
UTM-Chain: Blockchain-Based Secure Unmanned Traffic Management for Internet of Drones

 , , ,
, , , 
Abstract
:1. Introduction
Problem Statement and Contribution
- We carried out a survey of the security issues related to Unmanned Traffic Management (UTM).
- We leveraged the blockchain technology to secure the flight/mission plan and to guarantee safe and efficient flight planning.
- We proposed to use decentralized databases to mitigate centralized storage vulnerabilities.
- We implemented the proposed architecture using the Hyperledger Fabric [33] as a framework.
- We evaluated the performance of the proposed architecture using cAdvisor.
2. Related Work

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scheme and Year | Contribution | Technology Used | Network Model | Validation Tool | 1 | 2 | 3 | Limitations |
|---|---|---|---|---|---|---|---|---|
| Yoon et al. [36] (2017) | Enhancing UAV data security by developing an additional encrypted communication channel | AES encryption | Multi-UAV, ground station and middleware | Raspberry Pi, Aircrack-ng | N | Y | N | High overhead because of utilization of encryption channels Requiring extra hardwareHigh delay |
| Kapitonov et al. [41] (2017) | Developed a secure communication protocol among UAVs | Ethereum, private and public keys | Communication system between agents (DAOs) in a P2P network | Solidity, Smart contract ROS, Inter-Planetary File System; utilization of docker virtualization to implement AIRA protocol | Y | Y | Y | Issues of AIRA protocol were not discussedthere is no investigation of data privacy |
| Sharma et al. [42] (2017) | Securely relay drone information via blockchain | Public and private keys, UAVs, BC | UAVNET | Smart contracts | Y | N | Y | Cannot be applied to IoD |
| Liang et al. [43] (2017) | Ensure the secure communication and integrity of data collected from drones using blockchain and cloud storage | Chainpoint, Ubuntu, Apache | The network is composed of drone, control system, blockchain network, cloud database, and cloud server | POW, bitcoin | Y | Y | Y | It is not practical to minimize the drones’ burden by using the traditional cloud server together with blockchain technologyTheoretical Explanation |
| Han et al. [38] (2017) | Encrypt drone-GCS communication | Elliptic Curve Crypto-graphy (ECC) and RSA | The network is composed of one UAV and a ground station | N/A | N | N | N | Public key cryptography depends on the third-party authority |
| Lin et al. [39] (2018) | Propose mutual authentication between drones and ground stations for secure communication in IoD and secure data sharing among collaborating drones | Identity-based encryption (IBE) | IoD, drone, Certificate authority (CA), cloud | N/A | Y | N | N | No detailed constructions are proposed |
| Ferrer et al. [40] (2018) | Provide BC solution to entity validation and data confidentiality in swarm robotics | Key and digital signature crypto-graphy, UAV, BC | Drones | N/A | N | N | Y | Description of the approach is quickly provided, and no implementations or simulations were realized |
| Cui et al. [35] and Zhang et al. [34] (2018–2019) | Control the UAV trajectory jointly with the transmit power allocation to maximize the UAV’s average secrecy rate over a given flight time | Adjusting UAV trajectory and transmitting power by using a physical-layer based approach | A simple network of one UAV and a ground node | Simulation | Y | N | N | How this solution will work with multiple UAVs ? |
| Choudhary et al. [37] (2019) | Secure the trajectory of UAV using a security framework based on a deep neural network, which integrates an efficient MAC protocol controlled by Macaulay duration | MAC protocol, deep neural network | Several types of communication links are used in the system including UAV-to-UAV, UAV-to-device, and virtual | Simulation-based evaluations | N | N | N | Location privacy is not considered |
| García-Magari et al. [45] (2019) | Improving the security of the UAV network by using blockchain-based techniques | PoA, smart contract, asymmetric key encryption | Multi-UAV | The proposed model is validated via Agent based simulator (ABS-Security UAV), Hyperledger, supporting mobile ad-hoc network | N | Y | Y | Focus only on detecting whether UAV is hijacked or not |
3. Security Issues in Unmanned Traffic Management (UTM)
3.1. Attacks on UAV
3.1.1. Physical Attacks
3.1.2. Cyber Attacks
- Hijacking: is the major researched area in UAV cybersecurity. The third-party can send unauthorized commands to control drones when drones are properly protected or their communication is not secured. Correspondingly, it can cause serious consequences such as failed missions.
- GPS spoofing attacks: GPS is used for pathfinding in transportation and enables a drone’s navigation. A drone that uses GPS is vulnerable to spoofing attacks due to the lack of encryption. In a GPS spoofing attack, fake GPS signals stronger than the original unencrypted GPS signals can be transmitted into the drone to mislead the UAV’s path. GPS spoofed signals are providing false altitude and longitude data to the drone, thus letting it change its trajectory. This attack could result in a loss of accurate positional information, which may even threaten the drone and the safety of nearby occupants in the UTM.
- GPS jamming attacks: Other attacks on drones involve GPS jamming attacks. The jammer may intend jamming of the GPS signal that navigates the path of the UAV. In this scenario, the drone will be unable to determine its location and trajectory.
3.2. Attacks on GCS
3.3. Attacks on Data Communication Link
- Denial of Service (DoS/ DDoS): Denial of Service attacks compromises UTM availability, in particular by flooding the network with fake requests, thereby the network becomes interrupted, making the UTM system appear unavailable and preventing other legitimate packets from being sent. Correspondingly, the drone cannot receive authorized control messages and data, which leads to failed missions. In a DDoS attack, a large number of unauthorized packets are transmitted over the communication links by an adversary to the UAV or the GCS that can cause network congestion preventing proper communication between the UAV and the GCS.In attacks under denial of service categories, such as jamming, the adversary aims to disrupt the communication link between the UAV and other entities in its network through interference or collision before the reception. Particularly, the jammer within a specific radius at the frequency of the drones generates interference within radio channels. As a result, a receiver such as a ground station or a drone cannot properly receive signals transmitted by an unauthorized sender that can cause unavailable services.
- Traffic analysis attack: Traffic analysis attack is a passive attack, which is performed by a third party to examine the UTM traffic to get useful information from the UTM components and network. The traffic contains sensitive data exchanged between UTM nodes like mission plan, location, and telemetry data.
- GCS Control Signals spoofing: If the wireless communication link between the UAV and the GCS is not protected, spoof MAVLink (Micro Air Vehicle Link) commands can be sent by unauthorized parties to take over the UAV illegitimately.
