
Analysis and Radiometric Calibration for Backscatter Intensity of Hyperspectral LiDAR Caused by Incident Angle Effect

 ,
,  ,
, 

Abstract
:1. Introduction
2. Materials and Methods
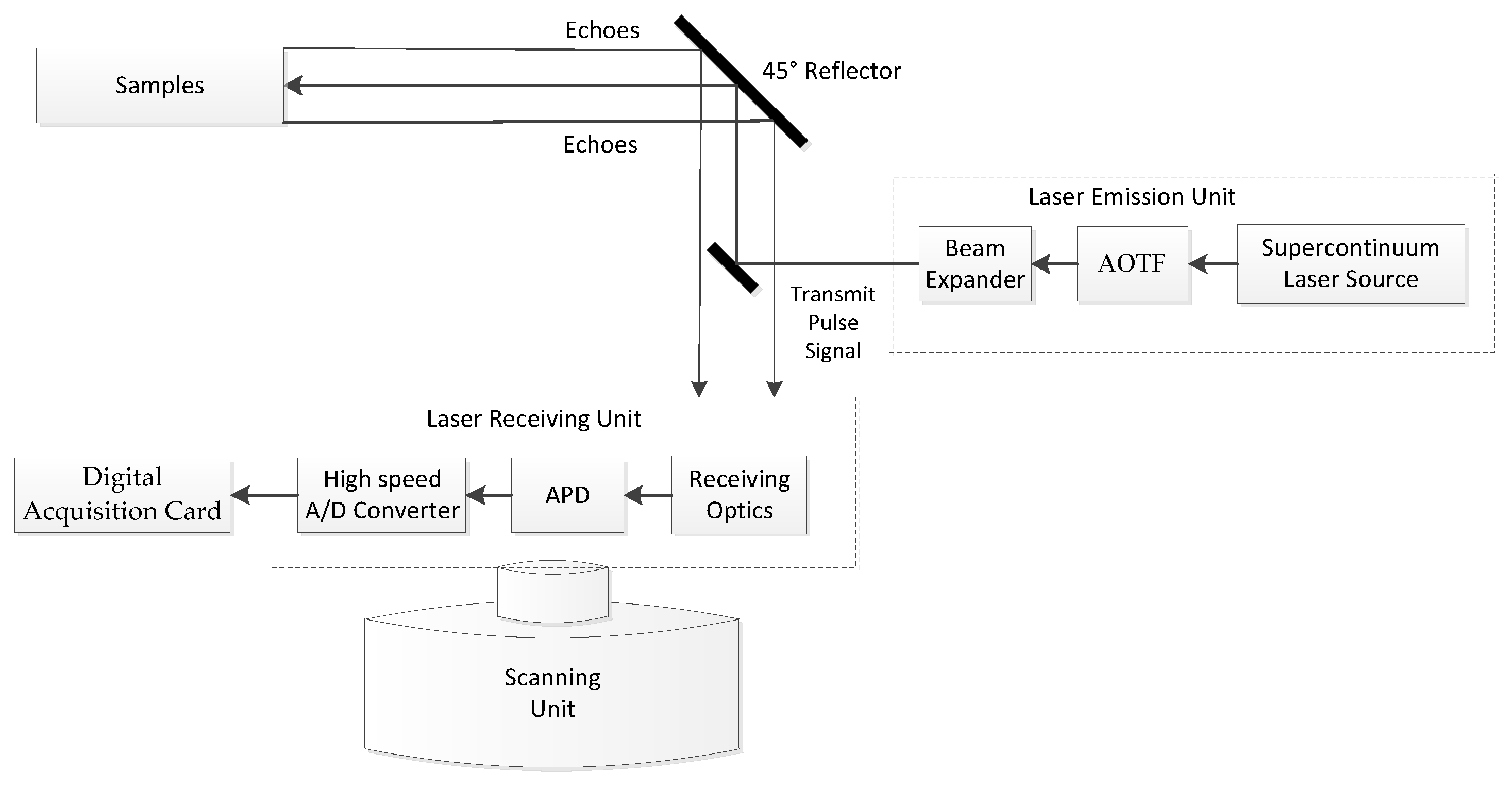
2.1. HSL System
2.2. Radiometric Calibration Model of Incident Angle Effect
2.2.1. Lidar Equation
2.2.2. Lambertian–Beckmann Model
2.2.3. Radiometric Calibration Model
2.3. Incidence Angle Experiments
3. Results
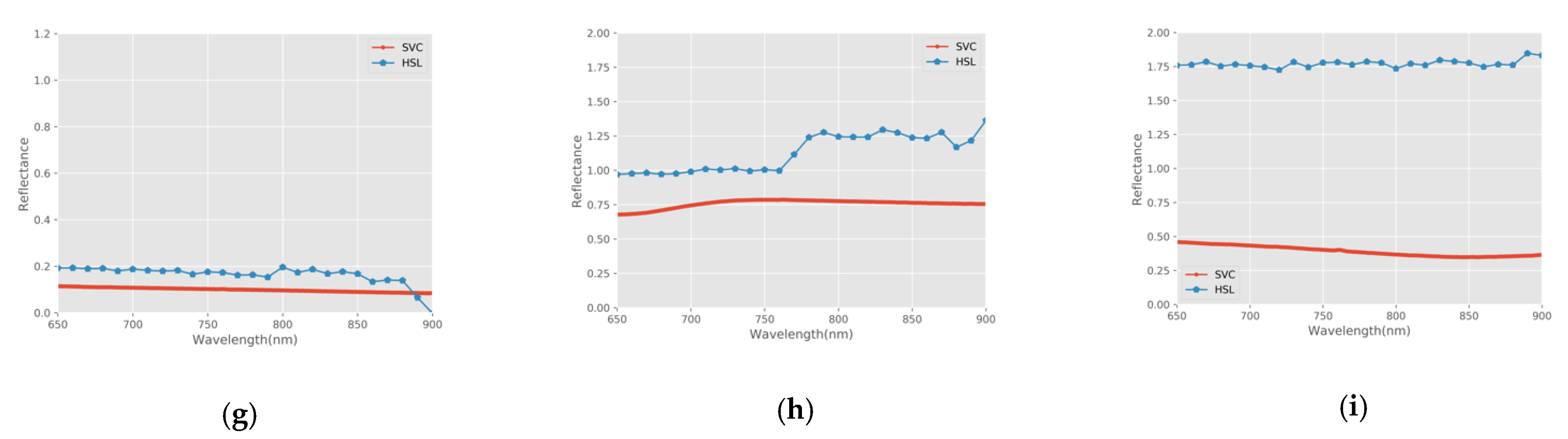
3.1. HSL and SVC Spectrometer Measurements
3.2. Incidence Angle Effect of Backscatter Intensity
3.3. Backscatter Intensity Calibration Based on Lambertian Beckmann Model
- For the three standard reflection boards, sidewalk brick, and the wood product in this experiment, the coefficient is close to 1, and the angle threshold is 0°, indicating that there is almost no specular reflection in these samples.
- The floor tile, the car shell sample, and the marble tile in this experiment are samples with obvious specular reflection characteristics. The diffuse reflection coefficient, , of floor tiles is about 0.52, and the roughness coefficient, m, is about 0.15. The diffuse reflection coefficient, , of the car shell sample is about 0.1, and the roughness coefficient, m, is about 0.21. The diffuse reflection coefficient, , of marble tile is about 0.4, and the roughness coefficient, m, is about 0.12. This result is consistent with the optical reflection characteristics of the sample itself. The specular reflection of the car shell sample is the most obvious, and it is consistent with Figure 6h.
- For the leaf samples in this experiment, the coefficient, , shows a significant trough in the range of visible wavelength and increases in the range of near-infrared wavelength. This trend is consistent with the red edge effect of leaves. This indicates that the leaves have a stronger specular reflection in the visible wavelength range. Roughness parameter m shows a relatively stable trend and represents the overall roughness of this target. For the yellow leaf of Fraxinus pennsylvanica, the diffuse reflection coefficient, , is close to 1 and remains unchanged. Therefore, the yellow leaf of Fraxinus pennsylvanica is closest to the Lambertian model.
