
The Utilization of Artificial Neural Network Equalizer in Optical Camera Communications †

 ,
, 
 ,
,  , and
, and
Abstract
:1. Introduction
- Comprehensive and systematical investigation of the applicability of CP-PAM for the LED- and camera-based VLC.
- Development of a practical CP-PAM OCC prototype with a single Luxeon Rebel white LED (SR-01-WC310) and an IS (Thorlabs DCC1645C) as the Tx and the Rx, respectively.
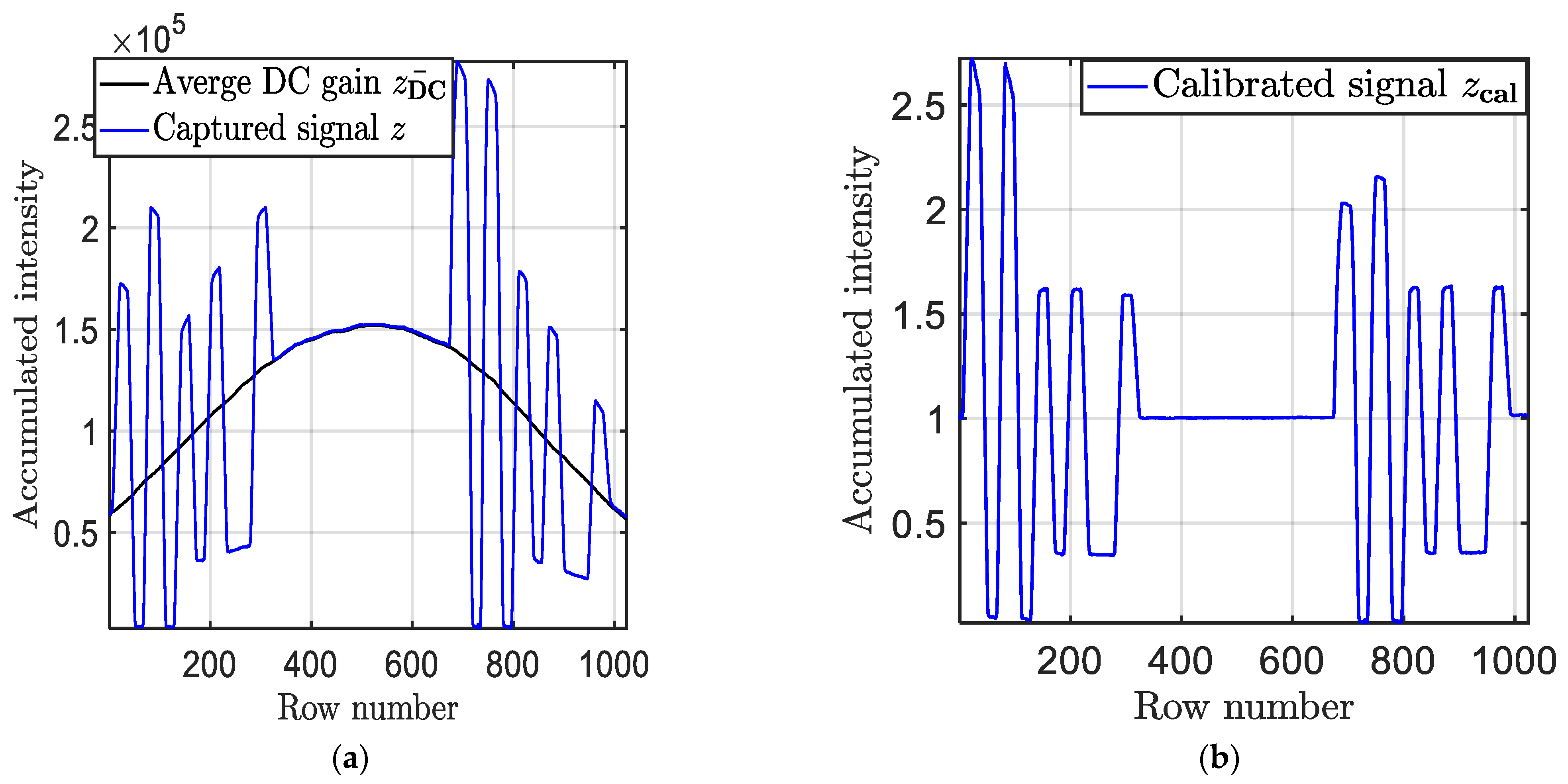
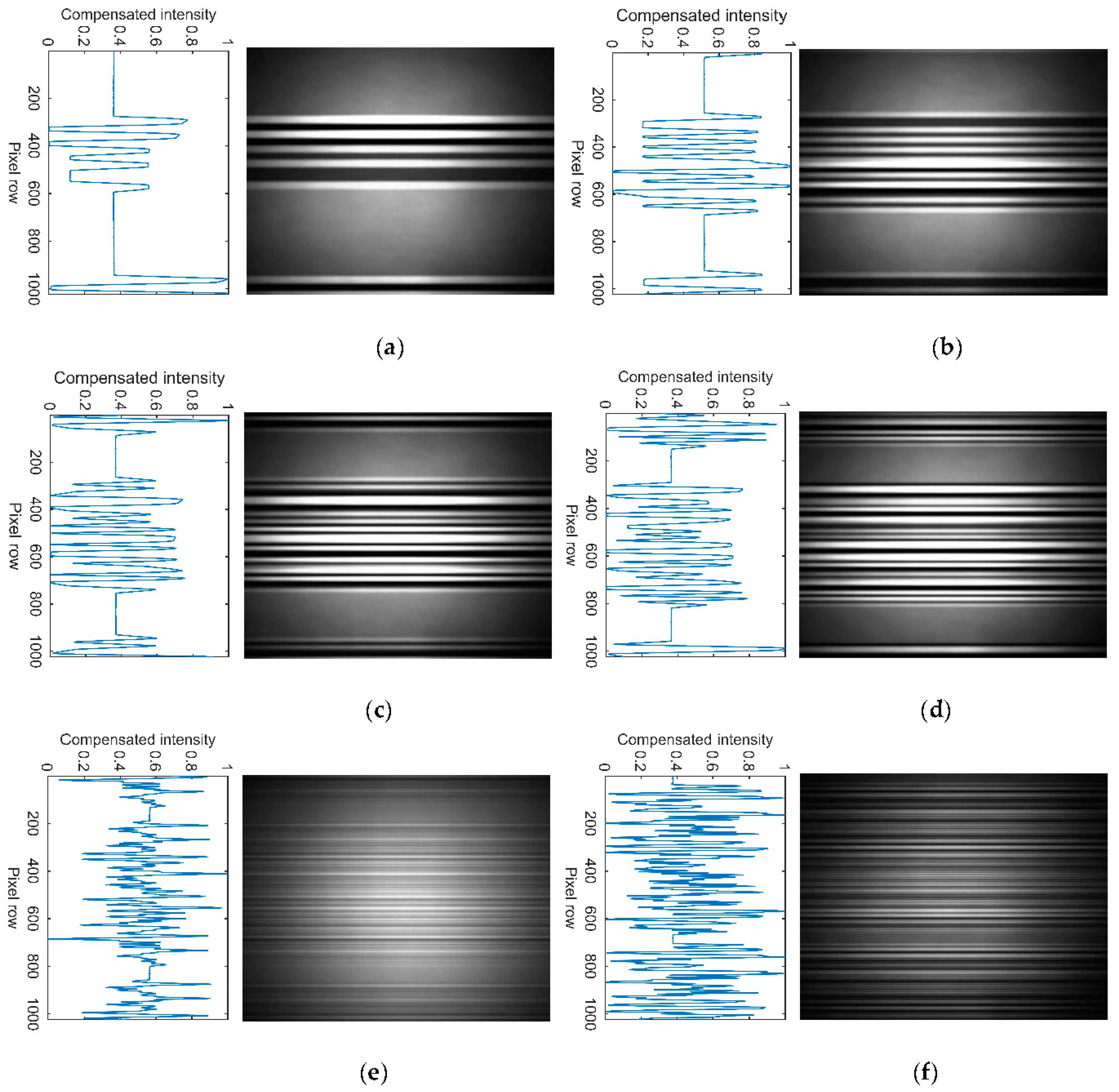
- Development of an efficient signal extraction algorithm for the RS-based OCC system.
