | 2016 | 0–960 kPa (0–140 psi) | −0.145 × 10−3 mW/kPa |
| Ref. | Year | Range | Sensitivity |
|---|---|---|---|
| [39] | 2013 | 0–500 Oe (0–50 mT) | −0.01939 dB/Oe (−0.1939 dB/mT) |
| [40] | 2013 | 0–450 Oe (0–45 mT) | −16.86 pm/Oe (−168.6 pm/mT) |
| [41] | 2013 | 0–220 Oe (0–22 mT) | 90.5 pm/Oe (905 pm/mT) 0.748 dB/mT |
| [42] | 2014 | 0–100 Oe (0–10 mT) | 275.7 pm/mT (straight; 0–5 mT) 742.9 pm/mT (straight; 5–10 mT) 3185.2 pm/mT (U-bend; 2–10 mT) |
| [43] | 2015 | 0–330 mT | 1.45 dB/T 6 nm/T |
| Ref. | Year | Range | Sensitivity |
|---|---|---|---|
| [49] | 2011 | 80–89%RH | 0.18 nm/%RH |
| [50] | 2013 | 40–90%RH | 0.015768 dB/%RH (0.5 cm NCF) 0.1359 dB/%RH (1.0 cm NCF) 0.196 dB/%RH (2.0 cm NCF) |
| [51] | 2013 | 30–80%RH | 0.09 nm/%RH 0.3 dB/%RH |
| [52] | 2014 | 35–85%RH | 0.139 nm/%RH (dip A) 0.223 nm/%RH (dip B) |
| [53] | 2016 | 43.6–98.6%RH 83–96.6%RH | 456.21 pm/%RH (dip A) 584.2 pm/%RH (dip B) |
| [54] | 2017 | 30–75%RH | −149 pm/%RH −0.075 dB/%RH |
| [55] | 2017 | 40–90%RH | 0.14 dB/%RH |
| Ref | Variable | Range | Sensitivity |
|---|---|---|---|
| [62] | Strain | 0–20,000 με | −1.73 pm/με |
| [63] | Strain Temperature | 100–500 με 26–27 °C | −112 pm/με −49.8 nm/°C |
| [64] | Strain Temperature | 0–1000 με 27–28 °C | −4.47 pm/με −6.76 nm/°C |
| [65] | Temperature | 10–70 °C | +7.7 nm/°C (at RT) +202 nm/°C (around 70 °C) |
| [66] | Strain Temperature | 50–300 με 36–37.5 °C | −121.8 pm/με (transmission) −122.2 pm/με (reflection) +9.63 nm/°C (transmission) +10.1 nm/°C (reflection) |
| [67] | Temperature | 24–30 °C | +2.17 nm/°C (annealed) +0.75 nm/°C (native) |
| [68] | Strain | 0–540 με | −48 pm/με |
| [69] | Magnetic field | 0–240 mT | 113.5 pm/mT |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guzmán-Sepúlveda, J.R.; Guzmán-Cabrera, R.; Castillo-Guzmán, A.A. Optical Sensing Using Fiber-Optic Multimode Interference Devices: A Review of Nonconventional Sensing Schemes. Sensors 2021, 21, 1862. https://doi.org/10.3390/s21051862
Guzmán-Sepúlveda JR, Guzmán-Cabrera R, Castillo-Guzmán AA. Optical Sensing Using Fiber-Optic Multimode Interference Devices: A Review of Nonconventional Sensing Schemes. Sensors. 2021; 21(5):1862. https://doi.org/10.3390/s21051862
Chicago/Turabian StyleGuzmán-Sepúlveda, José Rafael, Rafael Guzmán-Cabrera, and Arturo Alberto Castillo-Guzmán. 2021. "Optical Sensing Using Fiber-Optic Multimode Interference Devices: A Review of Nonconventional Sensing Schemes" Sensors 21, no. 5: 1862. https://doi.org/10.3390/s21051862
APA StyleGuzmán-Sepúlveda, J. R., Guzmán-Cabrera, R., & Castillo-Guzmán, A. A. (2021). Optical Sensing Using Fiber-Optic Multimode Interference Devices: A Review of Nonconventional Sensing Schemes. Sensors, 21(5), 1862. https://doi.org/10.3390/s21051862