
Overground Robot-Assisted Gait Training for Pediatric Cerebral Palsy

 , and
, and
Abstract
:1. Introduction
2. Materials and Methods
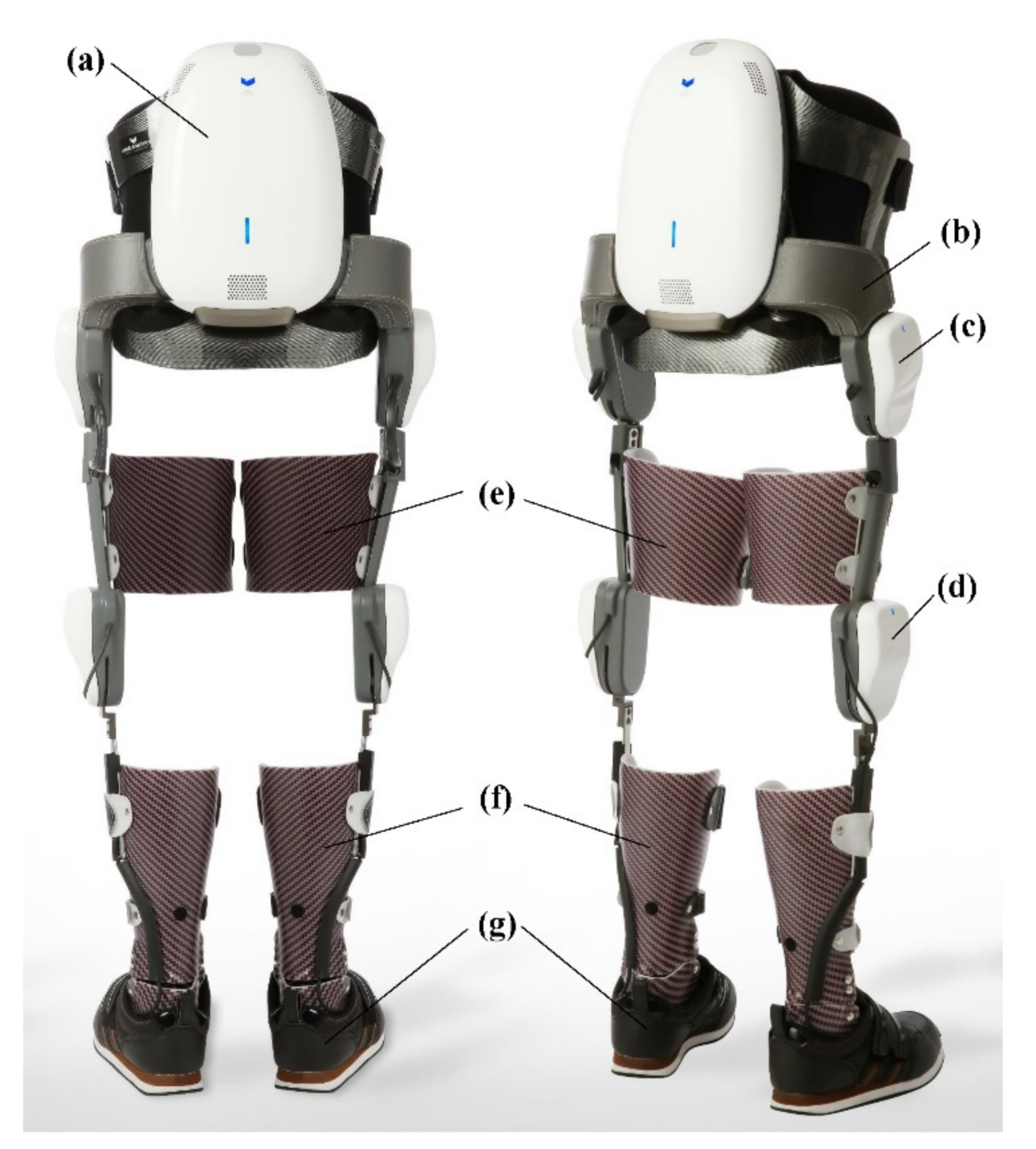
2.1. Wearable Torque-Assisted Exoskeletal Robot
2.2. Participants
2.3. Training Protocol
2.4. Clinical Evaluation
2.4.1. Gross Motor Function Measure
2.4.2. Pediatric Balance Scale
2.4.3. Spatiotemporal Parameters of Gait
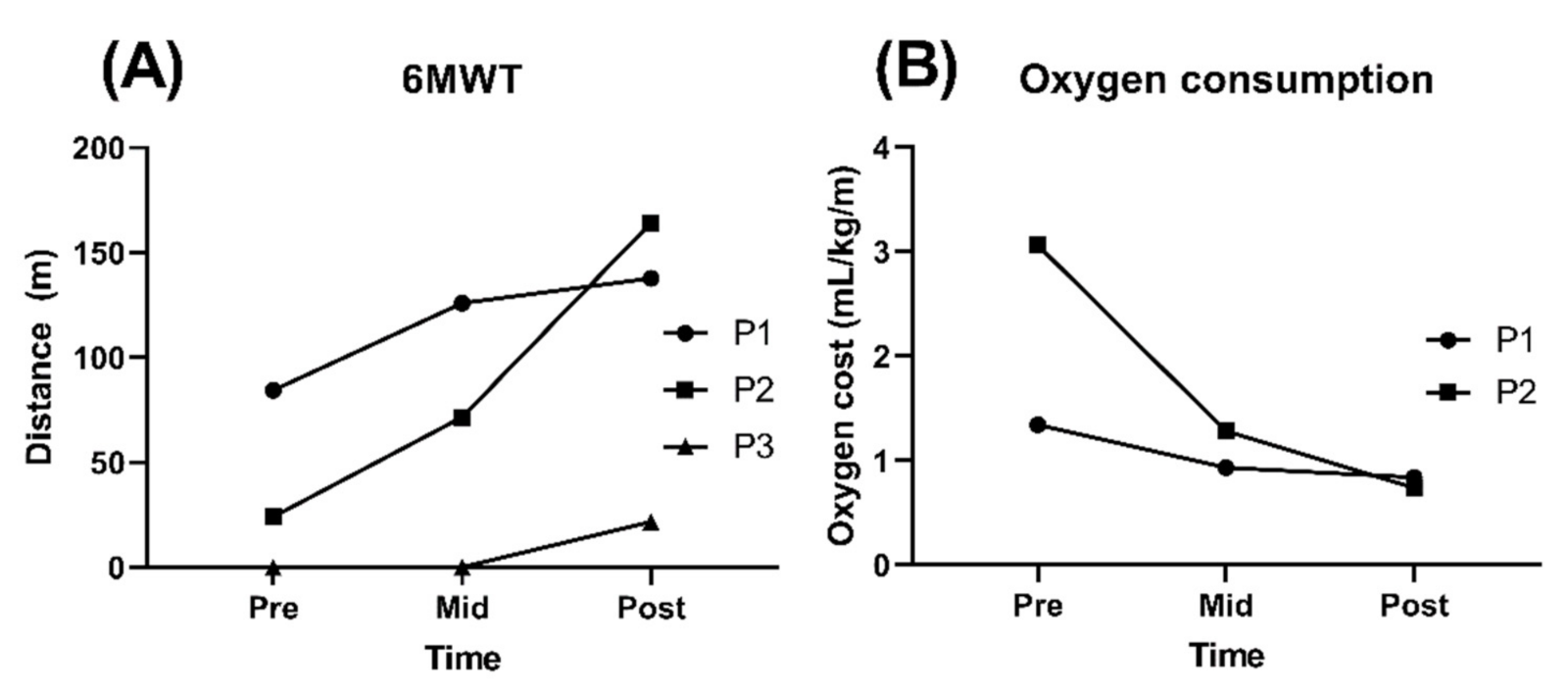
2.4.4. 6-Min Walk Test
2.4.5. Oxygen Consumption
3. Results
3.1. Gross Motor Function & Balance
3.2. Spatiotemporal Parameters of Gait
3.3. Gait Endurance and Oxygen Consumption
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Carvalho, I.; Pinto, S.M.; Chagas, D.D.V.; Praxedes Dos Santos, J.L.; de Sousa Oliveira, T.; Batista, L.A. Robotic Gait Training for Individuals with Cerebral Palsy: A Systematic Review and Meta-Analysis. Arch. Phys. Med. Rehabil. 2017, 98, 2332–2344. [Google Scholar] [CrossRef] [PubMed]
- Lefmann, S.; Russo, R.; Hillier, S. The effectiveness of robotic-assisted gait training for paediatric gait disorders: Systematic review. J. Neuroeng. Rehabil. 2017, 14, 1. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Esquenazi, A.; Talaty, M. Robotics for Lower Limb Rehabilitation. Phys. Med. Rehabil. Clin. N. Am. 2019, 30, 385–397. [Google Scholar] [CrossRef]
- Israel, J.F.; Campbell, D.D.; Kahn, J.H.; Hornby, T.G. Metabolic costs and muscle activity patterns during robotic- and therapist-assisted treadmill walking in individuals with incomplete spinal cord injury. Phys. Ther. 2006, 86, 1466–1478. [Google Scholar] [CrossRef] [Green Version]
- Hidler, J.M.; Wall, A.E. Alterations in muscle activation patterns during robotic-assisted walking. Clin. Biomech. 2005, 20, 184–193. [Google Scholar] [CrossRef]
- Esquenazi, A.; Talaty, M.; Jayaraman, A. Powered Exoskeletons for Walking Assistance in Persons with Central Nervous System Injuries: A Narrative Review. PMR 2017, 9, 46–62. [Google Scholar] [CrossRef] [PubMed]
- Bortole, M.; Venkatakrishnan, A.; Zhu, F.; Moreno, J.C.; Francisco, G.E.; Pons, J.L.; Contreras-Vidal, J.L. The H2 robotic exoskeleton for gait rehabilitation after stroke: Early findings from a clinical study. J. Neuroeng. Rehabil. 2015, 12, 54. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wall, A.; Borg, J.; Palmcrantz, S. Clinical application of the Hybrid Assistive Limb (HAL) for gait training—A systematic review. Front. Syst. Neurosci. 2015, 9, 48. [Google Scholar] [CrossRef] [Green Version]