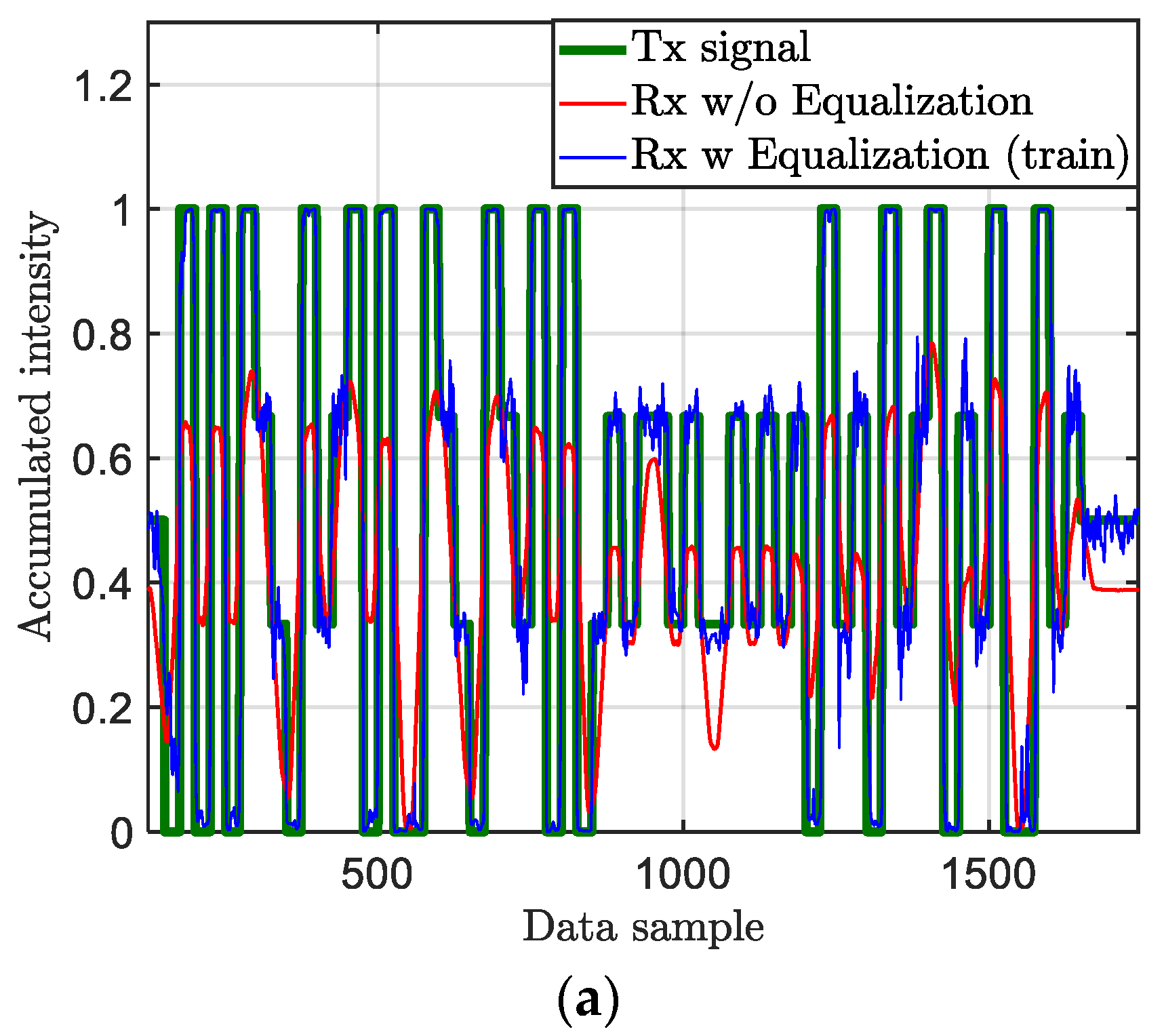
- Implementation of an ANN-based equalizer at the Rx to enhance the system performance.
