
Device Free Detection in Impulse Radio Ultrawide Bandwidth Systems



Abstract
:1. Introduction
- In the context of using an UWB system as an indoor radar, the Neyman–Pearson (NP) criteria is applied. Detection probability and miss probability for a slow time hopping pulse position modulation (STH-PPM) system is developed.
- Characteristic function (CF) is utilized to measure the moments of the presence of the user. With the help of CF, higher orders of the moments can be calculated if required.
2. System Model
2.1. Transmitted Signal
2.2. Channel Model
2.3. Received Signal
3. Device Detection
4. Device Presence Modelling
4.1. Characteristic Function (CF)
4.2. Device Presence Moments
5. Performance Analysis
5.1. Probability of False Alarm
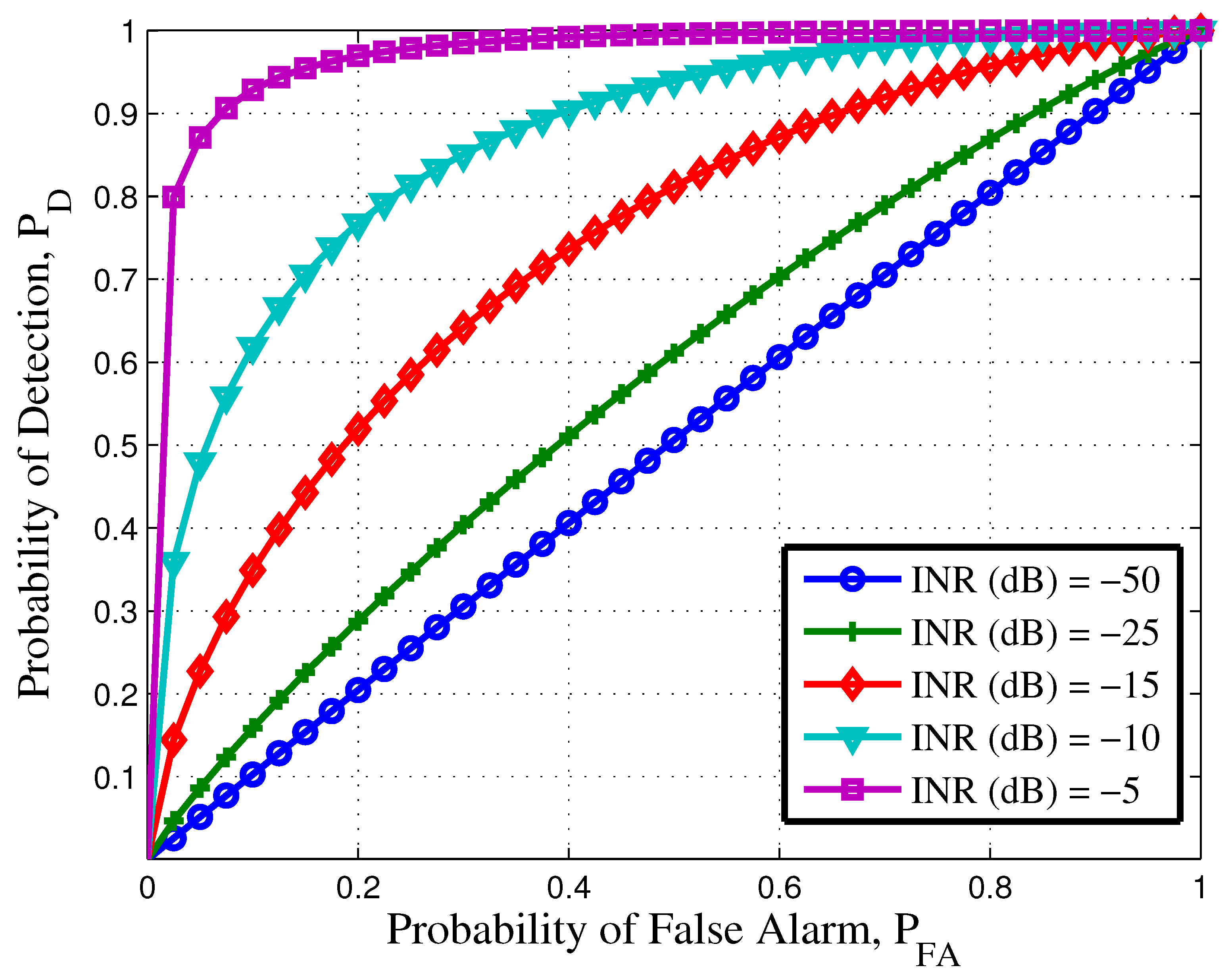
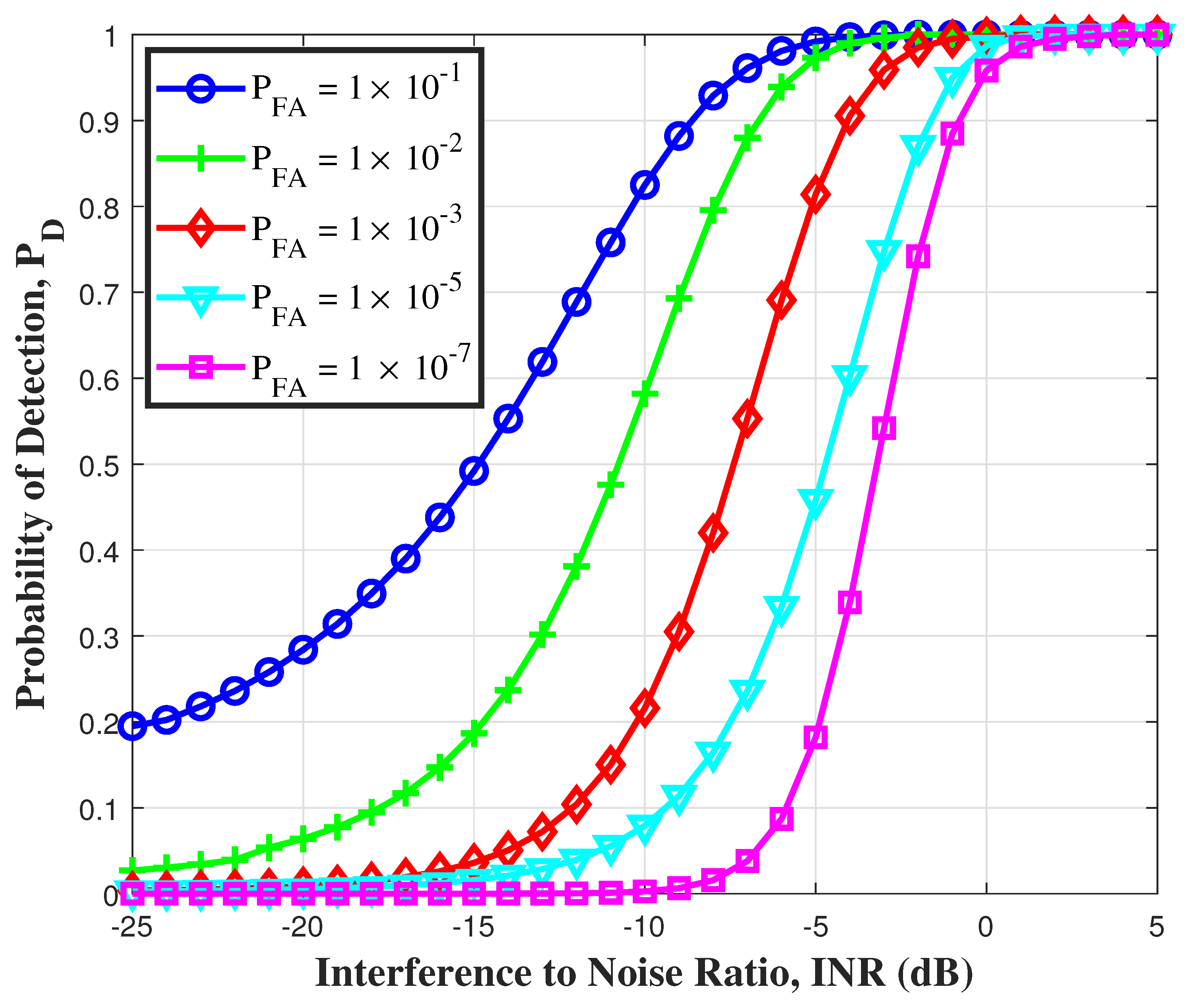
5.2. Probability of Detection
