
Asynchronous Chirp Slope Keying for Underwater Acoustic Communication

 ,
,  , , , , and
, , , , and
Abstract
:1. Introduction
1.1. Historical Overview
1.2. Research Problem
1.3. Related Work
2. Materials and Methods
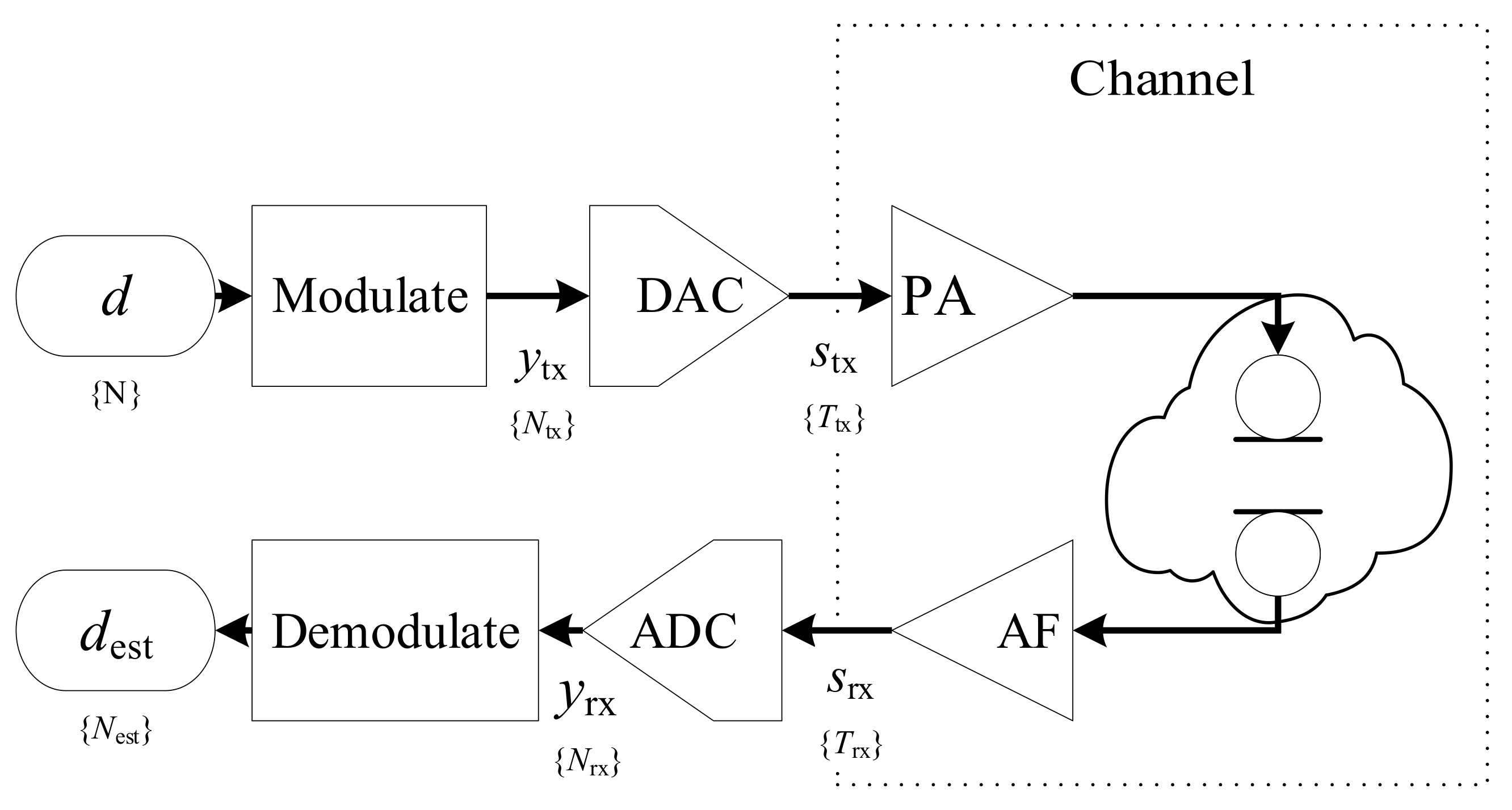
2.1. Basic System Structure
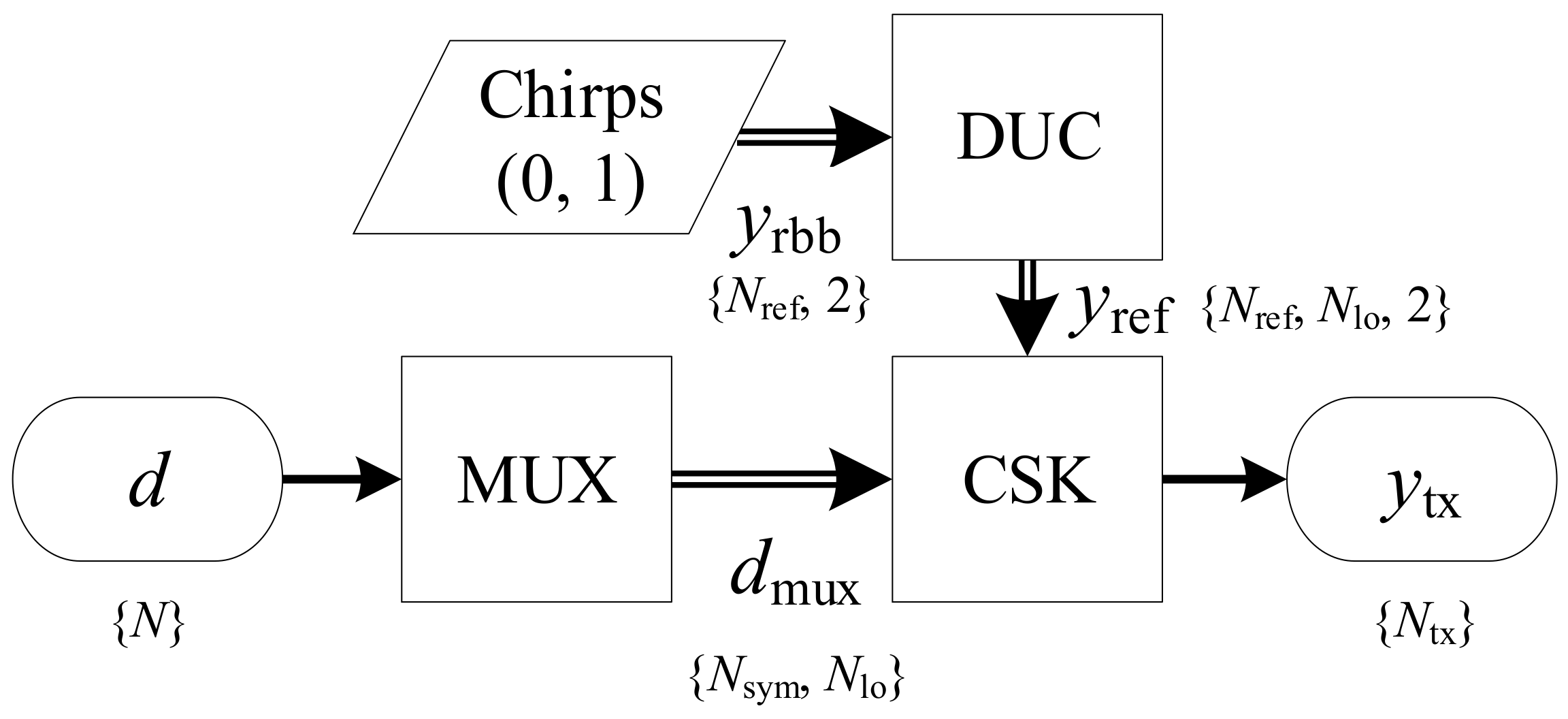
2.2. Modulation
2.2.1. Linear Chirp Creation
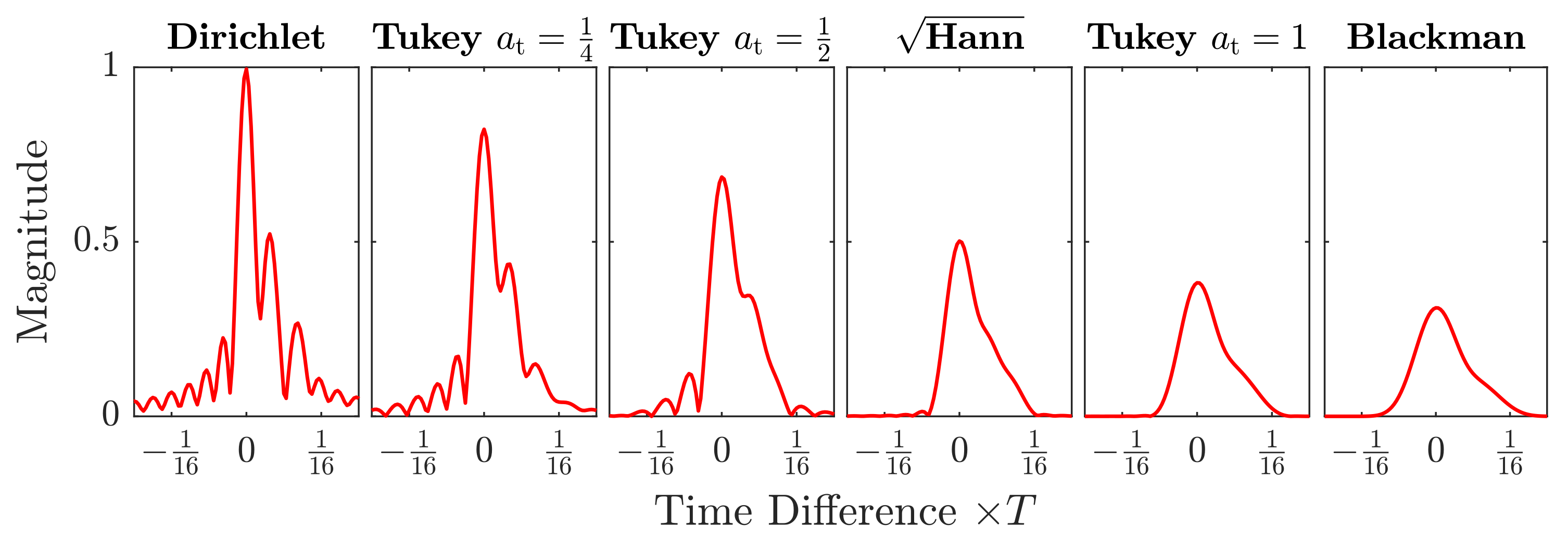
2.2.2. Shaping
2.2.3. Input Multiplexing
2.2.4. Chirp Slope Keying
2.3. Channel Model
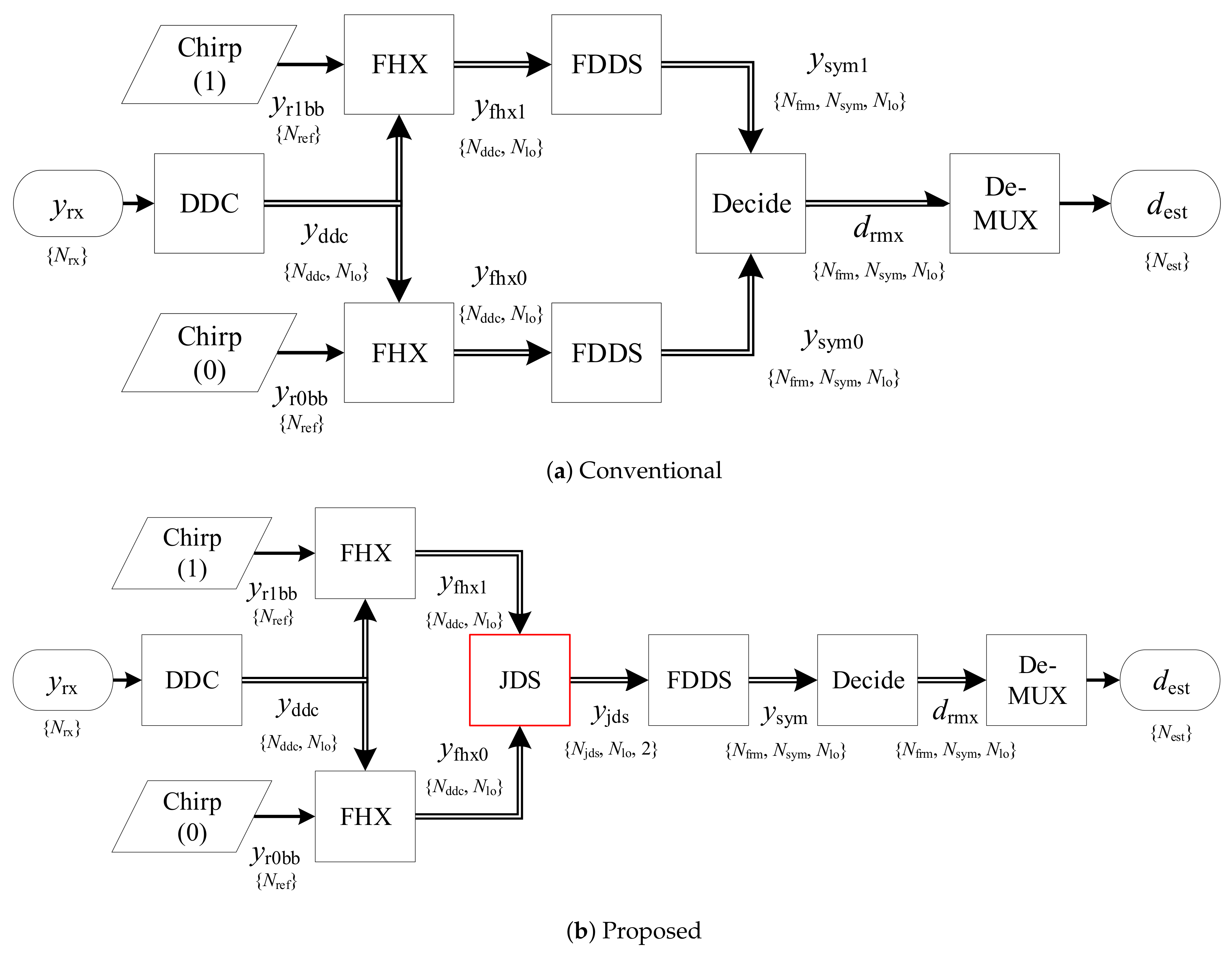
2.4. Demodulation
2.4.1. Digital Down-Converter
2.4.2. Pulse Compression by Fast Hilbert Cross-Correlation
2.4.3. Join & Downsample
2.4.4. Frame Detect & Downsample
2.4.5. Symbol Decision
2.4.6. De-Multiplexing
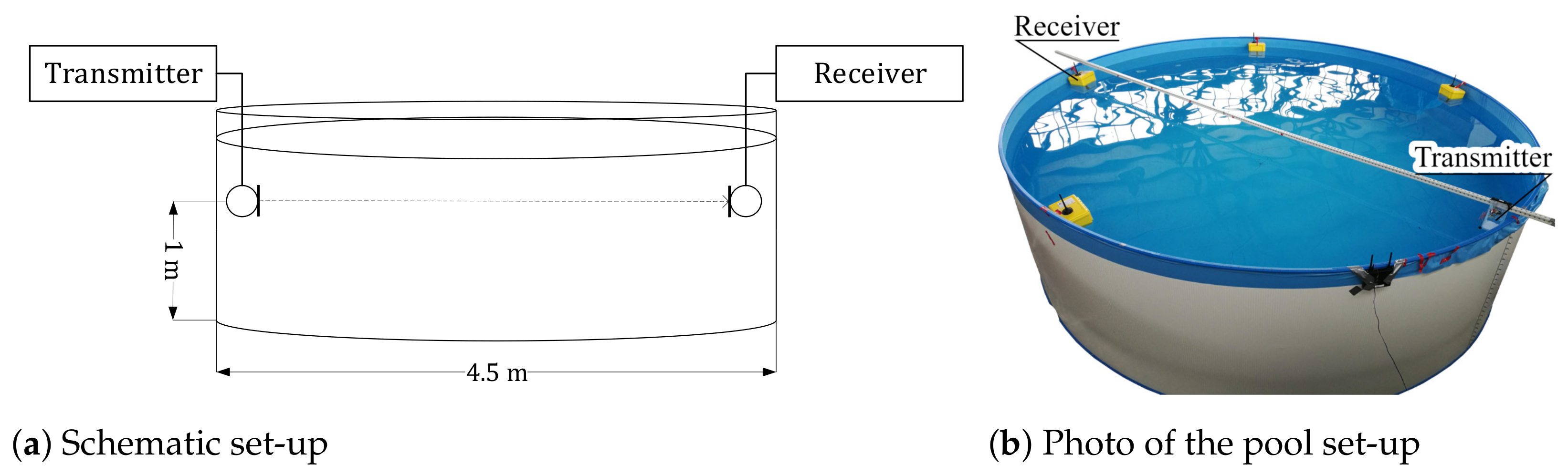
2.5. Experimental Set-Up
2.5.1. Frequency Band Considerations
2.5.2. Experiment Parameters
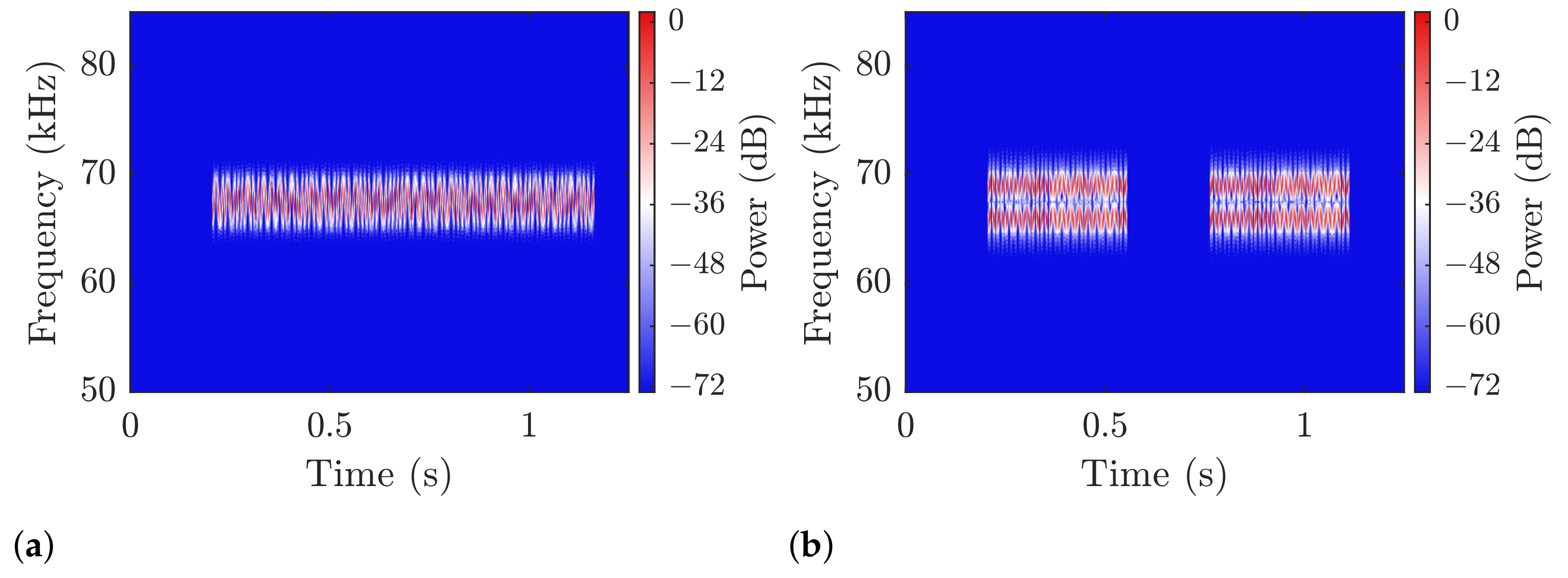
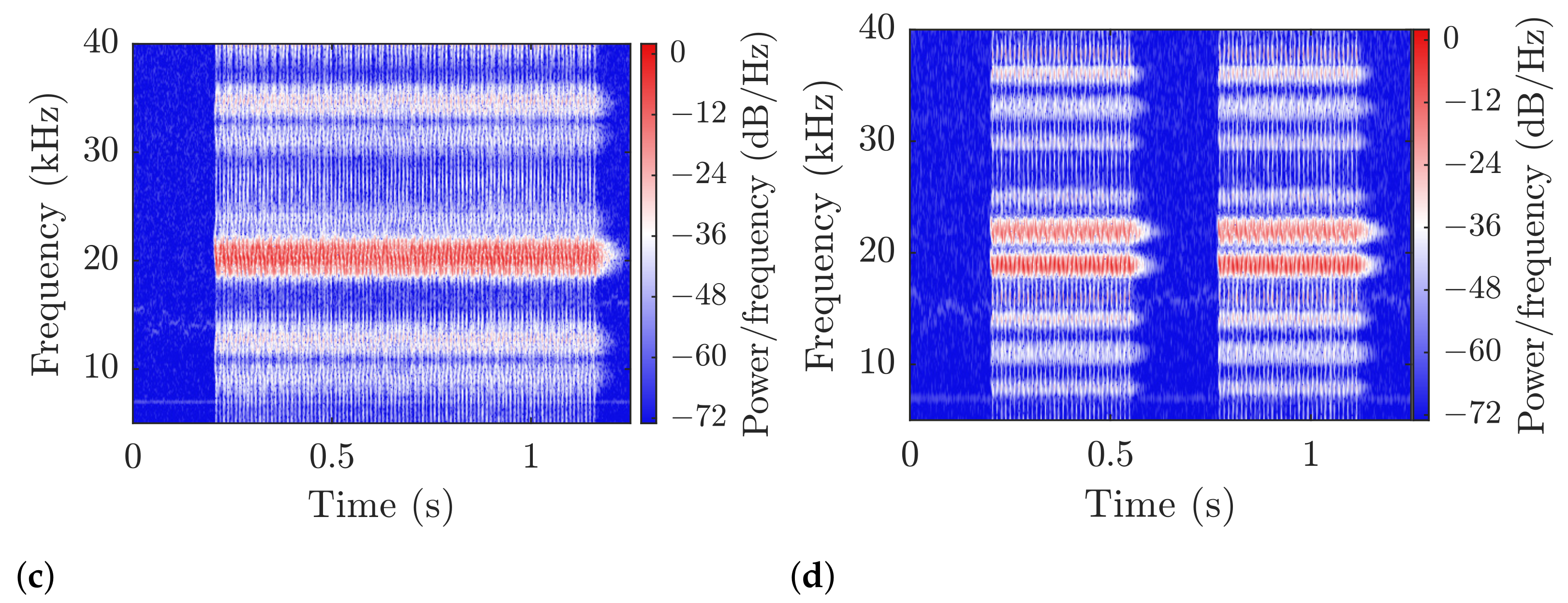
3. Results
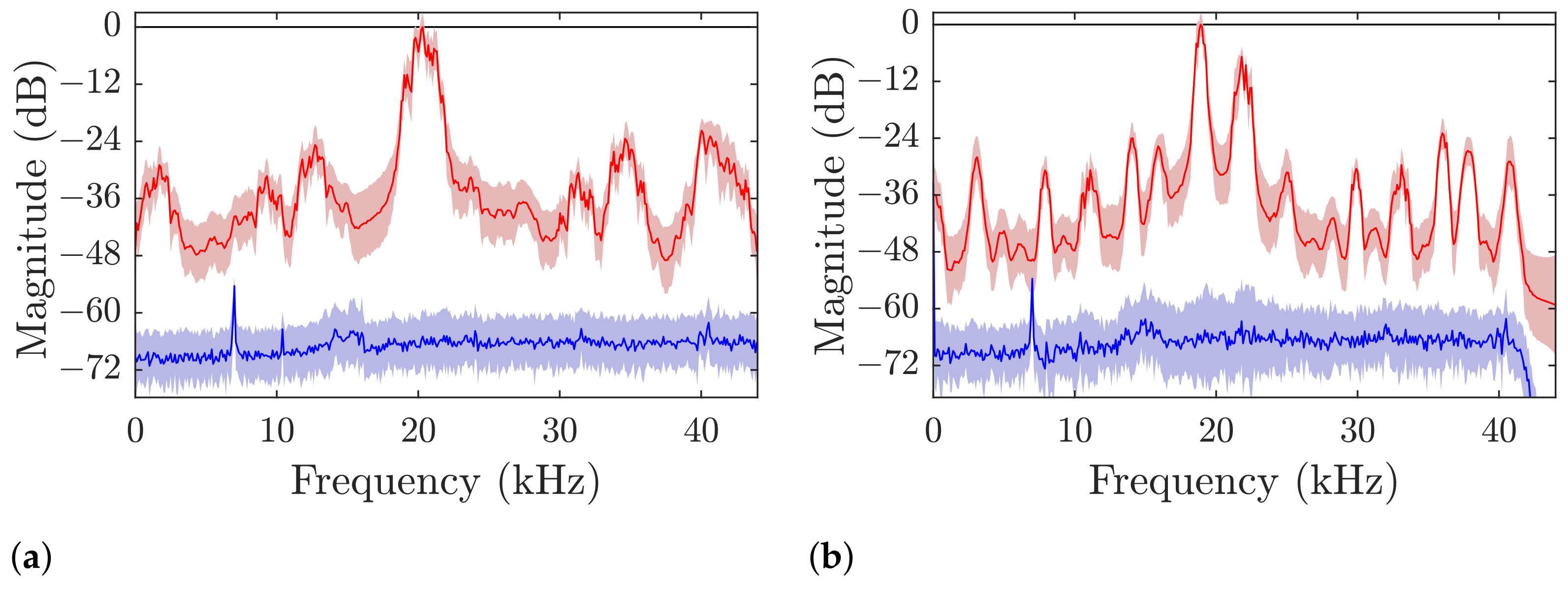
Channel Frequency Response
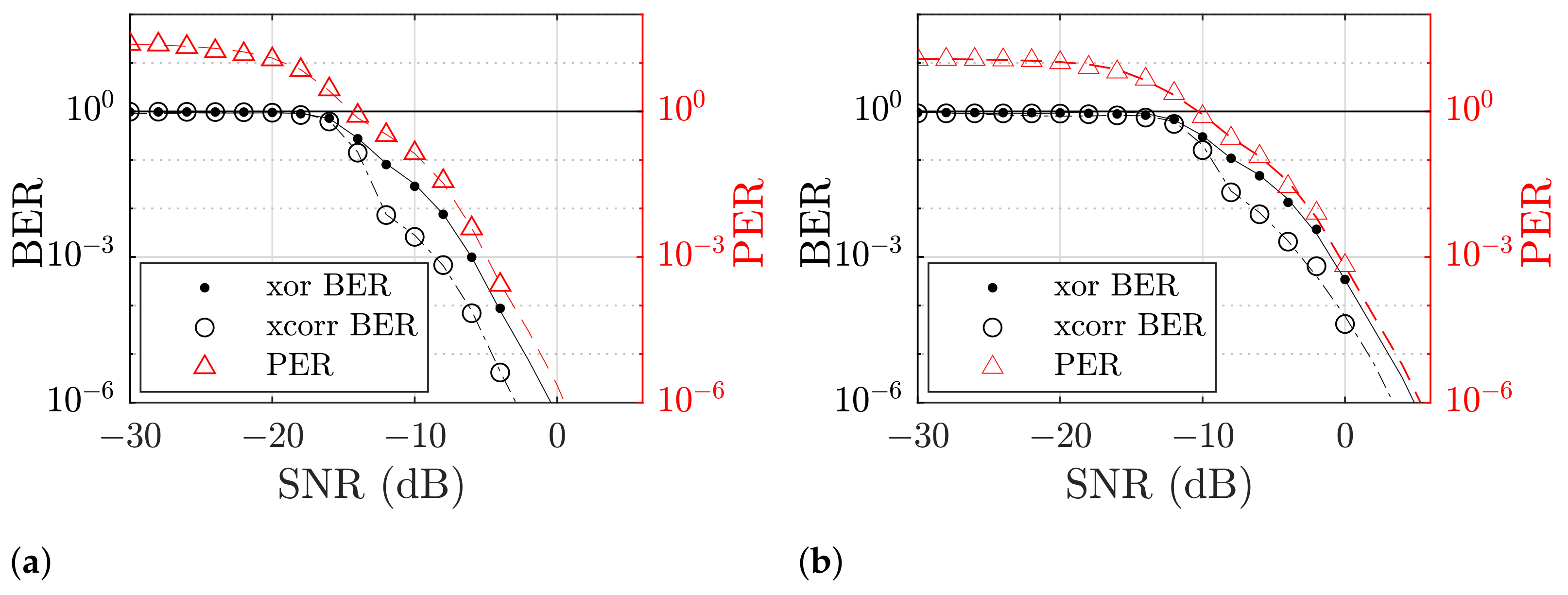