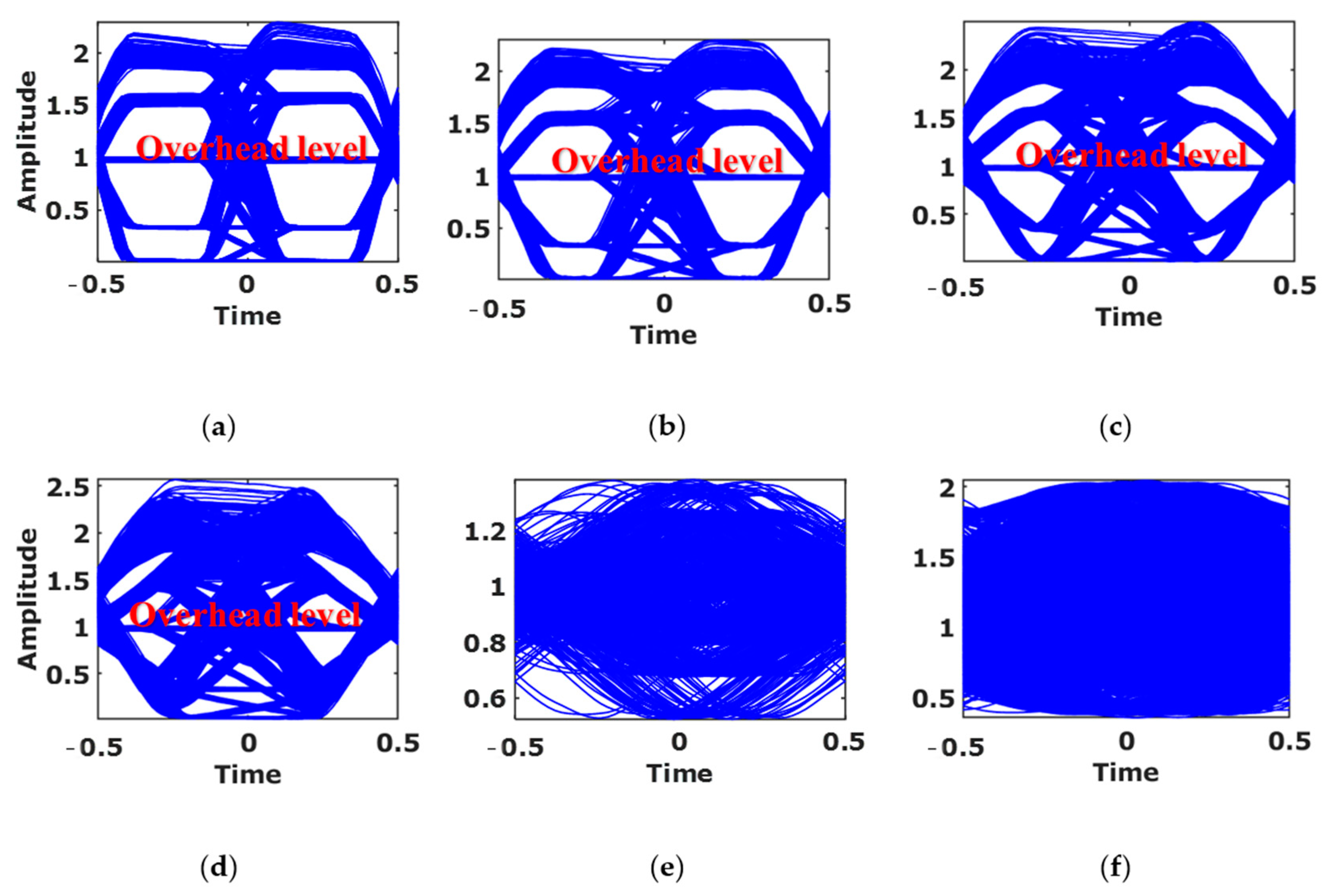
- Development of an experimental test-bed for the proposed system and evaluating it in terms of the Tx’s frequency, eye diagrams, and the bit error rate (BER) with and without the ANNs-based equalizer.
- Proposing a new measurement metric for assessing the quality of the communications link in terms of the number of row pixels/symbol.
