
Bias Voltage Dependence of Sensing Characteristics in Tunneling Magnetoresistance Sensors

 ,
,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Sensor Fabrication and Characterization
3. Bias Dependence of Sensing Characteristics
3.1. Field Sensitivity
3.2. Nonlinearity
3.3. Hysteresis
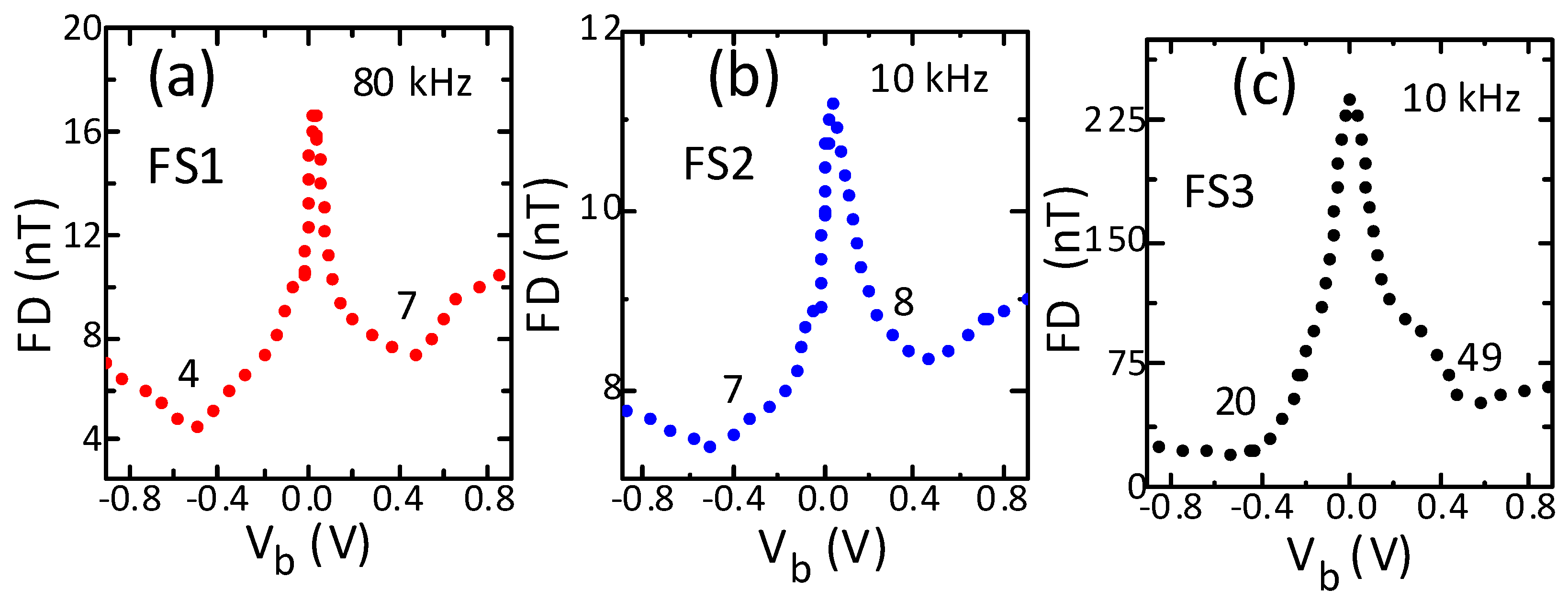
3.4. Field Detection
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Leitao, D.C.; Silva, A.V.; Paz, E.; Ferreira, R.; Cardoso, S.; Freitas, P.P. Magnetoresistive nanosensors: Controlling magnetism at the nanoscale. Nanotechnology 2015, 27, 045501. [Google Scholar] [CrossRef] [PubMed]
- Freitas, P.P.; Ferreira, R.; Cardoso, S. Spintronic Sensors. Proc. IEEE 2016, 104, 10. [Google Scholar] [CrossRef]
- Parkin, S.S.; Kaiser, C.; Panchula, A.; Rice, P.M.; Hughes, B.; Samant, M.; Yang, S.H. Giant tunneling magnetoresistance at room temperature with MgO (100) tunnel barriers. Nat. Mater. 2004, 3, 862. [Google Scholar] [CrossRef] [PubMed]
- Ikeda, S.; Hayakawa, J.; Ashizawa, Y.; Lee, Y.M.; Miura, K.; Hasegawa, H.; Tsunoda, M.; Matsukura, F.; Ohno, H. Tunnel magnetoresistance of 604% at 300 K by suppression of Ta diffusion in CoFeB/MgO/CoFeB pseudo-spin-valves annealed at high temperature. Appl. Phys. Lett. 2008, 93, 082508. [Google Scholar] [CrossRef]
- Wisniowski, P.; Dabek, M.; Cardoso, S.; Freitas, P.P. Magnetic field sensing characteristics of MgO based tunneling magnetoresistance devices with Co40Fe40B20 and Co60Fe20B20 electrodes. Sens. Actuators A 2013, 202, 64. [Google Scholar] [CrossRef]
- Wisniowski, P.; Nawrocki, M.; Dabek, M.; Skowronski, W.; Wrona, J.; Cardoso, S.; Freitas, P.P. Controlling and modifying sensing properties of tunneling magnetoresistance sensors by voltage controlled magnetic anisotropy. Spintron. XII 2019, 11090, 110903O. [Google Scholar] [CrossRef]
- Wisniowski, P.; Dabek, M.; Wrona, J. Field noise in tunneling magnetoresistance sensors with variable sensitivity. Appl. Phys. Lett. 2015, 106, 052404. [Google Scholar] [CrossRef]
- Su, D.; Wu, K.; Saha, R.; Peng, C.; Wang, J. Advances in Magnetoresistive Biosensors. Micromachines 2019, 11, 34. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dabek, M.; Wisniowski, P.; Kalabinski, P.; Wrona, J.; Moskaltsova, A.; Cardoso, S.; Freitas, P.P. Tunneling magnetoresistance sensors for high fidelity current waveforms monitoring. Sens. Actuators A 2016, 251, 142. [Google Scholar] [CrossRef]