- Man in the middle: The M-I-T-M attack can be successfully established on telemetry and Command-and-Control (C2) data links. The attacker can intercept the exchanged messages between UAV and GCS. Particularly, the exchanged packets can be captured by attackers who then can extract the important information, relaying the packet with modified data. This makes both the drone and the ground control believe that they are communicating with each other successfully without any interception.
- Eavesdropping: When the connection between UAVs and GCS is not secured or encrypted, an attacker can eavesdrop on the exchanged messages between these. Correspondingly, the attacker can extract information (e.g., control and command data, location of drones, and flying speed) from the exchanged messages. Eavesdropping is a passive attack; however, the extracted information via eavesdropping can be used as a foundation for active attacks such as hijacking that controls the UAVs and has a large impact on UAV missions.
- Identity spoofing: When the MAVLink is not encrypted, authentication credentials of the drone or GCS can be captured by the third party. Then, the third party can use the authentication credentials to send messages to the receivers.
- False location update: When the communication between UAVs and GCS is not secure enough, the attack can use the data link to send false UAV location data to GCS that can cause wrong trajectory and failed UAVs missions.
3.4. Attacks on Cyber Systems (Cloud and Internet)
- SQL and NoSQL injection attack: If a database is not designed and managed properly and securely, the database may have some vulnerabilities that can be exploited by hackers who can send malicious SQL code to gain access to backend databases [47,48,49]. If the access is successfully got, they can control the webserver or manipulate the contents of the databases [50,51].
- Insecure APIs: In general, cloud infrastructures offer APIs for accessing and manipulating data. However, APIs may have vulnerabilities that can be exploited by attackers [50]. Particularly, software developers who design and develop APIs may use open-source code to accelerate the developing process. However, the open-sources may be insecure and have some pieces of code unknowingly tainted with cryptocurrency mining code. It is required that the API needs to support secure communication and other security algorithms to guarantee a high level of security related to authentication, access control, confidentiality/privacy, encryption, segregation of data and privileges, and error handling.
