
Drone Secure Communication Protocol for Future Sensitive Applications in Military Zone

 and
and 
Abstract
:1. Introduction
- A new protocol for UAV-to-UAV and UAV-to-GCS is proposed,
- A formal security analysis of the proposed protocol using BAN-logic and Scyther tool is carried out,
- A detailed comparative analysis based on security property and computational overhead between the proposed and existing protocols is given,
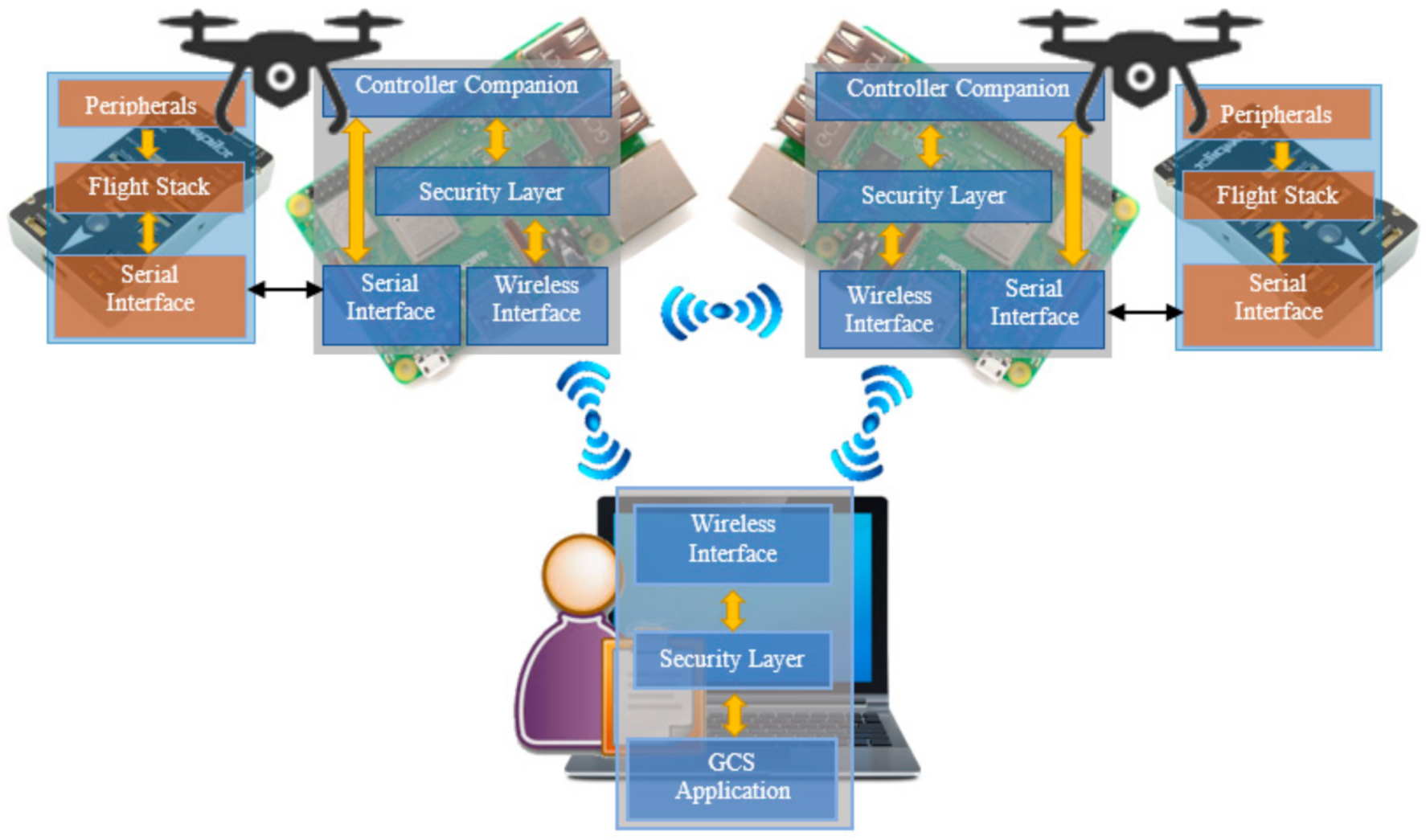
- The protocol is also implemented on a real UAV (powered by Raspberry Pi) and a Linux-based ground control station.