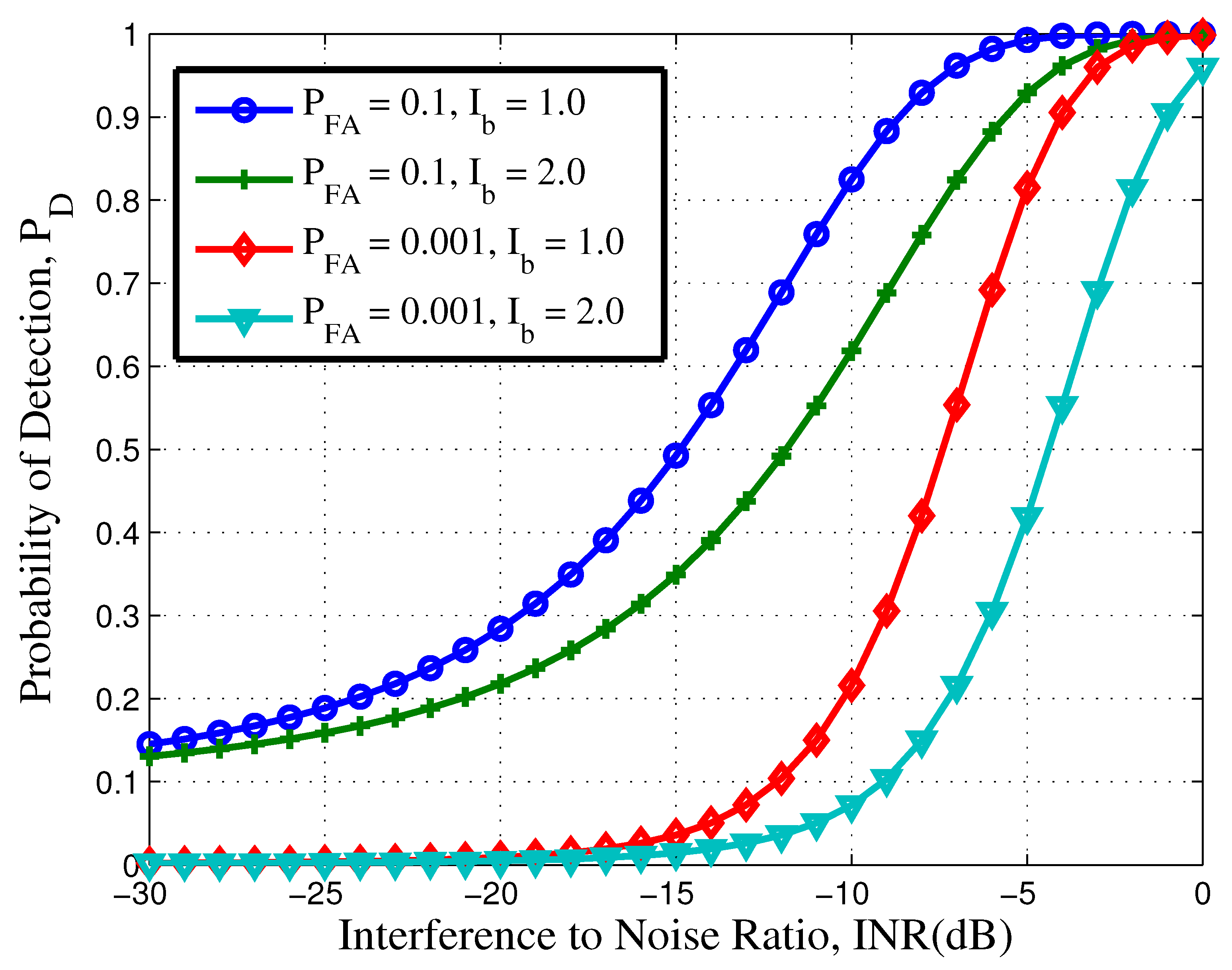
5.3. Optimized Threshold
6. Performance Analysis and Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AWGN | Added White Gaussian Noise |
| BER | Bit Error Rate |
| BLE | Bluetooth Low Energy |
| CF | Characteristic Function |
| COVID | Coronavirus Disease |
| CRLB | Cramer-Rao Lower Bounds |
| DS | Direct-Sequence |
| DS-TH | Direct-Sequence and Time-Hopping |
| False Alarm | FA |
| GPS | Global Positioning System |
| INR | Interference Noise Ratio |
| IR | Impulse Radio |
| LoRa | Long Range |
| LoS | Line of Sight |
| NLoS | Non Line of Sight |
| NP | Neyman Pearson |
| OOK | On-Off Keying |
| PAM | Pulse Amplitude Modulation |
| PPM | Pulse Position Modulation |
| PSM | Pulse Shape Modulation |
| RFID | Radio Frequency Identification |
| ROC | Receiver Operating Characteristics |
| STH | Slow Time Hopping |
