Disturbance Modelling for Minimum Variance Control in Adaptive Optics Systems Using Wavefront Sensor Sampled-Data


Abstract
:1. Introduction
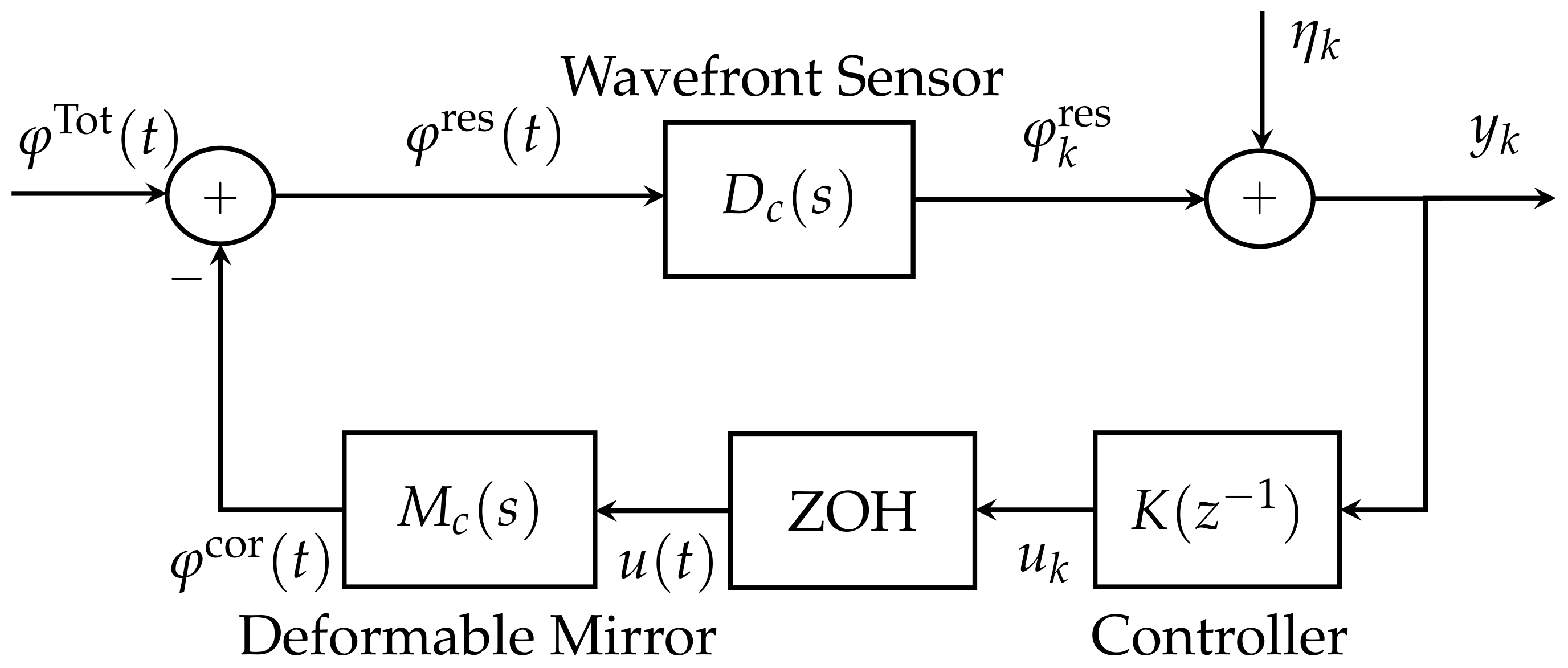
2. AO Systems
2.1. Wavefront Sensor
2.2. Deformable Mirror
2.3. AO Controller
3. Disturbance Model in AO Systems
3.1. Equivalent AO System Model
3.2. Classical Sampled-Data Model for Disturbances in AO Systems
4. Proposed Modelling for Disturbances
| Algorithm 1 Discrete-time PSD |
5. Identification of Disturbances
5.1. Nonlinear Least Square Fitting Method
5.2. Whittle’s Likelihood
| Algorithm 2 Identification algorithm |
|
6. MVC Performance in AO Systems
6.1. Minimum Variance Control Design
6.2. Performance of MVC Subject to Model Error
6.3. Control Performance under Model Mismatch
7. Numerical Example
7.1. Disturbance Identification
7.2. Performance of MVC in AO System
| Algorithm 3 MVC algorithm |
|
8. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Conan, J.M.; Raynaud, H.F.; Kulcsár, C.; Meimon, S. Are integral controllers adapted to the new era of ELT adaptive optics? In Proceedings of the AO for ELT 2011—2nd International Conference on Adaptive Optics for Extremely Large Telescopes, Victoria, BC, Canada, 25–30 September 2011; p. 57. [Google Scholar]
- Hayward, T.; Ripp, M.; Bonnet, H.; Cavedoni, C.; Galvez, R.; Gausachs, G.; Cho, M. Characterizing the Vibration Environments of the Gemini Telescopes. In Proceedings of the SPIE Astronomical Telescopes + Instrumentation, Ground-based and Airborne Telescopes VI, Edinburgh, UK, 26 June–1 July 2016; pp. 1956–1963. [Google Scholar]
- Tyson, R. Adaptive Optics Engineering Handbook, 1st ed.; Marcel Dekker Inc.: New York, NY, USA, 2000. [Google Scholar]
- Kulcsár, C.; Raynaud, H.; Conan, J.; Correia, C.; Petit, C. Control design and turbulent phase models in adaptive optics: A state-space interpretation. In Proceedings of the Adaptive Optics: Methods, Analysis and Applications, San José, CA, USA, 13–15 October 2009. AOWB1. [Google Scholar]
- Petit, C.; Conan, J.M.; Kulcsár, C.; Raynaud, H.; Fusco, T. First laboratory validation of vibration filtering with LQG control law for adaptive optics. Opt. Express 2008, 16, 87–97. [Google Scholar] [CrossRef]
- Sivo, G.; Kulcsár, C.; Conan, J.M.; Raynaud, H.; Éric, G.; Basden, A.; Vidal, F.; Morris, T.; Meimon, S.; Petit, C.; et al. First on-sky SCAO validation of full LQG control with vibration mitigation on the CANARY pathfinder. Opt. Express 2014, 22, 23565–23591. [Google Scholar] [CrossRef] [PubMed]
- Guesalaga, A.; Neichel, B.; Rigaut, F.; Osborn, J.; Guzman, D. Comparison of vibration mitigation controllers for adaptive optics systems. Appl. Opt. 2012, 51, 4520–4535. [Google Scholar] [CrossRef]