4. Bit Error Rate and Packet Error Rate Simulations
5. Discussion
6. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AF | Active Filter |
| AWGN | Additive White Gaussian Noise |
| BB | Baseband |
| BER | Bit Error Rate |
| BPF | Bandpass Filter |
| CSS | Chirp-Spread Spectrum |
| CSK | Chirp Slope Keying |
| DDC | Digital Down-Converter |
| DUC | Digital Up-Converter |
| FDDS | Frame Detect & Downsample |
| FrFT | Fractional Fourier Transform |
| FHX | Fast Hilbert Cross-Correlator |
| FSK | Frequency Shift Keying |
| JDS | Join & Downsample |
| LFM | Linear Frequency Modulation |
| LPF | Lowpass Filter |
| MUX | Multiplexer |
| PA | Power Amplifier |
| PER | Packet Error Rate |
| RX | Received or Receiver |
| SNR | Signal-to-Noise Ratio |
| TB | Time-Bandwidth Product |
| TX | Transmitted or Transmitter |
| UAV | Underwater Autonomous Vehicle |
| XOR | Exclusive Or Operation |
| XCorr | Cross-Correlation |
Appendix A
| Algorithm A1: Linear Chirp Generation. |
| input : start frequency, T length of chirp in seconds, end frequency, sampling frequency. output: y 1-D vector containing a real-valued linear chirp sequence // Translate frequency input into relative frequencies: 1 ; 2 ; // Prepare sample time: 3 ; 4 ; // Calculate the shaping window 5 ; // The discrete sampled time limited chirp signal is calculated as follows: 6 ; 7 ; // Furthermore, lastly the shaping function is simply superposed: 8 ; |
| Algorithm A2: Partially Constructed Tukey Window. |
| input : N length of window in samples, a taper fraction. output: y 1-D vector containing a real-valued window sequence // Prepare taper thresholds: 1 ; // Calculate 1st leg: Up slope 2 ; 3 ; // Calculate 2nd leg: Flat top 4 ; 5 ; // Calculate 3rd leg: Down slope 6 ; 7 ; 8 ; // Join legs: 9 ; |
| Algorithm A3: Digital Up-Conversion. |
 |
| Algorithm A4: Digital Down-Conversion. |
 |
| Algorithm A5: Chirp Slope Keying Modulator. |
 |
References
- Batchelder, J.M. Submarine Signal. U.S. Patent 368272, 16 August 1887. [Google Scholar]
- Gray, E.; Mundy, A.J. Transmission of Sound. U.S. Patent 636519, 7 November 1899. [Google Scholar]
- Mundy, A.J.; Gale, H.B. Apparatus for Producing Submarine Sound-Signals. U.S. Patent 842327, 29 January 1907. [Google Scholar]