- Kressler, J.; Thomas, C.K.; Field-Fote, E.C.; Sanchez, J.; Widerstrom-Noga, E.; Cilien, D.C.; Gant, K.; Ginnety, K.; Gonzalez, H.; Martinez, A.; et al. Understanding therapeutic benefits of overground bionic ambulation: Exploratory case series in persons with chronic, complete spinal cord injury. Arch. Phys. Med. Rehabil. 2014, 95, 1878–1887.e1874. [Google Scholar] [CrossRef] [PubMed]
- Nilsson, A.; Vreede, K.S.; Haglund, V.; Kawamoto, H.; Sankai, Y.; Borg, J. Gait training early after stroke with a new exoskeleton--the hybrid assistive limb: A study of safety and feasibility. J. Neuroeng. Rehabil. 2014, 11, 92. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Choi, H.; Na, B.; Kim, S.; Lee, J.; Kim, H.; Kim, D.; Cho, D.; Kim, J.; Shin, S.; Rha, D.-W. Angel-suit: A Modularized Lower-limb Wearable Robot for Assistance of People with Partially Impaired Walking Ability. In Proceedings of the 2019 Wearable Robotics Association Conference (WearRAcon), Scottsdale, AZ, USA, 25–27 March 2019; pp. 51–56. [Google Scholar]
- Aach, M.; Cruciger, O.; Sczesny-Kaiser, M.; Hoffken, O.; Meindl, R.; Tegenthoff, M.; Schwenkreis, P.; Sankai, Y.; Schildhauer, T.A. Voluntary driven exoskeleton as a new tool for rehabilitation in chronic spinal cord injury: A pilot study. Spine J. 2014, 14, 2847–2853. [Google Scholar] [CrossRef] [PubMed]
- Esquenazi, A.; Talaty, M.; Packel, A.; Saulino, M. The ReWalk powered exoskeleton to restore ambulatory function to individuals with thoracic-level motor-complete spinal cord injury. Am. J. Phys. Med. Rehabil. 2012, 91, 911–921. [Google Scholar] [CrossRef] [Green Version]
- Wu, C.H.; Mao, H.F.; Hu, J.S.; Wang, T.Y.; Tsai, Y.J.; Hsu, W.L. The effects of gait training using powered lower limb exoskeleton robot on individuals with complete spinal cord injury. J. Neuroeng. Rehabil. 2018, 15, 14. [Google Scholar] [CrossRef] [Green Version]
- Matsuda, M.; Iwasaki, N.; Mataki, Y.; Mutsuzaki, H.; Yoshikawa, K.; Takahashi, K.; Enomoto, K.; Sano, K.; Kubota, A.; Nakayama, T.; et al. Robot-assisted training using Hybrid Assistive Limb(R) for cerebral palsy. Brain Dev. 2018, 40, 642–648. [Google Scholar] [CrossRef]
- Lerner, Z.F.; Damiano, D.L.; Bulea, T.C. A lower-extremity exoskeleton improves knee extension in children with crouch gait from cerebral palsy. Sci. Transl. Med. 2017, 9. [Google Scholar] [CrossRef] [Green Version]