2. Constant Power-PAM in RS-Based OCC System
3. ANN Equalizer
4. Experimental Setup
| Algorithm 1 Signal Extraction Algorithm |
 |
| Algorithm 2 Find the frame with full packet inclusion (i.e., includes both pre- and post-ambles) |
 |
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Teli, S.R.; Zvanovec, S.; Ghassemlooy, Z. Performance evaluation of neural network assisted motion detection schemes implemented within indoor optical camera based communications. Opt. Express 2019, 27, 24082–24092. [Google Scholar] [CrossRef]
- Eso, E.; Ghassemlooy, Z.; Zvanovec, S.; Gholami, A.; Burton, A.; Hassan, N.B.; Younus, O.I. Experimental Demonstration of Vehicle to Road Side Infrastructure Visible Light Communications. In Proceedings of the 2019 2nd West Asian Colloquium on Optical Wireless Communications (WACOWC), Tehran, Iran, 27–28 April 2019; pp. 85–89. [Google Scholar]
- Saeed, N.; Guo, S.; Park, K.-H.; Al-Naffouri, T.Y.; Alouini, M.-S. Optical camera communications: Survey, use cases, challenges, and future trends. Phys. Commun. 2019, 37, 100900. [Google Scholar] [CrossRef] [Green Version]
- Younus, O.I.; Hassan, N.B.; Ghassemlooy, Z.; Haigh, P.A.; Zvanovec, S.; Alves, L.N.; Minh, H.L. Data Rate Enhancement in Optical Camera Communications Using an Artificial Neural Network Equaliser. IEEE Access 2020, 8, 42656–42665. [Google Scholar] [CrossRef]
- Lee, H.-Y.; Lin, H.-M.; Wei, Y.-L.; Wu, H.-I.; Tsai, H.-M.; Lin, K.C.-J. RollingLight: Enabling Line-of-Sight Light-to-Camera Communications. In Proceedings of the 13th Annual International Conference on Mobile Systems, Applications, and Services, Florence, Italy, 18–22 May 2015; pp. 167–180. [Google Scholar]
- Nguyen, T.; Islam, A.; Hossan, T.; Jang, Y.M. Current Status and Performance Analysis of Optical Camera Communication Technologies for 5G Networks. IEEE Access 2017, 5, 4574–4594. [Google Scholar] [CrossRef]
- Bani Hassan, N.; Ghassemlooy, Z.; Zvanovec, S.; Biagi, M.; Vegni, A.M.; Zhang, M.; Luo, P. Non-Line-of-Sight MIMO Space-Time Division Multiplexing Visible Light Optical Camera Communications. J. Lightwave Technol. 2019, 37, 2409–2417. [Google Scholar] [CrossRef]
- Eso, E.; Teli, S.; Bani Hassan, N.; Vitek, S.; Ghassemlooy, Z.; Zvanovec, S. 400 m rolling-shutter-based optical camera communications link. Opt. Lett. 2020, 45, 1059–1062. [Google Scholar] [CrossRef]
- Lauxtermann, S.; Lee, A.; Stevens, J.; Joshi, A. Comparison of Global Shutter Pixels for CMOS Image Sensors. In Proceedings of the 2007 International Image Sensor Workshop, Ogunquit, ME, USA, 7–10 June 2007. [Google Scholar]
- Li, X.; Hassan, N.B.; Burton, A.; Ghassemlooy, Z.; Zvanovec, S.; Perez-Jimenez, R. A Simplified Model for the Rolling Shutter Based Camera in Optical Camera Communications. In Proceedings of the 2019 15th International Conference on Telecommunications (ConTEL), Graz, Austria, 3–5 July 2019; pp. 1–5. [Google Scholar]
- Sturniolo, A.; Cossu, G.; Ciaramella, E.; Hassan, N.B.; Shou, Z.; Huang, Y.; Ghassemlooy, Z. ROI Assisted Digital Signal Processing for Rolling Shutter Optical Camera Communications. In Proceedings of the 2018 11th International Symposium on Communication Systems, Networks & Digital Signal Processing (CSNDSP), Budapest, Hungary, 18–20 July 2018; pp. 1–6. [Google Scholar]