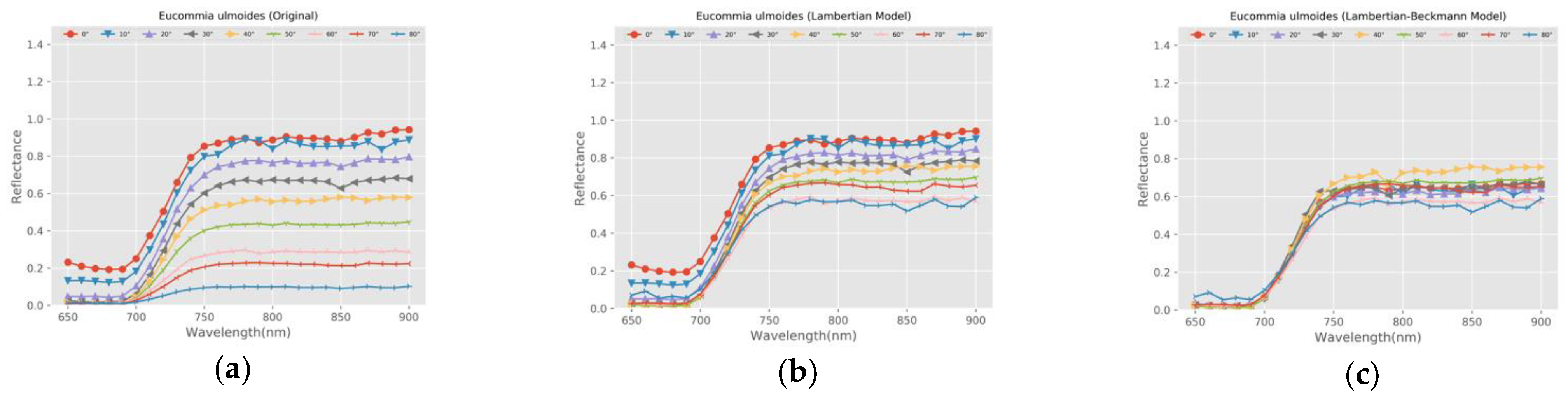
- The backscatter intensity of the glossy green leaf surface is higher than that of the matte or yellow leaf surface, especially near the normal direction. Figure 7b shows that Eucommia ulmoides has the lowest diffuse reflection coefficient and the highest specular backscatter intensity in all leaf samples. Combined with Figure 6m, it can be seen that the backscatter intensity of Eucommia ulmoides drops sharply between 0° and 20°.
- For non-leaf samples in this experiment, the specular reflection effect is similar in different wavelengths. For the leaf samples in the experiment, the differences of specular reflection effect and incident angle effect were different, and the specular reflection effect was larger in the visible region for waxy or glossy leaves. For rough and dull leaves, the effect of specular reflection is small or negligible. Therefore, the impact of the incident angle effect on different wavelengths is different. In the process of radiometric calibration, the angle effect in different wavelengths needs to be corrected separately.
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, Y.; Räikkönen, E.; Kaasalainen, S.; Suomalainen, J.; Hakala, T.; Hyyppä, J.; Chen, R. Two-channel hyperspectral lidar with a supercontinuum laser source. Sensors 2010, 10, 7057–7066. [Google Scholar] [CrossRef] [Green Version]
- Hakala, T.; Suomalainen, J.; Kaasalainen, S.; Chen, Y. Full waveform hyperspectral lidar for terrestrial laser scanning. Opt. Express 2012, 20, 7119–7127. [Google Scholar] [CrossRef]
- Li, W.; Jiang, C.; Chen, Y.; Hyyppä, J.; Tang, L.; Li, C.; Wang, S.W. A liquid crystal tunable filter-based hyperspectral lidar system and its application on vegetation red edge detection. IEEE Geosci. Remote Sens. Lett. 2019, 16, 291–295. [Google Scholar] [CrossRef]
- Hu, P.; Chen, Y.; Jiang, C.; Lin, Q.; Li, W.; Qi, J.; Yu, L.; Shao, H.; Huang, H. Spectral observation and classification of typical tree species leaves based on indoor hyperspectral lidar. J. Infrared Millim. Waves 2020, 39, 372–380. [Google Scholar]
- Lin, Y.; West, G. Retrieval of effective leaf area index (LAIe) and leaf area density (LAD) profile at individual tree level using high density multi-return airborne LiDAR. Int. J. Appl. Earth Obs. 2016, 50, 150–158. [Google Scholar] [CrossRef]
- Zhu, X.; Wang, T.; Darvishzadeh, R.; Skidmore, A.K.; Niemann, K.O. 3D leaf water content mapping using terrestrial laser scanner backscatter intensity with radiometric correction. ISPRS J. Photogramm. Remote Sens. 2015, 110, 14–23. [Google Scholar] [CrossRef]
- Du, L.; Shi, S.; Gong, W.; Yang, J.; Sun, J.; Mao, F. Wavelength selection of hyperspectral lidar based on feature weighting for estimation of leaf nitrogen content in rice. Int. Arch. Photogramm. Remote Sens. 2016, 41, 9–13. [Google Scholar] [CrossRef] [Green Version]
- Bi, K.; Xiao, S.; Gao, S.; Zhang, C.; Huang, N.; Niu, Z. Estimating Vertical Chlorophyll Concentrations in Maize in Different Health States Using Hyperspectral LiDAR. IEEE Trans. Geosci. Remote Sens. 2020, 58, 8125–8133. [Google Scholar] [CrossRef]
- Li, W.; Sun, G.; Niu, Z.; Gao, S.; Qiao, H.L. Estimation of leaf biochemical content using a novel hyperspectral full-waveform LiDAR system. Remote Sens. Lett. 2014, 5, 693–702. [Google Scholar] [CrossRef]