- The remainder of the paper is organized as follows: In Section 2, the state-of-the-art study of existing drone communication protocols is described. In Section 3 and Section 4, the proposed protocol is presented in detail, and a formal security analysis of the protocol is provided, respectively. In the final three sections, performance analysis, simulation results, and conclusion of the paper are provided, respectively.
2. Related Works
3. The Proposed Protocol
3.1. Preliminary
3.2. Threat Model
- Mutual Authentication: for secure communication among a drone, a monitoring drone, and a GCS, the communicating entities need to authenticate each other mutually.
- Strong Key Exchange: in order to assure the perfect forward secrecy of the protocol, a strong key exchange should be executed in a way that generated session keys cannot be recovered.
- Confidentiality: the information exchanged between the drones and between the drone and the GCS should be protected from being accessed by unauthorized parties.
- Integrity: it is critical to assure the authenticity of the information (that the information is not changed in between, and the source of information is genuine) exchanged between the communicating ends.
- Non-repudiation: one of the essential security requirements in such scenarios is to make sure that the action done by one party cannot be successfully denied without others knowing about it.
- Perfect Forward Secrecy: this property assures communicating parties that even if an adversary discloses a master key, old session keys will not be compromised.
- Perfect Backward Secrecy: this property assures the communicating entities that even if an adversary discloses a master key, future session keys will not be compromised.
- Protection against Denial of Service: legitimate users, such as legitimate drones, should not be denied service from a service provider, such as a GCS.
- Protection against MITM (Man-In-The-Middle) attack: the protocol prevents an attacker from secretly relaying messages between the communicating ends.
3.3. SP-D2GCS
- (1)
- The first thing that happens in the SP-D2GCS protocol is for D to get the operation ID (IDMISSION) and PIN (P) from the user. While doing so, or even before the actual protocol session starts, it can generate a random ECDH private key dD ∈ {1… n − 1}, where n is the order of the group generated by G. It then calculates the ECDH public key QD = dD • G. Now, D is ready to create a message M1, containing IDMISSION, its certificate (CERTD), the computed public key QD, and the current timestamp ts1, which is accompanied with the signature S1 computed by the ECDSA private key PR(D). To allow GCS to prevent the resource exhaustion attacks caused by the expensive public key operation, an HMAC is computed over the message M1 and signature S1 using the PIN number, P. Finally, the message M1, with the signature S1 and the message digest, is sent to GCS.
- (2)
- Upon receiving the message, GCS first checks its freshness by checking the included timestamp ts1. Once ts1 is in the acceptable threshold, it then computes HM(P, M1||S1), which is then compared with the received HMAC value. Note that doing two such verifications before the expensive public key operation, i.e., the S1 verification, helps to defend against resource exhaustion denial of service attacks. In a positive case, GCS checks the validity of the received certificate CERTD and verifies the digital signature S1 by using the public key that belongs to CERTD. If the verification of S1 holds, GCS successfully authenticates D. Now, GCS uses the same procedure D followed to prepare the ECDH private key (dGCS) and public key (QGCS = dGCS • G). It then computes the master session key MSKD-GCS = dGCS•dD•G to produce the encryption and authentication keys. While the encryption key EKD-GCS (=HM(MSKD-GCS, “D-GCS Encryption Key”||ts1)) is used to protect the confidentiality of the command CMD sent to D, the authentication key AKD-GCS (=HM(MSKD-GCS, “D-GCS Authentication Key”||ts1)) assures the authenticity and integrity of this command. GCS then arranges a message M2 (containing IDMISSION, CERTGCS, QGCS, and ts2) and signs that message with its ECDSA private key PR(GCS), followed by encrypting the command CMD with the encryption key EKD-GCS and computing HM(AKD-GCS, M2|| E(EKD-GCS, CMD)). Finally, GCS sends the message M2, the signature S2, the encrypted command, and the HMAC value to D.