- Garcés, J.; Zúñiga, S.; Close, L.; Males, J.; Morzinski, K.; Escárate, P.; Castro, M.; Marchioni, J.; Rojas, D. Vibrations in MagAO: Resonance Sources Identification and First Approaches for Modeling and Control. In Proceedings of the SPIE Astronomical Telescopes + Instrumentation, Adaptive Optics Systems V, Edinburgh, UK, 26 June–1 July 2016; pp. 1079–1095. [Google Scholar]
- Zúñiga, S.; Garcés, J.; Close, L.; Males, J.; Morzinski, K.; Escárate, P.; Castro, M.; Marchioni, J.; Zagals, D.R. Vibrations in MagAO: Frequency-Based Analysis of on-Sky Data, Resonance Sources Identification, and Future Challenges in Vibrations Mitigation. In Proceedings of the SPIE Astronomical Telescopes + Instrumentation, Adaptive Optics Systems V, Edinburgh, UK, 26 June–1 July 2016; pp. 1123–1128. [Google Scholar]
- Escárate, P.; Christou, J.; Rahmer, G.; Miller, D.; Hill, J. Understanding the vibration environment for LBT/AO. In Proceedings of the AO4ELT5 Conference, Tenerife, Spain, 25–30 June 2017. [Google Scholar]
- Glück, M.; Pott, J.; Sawodny, O. Model predictive control of multi-Mirror adaptive optics systems. In Proceedings of the 2018 IEEE Conference on Control Technology and Applications (CCTA), Copenhagen, Denmark, 21–24 August 2018; pp. 909–914. [Google Scholar]
- Haber, A.; Verhaegen, M. Modeling and state-space identification of deformable mirrors. Opt. Express 2020, 28, 4726–4740. [Google Scholar] [CrossRef] [Green Version]
- Mocci, J.; Quintavalla, M.; Chiuso, A.; Bonora, S.; Muradore, R. PI-shaped LQG control design for adaptive optics systems. Control Eng. Pract. 2020, 102, 104528. [Google Scholar] [CrossRef]
- Sedghi, B.; Müller, M.; Jakob, G. E-elt vibration modeling, simulation, and budgeting. In Proceedings of the Integrated Modeling of Complex Optomechanical Systems II, Varenna, Italy, 7–9 October 2015; pp. 1–6. [Google Scholar]
- Sedghi, B.; Müller, M.; Dimmler, M. Analyzing the impact of vibrations on e-elt primary segmented mirror. In Proceedings of the SPIE Astronomical Telescopes + Instrumentation, Modeling, Systems Engineering, and Project Management for Astronomy VII, Edinburgh, UK, 26–28 June 2016. 991111. [Google Scholar]
- Escárate, P.; Coronel, M.; González, K.; Carvajal, R.; Agüero, J.C. Vibration model identification using the Maximum Likelihood method. In Proceedings of the SPIE Adaptive Optics Systems VI, Austin, TX, USA, 10–15 June 2018. [Google Scholar]
- González, K.; Coronel, M.; Carvajal, R.; Escárate, P.; Agüero, J.C. Maximum Likelihood identification of a continuous-time oscillator utilizing sampled data. IFAC-PapersOnLine 2018, 51, 712–717. [Google Scholar] [CrossRef]
- Coronel, M.; Escárate, P.; Christou, J.; Hill, J.; Rahmer, G.; Carvajal, R.; Agüero, J.C. Vibrations modelling at LBTO utilizing telemetry data. In Proceedings of the Adaptive Optics for Extremely Large Telescopes, Quebec City, QC, Canada, 9–14 June 2019. [Google Scholar]
