Neuroevolution-Based Adaptive Antenna Array Beamforming Scheme to Improve the V2V Communication Performance at Intersections

 , ,
, ,  ,
,  and
and
Abstract
:1. Introduction
1.1. Related Work
1.2. Contributions and Organization of the Paper
- 1.
- We show the positive impact of using evolutionary algorithms with beamforming in urban V2V communication scenarios to learn beam shapes according to the surrounding environment.
- 2.
- We propose the use of a neuroevolution algorithm to optimize beam shapes with beamforming for V2V communications in urban scenarios. Unlike other machine learning approaches, such as GA and PSO, NEAT does not require interpolating previously visited positions, since the artificial neural networks take any position as an input.
- 3.
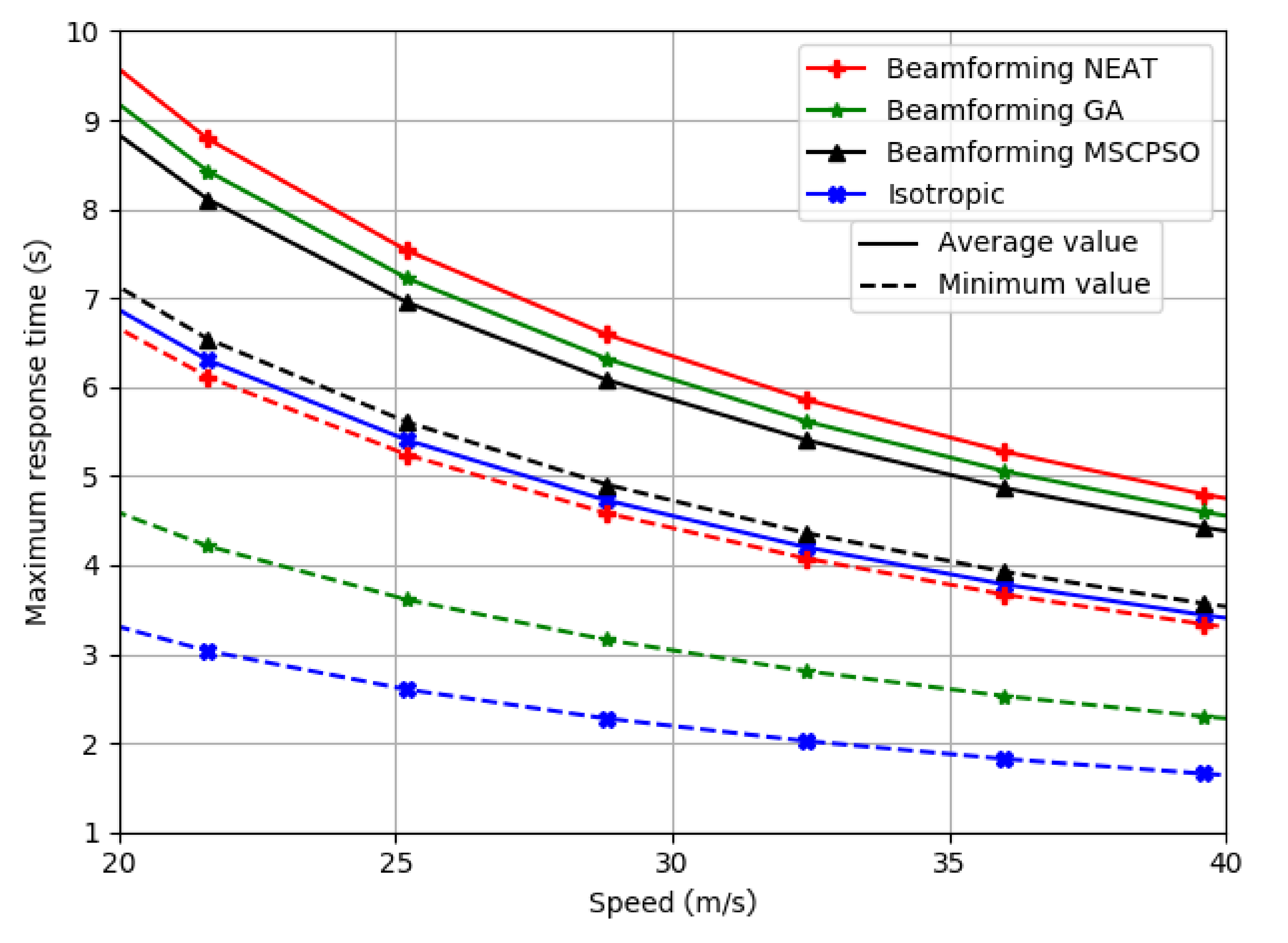
- Beamforming with NEAT outperforms the baseline isotropic antenna, as well as beamforming optimized with MSCPSO and GA, in terms of the average response time and the communication range, which are of vital importance for road safety applications.