- (3)
- Once D gets the message, it verifies the timestamp ts2 and the digital signature S2 to authenticate GCS. Next, it generates the master session key MSKD-GCS, from which the encryption and authentication keys EKD-GCS and AKD-GCS are derived using the same procedure as shown in step (2). Afterward, D computes the HMAC value and verifies if it is the same as the one it received. In turn, it extracts the operation command CMD by decrypting the received cipher using EKD-GCS. To proceed with the next step, D further composes a message M3 (containing IDMISSION, IDD, IDGCS, and ts3), concatenates it with the deciphered CMD, and signs the result by computing S(PR(D), M3||CMD). It also calculates HM(AKD-GCS, M3||S3), which is, in turn, sent together with the message M3 and the digital signature S3 to GCS.
- (4)
- Upon receipt of the message, GCS verifies the timestamp ts3 and the HMAC value before confirming the validity of the digital signature S3. If S3 is valid, GCS can be sure that D has successfully received the operation command CMD. S3 also plays an important role in fulfilling the non-repudiation property of the protocol by making sure that D cannot deny that it received the CMD. Similarly, GCS allows D to prove that it has sent an operation command CMD via the digital signature S4 (=S(PR(GCS), M4||CMD)). Besides, the HMAC value is calculated based on AKD-GCS to counter the threat of the resource exhaustion attacks due to the public key operation. Note that in the SP-D2GCS protocol, GCS computes and transmits optional parameters that will be used for scenarios where drones communicate with their monitoring drone. In such scenarios, it prepares for a ticket that contains a session key SK and its lifetime LT along with the IDs of D and its monitoring drone MD. In more detail, GCS computes ENC(D) = E(EKD-GCS, IDD||IDMD||IDGCS||SK||LT||ts4) and ST(D) = E(EKGCS-MD, IDMISSION||IDD||IDMD||IDGCS||SK||LT||ts4) for D and MD, respectively. Finally, the GCS sends the message M4 (optionally including ENC(D) and ST(D)), the digital signature S4, and the HMAC value. The protocol is concluded after D validates the included ts4, HMAC value, and S4, respectively. Similar to S3, S4 supports non-repudiation. If ENC(D) and ST(D) are given, D recovers the session key SK by decrypting ENC(D) with EKD-GCS.
3.4. SP-D2MD
- (1)
- Note that during the D2GCS protocol session, D received the session key SK and the corresponding ticket ST(D) that allow itself to execute mutual authentication and key exchange with MD. To start this protocol, D first generates its ECDH public key pair dD and QD, before composing a message M1 containing IDMISSION, IDGCS, ST(D), IDD, QD, and ts1. It, in turn, calculates HM(SK, M1), which is sent to MD along with M1.
- (2)
- On receiving the message, MD verifies its freshness and decrypts ST(D) with EKGCS-MD to extract SK, which is then used to verify the received HM(SK, M1). After that, it generates the ECDH public key pair dMD and QMD, computes a master session key MSKD-MD, and computes EKD-MD and AKD-MD. Finally, D generates the two HMAC values, HM(AKD-MD, M2) and HM(SK, M2|| HM(AKD-MD, M2)), which are then sent to MD along with M2.
- (3)
- After verifying the received ts2 and HM(SK, M2|| HM(AKD-MD, M2)), D computes MSKD-MD, EKD-MD, and AKD-MD. With AKD-MD, HM(AKD-MD, M2) is verified, followed by sending MD a message M3 (= IDMISSION, IDD, IDMD, ts3) with HM(AKD-MD, M3). Finally, MD concludes this protocol by verifying the included ts3 and HM(AKD-MD, M3). The positive result enables MD to confirm the valid key exchange.
4. Formal Security Analysis
4.1. Formal Verification with BAN-Logic
4.1.1. SP-D2GCS
- 1.
- Idealization
- (I1)
- (I2)
- (I3)
- (I4)
- 2.
- Assumptions
- (A1)
- (A2)
- (A3)
- (A4)
- (A5)
- (A6)
- (A7)
- (A8)
- (A9)
- (A10)
- 3.
- Goals
- (G1)
- (G2)
- (G3)
- (G4)
- (G5)
- (G6)
- (G7)
- (G8)
- (G9)
- (G10)
- (G11)
- (G12)
- (G13)
- (G14)
- (G15)
- (G16)
- 4.