- Soto-Muñoz, N.; Langedijk, C.; Escárate, P.; Carvajal, R.; Agüero, J.C. Identification and control of an experimental Adaptive Optics setup. In Proceedings of the 2019 IEEE CHILEAN Conference on Electrical, Electronics Engineering, Information and Communication Technologies (CHILECON), Valparaíso, Chile, 13–27 November 2019. [Google Scholar]
- Glück, M.; Pott, J.; Sawodny, O. Investigations of an accelerometer-based disturbance feedforward control for vibration suppression in adaptive optics of large telescopes. Astron. Soc. Pac. 2017, 129, 976. [Google Scholar] [CrossRef]
- Kubin, G.; Lainscsek, C.; Rank, E. Identification of nonlinear oscillator models for speech analysis and synthesis. In Nonlinear Speech Modeling and Applications: Advanced Lectures and Revised Selected Papers; Chollet, G., Esposito, A., Faundez-Zanuy, M., Marinaro, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 74–113. [Google Scholar]
- Kulcsár, C.; Raynaud, H.F.; Petit, C.; Conan, J.M.; de Lesegno, P.V. Optimal control, observers and integrators in adaptive optics. Opt. Express 2006, 14, 7464–7476. [Google Scholar] [CrossRef]
- Tyson, R. Principles of Adaptive Optics, 4th ed.; Series in Optics and Optoelectronics; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Kulcsár, C.; Raynaud, H.F.; Petit, C.; Conan, J.M. Minimum variance prediction and control for adaptive optics. Automatica 2012, 48, 1939–1954. [Google Scholar] [CrossRef]
- Conan, J.M.; Rousset, G.; Madec, P.Y. Wave-front temporal spectra in high-resolution imaging through turbulence. J. Opt. Soc. Am. A 1995, 12, 1559–1570. [Google Scholar] [CrossRef]
- Escárate, P.; Carvajal, R.; Close, L.; Males, J.; Morzinski, K.; Agüero, J.C. Minimum variance control for mitigation of vibrations in adaptive optics systems. Appl. Opt. 2017, 56, 5388–5397. [Google Scholar] [CrossRef] [PubMed]
- Sedghi, B.; Müller, M.; Bonnet, H.; Dimmler, M.; Bauvir, B. Field stabilization (tip/tilt control) of E-ELT. In Proceedings of the SPIE Astronomical Telescopes + Instrumentation, Ground-based and Airborne Telescopes III, San Diego, CA, USA, 27 June–2 July 2010; pp. 1402–1413. [Google Scholar]
- Rodriguez, I.; Neichel, B.; Guesalaga, A.; Rigaut, F.; Guzman, D. Kalman and H-infinity controllers for GeMS. In Proceedings of the Adaptive Optics: Methods, Analysis and Applications 2011, Toronto, ON, Canada, 10–14 July 2011; p. JWA32. [Google Scholar]
- Juvénal, R.; Kulcsár, C.; Raynaud, H.; Conan, J.M.; Petit, C.; Leboulleux, L.; Sivo, G.; Garrel, V. Tip-tilt modelling and control for GeMS: A performance comparison of identification techniques. In Proceedings of the Adaptive Optics for Extremely Large Telescopes 4, Lake Arrowhead, CA, USA, 26–30 October 2015. [Google Scholar]
- Raynaud, H.F.; Correia, C.; Kulcsár, C.; Conan, J.M. Minimum-variance control of astronomical adaptive optic systems with actuator dynamics under synchronous and asynchronous sampling. Int. J. Robust Nonlinear Control 2011, 21, 768–789. [Google Scholar] [CrossRef]