- Nandapurkar, K.B.; Sreekantan, A.C.; Dutta, P.K. Performance Investigation of a Simplified TMR-Based Rotary Position Sensing System. IEEE Trans. Instrum. Meas. 2021, 70, 1–8. [Google Scholar] [CrossRef]
- Tsymbal, E.Y.; Mryasov, O.N.; LeClair, P.R. Spin-dependent tunnelling in magnetic tunnel junctions. J. Phys. Condens. Matter 2003, 15, R109–R142. [Google Scholar] [CrossRef]
- Yuasa, S.; Nagahama, T.; Fukushima, A.; Suzuki, Y.; Ando, K. Giant room-temperature magnetoresistance in single-crystal Fe/MgO/Fe magnetic tunnel junctions. Nat. Mater. 2004, 3, 868. [Google Scholar] [CrossRef] [PubMed]
- Nozaki, T.; Hirohata, A.; Tezuka, N.; Sugimoto, S.; Inomata, K. Bias voltage effect on tunnel magnetoresistance in fully epitaxial MgO double-barrier magnetic tunnel junctions. Appl. Phys. Lett. 2005, 86, 082501. [Google Scholar] [CrossRef]
- Daibou, T.; Shinano, M.; Hattori, M.; Sakuraba, Y.; Oogane, M.; Ando, Y.; Miyazaki, T. Bias voltage dependence of tunnel magnetoresistance effect in CoFeB/MgO/Co2X(X = Fe, Mn)Si magnetic tunnel junctions. J. Magn. Magn. Mater. 2007, 310, 1926–1928. [Google Scholar] [CrossRef]
- Kalitsov, A.; Zermatten, P.J.; Bonell, F.; Gaudin, G.; Andrieu, S.; Tiusan, C.; Chshiev, M.; Velev, J.P. Bias dependence of tunneling magnetoresistance in magnetic tunnel junctions with asymmetric barriers. J. Phys. Condens. Matter 2013, 25, 496005. [Google Scholar] [CrossRef] [Green Version]
- Tezuka, N.; Tezuka, N.; Oikawa, S.; Abe, I.; Matsuura, M.; Sugimoto, S.; Nishimura, K.; Seino, T. Perpendicular Magnetic Tunnel Junctions with Low Resistance-Area Product: High Output Voltage and Bias Dependence of Magnetoresistance. IEEE Magn. Lett. 2016, 7, 1. [Google Scholar] [CrossRef]
- Almeida, J.M.; Wisniowski, P.; Freitas, P.P. Low-Frequency Noise in MgO Magnetic Tunnel Junctions: Hooge’s Parameter Dependence on Bias Voltage. IEEE Trans. Magn. 2008, 44, 2569. [Google Scholar] [CrossRef]
- Almeida, J.M.; Wisniowski, P.; Freitas, P.P. Field detection in single and double barrier MgO magnetic tunnel junction sensors. J. Appl. Phys. 2008, 103, 07E922. [Google Scholar] [CrossRef]