| SV | Saleh Valenzuela |
| TDoA | Time Difference of ArrivalChannel State Information |
| ToA | Time of Arrival |
| UWB | Ultra-wide bandwidth |
| WiFi | Wireless Fidelity |
List of Symbols
| Transmitted Signal | |
| Received Signal | |
| AWGN Noise | |
| Time domain UWB pulse | |
| Number of pulses | |
| j | index of Frame |
| t | index of Time |
| k | index of Device |
| Channel Impulse Response | |
| V | Number of Clusters |
| U | Number of Rays in Clusters |
| Frame duration | |
| L | Total Number of multipath |
| Delay of the l-th multipath | |
| K | Number of devices |
| Channel impulse response of l multipath | |
| AWGN Noise Variance | |
| Threshold | |
| m-th moment | |
| Mean when Deviceis Absent | |
| Mean when Device is Present | |
| Variance when Device is Absent | |
| Variance when Device is Present | |
| Autocorrelation of the UWB pulse | |
| Dirac delta Function |
Appendix A
Appendix B
References
- Coronavirus Disease (COVID-19) Advice for the Public. Available online: https://www.who.int/emergencies/diseases/novel-coronavirus-2019/advice-for-public (accessed on 6 May 2021).
- Barabas, J.; Zalman, R.; Kochlan, M. Automated evaluation of COVID-19 risk factors coupled with real-time, indoor, personal localization data for potential disease identification, prevention and smart quarantining. In Proceedings of the 2020 43rd International Conference on Telecommunications and Signal Processing (TSP), Milan, Italy, 6–8 July 2020; pp. 645–648. [Google Scholar]
- World Health Organization Coronavirus Disease (COVID-2019) Situation Reports Website. April 2020. Available online: https://www.who.int/emergencies/diseases/novel-coronavirus-2019/situation-reports (accessed on 6 May 2021).