- Kuroda, M.; Nakagawa, S.; Mutsuzaki, H.; Mataki, Y.; Yoshikawa, K.; Takahashi, K.; Nakayama, T.; Iwasaki, N. Robot-assisted gait training using a very small-sized Hybrid Assistive Limb(R) for pediatric cerebral palsy: A case report. Brain Dev. 2020, 42, 468–472. [Google Scholar] [CrossRef] [PubMed]
- Russell, D.J.; Rosenbaum, P.L.; Cadman, D.T.; Gowland, C.; Hardy, S.; Jarvis, S. The gross motor function measure: A means to evaluate the effects of physical therapy. Dev. Med. Child Neurol. 1989, 31, 341–352. [Google Scholar] [CrossRef] [PubMed]
- Franjoine, M.R.; Gunther, J.S.; Taylor, M.J. Pediatric balance scale: A modified version of the berg balance scale for the school-age child with mild to moderate motor impairment. Pediatr. Phys. Ther. 2003, 15, 114–128. [Google Scholar] [CrossRef] [Green Version]
- Maher, C.A.; Williams, M.T.; Olds, T.S. The six-minute walk test for children with cerebral palsy. Int. J. Rehabil. Res. 2008, 31, 185–188. [Google Scholar] [CrossRef] [PubMed]
- Nsenga Leunkeu, A.; Shephard, R.J.; Ahmaidi, S. Six-minute walk test in children with cerebral palsy gross motor function classification system levels I and II: Reproducibility, validity, and training effects. Arch. Phys. Med. Rehabil. 2012, 93, 2333–2339. [Google Scholar] [CrossRef] [PubMed]
- Thompson, P.; Beath, T.; Bell, J.; Jacobson, G.; Phair, T.; Salbach, N.M.; Wright, F.V. Test-retest reliability of the 10-metre fast walk test and 6-minute walk test in ambulatory school-aged children with cerebral palsy. Dev. Med. Child. Neurol. 2008, 50, 370–376. [Google Scholar] [CrossRef]
- Unnithan, V.B.; Clifford, C.; Bar-Or, O. Evaluation by exercise testing of the child with cerebral palsy. Sports Med. 1998, 26, 239–251. [Google Scholar] [CrossRef] [PubMed]
- Corry, I.S.; Duffy, C.M.; Cosgrave, A.P.; Graham, H.K. Measurement of oxygen consumption in disabled children by the Cosmed K2 portable telemetry system. Dev. Med. Child. Neurol. 1996, 38, 585–593. [Google Scholar] [CrossRef] [PubMed]
- Maltais, D.B.; Robitaille, N.M.; Dumas, F.; Boucher, N.; Richards, C.L. Measuring steady-state oxygen uptake during the 6-min walk test in adults with cerebral palsy: Feasibility and construct validity. Int. J. Rehabil. Res. 2012, 35, 181–183. [Google Scholar] [CrossRef]
- Lusardi, M.M.; Jorge, M.; Nielsen, C.C. Orthotics and Prosthetics in Rehabilitation-E-Book; Elsevier Health Sciences: Philadelphia, PA, USA, 2013. [Google Scholar]