- Malware injection: Cross-Site Scripting is one of the most widely used ways of malware injection [49,50]. In Cross-Site Scripting, Malicious scripts including JavaScript, VBScript, ActiveX, and HTML can be injected by attackers into a vulnerable web page with the purpose of executing the malicious scripts on a web browser of a victim [52]. Correspondingly, the session cookies could be stolen or the victim could be tricked into using a malicious link.
4. UTM-Chain System Architecture
4.1. Proposed System Overview
- Decentralization: UAVs, GCS, and users can communicate and exchange data directly through a secure and trusted blockchain without any third-party entity involvement. Moreover, data is distributed across a blockchain network and stored in an off-chain database.
- Collective verification: Because of blockchain’s distributed characteristics, transaction data should be approved and verified by the participants (e.g., nodes), thus eliminating the need for a controlling authority.
- Tamper resistance: When transaction data is added into the blockchain, it is protected and cannot be tampered (e.g., modified or deleted) thanks to the cryptography. Particularly, each block of a blockchain has a cryptographic hash of the previous block. Therefore, a data of a particular block cannot be modified without the alternation of all subsequent blocks, which is almost impossible.
- Data Integrity: The data integrity ensures the accuracy and consistency of data in secure transmission and storage. In blockchain, Cryptographic Hash Functions are used to ensure the integrity of the data transmitted by IoD devices. The integrity of this data is also guaranteed by the consensus mechanism used in the block mining process [54]. On the other hand, once the data or information is written in a block, it can no longer be deleted or modified since its integrity is intrinsically provided by the way it is chained to other blocks.
- Availability: Integrating blockchain technique in IoD enables higher availability because of blockchain’s distributed characteristics, considering that multiple copies of the entire ledger are stored on each distributed node in the blockchain network. If a UAV is under attack, the rest of the blockchain nodes keep on working and data is always available.