- Stojanovic, M.; Catipovic, J.; Proakis, J.G. Adaptive multichannel combining and equalization for underwater acoustic communications. J. Acoust. Soc. Am. 1993, 94, 1621–1631. [Google Scholar] [CrossRef]
- Stojanovic, M. Recent advances in high-speed underwater acoustic communications. IEEE J. Ocean. Eng. 1996, 21, 125–136. [Google Scholar] [CrossRef]
- Sharif, B.S.; Neasham, J.; Hinton, O.R.; Adams, A.E. A computationally efficient Doppler compensation system for underwater acoustic communications. IEEE J. Ocean. Eng. 2000, 25, 52–61. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Challenges for efficient communication in underwater acoustic sensor networks. ACM Sigbed Rev. 2004, 1, 3–8. [Google Scholar] [CrossRef]
- Steinmetz, F.; Heitmann, J.; Renner, C. A Practical Guide to Chirp Spread Spectrum for Acoustic Underwater Communication in Shallow Waters. In Proceedings of the Thirteenth ACM International Conference on Underwater Networks & Systems, Shenzhen, China, 3–5 December 2018; Association for Computing Machinery: New York, NY, USA, 2018. [Google Scholar] [CrossRef]
- Steinmetz, F.; Renner, C. Resilience against Shipping Noise and Interference in Low-Power Acoustic Underwater Communication. In Proceedings of the OCEANS 2019 MTS/IEEE SEATTLE, Seattle, WA, USA, 27–31 October 2019; pp. 1–10. [Google Scholar] [CrossRef]
- Zhang, G.; Hovem, J.M.; Dong, H.; Zhou, S.; Du, S. An efficient spread spectrum pulse position modulation scheme for point-to-point underwater acoustic communication. Appl. Acoust. 2010, 71, 11–16. [Google Scholar] [CrossRef]
- Xu, J.; Li, K.; Min, G. Asymmetric multi-path division communications in underwater acoustic networks with fading channels. J. Comput. Syst. Sci. 2013, 79, 269–278. [Google Scholar] [CrossRef]
- Xing, S.; Qiao, G.; Tsimenidis, C. A novel two-step Doppler compensation scheme for coded OFDM underwater acoustic communication systems. Procceedings of the 4th Underwater Acoustics Conference and Exhibition UACE2017, Skiathos, Greece, 3–8 September 2017; pp. 351–356. [Google Scholar]