- Derivations
- (D1)
- (D2)
- (D3)
- (D4)
- (D5)
- (D6)
- (D7)
- (D8)
- (D9)
- (D10)
- (D11)
- (D12)
- (D13)
- (D14)
- (D15)
- (D16)
- (D17)
- (D18)
- (D19)
- (D20)
- (D21)
- (D22)
- (D23)
- (D24)
- (D25)
- (D26)
- (D27)
- (D28)
- (D29)
- (D30)
- (D31)
- (D32)
- (D33)
4.1.2. SP-D2MD
- 1.
- Idealization
- (I1)
- (I2)
- (I3)
- 2.
- Assumptions
- (A1)
- (A2)
- (A3)
- (A4)
- (A5)
- (A6)
- (A7)
- 3.
- Goals
- (G1)
- (G2)
- (G3)
- (G4)
- (G5)
- (G6)
- (G7)
- (G8)
- (G9)
- (G10)
- (G11)
- (G12)
- (G13)
- (G14)
- 4.
- Derivations
- (D1)
- (D2)
- (D3)
- (D4)
- (D5)
- (D6)
- (D7)
- (D8)
- (D9)
- (D10)
- (D11)
- (D12)
- (D13)
- (D14)
- (D15)
- (D16)
- (D17)
- (D18)
- (D19)
- (D20)
- (D21)
- (D22)
- (D23)
- (D24)
- (D25)
- (D26)
- (D27)
4.2. Formal Verification with Scyther
5. Performance Analysis
6. Simulation Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Vergouw, B.; Nagel, H.; Bondt, G.; Custers, B. Drone technology: Types, payloads, applications, frequency spectrum issues and future developments. In The Future of Drone Use; TMC Asser Press: The Hague, The Netherlands, 2016; pp. 21–45. [Google Scholar]
- Naqvi, S.A.; Hassan, S.A.; Pervaiz, H.; Ni, Q. Drone-aided communication as a key enabler for 5G and resilient public safety networks. IEEE Commun. Mag. 2018, 56, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Livingston, S.J.; Chandan, P.H.; Simeon, R.S.; Vikas, B. D-ARCH: A Detailed Analysis of Drone Challenges Policy Enforcements and Security Solutions. J. Comput. Theor. Nanosci. 2018, 15, 2842–2847. [Google Scholar] [CrossRef]
- Ismail, M.A.; Bierig, A. Identifying drone-related security risks by a laser vibrometer-based payload identification system. In Proceedings of the Laser Radar Technology and Applications XXIII, Orlando, FL, USA, 10 May 2018; Volume 10636, p. 1063603, International Society for Optics and Photonics. [Google Scholar]
- Bunse, C.; Plotz, S. Security analysis of drone communication protocols. In Proceedings of the International Symposium on Engineering Secure Software and Systems, Paris, France, 26–27 June 2018; Springer: Cham, Switzerland, 2018; pp. 96–107. [Google Scholar]
- Choudhary, G.; Sharma, V.; You, I. Sustainable and secure trajectories for the military Internet of Drones (IoD) through an efficient Medium Access Control (MAC) protocol. Comput. Electr. Eng. 2019, 74, 59–73. [Google Scholar] [CrossRef]
- He, D.; Chan, S.; Guizani, M. Communication security of unmanned aerial vehicles. IEEE Wirel. Commun. 2016, 24, 134–139. [Google Scholar] [CrossRef]
- Wang, J.; Jin, C.; Tang, Q.; Xiong, N.; Srivastava, G. Intelligent Ubiquitous Network Accessibility for Wireless-Powered MEC in UAV-Assisted B5G. IEEE Trans. Netw. Sci. Eng. 2020. [Google Scholar] [CrossRef]
- Tang, Q.; Chang, L.; Yang, K.; Wang, K.; Wang, J.; Sharma, P.K. Task number maximization offloading strategy seamlessly adapted to UAV scenario. Comput. Commun. 2020, 151, 19–30. [Google Scholar] [CrossRef]
- Lin, N.; Tang, J.; Li, X.; Zhao, L. A novel improved bat algorithm in UAV path planning. Comput. Mater. Contin. 2019, 61, 323–344. [Google Scholar] [CrossRef]
- Chen, P.Y.; Chen, G.Y. The Design of a TLD and Fuzzy-PID Controller based on the Autonomous Tracking System for Quadrotor Drones. Intell. Autom. Soft Comput. 2020, 26, 489–500. [Google Scholar] [CrossRef]
- Qayyum, A.; Ahmad, I.; Iftikhar, M.; Mazher, M. Object Detection and Fuzzy-Based Classification Using UAV Data. Intell. Autom. Soft Comput. 2020, 26, 693–702. [Google Scholar] [CrossRef]