- Wisniowski, R.F.P.; Freitas, P.P. Tuning of MgO barrier magnetic tunnel junction bias current for picotesla magnetic field detection. J. Appl. Phys. 2006, 99, 08K706. [Google Scholar]
- Dabek, M.; Wisniowski, P.; Stobiecki, T.; Wrona, J.; Cardoso, S.; Freitas, P.P. Sensitivity and 3 dB Bandwidth in Single and Series-Connected Tunneling Magnetoresistive Sensors. Sensors 2016, 16, 1821. [Google Scholar] [CrossRef] [Green Version]
- Wisniowski, P.; Wrona, J.; Stobiecki, T.; Cardoso, S.; Freitas, P.P. Magnetic tunnel junctions based on out-of-plane anisotropy free and in-plane pinned layer structures for magnetic field sensors. IEEE Trans. Magn. 2012, 48, 3840. [Google Scholar] [CrossRef]
- Silva, A.V.; Leitao, D.C.; Valadeiro, J.; Amaral, J.; Freitas, P.P.; Cardoso, S. Linearization strategies for high sensitivity magnetoresistive sensors. Eur. Phys. J. A Ppl. P Hys. 2015, 72, 10601. [Google Scholar]
- Cecot, M.; Karwacki, Łukasz; Skowroński, W.; Kanak, J.; Wrona, J.; Żywczak, A.; Yao, L.; Van Dijken, S.; Barnaś, J.; Stobiecki, T. Influence of intermixing at the Ta/CoFeB interface on spin Hall angle in Ta/CoFeB/MgO heterostructures. Sci. Rep. 2017, 7, 968. [Google Scholar] [CrossRef] [PubMed]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wiśniowski, P.; Nawrocki, M.; Wrona, J.; Cardoso, S.; Freitas, P.P. Bias Voltage Dependence of Sensing Characteristics in Tunneling Magnetoresistance Sensors. Sensors 2021, 21, 2495. https://doi.org/10.3390/s21072495
Wiśniowski P, Nawrocki M, Wrona J, Cardoso S, Freitas PP. Bias Voltage Dependence of Sensing Characteristics in Tunneling Magnetoresistance Sensors. Sensors. 2021; 21(7):2495. https://doi.org/10.3390/s21072495
Chicago/Turabian StyleWiśniowski, Piotr, Maciej Nawrocki, Jerzy Wrona, Susana Cardoso, and Paulo. P. Freitas. 2021. "Bias Voltage Dependence of Sensing Characteristics in Tunneling Magnetoresistance Sensors" Sensors 21, no. 7: 2495. https://doi.org/10.3390/s21072495
APA StyleWiśniowski, P., Nawrocki, M., Wrona, J., Cardoso, S., & Freitas, P. P. (2021). Bias Voltage Dependence of Sensing Characteristics in Tunneling Magnetoresistance Sensors. Sensors, 21(7), 2495. https://doi.org/10.3390/s21072495