2. Methods and Materials
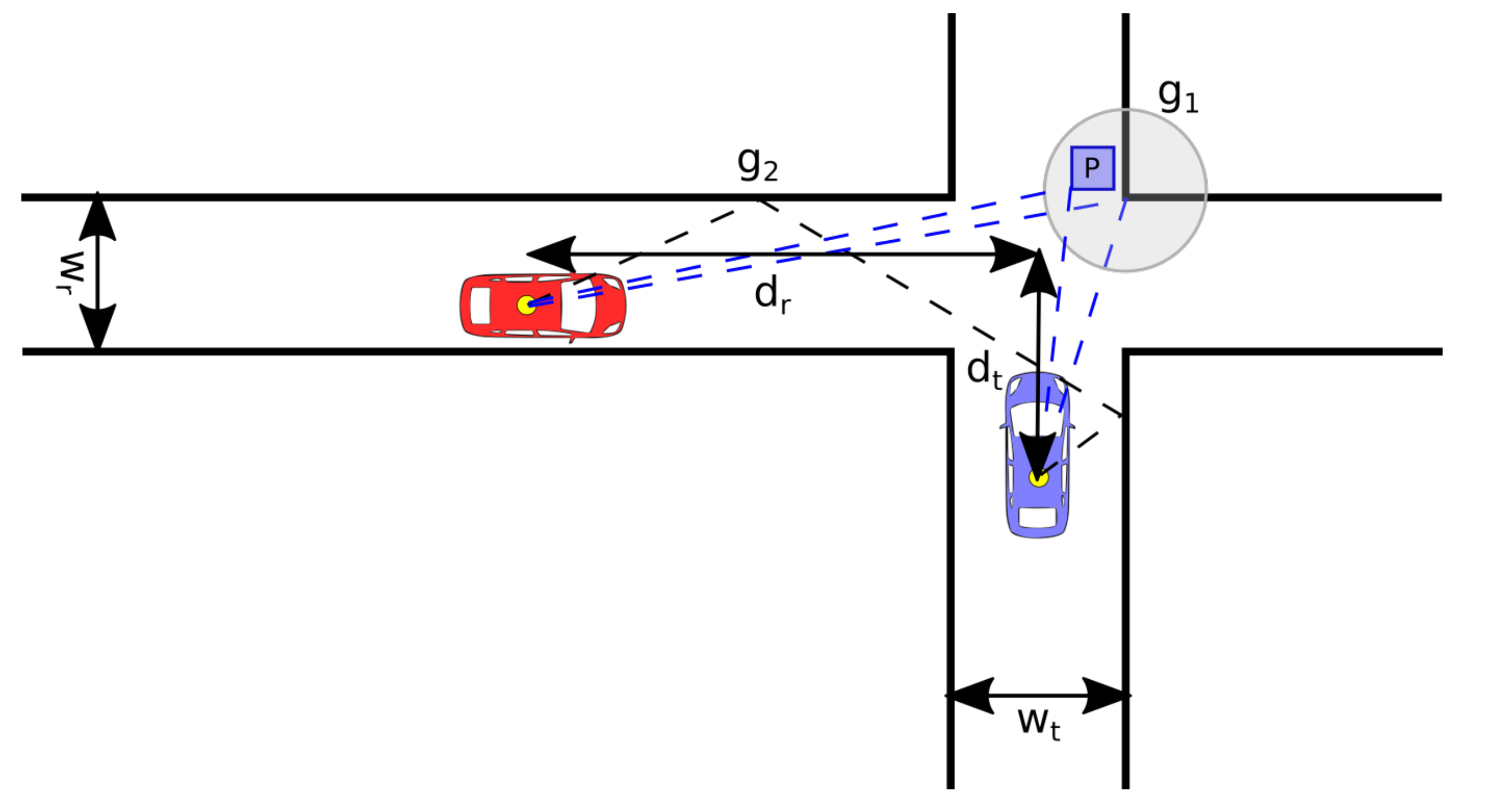
2.1. Channel Model
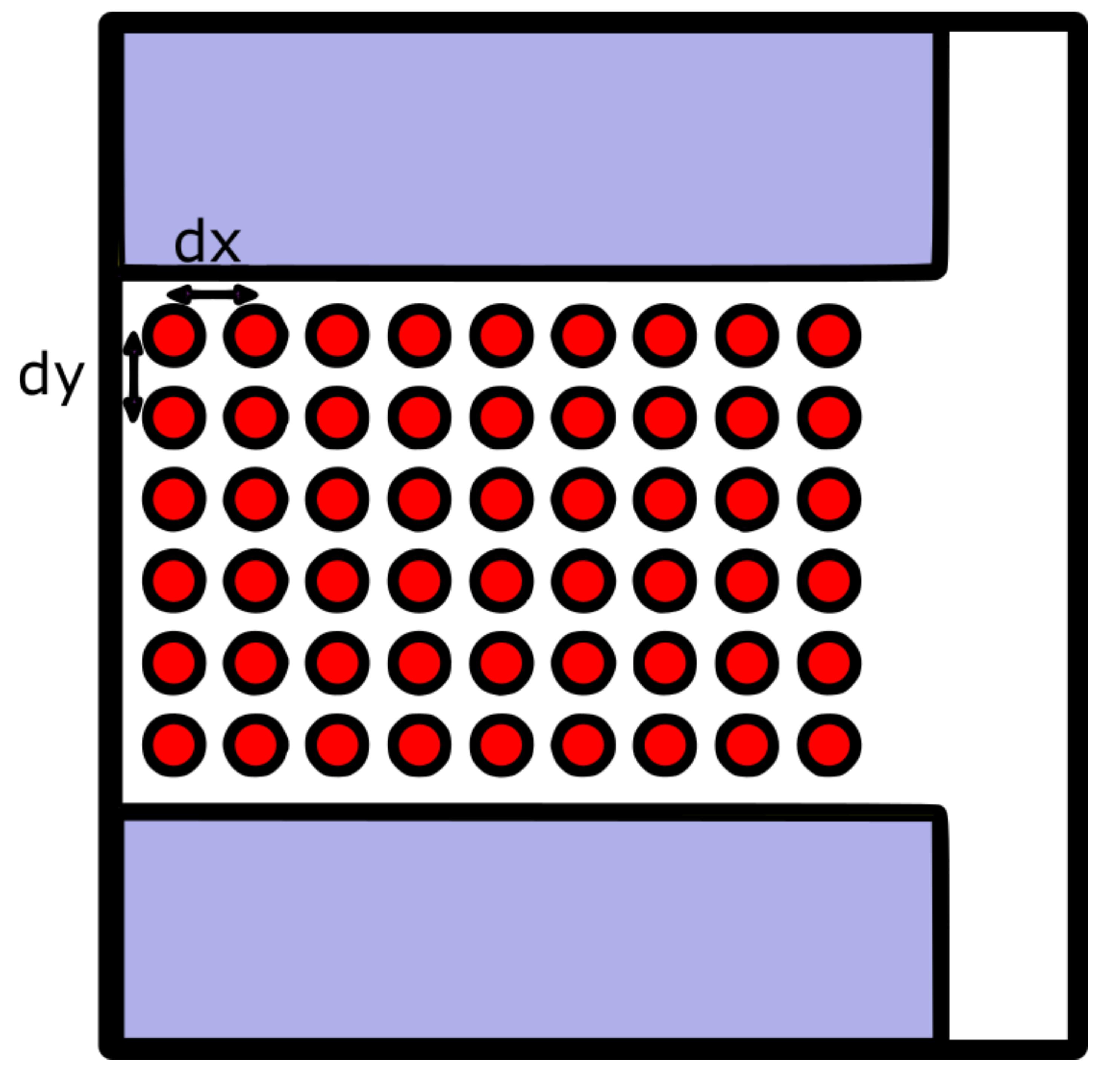
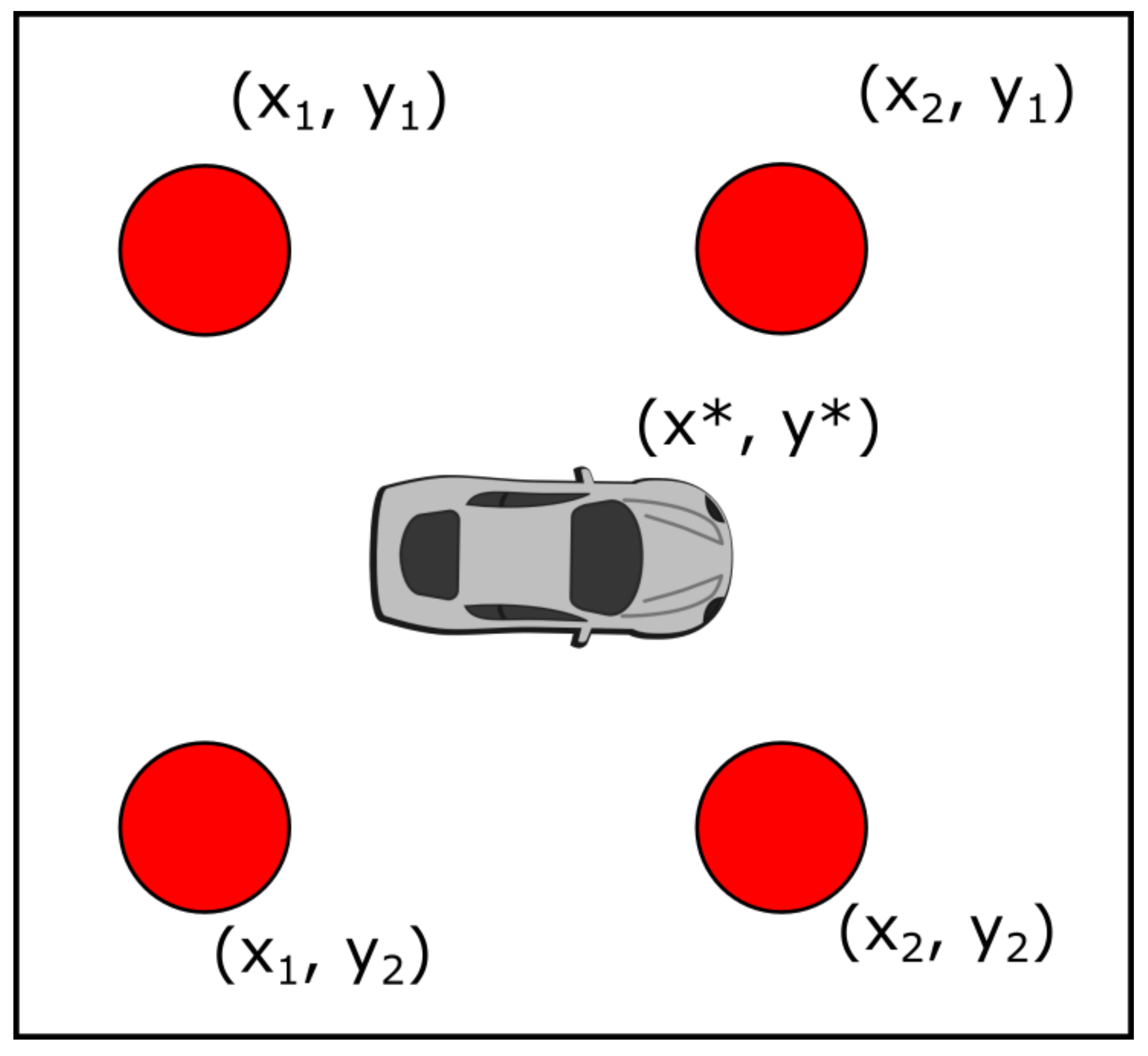
2.2. Antenna Array
3. Optimization Methods
3.1. Optimization Problem
3.2. Genetic Algorithm
3.3. Interpolation
3.4. Neuroevolution of Augmenting Topologies
4. Results and Discussion
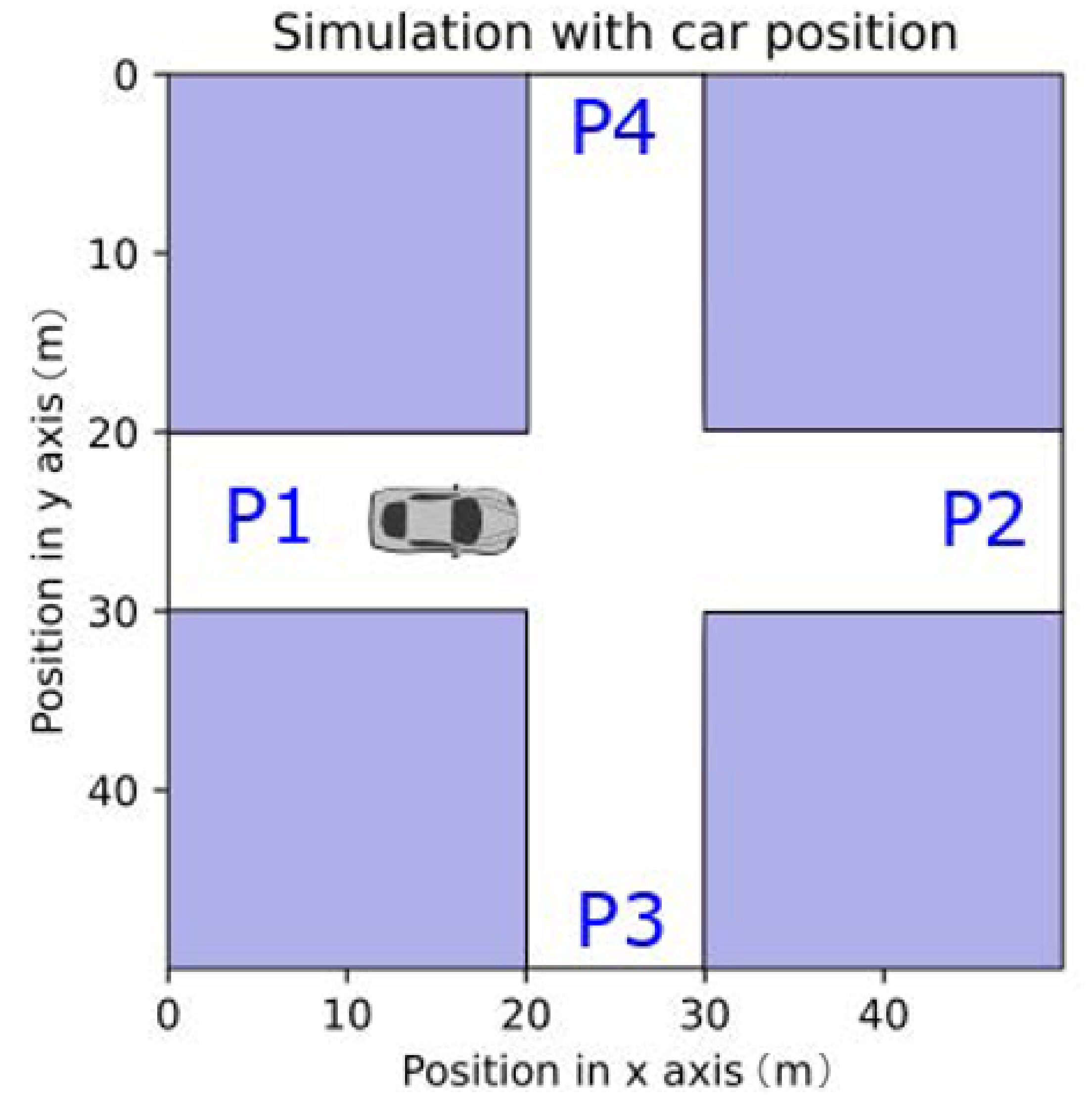
4.1. Simulation Scenario and Parameters
4.2. Performance Evaluation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AF | Array factor |
| GA | Genetic algorithm |
| LOS | Line of sight |
| MSCPSO | Mutation strategy-based particle swarm optimization |
| NEAT | Neuroevolution of augmenting topologies |
| PSO | Particle swarm optimization |
| RSU | Road side unit |
| VANET | Vehicular ad hoc network |
| V2V | Vehicle-to-vehicle |
References
- Bolufé, S.; Montejo-Sánchez, S.; Azurdia-Meza, C.A.; Céspedes, S.; Souza, R.D.; García, E.M. Dynamic Control of Beacon Transmission Rate and Power with Position Error Constraint in Cooperative Vehicular Networks. In Proceedings of the 33rd Annual ACM Symposium on Applied Computing, Pau, France, 9–13 April 2018. [Google Scholar]
- Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part 2: Specification of Cooperative Awareness Basic Service, Technical Specification (302 637-2) V1.4.1. 2019. Available online: https://standards.iteh.ai/catalog/standards/sist/27f4440f-5b38-4c63-92fd-2df5b1138565/sist-en-302-637-2-v1.4.1-2019 (accessed on 22 February 2021).