- Zhang, L.; Bai, L.; Zhang, X.; Zhang, Y.; Yang, L.; Yan, X. Cultivated land monitoring system based on dynamic wake-up UAV and wireless of distributed storage. Comput. Mater. Contin. 2019, 61, 817–828. [Google Scholar] [CrossRef]
- Villalonga, A.; Beruvides, G.; Castaño, F.; Haber, R.E. Cloud-based industrial cyber–physical system for data-driven reasoning: A review and use case on an industry 4.0 pilot line. IEEE Trans. Ind. Inform. 2020, 16, 5975–5984. [Google Scholar] [CrossRef]
- Beruvides, G.; Juanes, C.; Castaño, F.; Haber, R.E. A self-learning strategy for artificial cognitive control systems. In Proceedings of the 2015 IEEE 13th International Conference on Industrial Informatics (INDIN), Cambridge, UK, 22–24 July 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1180–1185. [Google Scholar]
- Choudhary, G.; Sharma, V.; You, I.; Yim, K.; Chen, I.R.; Cho, J.H. Intrusion Detection Systems for Networked Unmanned Aerial Vehicles: A Survey. In Proceedings of the 2018 14th International Wireless Communications & Mobile Computing Conference (IWCMC), Limassol, Cyprus, 25–29 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 560–565. [Google Scholar]
- Sharma, V.; Choudhary, G.; Ko, Y.; You, I. Behavior and vulnerability assessment of drones-enabled industrial internet of things (iiot). IEEE Access. 2018, 6, 43368–43383. [Google Scholar] [CrossRef]
- Seo, S.H.; Won, J.; Bertino, E.; Kang, Y.; Choi, D. A security framework for a drone delivery service. In Proceedings of the 2nd Workshop on Micro Aerial Vehicle Networks, Systems, and Applications for Civilian Use, Singapore, 26 June 2016; ACM: New York, NY, USA, 2016; pp. 29–34. [Google Scholar]
- Kriz, V.; Gabrlik, P. Uranuslink-communication protocol for UAV with small overhead and encryption ability. IFAC-Pap. OnLine 2015, 48, 474–479. [Google Scholar] [CrossRef]
- Won, J.; Seo, S.H.; Bertino, E. A secure communication protocol for drones and smart objects. In Proceedings of the 10th ACM Symposium on Information, Computer and Communications Security, Singapore, 14–17 April 2015; ACM: New York, NY, USA, 2015; pp. 249–260. [Google Scholar]
- Islam, N.; Hossain, M.K.; Ali, G.M.; Chong, P.H. An expedite group key establishment protocol for Flying Ad-Hoc Network (FANET). In Proceedings of the 2016 5th International Conference on Informatics, Electronics and Vision (ICIEV), Dhaka, Bangladesh, 13–14 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 312–315. [Google Scholar]
- Maxa, J.A.; Mahmoud, M.S.; Larrieu, N. Extended verification of secure UAANET routing protocol. In Proceedings of the 2016 IEEE/AIAA 35th Digital Avionics Systems Conference (DASC), Sacramento, CA, USA, 25–29 September 2016; IEEE: Piscatvey, NJ, USA, 2016; pp. 1–16. [Google Scholar]
- Blazy, O.; bonnefoi, P.-F.; Conchon, E.; Sauveron, D.; Akram, R.N.; Markantonakis, K.; Mayes, K.; Chaumette, S. An Efficient Protocol for UAS Security. 2017 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 18–20 April 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–21. [Google Scholar]
- Wang, G.; Lim, K.; Lee, B.S.; Ahn, J.Y. Handover Key Management in an LTE-based Unmanned Aerial Vehicle Control Network. In Proceedings of the 2017 5th International Conference on Future Internet of Things and Cloud Workshops (FiCloudW), Prague, Czech Republic, 21–23 August 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 200–205. [Google Scholar]