- Tan, K.; Cheng, X.; Cheng, X. Modeling hemispherical reflectance for natural surfaces based on terrestrial laser scanning backscattered intensity data. Opt. Express 2016, 24, 22971–22988. [Google Scholar] [CrossRef]
- Fang, W.; Huang, X.; Zhang, F.; Li, D. Intensity correction of terrestrial laser scanning data by estimating laser transmission function. IEEE Trans. Geosci. Remote Sens. 2014, 53, 942–951. [Google Scholar] [CrossRef]
- Xu, T.; Xu, L.; Yang, B.; Li, X.; Yao, J. Terrestrial Laser Scanning Intensity Correction by Piecewise Fitting and Overlap-Driven Adjustment. Remote Sens. 2017, 9, 1090. [Google Scholar] [CrossRef] [Green Version]
- Oren, M.; Nayar, S.K. Generalization of the Lambertian model and implications for machine vision. Int. J. Comput. Vis. 1995, 14, 227–251. [Google Scholar] [CrossRef]
- Tan, K.; Cheng, X. Specular reflection effects elimination in terrestrial laser scanning intensity data using Phong model. Remote Sens. 2017, 9, 853. [Google Scholar] [CrossRef] [Green Version]
- Ding, Q.; Chen, W.; King, B.; Liu, Y.; Liu, G. Combination of overlap-driven adjustment and Phong model for LiDAR intensity correction. ISPRS J. Photogramm. Remote Sens. 2013, 75, 40–47. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Akerblom, M.; Nevalainen, O.; Hakala, T.; Kaasalainen, M. Uncertainty in multispectral lidar signals caused by incidence angle effects. Interface Focus 2018, 8, 20170033. [Google Scholar] [CrossRef] [Green Version]
- Vain, A.; Kaasalainen, S.; Pyysalo, U.; Krooks, A.; Litkey, P. Use of naturally available reference targets to calibrate airborne laser scanning intensity data. Sensors 2009, 9, 2780–2796. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Pyysalo, U.; Krooks, A.; Vain, A.; Kukko, A.; Hyyppä, J.; Kaasalainen, M. Absolute radiometric calibration of ALS intensity data: Effects on accuracy and target classification. Sensors 2011, 11, 10586–10602. [Google Scholar] [CrossRef]
- Tan, K.; Cheng, X.; Ding, X.; Zhang, Q. Intensity data correction for the distance effect in terrestrial laser scanners. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 304–312. [Google Scholar] [CrossRef]
- Li, W. An Acousto-Optic Tunable Filter Based Hyper-Spectral LiDAR System and Its Application. Ph.D. Thesis, University of Chinese Academy of Sciences, Beijing, China, 2018. [Google Scholar]
- Jiang, C.; Chen, Y.; Wu, H.; Li, W.; Zhou, H.; Bo, Y.; Shao, H.; Song, S.; Puttonen, E.; Hyyppä, J. Study of a High Spectral Resolution Hyperspectral LiDAR in Vegetation Red Edge Parameters Extraction. Remote Sens. 2019, 11, 2007. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Gao, S.; Li, W.; Bi, K.; Huang, N.; Niu, Z.; Sun, G. Radiometric Calibration for Incidence Angle, Range and Sub-Footprint Effects on Hyperspectral LiDAR Backscatter Intensity. Remote Sens. 2020, 12, 2855. [Google Scholar] [CrossRef]
- Hu, P.; Huang, H.; Chen, Y.; Qi, J.; Li, W.; Jiang, C.; Wu, H.; Tian, W.; Hyyppä, J. Analyzing the Angle Effect of Leaf Reflectance Measured by Indoor Hyperspectral Light Detection and Ranging (LiDAR). Remote Sens. 2020, 12, 919. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Li, W.; Hyyppä, J.; Wang, N.; Jiang, C.; Meng, F.; Tang, L.; Puttonen, E.; Li, C. A 10-nm Spectral Resolution Hyperspectral LiDAR System Based on an Acousto-Optic Tunable Filter. Sensors 2019, 19, 1620. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dai, Y. Principle of LiDAR; Electronic Industry Press: Beijing, China, 2010. [Google Scholar]