- Data origin authentication: All nodes in blockchain are capable of verifying the authenticity of the data transmitted, with the help of digital signature cryptography. Thus, data authentication between UAVs, GCS, and users is guaranteed.
- Identity management: Identification of nodes can be achieved by using blockchain through the use of pseudonymous addresses similar to Bitcoin addresses.
- Privacy: In blockchain, transaction history is publicly available and any node can join and access details about transactions, but it cannot access identifying information about the node making those transactions [53].
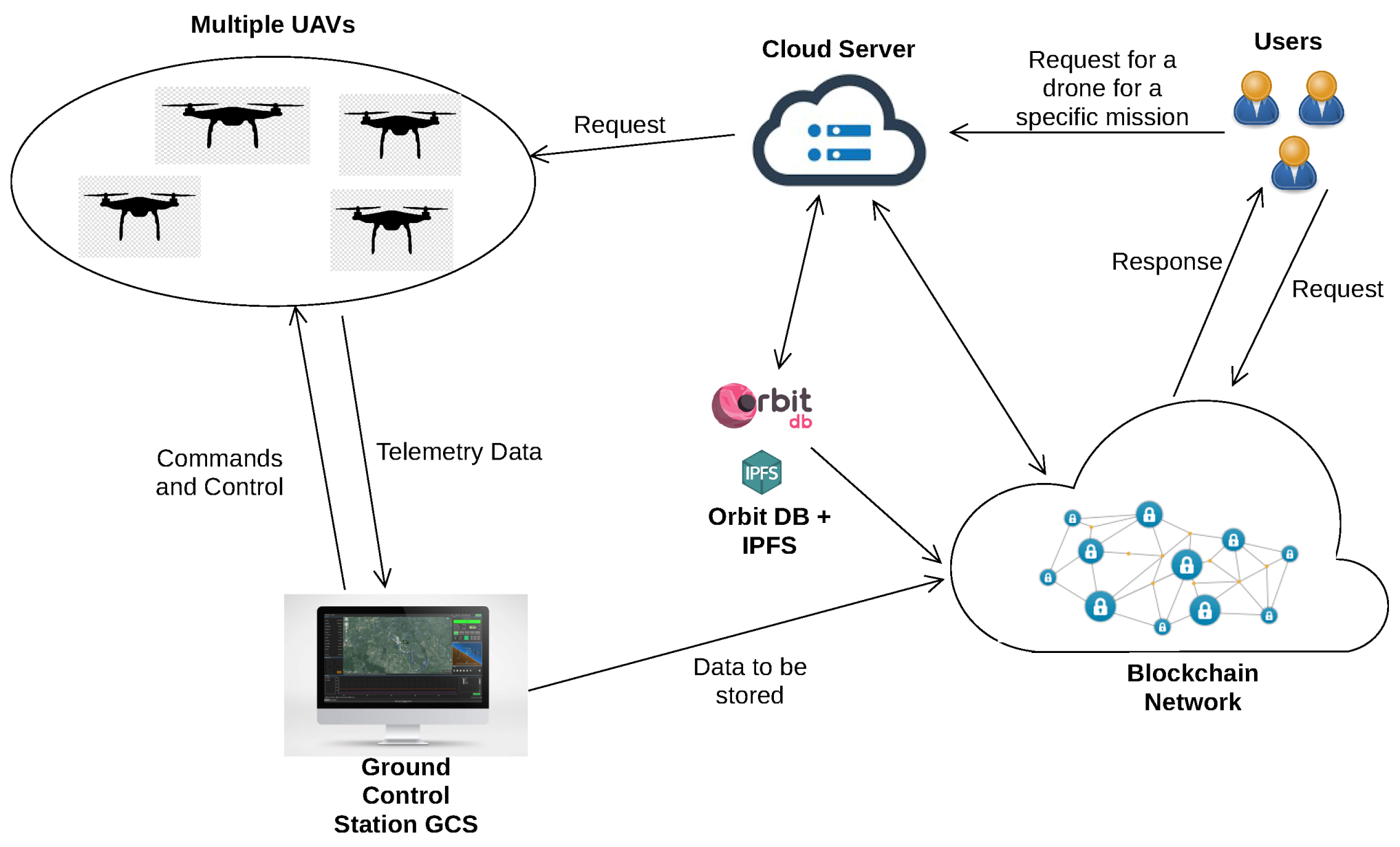
4.2. The Proposed UTM-Chain Architecture Description
- Multiple Unmanned Aerial Vehicles (drones): UAVs are pilotless aircraft that can operate autonomously via the on-board computer or can be remotely controlled by a pilot at the Ground Control Station (GCS). UAVs use sensors to collect different types of data such as UAVs’ speed, battery level, altitude, RGB images, thermal images. Depending on the system requirements, specific sensors can be applied. The collected data can be preprocessed or kept intact at the UAV before being sent to GCS.
- Ground Control station: GCS is responsible for receiving data from UAVs and sending out commands to control UAVs including uploading new mission commands and updating controlling parameters.
- Users: are third-parties that have access to the parameters and data of the UAVs and GCS for useful purposes.
- Blockchain Network: The main role of the blockchain network is to maintain a distributed immutable database of actions performed by users, data collected from drones, and commands from GCS. The recorded transactions are shared between nodes in the network. In our architecture, the users, UAVs, and GCSs act as nodes, storing the whole blockchain and participating in the consensus protocol to verify blocks.
- Cloud server: is responsible for offloading computation from the drone to overcome the computing resources’ limitations of the UAVs and optimize the mission execution. Correspondingly, the flying time of the drones can be extended.
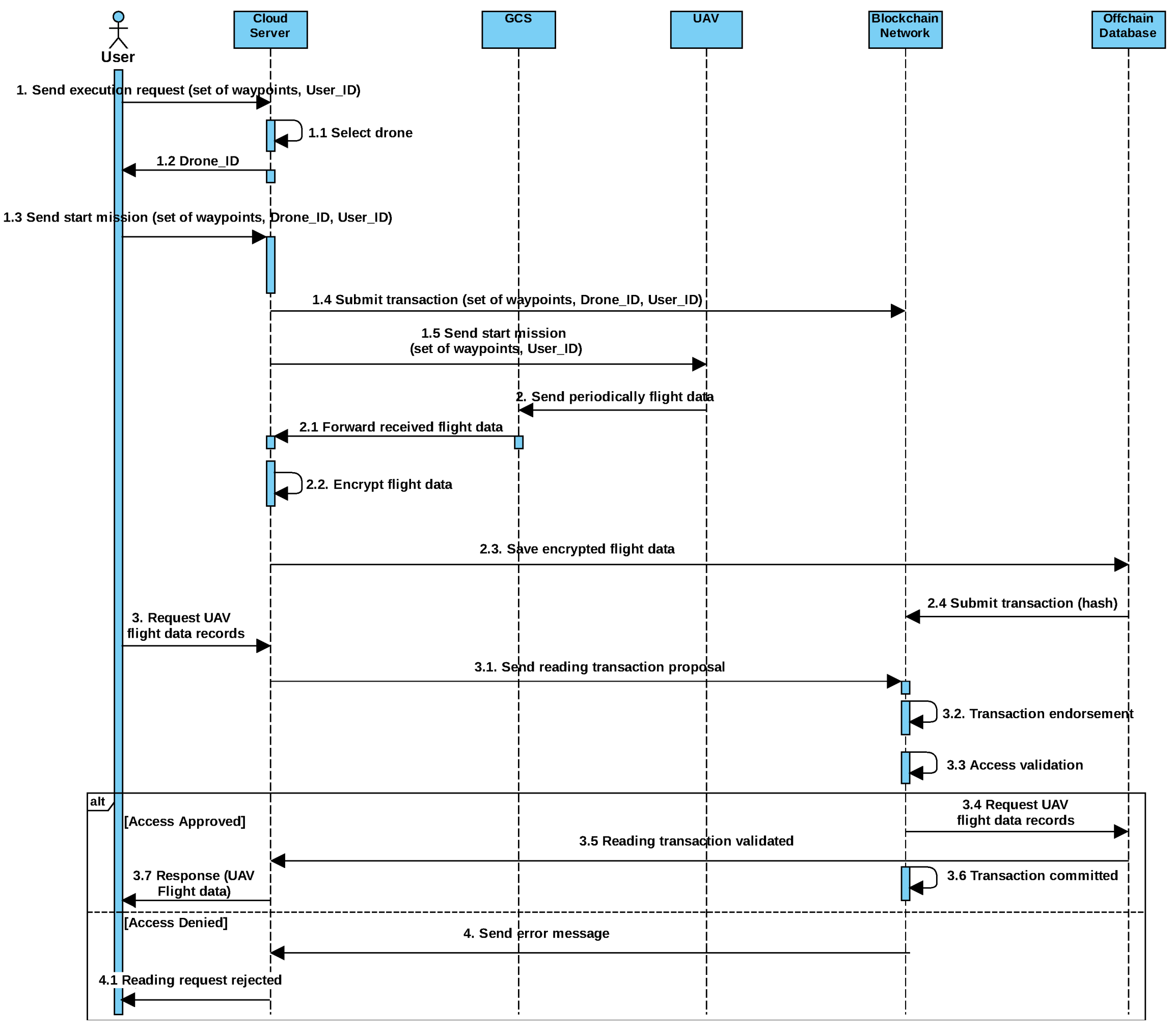
4.3. Interaction Model
5. UTM-Chain Implementation
5.1. Development Environment
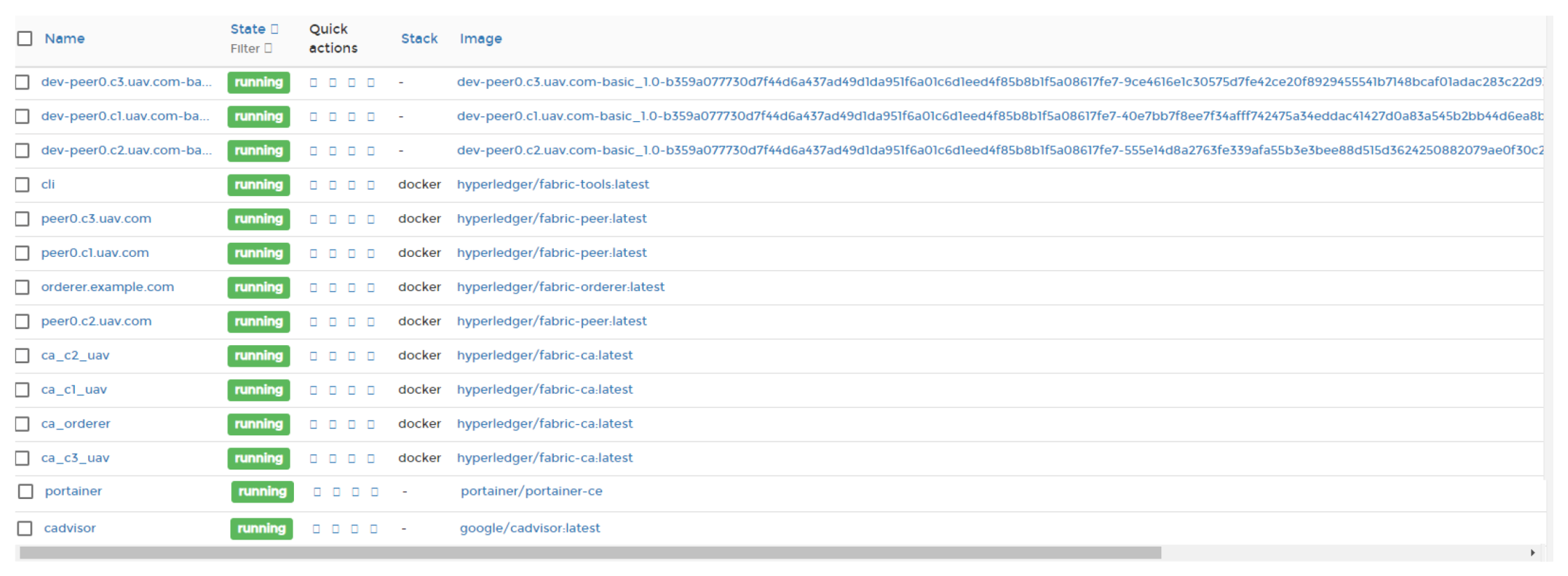
5.2. Blockchain System Setup
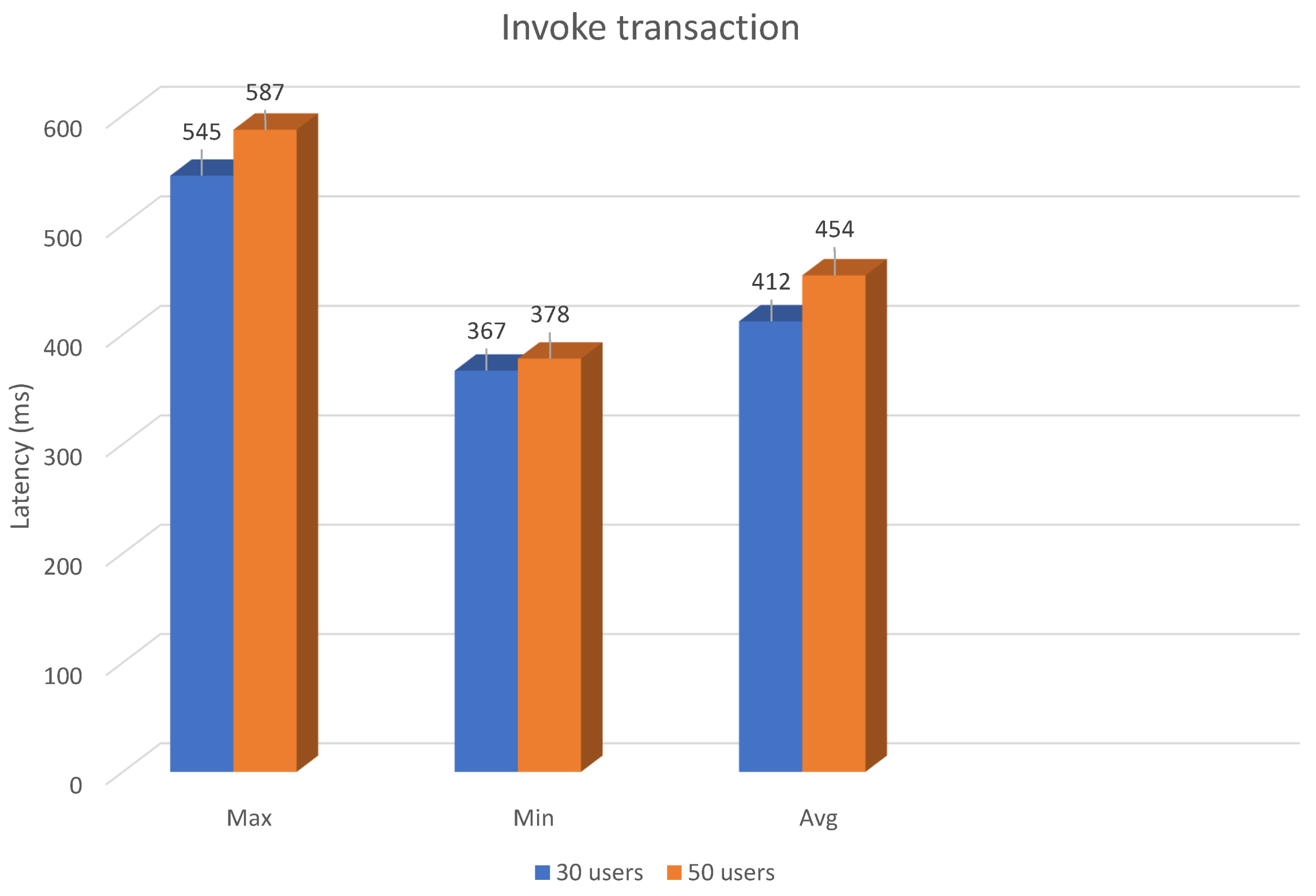