- Oeffinger, D.; Bagley, A.; Rogers, S.; Gorton, G.; Kryscio, R.; Abel, M.; Damiano, D.; Barnes, D.; Tylkowski, C. Outcome tools used for ambulatory children with cerebral palsy: Responsiveness and minimum clinically important differences. Dev. Med. Child Neurol. 2008, 50, 918–925. [Google Scholar] [CrossRef] [PubMed]
- Tudor-Locke, C.; Schuna, J.M., Jr.; Han, H.; Aguiar, E.J.; Larrivee, S.; Hsia, D.S.; Ducharme, S.W.; Barreira, T.V.; Johnson, W.D. Cadence (steps/min) and intensity during ambulation in 6–20 year olds: The CADENCE-kids study. Int. J. Behav. Nutr. Phys. Act. 2018, 15, 20. [Google Scholar] [CrossRef]
- Wessels, M.; Lucas, C.; Eriks, I.; de Groot, S. Body weight-supported gait training for restoration of walking in people with an incomplete spinal cord injury: A systematic review. J. Rehabil. Med. 2010, 42, 513–519. [Google Scholar] [CrossRef] [Green Version]
- Borggraefe, I.; Schaefer, J.S.; Klaiber, M.; Dabrowski, E.; Ammann-Reiffer, C.; Knecht, B.; Berweck, S.; Heinen, F.; Meyer-Heim, A. Robotic-assisted treadmill therapy improves walking and standing performance in children and adolescents with cerebral palsy. Eur. J. Paediatr. Neurol. 2010, 14, 496–502. [Google Scholar] [CrossRef]
- Willoughby, K.L.; Dodd, K.J.; Shields, N.; Foley, S. Efficacy of partial body weight-supported treadmill training compared with overground walking practice for children with cerebral palsy: A randomized controlled trial. Arch. Phys. Med. Rehabil. 2010, 91, 333–339. [Google Scholar] [CrossRef]
- Ueno, T.; Watanabe, H.; Kawamoto, H.; Shimizu, Y.; Endo, A.; Shimizu, T.; Ishikawa, K.; Kadone, H.; Ohto, T.; Kamada, H.; et al. Feasibility and safety of Robot Suit HAL treatment for adolescents and adults with cerebral palsy. J. Clin. Neurosci. 2019, 68, 101–104. [Google Scholar] [CrossRef] [PubMed]
- Hanna, S.E.; Bartlett, D.J.; Rivard, L.M.; Russell, D.J. Reference curves for the Gross Motor Function Measure: Percentiles for clinical description and tracking over time among children with cerebral palsy. Phys. Ther. 2008, 88, 596–607. [Google Scholar] [CrossRef] [PubMed]
- Beckung, E.; Carlsson, G.; Carlsdotter, S.; Uvebrant, P. The natural history of gross motor development in children with cerebral palsy aged 1 to 15 years. Dev. Med. Child Neurol. 2007, 49, 751–756. [Google Scholar] [CrossRef] [PubMed]
- Lotze, M.; Braun, C.; Birbaumer, N.; Anders, S.; Cohen, L.G. Motor learning elicited by voluntary drive. Brain 2003, 126, 866–872. [Google Scholar] [CrossRef] [Green Version]