- Ndiaye, M.; Oyewobi, S.S.; Abu-Mahfouz, A.M.; Hancke, G.P.; Kurien, A.M.; Djouani, K. IoT in the Wake of COVID-19: A Survey on Contributions, Challenges and Evolution. IEEE Access 2020, 8, 186821–186839. [Google Scholar] [CrossRef]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent Advances in Indoor Localization: A Survey on Theoretical Approaches and Applications. IEEE Commun. Surv. Tutor. 2017, 19, 1327–1346. [Google Scholar] [CrossRef] [Green Version]
- Dakopoulos, D.; Bourbakis, N.G. Wearable Obstacle Avoidance Electronic Travel Aids for Blind: A Survey. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2010, 40, 25–35. [Google Scholar] [CrossRef]
- Patwari, N.; Wilson, J. RF Sensor Networks for Device-Free Localization: Measurements, Models, and Algorithms. Proc. IEEE 2010, 98, 1961–1973. [Google Scholar] [CrossRef] [Green Version]
- Harle, R. A Survey of Indoor Inertial Positioning Systems for Pedestrians. IEEE Commun. Surv. Tutor. 2013, 15, 1281–1293. [Google Scholar] [CrossRef]
- Pham, M.; Yang, D.; Sheng, W. A Sensor Fusion Approach to Indoor Human Localization Based on Environmental and Wearable Sensors. IEEE Trans. Autom. Sci. Eng. 2019, 16, 339–350. [Google Scholar] [CrossRef]
- Haque, F.; Dehghanian, V.; Fapojuwo, A.O.; Nielsen, J. A Sensor Fusion-Based Framework for Floor Localization. IEEE Sens. J. 2019, 19, 623–631. [Google Scholar] [CrossRef]
- Deak, G.; Curran, K.; Condell, J. A survey of active and passive indoor localization systems. Elsevier Comput. Commun. 2012, 35, 1939–1954. [Google Scholar] [CrossRef]
- Teixeira, T.; Dublon, G.; Savvides, A. A survey of human-sensing: Methods for detecting presence, count, location, track, and identity. ACM Comput. Surv. 2010, 5, 59–69. [Google Scholar]
- Montoliu, R.; Sansano, E.; Gascó, A.; Belmonte, O.; Caballer, A. Indoor Positioning for Monitoring Older Adults at Home: Wi-Fi and BLE Technologies in Real Scenarios. Electronics 2020, 9, 728. [Google Scholar] [CrossRef]
- Ruan, W. Unobtrusive human localization and activity recognition for supporting independent living of the elderly. In Proceedings of the 2016 IEEE International Conference on Pervasive Computing and Communication Workshops (PerCom Workshops), Sydney, NSW, Australia, 14–18 March 2016; pp. 1–3. [Google Scholar]
- Damodaran, N.; Haruni, E.; Kokhkharova, M.; Schäfer, J. Device free human activity and fall recognition using WiFi channel state information (CSI). CCF Trans. Pervasive Comp. Interact. 2020, 2, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Farooq, A.; Ahmed, Q.Z.; Alade, T. Indoor Two Way Ranging using mm-Wave for Future Wireless Networks. In Proceedings of the Emerging Tech (EMiT) Conference 2019, Huddersfield, UK, 9–11 April 2019; University of Huddersfield: Huddersfield, UK, 2019. [Google Scholar]
- Ahmed, Q.Z.; Hafeez, M.; Khan, F.A.; Lazaridis, P. Towards Beyond 5G Future Wireless Networks with focus towards Indoor Localization. In Proceedings of the 2020 IEEE Eighth International Conference on Communications and Networking (ComNet), Hammamet, Tunisia, 27–30 October 2020; pp. 1–5. [Google Scholar]
- Tang, L.; Zhang, Z.; Zhao, Y.; Feng, T.; Wong, W.; Garg, H.K. A Comparison of WiFi-based Indoor Positioning Methods. In Proceedings of the 2019 13th International Conference on Signal Processing and Communication Systems (ICSPCS), Gold Coast, QLD, Australia, 16–18 December 2019; pp. 1–6. [Google Scholar]
- Saab, S.S.; Nakad, Z.S. A Standalone RFID Indoor Positioning System Using Passive Tags. IEEE Trans. Ind. Electron. 2011, 58, 1961–1970. [Google Scholar] [CrossRef]