- Coronel, M.; Soto, N.; Carvajal, R.; Escárate, P.; Agüero, J.C. Identification and model predictive control of an experimental adaptive optics setup utilizing Kautz basis functions. In Proceedings of the SPIE Astronomical Telescopes + Instrumentation, Adaptive Optics Systems VII, Virtual Conference, 14–18 December 2020; pp. 487–498. [Google Scholar] [CrossRef]
- Kulcsár, C.; Massioni, P.; Sivo, G.; Raynaud, H. Vibration mitigation in adaptive optics control. In Proceedings of the SPIE Astronomical Telescopes + Instrumentation, Adaptive Optics Systems III, Amsterdam, The Netherlands, 1–6 July 2012; p. 84470Z. [Google Scholar]
- Fedrigo, E.; Muradore, R.; Zilio, D. High performance adaptive optics system with fine tip/tilt control. Control Eng. Pract. 2009, 17, 122–135. [Google Scholar] [CrossRef]
- Meimon, S.; Petit, C.; Fusco, T.; Kulcsar, C. Tip–tilt disturbance model identification for Kalman-based control scheme: Application to XAO and ELT systems. J. Opt. Soc. Am. A 2010, 27, A122–A132. [Google Scholar] [CrossRef]
- Yang, K.; Yang, P.; Chen, S.; Wang, S.; Wen, L.; Dong, L.; He, X.; Lai, B.; Yu, X.; Xu, B. Vibration identification based on Levenberg–Marquardt optimization for mitigation in adaptive optics systems. Appl. Opt. 2018, 57, 2820–2826. [Google Scholar] [CrossRef]
- Gavel, D.T.; Wiberg, D. Toward Strehl-optimizing adaptive optics controllers. In Proceedings of the Adaptive Optical System Technologies II, Waikoloa, HI, USA, 7 February 2003; Volume 4839, pp. 890–901. [Google Scholar]
- Piatrou, P.; Roggemann, M.C. Performance study of Kalman filter controller for multiconjugate adaptive optics. Appl. Opt. 2007, 46, 1446–1455. [Google Scholar] [CrossRef]
- Correia, C.; Jackson, K.; Véran, J.P.; Andersen, D.; Lardière, O.; Bradley, C. Static and predictive tomographic reconstruction for wide-field multi-object adaptive optics systems. J. Opt. Soc. Am. A 2014, 31, 101–113. [Google Scholar] [CrossRef] [PubMed]
- Correia, C.; Véran, J.P.; Herriot, G.; Ellerbroek, B.; Wang, L.; Gilles, L. Increased sky coverage with optimal correction of tilt and tilt-anisoplanatism modes in laser-guide-star multiconjugate adaptive optics. J. Opt. Soc. Am. A 2013, 30, 604–615. [Google Scholar] [CrossRef] [Green Version]
- Jackson, K.; Correia, C.; Lardière, O.; Andersen, D.; Bradley, C. Linear prediction of atmospheric wave-fronts for tomographic adaptive optics systems: Modelling and robustness assessment. Opt. Lett. 2015, 40, 143–146. [Google Scholar] [CrossRef] [Green Version]
- Goodwin, G.C.; Agüero, J.C.; Cea-Garrido, M.E.; Salgado, M.; Yuz, J. Sampling and sampled-data models: The interface between the continuous world and digital algorithms. IEEE Control Syst. Mag. 2013, 33, 34–53. [Google Scholar]
- Åström, K.; Wittenmark, B. Computer-Controlled Systems Theory and Design, 3rd ed.; Prentice Hall: Hoboken, NJ, USA, 1997. [Google Scholar]