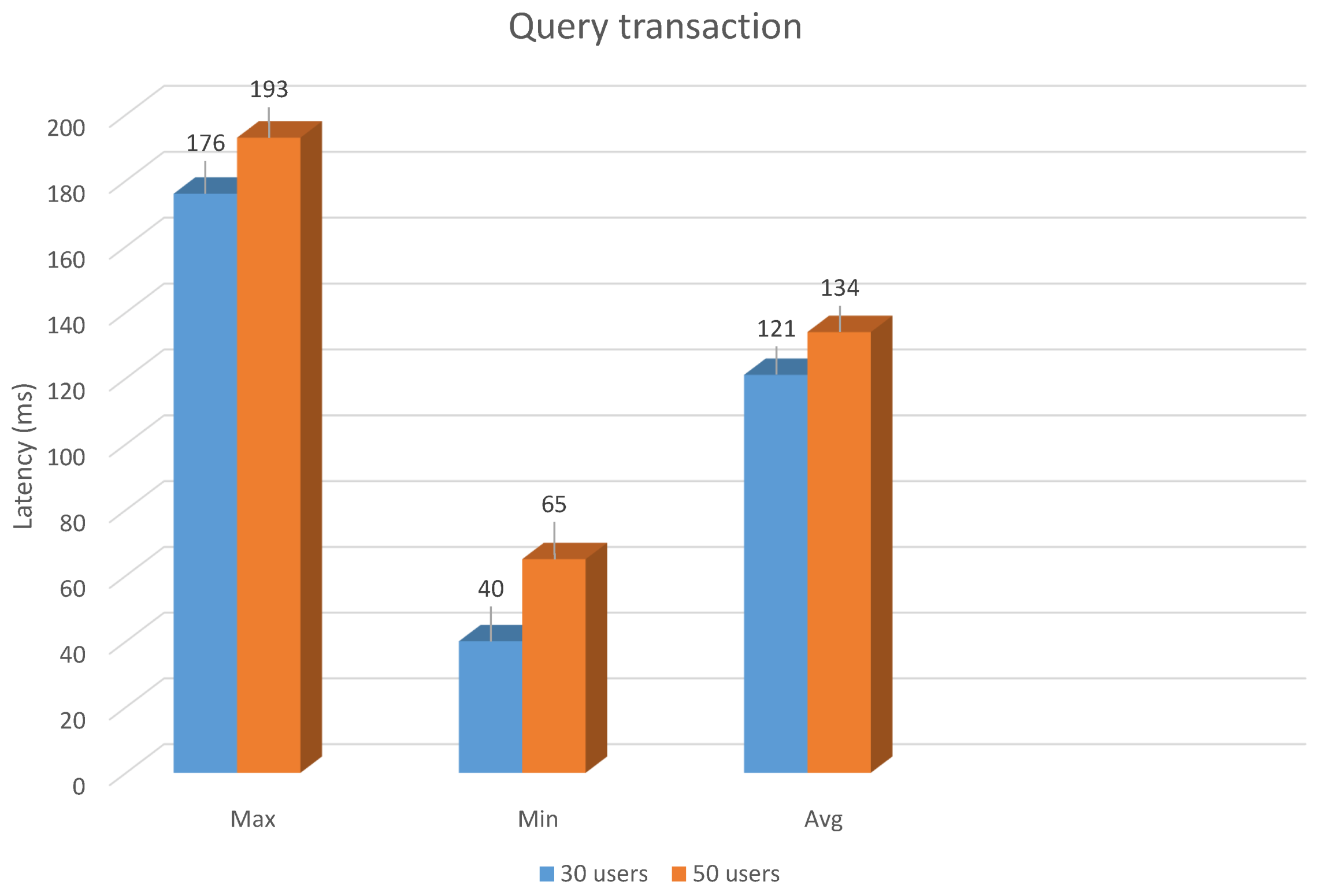
6. Performance Evaluation
7. Security Analysis
7.1. Protection against Availability Attacks
7.2. Protecting Flight Data Integrity
7.3. Mitigating Data Privacy Attacks
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cheikhrouhou, O.; Khoufi, I. A comprehensive survey on the Multiple Traveling Salesman Problem: Applications, approaches and taxonomy. Comput. Sci. Rev. 2021, 40, 100369. [Google Scholar] [CrossRef]
- Narkus-Kramer, M.P. Future demand and benefits for small unmanned aerial systems (UAS) package delivery. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017; p. 4103. [Google Scholar]
- Pajares, G. Overview and current status of remote sensing applications based on unmanned aerial vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–330. [Google Scholar] [CrossRef] [Green Version]
- Restas, A. Drone applications for supporting disaster management. World J. Eng. Technol. 2015, 3, 316–321. [Google Scholar] [CrossRef] [Green Version]
- Cheikhrouhou, O.; Koubâa, A.; Zarrad, A. A Cloud Based Disaster Management System. J. Sens. Actuator Netw. 2020, 9, 6. [Google Scholar] [CrossRef] [Green Version]
- Alotaibi, E.T.; Alqefari, S.S.; Koubaa, A. LSAR: Multi-UAV Collaboration for Search and Rescue Missions. IEEE Access 2019, 7, 55817–55832. [Google Scholar] [CrossRef]
- Chen, X.; Li, Z.; Yang, Y.; Qi, L.; Ke, R. High-resolution vehicle trajectory extraction and denoising from aerial videos. IEEE Trans. Intell. Transp. Syst. 2020. [Google Scholar] [CrossRef]
- Ke, R.; Li, Z.; Kim, S.; Ash, J.; Cui, Z.; Wang, Y. Real-time bidirectional traffic flow parameter estimation from aerial videos. IEEE Trans. Intell. Transp. Syst. 2016, 18, 890–901. [Google Scholar] [CrossRef]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on Unmanned Aerial Vehicle Networks for Civil Applications: A Communications Viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Cugurullo, F. Urban artificial intelligence: From automation to autonomy in the smart city. Front. Sustain. Cities 2020, 2, 1–14. [Google Scholar]
- Macrorie, R.; Marvin, S.; While, A. Robotics and automation in the city: A research agenda. Urban Geogr. 2020, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Firefighter Drones—How Drones Are Being Used for Helping Fire Departments. Available online: https://dronenodes.com/firefighter-drones/ (accessed on 1 April 2021).