- Zhuang, Y.; Yang, J.; Li, Y.; Qi, L.; El-Sheimy, N. Smartphone-Based Indoor Localization with Bluetooth Low Energy Beacons. Sensors 2016, 16, 596. [Google Scholar] [CrossRef] [Green Version]
- Uradzinski, M.; Guo, H.; Liu, X.; Yu, M. Advanced Indoor Positioning Using Zigbee Wireless Technology. Wirel. Pers. Commun. 2017, 97, 6509–6518. [Google Scholar] [CrossRef]
- Ahangar, M.N.; Ahmed, Q.Z.; Khan, F.A.; Hafeez, M. A Survey of Autonomous Vehicles: Enabling Communication Technologies and Challenges. Sensors 2021, 21, 706. [Google Scholar] [CrossRef]
- Quan, X.; Choi, J.W.; Cho, S.H. A New Thresholding Method for IR-UWB Radar-Based Detection Applications. Sensors 2020, 20, 2314. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ahmed, Q.Z.; Yang, L.-L. Reduced-rank adaptive multiuser detection in hybrid direct-sequence time-hopping ultrawide bandwidth systems. IEEE Trans. Wirel. Commun. 2010, 9, 156–167. [Google Scholar] [CrossRef]
- Ahmed, Q.Z.; Yang, L.-L.; Chen, S. Reduced-rank adaptive least bit-error-rate detection in hybrid direct-sequence time-hopping ultrawide bandwidth systems. IEEE Trans. Veh. Technol. 2011, 60, 849–857. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, Q.Z.; Park, K.; Alouini, M. Ultrawide Bandwidth Receiver Based on a Multivariate Generalized Gaussian Distribution. IEEE Trans. Wirel. Commun. 2015, 14, 1800–1810. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed]
- Mireles, F.R. On the performance of ultra-wide-band signals in Gaussian noise and dense multipath. IEEE Trans. Veh. Technol. 2001, 50, 244–249. [Google Scholar] [CrossRef]
- Lee, J.; Scholtz, R.A. Ranging in a dense multipath environment using an UWB radio link. IEEE J. Sel. Areas Commun. 2002, 20, 1677–1683. [Google Scholar]
- Falsi, C.; Dardari, D.; Mucchi, L.; Win, M.Z. Time of arrival estimation for UWB localizers in realistic environments. EURASIP J. Appl. Signal Process. 2006, 2006, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Sangodoyin, S.; Niranjayan, S.; Molisch, A.F. A Measurement-Based Model for Outdoor Near-Ground Ultrawideband Channels. IEEE Trans. Antennas Propag. 2016, 64, 740–751. [Google Scholar] [CrossRef]
- Beaulieu, N.C.; Young, D.J. Designing time-hopping ultrawide bandwidth receivers for multiuser interference environments. Proc. IEEE 2009, 97, 255–283. [Google Scholar] [CrossRef]
- Scholtz, R.A. Multiple-access with time-hopping impulse modulation. In Proceedings of the Military Communications Conference (MILCOM’1993), Boston, MA, USA, 11–14 October 1993; Volume 2, pp. 447–450. [Google Scholar]
- Qiu, R.C.; Liu, H.; Shen, X. Ultra-wideband for multiple access communications. IEEE Commun. Mag. 2005, 43, 80–87. [Google Scholar] [CrossRef]
- Parr, B.; Cho, B.; Wallace, K.; Ding, Z. A Novel ultra-wideband pulse design algorithm. IEEE Commun. Lett. 2003, 7, 219–221. [Google Scholar] [CrossRef]
- Durisi, G.; Benedetto, S. Performance evaluation and comparison of different modulation schemes for UWB multiaccess systems. In Proceedings of the IEEE International Conference on Communications, (ICC), Anchorage, AK, USA, 11–15 May 2003; pp. 2187–2191. [Google Scholar]
- Sadler, B.M.; Swami, A. On the performance of UWB and DS-spread spectrum communication systems. In Proceedings of the IEEE Conference on Ultra Wideband Systems and Technologies, (UWBST), Baltimore, MD, USA, 21–23 May 2002; pp. 289–292. [Google Scholar]
- Ahmed, Q.Z.; Yang, L.-L. Performance of hybrid direct-sequence time-hopping ultrawide bandwidth systems in Nakagami-m fading channels. In Proceedings of the IEEE 18th International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC’2007), Athens, Greece, 18–21 September 2007. [Google Scholar]