- Semal, B.; Markantonakis, K.; Akram, R.N. A Certificateless Group Authenticated Key Agreement Protocol for Secure Communication in Untrusted UAV Networks. In Proceedings of the 2018 IEEE/AIAA 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–8. [Google Scholar]
- Kim, S.; Youn, T.; Choi, D.; Park, K. UAV-Undertaker: Securely Verifiable Remote Erasure Scheme with a Countdown-Concept for UAV via Randomized Data Synchronization. Wirel. Commun. Mob. Comput. 2019, 2019, 1–11. [Google Scholar] [CrossRef]
- Wazid, M.; Das, A.K.; Kumar, N.; Vasilakos, A.V.; Rodrigues, J.J. Design and analysis of secure lightweight remote user authentication and key agreement scheme in Internet of drones deployment. IEEE Int. Things J. 2018, 6, 3572–3584. [Google Scholar] [CrossRef]
- Hartmann, K.; Giles, K. UAV exploitation: A new domain for cyber power. In Proceedings of the 2016 8th International Conference on Cyber Conflict (CyCon), Tallinn, Estonia, 31 May–3 June 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 205–221. [Google Scholar]
- Medhi, D.; Huang, D. Secure and resilient routing: Building blocks for resilient network architectures. In Information Assurance; Elsevier Inc.: Amsterdam, The Netherlands, 2008; pp. 417–448. [Google Scholar]
- Dolev, D.; Yao, A. On the security of public key protocols. IEEE Trans. Inf. Theory 1983, 29, 198–208. [Google Scholar] [CrossRef]
- Koubaa, A.; Allouch, A.; Alajlan, M.; Javed, Y.; Belghith, A.; Khalgui, M. Micro air vehicle link (mavlink) in a nutshell: A survey. IEEE Access. 2019, 7, 87658–87680. [Google Scholar] [CrossRef]
- Burrows, M.; Abadi, M.; Needham, R.M. A logic of authentication. Proceedings of the Royal Society A—Mathematical, Physical and Engineering Sciences. 1989. Available online: https://royalsocietypublishing.org/doi/abs/10.1098/rspa.1989.0125 (accessed on 11 May 2020).
- Cremers, C.J. The Scyther Tool: Verification, falsification, and analysis of security protocols. In Proceedings of the International Conference on Computer Aided Verification, Princeton, NJ, USA, 7–14 July 2008; Springer: Berlin/Heidelberg, Germany, 2008; pp. 414–418. [Google Scholar]
- Boyd, C.; Mao, W. On a limitation of BAN logic. In Proceedings of the Workshop on the Theory and Application of of Cryptographic Techniques, Lofthus, Norway, 23–27 May 1993; Springer: Berlin/Heidelberg, Germany, 1993; pp. 240–247. [Google Scholar]
- Armando, A.; Basin, D.; Boichut, Y.; Chevalier, Y.; Compagna, L.; Cuéllar, J.; Mödersheim, S. The AVISPA tool for the automated validation of internet security protocols and applications. In Proceedings of the International conference on computer aided verification, Scotland, UK, 6–10 July 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 281–285. [Google Scholar]
- Galois, Inc. Galois Embedded Crypto: Light Weight Cryptography. Available online: https://github.com/GaloisInc/gec/blob/master/README.md (accessed on 20 April 2015).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| D | Drone. |
| MD | Monitoring Drone. |
| GCS | Ground Control Station. |
| ECDH | Elliptic Curve Diffie–Hellman. |
| ECDSA | Elliptic Curve Digital Signature Algorithm. |
| HMAC | Hash-based Message Authentication Code |
| IDMISSION | Operation ID. |
| P | PIN number. |
| dX | X’s ECDH Private key. |
| QX | X’s ECDH Public key: dX • G. |
| PU(X) | X’s ECDSA Public key. |
| PR(X) | X’s ECDSA Private key. |
| HM(K, M) | An HMAC function where K is a secret and M is an input message. |
| CERTX | X’s Digital Certificate. |