- Bernstein, D. Matrix Mathematics: Theory, Facts, and Formulas, 2nd ed.; Princeton University Press: Woodstock, UK, 2009. [Google Scholar]
- Garnier, H.; Wang, L. Identification of Continuous-Time Models from Sampled Data; Springer: London, UK, 2008. [Google Scholar]
- Van Loan, C. Computing integrals involving the matrix exponential. IEEE Trans. Autom. Control 1978, 23, 395–404. [Google Scholar] [CrossRef] [Green Version]
- Söderström, T. Discrete-Time Stochastic Systems: Estimation and Control, 2nd ed.; Springer-Verlag New York, Inc.: Secaucus, NJ, USA, 2002. [Google Scholar]
- Anderson, B.; Moore, J. Optimal Filtering; Prentice-Hall Inc.: Englewood Cliffs, NJ, USA, 1979. [Google Scholar]
- Goodwin, G.C.; Graebe, S.; Salgado, M. Control System Design, 1st ed.; Prentice Hall PTR: Upper Saddle River, NJ, USA, 2000. [Google Scholar]
- Hannan, E. Time Series Analysis; John Wiley & Sons, Inc.: New York, NY, USA, 1960. [Google Scholar]
- Pawitan, Y. Whittle Likelihood. In Encyclopedia of Statistical Sciences, 2nd ed.; Kotz, S., Balakrishnan, N., Read, C., Vidakovic, B., Eds.; John Wiley & Sons, Inc.: Somerset, NJ, USA, 2004; Volume 15, pp. 9136–9138. [Google Scholar]
- Palma, W. Long-Memory Time Series Theory and Methods; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2007. [Google Scholar]
- Agüero, J.C.; Goodwin, G.C. Choosing Between Open- and Closed-Loop Experiments in Linear System Identification. IEEE Trans. Autom. Control 2007, 52, 1475–1480. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 2 | 14 | 20 | 29 | 43 | 60 | |
| 0.9 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 | |
| 1.439 | 3.493 | 3.734 | 4.253 | 5.540 | 9.711 |
| 0 | 0.5 | |
| 0 | 3.85 |
| (Hz) | |||
|---|---|---|---|
| 1 | |||
| 2 | |||
| 3 | |||
| 4 | |||
| 5 | |||
| 6 |
| (Hz) | |||
|---|---|---|---|
| 1 | |||
| 2 | |||
| 3 | |||
| 4 | |||
| 5 | |||
| 6 |
| Proposed Method | NLS [35] | |
| 0 | 0 | 0 |
| 1 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Coronel, M.; Carvajal, R.; Escárate, P.; Agüero, J.C. Disturbance Modelling for Minimum Variance Control in Adaptive Optics Systems Using Wavefront Sensor Sampled-Data. Sensors 2021, 21, 3054. https://doi.org/10.3390/s21093054
Coronel M, Carvajal R, Escárate P, Agüero JC. Disturbance Modelling for Minimum Variance Control in Adaptive Optics Systems Using Wavefront Sensor Sampled-Data. Sensors. 2021; 21(9):3054. https://doi.org/10.3390/s21093054
Chicago/Turabian StyleCoronel, María, Rodrigo Carvajal, Pedro Escárate, and Juan C. Agüero. 2021. "Disturbance Modelling for Minimum Variance Control in Adaptive Optics Systems Using Wavefront Sensor Sampled-Data" Sensors 21, no. 9: 3054. https://doi.org/10.3390/s21093054
APA StyleCoronel, M., Carvajal, R., Escárate, P., & Agüero, J. C. (2021). Disturbance Modelling for Minimum Variance Control in Adaptive Optics Systems Using Wavefront Sensor Sampled-Data. Sensors, 21(9), 3054. https://doi.org/10.3390/s21093054