- Che, F.; Ahmed, A.; Ahmed, Q.Z.; Zaidi, S.A.R.; Shakir, M.Z. Machine Learning Based Approach for Indoor Localization Using Ultra-Wide Bandwidth (UWB) System for Industrial Internet of Things (IIoT). In Proceedings of the 2020 International Conference on UK-China Emerging Technologies (UCET), Glasgow, UK, 20–21 August 2020. [Google Scholar]
- Ahmed, Q.; Che, F.; Shakir, M.Z.; Ahmed, A. Artificial intelligence for localisation of ultra-wide bandwidth (UWB) sensor nodes. In AI for Emerging Verticals: Human-Robot Computing, Sensing and Networking (Computing and Networks); Shakir, M.Z., Ramzan, N., Eds.; IET: Glasgow, UK, 2020. [Google Scholar]
- Li, Z.; Li, X.; Mou, G.; Jiang, D.; Bao, X.; Wang, Y. Design of Localization System Based on Ultra-Wideband and Long Range Wireless. In Proceedings of the 2019 IEEE 11th International Conference on Advanced Infocomm Technology (ICAIT), Jinan, China, 18–20 October 2019; pp. 142–146. [Google Scholar]
- Yarovoy, A.G.; Ligthart, L.P.; Matuzas, J.; Levitas, B. UWB radar for human being detection. IEEE Aerosp. Electron. Syst. Mag. 2006, 21, 10–14. [Google Scholar] [CrossRef] [Green Version]
- Cotton, S.L.; Scanlon, W.G. An Experimental Investigation into the Influence of User State and Environment on Fading Characteristics in Wireless Body Area Networks at 2.45 GHz. IEEE Trans. Wirel. Commun. 2009, 8, 6–12. [Google Scholar] [CrossRef]
- Kolakowski, J.; Djaja-Josko, V. UWB positioning system for elderly persons tracking in IONIS AAL platform. In Proceedings of the 2017 25th Telecommunication Forum (TELFOR), Belgrade, Serbia, 21–22 November 2017; pp. 1–4. [Google Scholar]
- Kolakowski, J.; Djaja-Josko, V.; Kolakowski, M.; Broczek, K. UWB/BLE Tracking System for Elderly People Monitoring. Sensors 2020, 20, 1574. [Google Scholar] [CrossRef] [Green Version]
- Lazaro, A.; Girbau, D.; Villarino, R. Analysis of vital signs monitoring using an IR-UWB radar. Prog. Electromagn. Res. 2010, 100, 265–284. [Google Scholar] [CrossRef] [Green Version]
- Gezici, S. Theoretical limits for estimtion of periodic movements in pulse-based UWB systems. IEEE J. Sel. Top. Signal Process. 2007, 1, 405–417. [Google Scholar] [CrossRef] [Green Version]
- Hu, B.; Beaulieu, N.C. Pulse shapes for ultrawideband communication systems. IEEE Trans. Wirel. Commun. 2005, 4, 1789–1797. [Google Scholar]
- Beaulieu, N.C.; Hu, B. On determining a best pulse shape for multiple access ultra-wideband communication systems. IEEE Trans. Wirel. Commun. 2008, 7, 3589–3596. [Google Scholar] [CrossRef]
- Foerster, J. Channel Modeling Sub-Committee Report Final; IEEE, Technical Report IEEE P802.15-02/490rl-SG3a; IEEE: Piscataway, NJ, USA, 2003. [Google Scholar]
- Molisch, A.F.; Foerster, J.R.; Pendergrass, M. Channel models for ultrawideband personal area networks. IEEE Wirel. Commun. 2003, 10, 14–21. [Google Scholar] [CrossRef]
- Molisch, A.F.; Cassioli, D.; Chong, C.C.; Emami, S.; Fort, A.; Kannan, B.; Karedal, J.; Schantz, H.G.; Siwiak, K.; Win, M.Z. A Comprehensive Standardized Model for Ultrawideband Propagation Channels. IEEE Trans. Antennas Propag. 2006, 54, 3151–3166. [Google Scholar] [CrossRef] [Green Version]
- Karedal, J.; Wyne, S.; Almers, P.; Tufvesson, F.; Molisch, A.F. Statistical analysis of the UWB channel in an industrial environment. In Proceedings of the IEEE 60th Vehicular Technology Conference 2004, VTC2004-Fall, Los Angeles, CA, USA, 26–29 September 2004; Volume 1, pp. 81–85. [Google Scholar]
- Molisch, A.F.; Balakrishnan, K.; Chong, C.-C.; Emami, S.; Fort, A.; Karedal, J.; Kunisch, J.; Schantz, H.; Schuster, U.; Siwiak, K. IEEE 802.15.4a Channel Model—Final Report IEEE. 2004. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.119.2038&rep=rep1&type=pdf (accessed on 23 April 2021).