- Nguyen, T.; Islam, A.; Yamazato, T.; Jang, Y.M. Technical Issues on IEEE 802.15.7m Image Sensor Communication Standardization. IEEE Commun. Mag. 2018, 56, 213–218. [Google Scholar] [CrossRef]
- Cahyadi, W.A.; Chung, Y.H.; Ghassemlooy, Z.; Hassan, N.B. Optical Camera Communications: Principles, Modulations, Potential and Challenges. Electronics 2020, 9, 1339. [Google Scholar] [CrossRef]
- Goto, Y.; Takai, I.; Yamazato, T.; Okada, H.; Fujii, T.; Kawahito, S.; Arai, S.; Yendo, T.; Kamakura, K. A New Automotive VLC System Using Optical Communication Image Sensor. IEEE Photonics J. 2016, 8, 1–17. [Google Scholar] [CrossRef]
- Roberts, R.D. Undersampled frequency shift ON-OFF keying (UFSOOK) for camera communications (CamCom). In Proceedings of the 2013 22nd Wireless and Optical Communication Conference, Chongqing, China, 16–18 May 2013; pp. 645–648. [Google Scholar]
- Luo, P.; Ghassemlooy, Z.; Le Minh, H.; Tang, X.; Tsai, H. Undersampled phase shift ON-OFF keying for camera communication. In Proceedings of the Sixth International Conference on Wireless Communications and Signal Processing (WCSP), Hefei, China, 23–25 October 2014. [Google Scholar]
- Nguyen, D.T.; Chae, Y.; Park, Y. Enhancement of Data Rate and Packet Size in Image Sensor Communications by Employing Constant Power 4-PAM. IEEE Access 2018, 6, 8000–8010. [Google Scholar] [CrossRef]
- Luo, P.; Ghassemlooy, Z.; Minh, H.L.; Tsai, H.; Tang, X. Undersampled-PAM with subcarrier modulation for camera communications. In Proceedings of the 2015 Opto-Electronics and Communications Conference (OECC), Shanghai, China, 28 June–2 July 2015; pp. 1–3. [Google Scholar]
- Luo, P.; Zhang, M.; Ghassemlooy, Z.; Zvanovec, S.; Feng, S.; Zhang, P. Undersampled-Based Modulation Schemes for Optical Camera Communications. IEEE Commun. Mag. 2018, 56, 204–212. [Google Scholar] [CrossRef] [Green Version]
- Rachim, V.P.; Chung, W. Multilevel Intensity-Modulation for Rolling Shutter-Based Optical Camera Communication. IEEE Photonics Technol. Lett. 2018, 30, 903–906. [Google Scholar] [CrossRef]
- Hu, P.; Pathak, P.H.; Zhang, H.; Yang, Z.; Mohapatra, P. High Speed LED-to-Camera Communication using Color Shift Keying with Flicker Mitigation. IEEE Trans. Mobile Comput. 2020, 19, 1603–1617. [Google Scholar] [CrossRef] [Green Version]
- Luo, P.; Zhang, M.; Ghassemlooy, Z.; Minh, H.L.; Tsai, H.; Tang, X.; Png, L.C.; Han, D. Experimental Demonstration of RGB LED-Based Optical Camera Communications. IEEE Photonics J. 2015, 7, 1–12. [Google Scholar] [CrossRef]
- Griffiths, A.D.; Herrnsdorf, J.; Strain, M.J.; Dawson, M.D. Scalable visible light communications with a micro-LED array projector and high-speed smartphone camera. Opt. Express 2019, 27, 15585–15594. [Google Scholar] [CrossRef]
- Liu, L.; Deng, R.; Chen, L. Spatial and Time Dispersions Compensation With Double-Equalization for Optical Camera Communications. IEEE Photonics Technol. Lett. 2019, 31, 1753–1756. [Google Scholar] [CrossRef]
- Haigh, P.A.; Ghassemlooy, Z.; Rajbhandari, S.; Papakonstantinou, I.; Popoola, W. Visible Light Communications: 170 Mb/s Using an Artificial Neural Network Equalizer in a Low Bandwidth White Light Configuration. J. Lightwave Technol. 2014, 32, 1807–1813. [Google Scholar] [CrossRef]