- Wang, Y.; Klautau, A.; Ribero, M.; Soong, A.C.; Heath, R.W. MmWave Vehicular Beam Selection with Situational Awareness using Machine Learning. IEEE Access 2019, 7, 87479–87493. [Google Scholar] [CrossRef]
- Singh, G.; Srivastava, A.; Bohara, V.A. Stochastic Geometry-Based Interference Characterization for RF and VLC-Based Vehicular Communication System. IEEE Syst. J. 2020. [Google Scholar] [CrossRef]
- Sommer, C.; Eckhoff, D.; Dressler, F. IVC in Cities: Signal Attenuation by Buildings and How Parked Cars Can Improve the Situation. IEEE Trans. Mob. Comput. 2014, 13, 1733–1745. [Google Scholar] [CrossRef]
- Schmidt, R.K.; Leinmuller, T.; Schoch, E.; Kargl, F.; Schafer, G. Exploration of adaptive beaconing for efficient intervehicle safety communication. IEEE Netw. 2010, 24, 14–19. [Google Scholar] [CrossRef] [Green Version]
- Abbas, T.; Bernado, L.; Thiel, A.; Mecklenbrauker, C.; Tufvesson, F. Radio Channel Properties for Vehicular Communication: Merging Lanes versus Urban Intersections. IEEE Veh. Technol. Mag. 2013, 8, 27–34. [Google Scholar] [CrossRef] [Green Version]
- Ortega, P.A.; Céspedes, S.; Montejo-Sánchez, S. Increasing Safety at Vehicular Intersections with a Controlled Retransmission of Beacons. In Proceedings of the IEEE Colombian Conference on Communications and Computing (COLCOM), Cali, Colombia, 7–8 August 2020. [Google Scholar]
- Ghafoor, K.Z.; Lloret, J.; Bakar, K.A.; Sadiq, A.S.; Mussa, S.A.B. Beaconing Approaches in Vehicular Ad Hoc Networks: A Survey. Wirel. Pers. Commun. 2013, 73, 885–912. [Google Scholar] [CrossRef]
- Kang, H.; Montejo Sánchez, S.; Azurdia-Meza, C.; Céspedes, S. Beamforming for Beaconing in V2V Communications. In Proceedings of the 2019 IEEE XXVI International Conference on Electronics, Electrical Engineering and Computing (INTERCON), Lima, Peru, 12–14 August 2019. [Google Scholar]
- Liu, C.; Huang, H.; Du, H.; Jia, X. Optimal RSUs Deployment in Vehicular Networks. In Proceedings of the International Conference on Web-Age Information Management, Macau, China, 16–18 June 2014; pp. 236–246. [Google Scholar]
- Fogue, M.; Sanguesa, J.; Martinez, F.; Marquez-Barja, J. Improving Roadside Unit Deployment in Vehicular Networks by Exploiting Genetic Algorithms. Appl. Sci. 2018, 8, 86. [Google Scholar] [CrossRef] [Green Version]
- Jalooli, A.; Song, M.; Xu, X. Delay Efficient Disconnected RSU Placement Algorithm for VANET Safety Applications. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017; pp. 1–6. [Google Scholar]
- Mehar, S.; Senouci, S.M.; Kies, A.; Zoulikha, M.M. An Optimized Roadside Units (RSU) placement for delay-sensitive applications in vehicular networks. In Proceedings of the 2015 12th Annual IEEE Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2015; pp. 121–127. [Google Scholar]
- IEEE 802.11 p Working Group. IEEE Standard for Information Technology—Local and Metropolitan Area Networks—Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 6: Wireless Access in Vehicular Environments; IEEE Press: Hoboken, NJ, USA, 2010; 11p, pp. 1–51. [Google Scholar] [CrossRef]
- Intelligent Transport Systems (ITS); Vehicular Communications; Basic Set of Applications; Part 3: Specifications of Decentralized Environmental Notification Basic Service, Technical Specification (302 637-3) V1.3.1. 2019. Available online: https://standards.iteh.ai/catalog/standards/sist/80aaa4b3-c813-4375-aa25-cd3081c736e7/sist-en-302-637-3-v1.3.1-2019 (accessed on 22 February 2021).