- Johnston, T.E.; Moore, S.E.; Quinn, L.T.; Smith, B.T. Energy cost of walking in children with cerebral palsy: Relation to the Gross Motor Function Classification System. Dev. Med. Child Neurol. 2004, 46, 34–38. [Google Scholar] [CrossRef]
- Cimolin, V.; Galli, M.; Piccinini, L.; Berti, M.; Crivellini, M.; Turconi, A.C. Quantitative analysis of gait pattern and energy consumption in children with cerebral palsy. J. Appl. Biomater. Biomech. 2007, 5, 28–33. [Google Scholar] [PubMed]
- Bell, K.L.; Davies, P.S. Energy expenditure and physical activity of ambulatory children with cerebral palsy and of typically developing children. Am. J. Clin. Nutr. 2010, 92, 313–319. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Batista, K.G.; de Oliveira Lopes, P.; Serradilha, S.M.; de Souza, G.A.F.; Bella, G.P.; de Souza, R.C.T. Benefícios do condicionamento cardiorrespiratório em crianças ou adolescentes com paralisia cerebral. Fisioterapia em Movimento 2010, 23, 201–209. [Google Scholar] [CrossRef]
- Maltais, D.B.; Wiart, L.; Fowler, E.; Verschuren, O.; Damiano, D.L. Health-related physical fitness for children with cerebral palsy. J. Child Neurol. 2014, 29, 1091–1100. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- ATS Committee on Proficiency Standards for Clinical Pulmonary Function Laboratories. ATS statement: Guidelines for the six-minute walk test. Am. J. Respir. Crit. Care Med. 2002, 166, 111–117. [Google Scholar] [CrossRef]
- Grecco, L.A.; Zanon, N.; Sampaio, L.M.; Oliveira, C.S. A comparison of treadmill training and overground walking in ambulant children with cerebral palsy: Randomized controlled clinical trial. Clin. Rehabil. 2013, 27, 686–696. [Google Scholar] [CrossRef]
- Bayon, C.; Martin-Lorenzo, T.; Moral-Saiz, B.; Ramirez, O.; Perez-Somarriba, A.; Lerma-Lara, S.; Martinez, I.; Rocon, E. A robot-based gait training therapy for pediatric population with cerebral palsy: Goal setting, proposal and preliminary clinical implementation. J. Neuroeng. Rehabil. 2018, 15, 69. [Google Scholar] [CrossRef] [PubMed] [Green Version]



{kind=link}
{kind=link}
| Participant | Gender/ Age (Year) | Height (cm) Weight (kg) | GMFCS | Walking Aid | Training Sessions | Duration (Weeks) |
|---|---|---|---|---|---|---|
| P1 | F/9 | 137/37 | II | None | 20 | 20 |
| P2 | M/13 | 143/53 | III | Bilateral crutches | 17 | 12 |