- Beckmann, P.; Spizzichino, A. The Scattering of Electromagnetic Waves from Rough Surfaces; Artech Print on Demand: New York, NY, USA, 1987. [Google Scholar]
- Hancock, S.; Gaulton, R.; Danson, F.M. Angular Reflectance of Leaves with a Dual-Wavelength Terrestrial Lidar and Its Implications for Leaf-Bark Separation and Leaf Moisture Estimation. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3084–3090. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Samples | Photos | Samples | Photos |
|---|---|---|---|
| 99% standard reference board |  | 70% standard reference board |  |
| 40% standard reference board |  | Wood product |  |
| Sidewalk brick |  | Floor tile |  |
| Marble tile |  | A car shell sample |  |
| Fraxinus pennsylvanica |  | Yellow leaf of Fraxinus pennsylvanica |  |
| Eucommia ulmoides |  | Magnolia denudate |  |
| Codiaeum variegatum |  | Ficus elastic |  |
| Wavelength (nm) | ||||||||
|---|---|---|---|---|---|---|---|---|
| Floor Tile | Car Shell Sample | Marble Tile | Fraxinus Pennsylvanica | Eucommia Ulmoides | Magnolia Denudate | Ficus Elastic | Codiaeum Variegatum | |
| 650 | 10 | 30 | 10 | 20 | 20 | 20 | 30 | 20 |
| 660 | 10 | 30 | 10 | 20 | 20 | 30 | 30 | 30 |
| 670 | 10 | 30 | 10 | 30 | 20 | 30 | 20 | 20 |
| 680 | 10 | 30 | 10 | 30 | 20 | 30 | 20 | 20 |
| 690 | 10 | 30 | 10 | 20 | 20 | 30 | 20 | 30 |
| 700 | 10 | 30 | 10 | 20 | 20 | 20 | 20 | 20 |
| 710 | 10 | 30 | 10 | 0 | 20 | 20 | 10 | 20 |
| 720 | 10 | 30 | 10 | 0 | 20 | 20 | 0 | 10 |
| 730 | 10 | 30 | 10 | 0 | 20 | 0 | 0 | 0 |
| 740 | 10 | 30 | 10 | 0 | 20 | 0 | 0 | 0 |
| 750 | 10 | 30 | 20 | 0 | 20 | 0 | 0 | 0 |
| 760 | 10 | 30 | 10 | 0 | 20 | 0 | 0 | 0 |
| 770 | 10 | 30 | 20 | 0 | 20 | 0 | 20 | 0 |
| 780 | 10 | 30 | 20 | 0 | 30 | 0 | 30 | 0 |
| 790 | 10 | 30 | 20 | 0 | 30 | 0 | 20 | 0 |
| 800 | 10 | 30 | 20 | 0 | 30 | 0 | 30 | 0 |
| 810 | 10 | 30 | 10 | 0 | 30 | 0 | 20 | 0 |
| 820 | 10 | 30 | 10 | 0 | 30 | 0 | 20 | 0 |
| 830 | 10 | 30 | 20 | 0 | 30 | 0 | 40 | 0 |
| 840 | 10 | 30 | 20 | 0 | 30 | 0 | 30 | 10 |
| 850 | 10 | 30 | 20 | 0 | 20 | 0 | 30 | 10 |
| 860 | 20 | 30 | 10 | 0 | 30 | 0 | 30 | 10 |
| 870 | 20 | 30 | 10 | 0 | 20 | 0 | 50 | 20 |
| 880 | 20 | 30 | 10 | 0 | 20 | 10 | 40 | 20 |
| 890 | 20 | 30 | 10 | 0 | 20 | 0 | 40 | 20 |
| 900 | 20 | 20 | 30 | 0 | 30 | 0 | 30 | 10 |
| Samples | Calibration Type | The Mean of the Reflectance Standard Deviations of All Wavelengths |
|---|---|---|
| 70% standard reference board | Before calibration | 0.244 |
| Lambertian Model | 0.119 | |
| Lambertian–Beckmann Model | 0.119 | |
| Lambertian–Beckmann Model (with incidence angle less than 70°) | 0.035 | |
| 40% standard reference board | Before calibration | 0.122 |
| Lambertian Model | 0.108 | |
| Lambertian–Beckmann Model | 0.108 | |
| Lambertian–Beckmann Model (with incidence angle less than 70°) | 0.023 | |
| Wood product | Before calibration | 0.216 |
| Lambertian Model | 0.134 | |
| Lambertian–Beckmann Model | 0.134 | |