- Ahmed, Q.Z.; Liu, W.; Yang, L. Least Mean Square Aided Adaptive Detection in Hybrid Direct-Sequence Time-Hopping Ultrawide Bandwidth Systems. In Proceedings of the VTC Spring 2008—IEEE Vehicular Technology Conference, Marina Bay, Singapore, 11–14 May 2008; pp. 1062–1066. [Google Scholar] [CrossRef]
- Ahmed, Q.Z.; Yang, L. Normalised Least Mean-Square Aided Decision-Directed Adaptive Detection in Hybrid Direct-Sequence Time-Hopping UWB Systems. In Proceedings of the 2008 IEEE 68th Vehicular Technology Conference, Calgary, AB, Canada, 21–24 September 2008; pp. 1–5. [Google Scholar] [CrossRef]
- Ahmed, Q.Z.; Alouini, M.S.; Aissa, S. Bit Error-Rate Minimizing Detector for Amplify and Forward Relaying Systems Using Generalized Gaussian Kernel. IEEE Signal Process. Lett. 2013, 20, 55–58. [Google Scholar] [CrossRef] [Green Version]
- Simon, M.K.; Alouini, M.-S. Digital Communication over Fading Channels; Wiley Series in Telecommunications and Signal Processing; Wiley: Hoboken, NJ, USA, 2005. [Google Scholar]
- Sana, F.; Ballal, T.; Al-Naffouri, T.Y.; Hoteit, I. Low-complexity wireless monitoring of respiratory movements using ultra-wideband impulse response estimation. Biomed. Signal Process. Control. 2014, 10, 192–200. [Google Scholar] [CrossRef] [Green Version]
- Hao, K.; Gubner, J.A. The distribution of sums of path gains in the IEEE 802.15.3a UWB channel model. IEEE Trans. Wirel. Commun. 2007, 6, 811–816. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Path Loss exponent | n | 1.2 |
| Shadowing Standard Deviation | 6 dB | |
| Path Loss at 1 m distance | 56.7 dB | |
| Antenna Loss | 3 dB | |
| Frequency dependence of Path Loss | −1.103 | |
| Nakagami-m factor mean | 0.36 dB | |
| Nakagami-m factor variance | 1.13 | |
| Nakagami-m for strong components | 12.99 dB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abbas, W.B.; Che, F.; Ahmed, Q.Z.; Khan, F.A.; Alade, T. Device Free Detection in Impulse Radio Ultrawide Bandwidth Systems. Sensors 2021, 21, 3255. https://doi.org/10.3390/s21093255
Abbas WB, Che F, Ahmed QZ, Khan FA, Alade T. Device Free Detection in Impulse Radio Ultrawide Bandwidth Systems. Sensors. 2021; 21(9):3255. https://doi.org/10.3390/s21093255
Chicago/Turabian StyleAbbas, Waqas Bin, Fuhu Che, Qasim Zeeshan Ahmed, Fahd Ahmed Khan, and Temitope Alade. 2021. "Device Free Detection in Impulse Radio Ultrawide Bandwidth Systems" Sensors 21, no. 9: 3255. https://doi.org/10.3390/s21093255
APA StyleAbbas, W. B., Che, F., Ahmed, Q. Z., Khan, F. A., & Alade, T. (2021). Device Free Detection in Impulse Radio Ultrawide Bandwidth Systems. Sensors, 21(9), 3255. https://doi.org/10.3390/s21093255