| P3 | F/16 | 154/51 | IV | Harness or platform walker | 18 | 7 |
| GMFM-88 a (%) | PBS | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| A | B | C | D | E | Total | Static | Dynamic | Total | ||
| P1 | Pre | 100 | 100 | 95.24 | 58.97 | 40.28 | 78.90 | 21 | 19 | 40 |
| Post | 100 | 100 | 95.24 | 71.79 | 40.28 | 81.46 | 21 | 22 | 43 | |
| P2 | Pre | 96.8 | 100 | 85.71 | 58.97 | 29.17 | 73.99 | 14 | 13 | 27 |
| Post | 100 | 100 | 85.71 | 58.97 | 31.94 | 75.33 | 15 | 14 | 29 | |
| P3 | Pre | 92.16 | 70 | 40.48 | 0 | 0 | 40.53 | 0 | 0 | 0 |
| Post | 92.16 | 70 | 47.62 | 2.56 | 0 | 42.47 | 0 | 0 | 0 | |
| Assist Device | Cadence (Steps/min) | Speed (m/s) | Step Length (m) | Step Time (s) | Step Width (m) | Stride Length (m) | Stride Time (s) | SLS (% of GC) | DLS (% of GC) | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| P1 | Pre | None | 80.5 | 0.55 | 0.52 | 0.72 | 0.20 | 0.82 | 1.49 | 32.9 | 42.9 |
| Post | 93.0 | 0.57 | 0.41 | 0.69 | 0.22 | 0.73 | 1.29 | 24.8 | 46.5 | ||
| P2 | Pre | Bilateral crutches | 21.9 | 0.07 | 0.21 | 2.38 | 0.14 | 0.39 | 5.48 | 6.9 | 86.9 |
| Post | 90.2 | 0.38 | 0.28 | 0.83 | 0.19 | 0.51 | 1.33 | 18.8 | 55.7 |
| 6-Min Walking Test (m) | Oxygen Cost (mL/kg/m) | ||
|---|---|---|---|
| P1 | Pre | 84.34 | 1.34 |
| Mid | 125.84 | 0.93 | |
| Post | 137.82 | 0.84 | |
| P2 | Pre | 24.14 | 3.06 |
| Mid | 71.54 | 1.28 | |
| Post | 164.30 | 0.74 | |
| P3 a | Pre | Uncheckable | Not tested |
| Mid | Uncheckable | Not tested | |
| Post | 45.20 (harness)/21.78 (platform walker) | Not tested |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.K.; Park, D.; Yoo, B.; Shim, D.; Choi, J.-O.; Choi, T.Y.; Park, E.S. Overground Robot-Assisted Gait Training for Pediatric Cerebral Palsy. Sensors 2021, 21, 2087. https://doi.org/10.3390/s21062087
Kim SK, Park D, Yoo B, Shim D, Choi J-O, Choi TY, Park ES. Overground Robot-Assisted Gait Training for Pediatric Cerebral Palsy. Sensors. 2021; 21(6):2087. https://doi.org/10.3390/s21062087
Chicago/Turabian StyleKim, Seung Ki, Dongho Park, Beomki Yoo, Dain Shim, Joong-On Choi, Tae Young Choi, and Eun Sook Park. 2021. "Overground Robot-Assisted Gait Training for Pediatric Cerebral Palsy" Sensors 21, no. 6: 2087. https://doi.org/10.3390/s21062087
APA StyleKim, S. K., Park, D., Yoo, B., Shim, D., Choi, J. -O., Choi, T. Y., & Park, E. S. (2021). Overground Robot-Assisted Gait Training for Pediatric Cerebral Palsy. Sensors, 21(6), 2087. https://doi.org/10.3390/s21062087