- Efficient and Intelligent Solutions. Available online: https://ag.dji.com/ (accessed on 1 April 2021).
- Wind Turbine Inspection Drones. Available online: https://www.dslrpros.com/wind-turbine.html (accessed on 1 April 2021).
- Drone Solution for Powerline Inspection. Available online: https://www.aerialtronics.com/en/applications/drones-for-powerline-inspection#intro (accessed on 1 April 2021).
- FAA-NASA. Unmanned Aircraft System (UAS) Traffic Management (UTM). Available online: https://www.faa.gov/uas/research_development/traffic_management/media/UTM_ConOps_v2.pdf (accessed on 2 March 2020).
- Johnson, R.D.; Kopardekar, P.H.; Rios, J.L. FAA/NASA UAS Traffic Management Pilot Program (UPP). 2018. Available online: https://www.faa.gov/uas/research_development/traffic_management/utm_pilot_program/ (accessed on 23 April 2021).
- Gharibi, M.; Boutaba, R.; Waslander, S.L. Internet of Drones. IEEE Access 2016, 4, 1148–1162. [Google Scholar] [CrossRef]
- Koubâa, A.; Qureshi, B.; Sriti, M.F.; Allouch, A.; Javed, Y.; Alajlan, M.; Cheikhrouhou, O.; Khalgui, M.; Tovar, E. Dronemap planner: A service-oriented cloud-based management system for the internet-of-drones. Ad Hoc Netw. 2018, 86, 46–62. [Google Scholar] [CrossRef]
- Koubâa, A.; Qureshi, B.; Sriti, M.; Javed, Y.; Tovar, E. A service-oriented Cloud-based management system for the Internet-of-Drones. In Proceedings of the 2017 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Coimbra, Portugal, 26–28 April 2017; pp. 329–335. [Google Scholar] [CrossRef] [Green Version]
- APIs for Real-Time Access and Control to Drone Navigation, Telemetry and Payload. Available online: https://flytbase.com/developers/ (accessed on 15 October 2019).
- Bor-Yaliniz, I.; Salem, M.; Senerath, G.; Yanikomeroglu, H. Is 5G Ready for Drones: A Look into Contemporary and Prospective Wireless Networks from a Standardization Perspective. IEEE Wirel. Commun. 2019, 26, 18–27. [Google Scholar] [CrossRef]
- Cheikhrouhou, O.; Koubâa, A. BlockLoc: Secure Localization in the Internet of Things using Blockchain. In Proceedings of the 2019 15th InternationalWireless Communications & Mobile Computing Conference (IWCMC), Tangier, Morocco, 24–28 June 2019; pp. 629–634. [Google Scholar]
- Koubaa, A.; Qureshi, B. DroneTrack: Cloud-Based Real-Time Object Tracking Using Unmanned Aerial Vehicles Over the Internet. IEEE Access 2018, 6, 13810–13824. [Google Scholar] [CrossRef]
- Jiang, T.; Geller, J.; Ni, D.; Collura, J. Unmanned Aircraft System traffic management: Concept of operation and system architecture. Int. J. Transp. Sci. Technol. 2016, 5, 123–135. [Google Scholar] [CrossRef]
- Thompson, J. 3 Areas Where Blockchain will Propel the Drone Industry Forward. 2019. Available online: https://readwrite.com/2019/05/17/3-areas-where-blockchain-will-propel-the-drone-industry-forward/ (accessed on 22 October 2019).
- Kitchin, R.; Dodge, M. The (in) security of smart cities: Vulnerabilities, risks, mitigation, and prevention. J. Urban Technol. 2019, 26, 47–65. [Google Scholar] [CrossRef] [Green Version]
- Yigitcanlar, T.; Cugurullo, F. The sustainability of artificial intelligence: An urbanistic viewpoint from the lens of smart and sustainable cities. Sustainability 2020, 12, 8548. [Google Scholar] [CrossRef]
- Allouch, A.; Cheikhrouhou, O.; Koubâa, A.; Khalgui, M.; Abbes, T. MAVSec: Securing the MAVLink protocol for ardupilot/PX4 unmanned aerial systems. In Proceedings of the 2019 15th International Wireless Communications & Mobile Computing Conference (IWCMC), Tangier, Morocco, 24–28 June 2019; pp. 621–628. [Google Scholar]
- Jerbi, W.; Guermazi, A.; Cheikhrouhou, O.; Trabelsi, H. CoopECC: A Collaborative Cryptographic Mechanism for the Internet of Things. J. Sensors 2021, 2021, 8878513. [Google Scholar] [CrossRef]
- Nakamoto, S. Bitcoin: A Peer-to-Peer Electronic Cash System. 2008. Available online: https://bitcoin.org/bitcoin.pdf. (accessed on 13 March 2020).
- Ali, M.; Nelson, J.C.; Shea, R.; Freedman, M.J. Blockstack: A Global Naming and Storage System Secured by Blockchains. In Proceedings of the USENIX Annual Technical Conference, Denver, CO, USA, 22–24 June 2016; pp. 181–194. [Google Scholar]
- Hyperledger Fabric. A Blockchain Platform for the Enterprise. Available online: https://hyperledger-fabric.readthedocs.io/en/release-2.2/ (accessed on 25 June 2020).