- Domingo, M.C. Overview of channel models for underwater wireless communication networks. Phys. Commun. 2008, 1, 163–182. [Google Scholar] [CrossRef]
- Hovem, J.M. Underwater acoustics: Propagation, devices and systems. J. Electroceramics 2007, 19, 339–347. [Google Scholar] [CrossRef]
- Popper, A.; Hastings, M. The effects of anthropogenic sources of sound on fishes. J. Fish Biol. 2009, 75, 455–489. [Google Scholar] [CrossRef]
- Radford, C.A.; Stanley, J.A.; Tindle, C.T.; Montgomery, J.C.; Jeffs, A.G. Localised coastal habitats have distinct underwater sound signatures. Mar. Ecol. Prog. Ser. 2010, 401, 21–29. [Google Scholar] [CrossRef]
- Benson, B.; Li, Y.; Faunce, B.; Domond, K.; Kimball, D.; Schurgers, C.; Kastner, R. Design of a Low-Cost Underwater Acoustic Modem. IEEE Embed. Syst. Lett. 2010, 2, 58–61. [Google Scholar] [CrossRef] [Green Version]
- Renner, B.C.; Heitmann, J.; Steinmetz, F. Ahoi: Inexpensive, Low-Power Communication and Localization for Underwater Sensor Networks and μAUVs. ACM Trans. Sen. Netw. 2020, 16. [Google Scholar] [CrossRef] [Green Version]