- Kang Kim, H.; Azurdia-Meza, C.; Estevez, C. Antenna Array Synthesis Through Genetic Algorithms for Urban V2V Communications: Preliminary Results. In Proceedings of the 2020 Congreso Estudiantil de Electrónica y Electricidad (INGELECTRA), Santiago, Chile, 1–3 April 2020. [Google Scholar]
- Becerra, R.; Bolufé, S.; Kang Kim, H.; Azurdia-Meza, C. Antenna Array Synthesis Through Particle Swarm Optimization for V2V Communications in Urban Intersections. In Proceedings of the 2020 IEEE Latin-American Conference on Communications (LATINCOM), Santo Domingo, Dominican Republic, 18–20 November 2020. [Google Scholar]
- Ahangiri, M.; Kaboli, M.; Mirtaheri, S.A. Design Beamforming Network of Linear Array for Base Station Antennas at 1.71–2.69 GHz by Using Genetic Algorithm. In Proceedings of the Iranian Conference on Electrical Engineering (ICEE), Mashhad, Iran, 8–10 May 2018; pp. 621–626. [Google Scholar]
- Wang, Y.; Gao, S.; Yu, H.; Zheng, T. Synthesis of Antenna Array by Complex-valued Genetic Algorithm. Int. J. Comput. Sci. Netw. Secur. 2011, 11, 91–96. [Google Scholar]
- Reddy, K.Y.; Kumar, R.B.; Jijenth, M.; Sahu, B.; Gangwar, V.S. Synthesis of large thinned planar antenna arrays using modified binary coded genetic algorithm. In Proceedings of the 2017 IEEE Applied Electromagnetics Conference (AEMC), Aurangabad, India, 19–22 December 2017; pp. 1–2. [Google Scholar]
- Zhao, H.; Xie, Z.; Wang, H.; Jin, J. Beam Shaping for Satellite Phased Array Antenna Using Dual Coding Genetic Algorithm. In Proceedings of the 2009 5th International Conference on Wireless Communications, Networking and Mobile Computing, Beijing, China, 24–26 September 2009; pp. 1–4. [Google Scholar]
- Fu, X.; Chen, X.; Hou, Q.; Wang, Z.; Yin, Y. An Improved Chaos Genetic Algorithm for T-Shaped MIMO Radar Antenna Array Optimization. Int. J. Antennas Propag. 2014, 2014, 631820. [Google Scholar] [CrossRef]
- Xu, Z.; Li, H.; Liu, Q.Z.; Li, J.Y. Pattern synthesis of conformal antenna array by the hybrid genetic algorithm. Prog. Electromagn. Res. 2008, 79, 75–90. [Google Scholar] [CrossRef] [Green Version]
- Raviteja, G.; Sridevi, K.; Jhansi Rani, A. Performance Evaluation of Smart Antennas Employing Adaptive Elliptical and Hexagonal Arrays using Particle Swarm Optimization and Genetic Algorithm. Indian J. Sci. Technol. 2016, 9, 1–7. [Google Scholar] [CrossRef]
- Stanley, K.O.; Miikkulainen, R. Evolving neural networks through augmenting topologies. Evol. Comput. 2002, 10, 99–127. [Google Scholar] [CrossRef] [PubMed]
- Wen, R.; Guo, Z.; Zhao, T.; Ma, X.; Wang, Q.; Wu, Z. Neuroevolution of augmenting topologies based musculor-skeletal arm neurocontroller. In Proceedings of the 2017 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Turin, Italy, 22–25 May 2017. [Google Scholar]
- Kristo, T.; Maulidevi, N.U. Deduction of fighting game countermeasures using Neuroevolution of Augmenting Topologies. In Proceedings of the 2016 International Conference on Data and Software Engineering (ICoDSE), Denpasar, Indonesia, 26–27 October 2016; pp. 1–6. [Google Scholar]
- Wallaschek, K.L.; Klose, R.; Almon, L.; Hollick, M. NEAT-TCP: Generation of TCP Congestion Control through Neuroevolution of Augmenting Topologies. In Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Mangel, T.; Klemp, O.; Hartenstein, H. A validated 5.9 GHz Non-Line-of-Sight path-loss and fading model for inter-vehicle communication. In Proceedings of the 11th International Conference on ITS Telecommunications, St. Petersburg, Russia, 23–25 August 2011; pp. 75–80. [Google Scholar]