- Zhang, G.; Wu, Q.; Cui, M.; Zhang, R. Securing UAV communications via joint trajectory and power control. IEEE Trans. Wirel. Commun. 2019, 18, 1376–1389. [Google Scholar] [CrossRef] [Green Version]
- Cui, M.; Zhang, G.; Wu, Q.; Ng, D.W.K. Robust trajectory and transmit power design for secure UAV communications. IEEE Trans. Veh. Technol. 2018, 67, 9042–9046. [Google Scholar] [CrossRef] [Green Version]
- Yoon, K.; Park, D.; Yim, Y.; Kim, K.; Yang, S.K.; Robinson, M. Security authentication system using encrypted channel on UAV network. In Proceedings of the 2017 First IEEE International Conference on Robotic Computing (IRC), Taichung, Taiwan, 10–12 April 2017; pp. 393–398. [Google Scholar]
- Choudhary, G.; Sharma, V.; You, I. Sustainable and secure trajectories for the military Internet of Drones (IoD) through an efficient Medium Access Control (MAC) protocol. Comput. Electr. Eng. 2019, 74, 59–73. [Google Scholar] [CrossRef]
- Han, M. Authentication and Encryption of Aerial Robotics Communication. 2017. Available online: https://scholarworks.sjsu.edu/etd_theses/4876/ (accessed on 13 March 2020). [CrossRef]
- Lin, C.; He, D.; Kumar, N.; Choo, K.K.R.; Vinel, A.; Huang, X. Security and privacy for the internet of drones: Challenges and solutions. IEEE Commun. Mag. 2018, 56, 64–69. [Google Scholar] [CrossRef]
- Ferrer, E.C. The blockchain: A new framework for robotic swarm systems. In Proceedings of the Future Technologies Conference; Springer: Cham, Switzerland, 2018; pp. 1037–1058. [Google Scholar]
- Kapitonov, A.; Lonshakov, S.; Krupenkin, A.; Berman, I. Blockchain-based protocol of autonomous business activity for multi-agent systems consisting of UAVs. In Proceedings of the 2017 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Linköping, Sweden, 3–5 October 2017; pp. 84–89. [Google Scholar] [CrossRef]
- Sharma, V.; You, I.; Kul, G. Socializing Drones for Inter-Service Operability in Ultra-Dense Wireless Networks using Blockchain. In Proceedings of the 2017 International Workshop on Managing Insider Security Threats; ACM: New York, NY, USA, 2017; pp. 81–84. [Google Scholar]
- Liang, X.; Zhao, J.; Shetty, S.; Li, D. Towards data assurance and resilience in iot using blockchain. In Proceedings of the MILCOM 2017—2017 IEEE Military Communications Conference (MILCOM), Baltimore, MD, USA, 23–25 October 2017; pp. 261–266. [Google Scholar]
- Aggarwal, S.; Shojafar, M.; Kumar, N.; Conti, M. A New Secure Data Dissemination Model in Internet of Drones. In Proceedings of the 53rd IEEE International Conference on Communications, (ICC 2019), Shanghai, China, 20–24 May 2019. [Google Scholar]
- García-Magarińo, I.; Lacuesta, R.; Rajarajan, M.; Lloret, J. Security in networks of unmanned aerial vehicles for surveillance with an agent-based approach inspired by the principles of blockchain. Ad Hoc Netw. 2019, 86, 72–82. [Google Scholar] [CrossRef]
- Chaari, R.; Cheikhrouhou, O.; Koubâa, A.; Youssef, H.; Hmam, H. Towards a distributed computation offloading architecture for cloud robotics. In Proceedings of the 2019 15th InternationalWireless Communications & Mobile Computing Conference (IWCMC), Tangier, Morocco, 24–28 June 2019; pp. 434–441. [Google Scholar]
- Jemal, I.; Cheikhrouhou, O.; Hamam, H.; Mahfoudhi, A. Sql injection attack detection and prevention techniques using machine learning. Int. J. Appl. Eng. Res. 2020, 15, 569–580. [Google Scholar]
- Ben Fredj, O.; Mihoub, A.; Krichen, M.; Cheikhrouhou, O.; Derhab, A. CyberSecurity Attack Prediction: A Deep Learning Approach. In Proceedings of the 13th International Conference on Security of Information and Networks; ACM: New York, NY, USA, 2020; pp. 1–6. [Google Scholar]
- Jemal, I.; Haddar, M.A.; Cheikhrouhou, O.; Mahfoudhi, A. Malicious Http Request Detection Using Code-Level Convolutional Neural Network. In Proceedings of the Risks and Security of Internet and Systems: 15th International Conference, CRiSIS 2020, Paris, France, 4–6 November 2020; Revised Selected Papers 15. Springer International Publishing: Cham, Switzerland, 2021; pp. 317–324. [Google Scholar]
- Fredj, O.B.; Cheikhrouhou, O.; Krichen, M.; Hamam, H.; Derhab, A. An OWASP Top Ten Driven Survey on Web Application Protection Methods. In Risks and Security of Internet and Systems; Garcia-Alfaro, J., Leneutre, J., Cuppens, N., Yaich, R., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 235–252. [Google Scholar]
- Jemal, I.; Haddar, M.A.; Cheikhrouhou, O.; Mahfoudhi, A. ASCII Embedding: An Efficient Deep Learning Method for Web Attacks Detection. Pattern Recognit. Artif. Intell. 2021, 1322, 286. [Google Scholar]
- Jemal, I.; Haddar, M.A.; Cheikhrouhou, O.; Mahfoudhi, A. M-CNN: A New Hybrid Deep Learning Model for Web Security. In Proceedings of the 2020 IEEE/ACS 17th International Conference on Computer Systems and Applications (AICCSA), Antalya, Turkey, 2–5 November 2020; pp. 1–7. [Google Scholar]
- Jamil, F.; Cheikhrouhou, O.; Jamil, H.; Koubaa, A.; Derhab, A.; Ferrag, M.A. PetroBlock: A Blockchain-Based Payment Mechanism for Fueling Smart Vehicles. Appl. Sci. 2021, 11, 3055. [Google Scholar] [CrossRef]
- Shetty, S.; Liang, X.; Bowden, D.; Zhao, J.; Zhang, L. Blockchain-Based Decentralized Accountability and Self-Sovereignty in Healthcare Systems. In Business Transformation through Blockchain; Springer: Cham, Switzerland, 2019; pp. 119–149. [Google Scholar]
- Androulaki, E.; Barger, A.; Bortnikov, V.; Cachin, C.; Christidis, K.; De Caro, A.; Enyeart, D.; Ferris, C.; Laventman, G.; Manevich, Y. Hyperledger fabric: A distributed operating system for permissioned blockchains. In Proceedings of the Thirteenth EuroSys Conference, Porto, Portugal, 23–26 April 2018; pp. 1–15. [Google Scholar]
- Nasir, Q.; Qasse, I.A.; Abu Talib, M.; Nassif, A.B. Performance analysis of hyperledger fabric platforms. Secur. Commun. Netw. 2018, 2018, 3976093. [Google Scholar] [CrossRef] [Green Version]
- bnc-hlf. Blockchain Network Composer for Hyperledger Fabric. Available online: https://github.com/bxforce/bnc-hlf (accessed on 11 February 2021).
- ArduPilot Dev Team. SITL Simulator (Software in the Loop). Available online: http://ardupilot.org/dev/docs/sitl-simulator-software-in-the-loop.html (accessed on 13 July 2018).