| Lambertian–Beckmann Model (with incidence angle less than 70°) | 0.037 | |
| Sidewalk brick | Before calibration | 0.171 |
| Lambertian Model | 0.153 | |
| Lambertian–Beckmann Model | 0.153 | |
| Lambertian–Beckmann Model (with incidence angle less than 70°) | 0.040 | |
| Floor tile | Before calibration | 0.326 |
| Lambertian Model | 0.24 | |
| Lambertian–Beckmann Model | 0.128 | |
| Lambertian–Beckmann Model (with incidence angle less than 70°) | 0.0486 | |
| Marble tile | Before calibration | 0.052 |
| Lambertian Model | 0.058 | |
| Lambertian–Beckmann Model | 0.034 | |
| Lambertian–Beckmann Model (with incidence angle less than 70°) | 0.015 | |
| Car shell sample | Before calibration | 0.562 |
| Lambertian Model | 0.562 | |
| Lambertian–Beckmann Model | 0.062 | |
| Lambertian–Beckmann Model (with incidence angle less than 70°) | 0.051 | |
| Fraxinus pennsylvanica | Before calibration | 0.166 |
| Lambertian Model | 0.05 | |
| Lambertian–Beckmann Model | 0.048 | |
| Lambertian–Beckmann Model (with incidence angle less than 70°) | 0.028 | |
| Yellow leaf of Fraxinus pennsylvanica | Before calibration | 0.11 |
| Lambertian Model | 0.075 | |
| Lambertian–Beckmann Model | 0.075 | |
| Lambertian–Beckmann Model (with incidence angle less than 70°) | 0.043 | |
| Eucommia ulmoides | Before calibration | 0.222 |
| Lambertian Model | 0.105 | |
| Lambertian–Beckmann Model | 0.04 | |
| Lambertian–Beckmann Model (with incidence angle less than 70°) | 0.035 | |
| Magnolia denudate | Before calibration | 0.1 |
| Lambertian Model | 0.043 | |
| Lambertian–Beckmann Model | 0.04 | |
| Lambertian–Beckmann Model (with incidence angle less than 70°) | 0.022 | |
| Ficus elastic | Before calibration | 0.141 |
| Lambertian Model | 0.098 | |
| Lambertian–Beckmann Model | 0.059 | |
| Lambertian–Beckmann Model (with incidence angle less than 70°) | 0.046 | |
| Codiaeum variegatum | Before calibration | 0.227 |
| Lambertian Model | 0.185 | |
| Lambertian–Beckmann Model | 0.176 | |
| Lambertian–Beckmann Model (with incidence angle less than 70°) | 0.048 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, W.; Tang, L.; Chen, Y.; Li, Z.; Zhu, J.; Jiang, C.; Hu, P.; He, W.; Wu, H.; Pan, M.; et al. Analysis and Radiometric Calibration for Backscatter Intensity of Hyperspectral LiDAR Caused by Incident Angle Effect. Sensors 2021, 21, 2960. https://doi.org/10.3390/s21092960
Tian W, Tang L, Chen Y, Li Z, Zhu J, Jiang C, Hu P, He W, Wu H, Pan M, et al. Analysis and Radiometric Calibration for Backscatter Intensity of Hyperspectral LiDAR Caused by Incident Angle Effect. Sensors. 2021; 21(9):2960. https://doi.org/10.3390/s21092960
Chicago/Turabian StyleTian, Wenxin, Lingli Tang, Yuwei Chen, Ziyang Li, Jiajia Zhu, Changhui Jiang, Peilun Hu, Wenjing He, Haohao Wu, Miaomiao Pan, and et al. 2021. "Analysis and Radiometric Calibration for Backscatter Intensity of Hyperspectral LiDAR Caused by Incident Angle Effect" Sensors 21, no. 9: 2960. https://doi.org/10.3390/s21092960
APA StyleTian, W., Tang, L., Chen, Y., Li, Z., Zhu, J., Jiang, C., Hu, P., He, W., Wu, H., Pan, M., Lu, J., & Hyyppä, J. (2021). Analysis and Radiometric Calibration for Backscatter Intensity of Hyperspectral LiDAR Caused by Incident Angle Effect. Sensors, 21(9), 2960. https://doi.org/10.3390/s21092960