| ts | Timestamp. |
| CMD | Operation command. |
| SK | Session key. |
| MSKX-Y | Master session key shared between X and Y. |
| EKX-Y | Encryption key shared between X and Y. |
| AKX-Y | Authentication key shared between X and Y. |
| ST(X) | X’s Authentication Ticket. |
| LT | Key life cycle (Lifetime). |
| E(K, M) | An encrypt function where K is a secret key and M is an input message. |
| D(K, C) | A decrypt function where K is a secret key and C is a cipher message. |
| Notations | Meanings |
|---|---|
| P believes that the message X is true | |
| P receives the message X at any point in time | |
| P previously sent the message X | |
| P has jurisdiction over X | |
| X is fresh | |
| K is a secret key shared between P and Q | |
| K is the P’s public key and L is the P’s private key | |
| K is a shared secret between P and Q | |
| X is encrypted with a key K | |
| X is combined with Y |
| Rule Names | Rules |
|---|---|
| Message Meaning Rule (MM) | |
| Nonce Verification Rule (NV) | |
| Jurisdiction Rule (JR) | |
| Freshness Rule (FR) | |
| Decomposition Rule (DR) | |
| Belief Conjunction Rule (BC) | |
| Diffie–Hellman Rule (DH) |
| Notations | Meanings |
|---|---|
| Event | Security Attribute |
| Alive, Nisynch, Niagree, Weakagree, Commit | Authentication |
| Secret | Secrecy |
| Security Requirements | [18] | [23] | [27] | [36] | Our Protocol |
|---|---|---|---|---|---|
| Confidentiality | ✓ | ✓ | ✓ | ✓ | ✓ |
| Integrity | ✓ | ✓ | ✓ | ✓ | ✓ |
| Mutual Authentication | ✓ | ✓ | ✓ | ✓ | ✓ |
| Non-repudiation | ✓ | X | X | ✓ | ✓ |
| Perfect Forward Secrecy | X | ✓ | X | ✓ | ✓ |
| Perfect Backward Secrecy | X | ✓ | X | ✓ | ✓ |
| Response to DoS Attacks | ✓ | X | ✓ | X | ✓ |
| Man-in-the-middle response | ✓ | ✓ | ✓ | ✓ | ✓ |
| D2D security support | X | X | ✓ | X | ✓ |
| Security Protocols | Computational Overhead | |
|---|---|---|
| Our Protocol | SP-D2GCS | SP-D2MD |
| [18] | ||
| Initial Step | Authentication Step | |
| [23] | ----- | |
| [27] | ||
| [36] | ||
| Environment | Description |
|---|---|
| UAV | Two UAVs each with Raspberry Pi model B+ |
| GCS | Ubuntu 18.04.3 LTS, 11GB RAM, and i5-2400 CPU @3.10 GHz |
| Language | Python 3.8 |
| Messages | SP-D2GCS | SP-D2MD | ||
|---|---|---|---|---|
| Message Size (bytes) | Latency (ms*) | Message Size (bytes) | Latency (ms*) | |
| M1 | 939 | 71.11001 | 393 | 18.74995 |
| M2 | 1036 | 93.67990 | 257 | 10.45012 |
| M3 | 218 | 23.38982 | 131 | 9.96995 |
| M4 | 218 | 25.03991 | - | - |
| Total | 2411 | 213.2196 | 781 | 29.20008 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ko, Y.; Kim, J.; Duguma, D.G.; Astillo, P.V.; You, I.; Pau, G. Drone Secure Communication Protocol for Future Sensitive Applications in Military Zone. Sensors 2021, 21, 2057. https://doi.org/10.3390/s21062057
Ko Y, Kim J, Duguma DG, Astillo PV, You I, Pau G. Drone Secure Communication Protocol for Future Sensitive Applications in Military Zone. Sensors. 2021; 21(6):2057. https://doi.org/10.3390/s21062057
Chicago/Turabian StyleKo, Yongho, Jiyoon Kim, Daniel Gerbi Duguma, Philip Virgil Astillo, Ilsun You, and Giovanni Pau. 2021. "Drone Secure Communication Protocol for Future Sensitive Applications in Military Zone" Sensors 21, no. 6: 2057. https://doi.org/10.3390/s21062057
APA StyleKo, Y., Kim, J., Duguma, D. G., Astillo, P. V., You, I., & Pau, G. (2021). Drone Secure Communication Protocol for Future Sensitive Applications in Military Zone. Sensors, 21(6), 2057. https://doi.org/10.3390/s21062057