- Meier, L.; Camacho, J.; Godbolt, B.; Goppert, J.; Heng, L.; Lizarraga, M.; Meier, L.; Rudin, K.; Tanskanen, P.; Tridgell, A. QGroundControl: Ground Control Station for Small Air-Land-Water Autonomous Unmanned Systems 2010. Available online: http://qgroundcontrol.com (accessed on 13 March 2020).
- Fabric MSP. Available online: https://hyperledger-fabric.readthedocs.io/en/release-2.0/membership/membership.html (accessed on 25 June 2020).
- Fabric, C.A. Available online: https://hyperledger-fabric.readthedocs.io/en/release-2.0/identity/identity.html (accessed on 25 June 2020).
- Channels. Available online: https://hyperledger-fabric.readthedocs.io/en/master/channels.html (accessed on 25 June 2020).
- Peers. Available online: https://hyperledger-fabric.readthedocs.io/en/latest/peers/peers.html (accessed on 25 June 2020).
- gRPC. Available online: https://en.wikipedia.org/wiki/GRPC (accessed on 25 June 2020).
- WebSocket. Available online: https://stackoverflow.com/questions/38338674/websocket-communication-between-clients-in-distributed-system (accessed on 25 June 2020).
- Steichen, M.; Fiz, B.; Norvill, R.; Shbair, W.; State, R. Blockchain-based, decentralized access control for IPFS. In Proceedings of the 2018 IEEE International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Halifax, NS, Canada, 30 July–3 August 2018; pp. 1499–1506. [Google Scholar]
- Google cAdvisor. Available online: https://github.com/google/cadvisor (accessed on 17 June 2020).





| Target Components | Considered Threats and Attacks | Categories | Affected Security Parameter | |||||
|---|---|---|---|---|---|---|---|---|
| Physical Attack | Cyber Attack | C | I | A | Auth | Privacy | ||
| UAV and its sensors | Dynamic obstacles Civic challenges Weather conditions Interference Battery depletion Physical access to the drone | ✓ | ✓ | |||||
| GPS spoofing | ✓ | ✓ | ✓ | ✓ | ||||
| GPS jamming | ✓ | ✓ | ||||||
| Hacking | ✓ | ✓ | ||||||
| GCS | Software-related threats Virus, malware trojan, keylogger | ✓ | ✓ | ✓ | ✓ | ✓ | ||
| Communication Link | Denial of Service (DoS/ DDoS) | ✓ | ✓ | |||||
| Traffic analysis | ✓ | ✓ | ✓ | |||||
| Jamming | ✓ | ✓ | ||||||
| GCS Control Signals spoofing | ✓ | ✓ | ✓ | ✓ | ||||
| Man in the middle | ✓ | ✓ | ✓ | |||||
| Eavesdropping | ✓ | ✓ | ✓ | ✓ | ||||
| Hijacking | ✓ | ✓ | ✓ | |||||
| Identity spoofing | ✓ | ✓ | ✓ | |||||
| False location update | ✓ | ✓ | ||||||
| Cyber systems (cloud and internet) | SQL injection | ✓ | ✓ | ✓ | ✓ | |||
| NoSQL injection | ✓ | ✓ | ✓ | ✓ | ||||
| Insecure APIs | ✓ | ✓ | ✓ | ✓ | ||||
| Malware Injection | ✓ | ✓ | ✓ | ✓ | ||||
| Tools | Description |
|---|---|
| Hyperledger Fabric | v1.2 |
| Docker Engine | 19.03.13 |
| Docker Composer | 1.27.4 |
| CLI | bnc-hlf |
| Operating System | Ubuntu Linux 14.04 TLS |
| Simulator | SITL and QGroundControl |
| Type | Name | CPU (Max) | CPU (Avg) | Memory (Max) | Memory (Avg) |
|---|---|---|---|---|---|
| Docker | Peer0.c1.uav2.com | 10.54% | 7.32% | 95.5 MB | 81.4 MB |
| Docker | Peer0.c1.uav2.com | 11.34% | 5.76% | 87.6 MB | 77.3 MB |
| Docker | Peer0.c1.uav2.com | 9.52% | 6.34% | 91.5 MB | 65.8 MB |
| Docker | Peer0.c1.uav2.com_chaincode | 9.23% | 4.90% | 57.3 MB | 42.6 MB |
| Docker | Peer0.c1.uav2.com_chaincode | 8.22% | 3.23% | 54.2 MB | 41.5 MB |
| Docker | Peer0.c1.uav2.com_ chaincode | 8.56% | 5.22% | 50.1 MB | 42.2 MB |
| Docker | Orderer.example.com | 15.32% | 7.53% | 92.7 MB | 75.2 MB |
| Docker | ca_orderer | 6.42% | 0% | 90.5 MB | 0 MB |
| Docker | Ca_c1_uav | 5.92% | 0% | 93.2 MB | 0 MB |
| Docker | Ca_c2_uav | 7.64% | 0% | 91.6 MB | 0 MB |
| Docker | Ca_c3_uav | 8.52% | 0% | 89.5 MB | 0 MB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Allouch, A.; Cheikhrouhou, O.; Koubâa, A.; Toumi, K.; Khalgui, M.; Nguyen Gia, T. UTM-Chain: Blockchain-Based Secure Unmanned Traffic Management for Internet of Drones. Sensors 2021, 21, 3049. https://doi.org/10.3390/s21093049
Allouch A, Cheikhrouhou O, Koubâa A, Toumi K, Khalgui M, Nguyen Gia T. UTM-Chain: Blockchain-Based Secure Unmanned Traffic Management for Internet of Drones. Sensors. 2021; 21(9):3049. https://doi.org/10.3390/s21093049
Chicago/Turabian StyleAllouch, Azza, Omar Cheikhrouhou, Anis Koubâa, Khalifa Toumi, Mohamed Khalgui, and Tuan Nguyen Gia. 2021. "UTM-Chain: Blockchain-Based Secure Unmanned Traffic Management for Internet of Drones" Sensors 21, no. 9: 3049. https://doi.org/10.3390/s21093049
APA StyleAllouch, A., Cheikhrouhou, O., Koubâa, A., Toumi, K., Khalgui, M., & Nguyen Gia, T. (2021). UTM-Chain: Blockchain-Based Secure Unmanned Traffic Management for Internet of Drones. Sensors, 21(9), 3049. https://doi.org/10.3390/s21093049