- Rajbhandari, S.; Ghassemlooy, Z.; Angelova, M. Effective Denoising and Adaptive Equalization of Indoor Optical Wireless Channel with Artificial Light Using the Discrete Wavelet Transform and Artificial Neural Network. J. Lightwave Technol. 2009, 27, 4493–4500. [Google Scholar] [CrossRef] [Green Version]
- Rajbhandari, S.; Faith, J.; Ghassemlooy, Z.; Angelova, M. Comparative study of classifiers to mitigate intersymbol interference in diffuse indoor optical wireless communication links. Optik 2013, 124, 4192–4196. [Google Scholar] [CrossRef]
- Willy Anugrah, C.; Yeon Ho, C. Smartphone camera-based device-to-device communication using neural network-assisted high-density modulation. Opt. Eng. 2018, 57, 1–9. [Google Scholar]
- Islam, A.; Hossan, M.T.; Jang, Y.M. Convolutional neural networkscheme–based optical camera communication system for intelligent Internet of vehicles. Int. J. Distrib. Sens. Netw. 2018, 14, 1550147718770153. [Google Scholar] [CrossRef]
- Liu, L.; Deng, R.; Chen, L.-K. 47-kbit/s RGB-LED-based optical camera communication based on 2D-CNN and XOR-based data loss compensation. Opt. Express 2019, 27, 33840–33846. [Google Scholar] [CrossRef]
- Younus, O.I.; Hassan, N.B.; Ghassemlooy, Z.; Zvanovec, S.; Alves, L.N.; Haigh, P.A.; Minh, H.L. An Artificial Neural Network Equalizer for Constant Power 4-PAM in Optical Camera Communications. In Proceedings of the 2020 12th International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), Porto, Portugal, 20–22 July 2020; pp. 1–6. [Google Scholar]
- Nguyen, H.; Pham, T.L.; Nguyen, H.; Jang, Y.M. Trade-off Communication distance and Data rate of Rolling shutter OCC. In Proceedings of the 2019 Eleventh International Conference on Ubiquitous and Future Networks (ICUFN), Zagreb, Croatia, 2–5 July 2019; pp. 148–151. [Google Scholar]
- Chau, J.C.; Little, T.D.C. Analysis of CMOS active pixel sensors as linear shift-invariant receivers. In Proceedings of the 2015 IEEE International Conference on Communication Workshop (ICCW), London, UK, 8–12 June 2015; pp. 1398–1403. [Google Scholar]
- Lehman, B.; Wilkins, A.; Berman, S.; Poplawski, M.; Miller, N.J. Proposing measures of flicker in the low frequencies for lighting applications. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 16–21 September 2011; pp. 2865–2872. [Google Scholar]
- DiLaura, D.L.; Houser, K.W.; Mistrick, R.; Stey, S.G. The Lighting Handbook Reference and Application, 10th ed.; Illuminating Engineering Society of North America (IES): New York, NY, USA, 2011; p. 247. [Google Scholar]
- Rajbhandari, S.; Chun, H.; Faulkner, G.; Haas, H.; Xie, E.; McKendry, J.J.D.; Herrnsdorf, J.; Gu, E.; Dawson, M.D.; O’Brien, D. Neural Network-Based Joint Spatial and Temporal Equalization for MIMO-VLC System. IEEE Photonics Technol. Lett. 2019, 31, 821–824. [Google Scholar] [CrossRef] [Green Version]
- 1.3Mp CMOS Digital Image Sensor. In ON Semiconductor; Application Note 98AON94065F; Semiconductor Components Industries, LLC: Aurora, CO, USA, 2017; Available online: https://www.onsemi.com/pdf/datasheet/mt9m131-d.pdf (accessed on 20 March 2021).