- Nilsson, M.; Gustafson, C.; Abbas, T.; Tufvesson, F. A Path Loss and Shadowing Model for Multilink Vehicle-to-Vehicle Channels in Urban Intersections. Sensors 2018, 18, 4433. [Google Scholar] [CrossRef] [Green Version]
- Lambora, A.; Gupta, K.; Chopra, K. Genetic Algorithm—A Literature Review. In Proceedings of the 2019 International Conference on Machine Learning, Big Data, Cloud and Parallel Computing (COMITCon), Faridabad, India, 14–16 February 2019; pp. 380–384. [Google Scholar]
- Deb, K.; Deb, D. Analysing mutation schemes for real-parameter genetic algorithms. Int. J. Artif. Intell. Soft Comput. 2014, 4, 1–28. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, T.; Zhang, Q. An Autonomous Overtaking Maneuver Based on Relative Position Information. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–6. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| [31] | |
| [31] | |
| m | dB [31] |
| dB [31] | |
| Road width | 10 m [34] |
| Parameter | Value |
|---|---|
| Frequency | 5.9 GHz [15] |
| Data rate | 6 Mbps [15] |
| Beacon rate | 10 beacon/s [15] |
| Tx output power | 20 dBm [31] |
| Rx sensitivity | −67 dBm [31] |
| Model | Parameter | Value |
|---|---|---|
| GA | Individuals | 500 |
| Generations | 150 | |
| 1 m | ||
| 1 m | ||
| 10.0 | ||
| 0.5 | ||
| Crossover probability | 0.8 | |
| Mutation probability | 0.3 | |
| NEAT | Population size | 150 |
| Generations | 300 | |
| Activation function | sigmoid | |
| Input nodes | 2 | |
| Output nodes | 32 | |
| Probability to add connection | 0.7 | |
| Probability to delete connection | 0.3 | |
| Probability to add node | 0.4 | |
| Probability to delete node | 0.2 |
| Antenna | P1 (dBm) | P2 (dBm) | P3 (dBm) | P4 (dBm) |
|---|---|---|---|---|
| Isotropic antenna | ||||
| Beamforming with MSCPSO | ||||
| Beamforming with GA [17] | ||||
| Beamforming with NEAT |
| Antenna | P1 | P2 | P3 | P4 |
|---|---|---|---|---|
| Beamforming with MSCPSO | ||||
| Beamforming with GA | ||||
| Beamforming with NEAT | 100 | 100 | 100 | 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang Kim, H.; Becerra, R.; Bolufé, S.; Azurdia-Meza, C.A.; Montejo-Sánchez, S.; Zabala-Blanco, D. Neuroevolution-Based Adaptive Antenna Array Beamforming Scheme to Improve the V2V Communication Performance at Intersections. Sensors 2021, 21, 2956. https://doi.org/10.3390/s21092956
Kang Kim H, Becerra R, Bolufé S, Azurdia-Meza CA, Montejo-Sánchez S, Zabala-Blanco D. Neuroevolution-Based Adaptive Antenna Array Beamforming Scheme to Improve the V2V Communication Performance at Intersections. Sensors. 2021; 21(9):2956. https://doi.org/10.3390/s21092956
Chicago/Turabian StyleKang Kim, Hojin, Raimundo Becerra, Sandy Bolufé, Cesar A. Azurdia-Meza, Samuel Montejo-Sánchez, and David Zabala-Blanco. 2021. "Neuroevolution-Based Adaptive Antenna Array Beamforming Scheme to Improve the V2V Communication Performance at Intersections" Sensors 21, no. 9: 2956. https://doi.org/10.3390/s21092956
APA StyleKang Kim, H., Becerra, R., Bolufé, S., Azurdia-Meza, C. A., Montejo-Sánchez, S., & Zabala-Blanco, D. (2021). Neuroevolution-Based Adaptive Antenna Array Beamforming Scheme to Improve the V2V Communication Performance at Intersections. Sensors, 21(9), 2956. https://doi.org/10.3390/s21092956