- Cossu, G.; Sturniolo, A.; Ciaramella, E. Modelization and Characterization of a CMOS Camera as an Optical Real-Time Oscilloscope. IEEE Photonics J. 2020, 12, 1–13. [Google Scholar] [CrossRef]
- AN 835: PAM4 Signaling Fundamentals. Intel; Application Note AN-835; Intel Corporation: Santa Clara, CA, USA, 2019; Available online: https://www.intel.com/content/dam/www/programmable/us/en/pdfs/literature/an/an835.pdf (accessed on 10 March 2021).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Data | Conventional PAM Level | Constant Power 4-PAM | |
|---|---|---|---|
| First Level | Stabilization Level | ||
| 11 | 3 | 3 | 0 |
| 10 | 2 | 2 | 1 |
| 01 | 1 | 1 | 2 |
| 00 | 0 | 0 | 3 |
| Description | Value | |
|---|---|---|
| Tx | LED type | Luxeon Rebel LED (SR-01-WC310) |
| Tx signal bandwidth (Hz) | 220–1520 Hz | |
| Tx bias current | 180 mA | |
| Camera Rx | Camera model | Thorlabs DCC1645C-HQ |
| Exposure time Texp | 2 ms | |
| Maximum SNR of IS | 44 dB [37] | |
| Lens type | Navitar 12 mm F/1.8 2/3” 10 MP | |
| Pixel clock | 10 MHz | |
| Camera raw image resolution | 1280 × 1024 pixels | |
| Captured symbols per frame | 11–76 symbols | |
| Packet Generator | Data format | CP-PAM |
| Symbol per packet Pbit | 5–70 symbols | |
| Packet generator sample rate | 11.125 kHz | |
| Number of samples | 10 | |
| Channel | Channel length | 50 cm |
| ANN Equalizer | Activation function | Hyperbolic tangent sigmoid |
| Number of neurons in input layer | 200 | |
| Number of neurons in output layer | 1 | |
| Number of neurons in hidden layer | 200 | |
| Number of hidden layers | 2 | |
| Percentage of the train to test | 0.8 | |
| Maximum epochs | 1000 | |
| learning rate parameter η | 0.01 | |
| Network training function | Resilient back-propagation | |
| Payload Symbol/Packet (Pbit) | Total Number of Symbols/Packet | ||
|---|---|---|---|
| 5 | 11 | 60.54 | 220 |
| 10 | 16 | 41.62 | 320 |
| 15 | 21 | 31.71 | 420 |
| 20 | 26 | 25.61 | 520 |
| 30 | 36 | 18.50 | 720 |
| 35 | 41 | 16.24 | 820 |
| 40 | 46 | 14.48 | 920 |
| 50 | 56 | 11.89 | 1120 |
| 70 | 76 | 8.76 | 1520 |
| ISs Resolutions | (i.e., w/o Equalization) | (i.e., with Equalization) | ||
|---|---|---|---|---|
| Rf = 30 fps | Rf = 60 fps | Rf = 30 fps | Rf = 60 fps | |
| 1200 × 1800 | 3794 | 7588 | 5040 | 10,080 |
| 1500 × 2100 | 4486 | 8972 | 5940 | 11,880 |
| 1800 × 2400 | 5178 | 10,357 | 6840 | 13,680 |
| 2100 × 3000 | 6563 | 13,126 | 8640 | 17,280 |
| 2400 × 3000 | 6563 | 13,126 | 8640 | 17,280 |
| 3300 × 4200 | 9332 | 18,665 | 12,240 | 24,480 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Younus, O.I.; Hassan, N.B.; Ghassemlooy, Z.; Zvanovec, S.; Alves, L.N.; Le-Minh, H. The Utilization of Artificial Neural Network Equalizer in Optical Camera Communications. Sensors 2021, 21, 2826. https://doi.org/10.3390/s21082826
Younus OI, Hassan NB, Ghassemlooy Z, Zvanovec S, Alves LN, Le-Minh H. The Utilization of Artificial Neural Network Equalizer in Optical Camera Communications. Sensors. 2021; 21(8):2826. https://doi.org/10.3390/s21082826
Chicago/Turabian StyleYounus, Othman Isam, Navid Bani Hassan, Zabih Ghassemlooy, Stanislav Zvanovec, Luis Nero Alves, and Hoa Le-Minh. 2021. "The Utilization of Artificial Neural Network Equalizer in Optical Camera Communications" Sensors 21, no. 8: 2826. https://doi.org/10.3390/s21082826
APA StyleYounus, O. I., Hassan, N. B., Ghassemlooy, Z., Zvanovec, S., Alves, L. N., & Le-Minh, H. (2021). The Utilization of Artificial Neural Network Equalizer in Optical Camera Communications. Sensors, 21(8), 2826. https://doi.org/10.3390/s21082826