- Schott, D.J.; Faisal, M.; Höeflinger, F.; Reindl, L.M.; Bordoy Andreú, J.; Schindelhauer, C. Underwater localization utilizing a modified acoustic indoor tracking system. In Proceedings of the 2017 IEEE 7th International Conference on Underwater System Technology: Theory and Applications (USYS), Kuala Lumpur, Malaysia, 18–20 December 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Khyam, M.O.; Xinde, L.; Ge, S.S.; Pickering, M.R. Multiple Access Chirp-Based Ultrasonic Positioning. IEEE Trans. Instrum. Meas. 2017, 66, 3126–3137. [Google Scholar] [CrossRef]
- Renner, C.; Golkowski, A.J. Acoustic Modem for Micro AUVs: Design and Practical Evaluation. In Proceedings of the 11th ACM International Conference on Underwater Networks & Systems, Shanghai, China, 24–26 October 2016; Association for Computing Machinery: New York, NY, USA, 2016. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhao, A.; Hui, J.; Hou, B.; Sotudeh, R.; Niu, F. A Frequency-Domain Adaptive Matched Filter for Active Sonar Detection. Sensors 2017, 17, 1565. [Google Scholar] [CrossRef] [Green Version]
- Bernard, C.; Bouvet, P.J.; Pottier, A.; Forjonel, P. Multiuser Chirp Spread Spectrum Transmission in an Underwater Acoustic Channel Applied to an AUV Fleet. Sensors 2020, 20, 1527. [Google Scholar] [CrossRef] [Green Version]
- Danckaers, A.; Seto, M.L. Transmission of images by unmanned underwater vehicles. Auton. Robot. 2020, 44, 24–44. [Google Scholar] [CrossRef]
- Syed, A.A. Understanding and Exploiting the Acoustic Propagation Delay in Underwater Sensor Networks. Ph.D. Thesis, Faculty of the Graduate School, Los Angeles, CA, USA, 2009. [Google Scholar]
- Fattah, S.; Gani, A.; Ahmedy, I.; Idris, M.Y.I.; Targio Hashem, I.A. A Survey on Underwater Wireless Sensor Networks: Requirements, Taxonomy, Recent Advances, and Open Research Challenges. Sensors 2020, 20, 5393. [Google Scholar] [CrossRef]
- Senter, P. Voices of the past: A review of Paleozoic and Mesozoic animal sounds. Hist. Biol. 2008, 20, 255–287. [Google Scholar] [CrossRef] [Green Version]
- Hüttmann, E. Distance Measurement Method. DE 768068C, 10 June 1955. [Google Scholar]
- Price, R.; Turin, G. Communication and radar—Section A. IEEE Trans. Inf. Theory 1963, 9, 240–246. [Google Scholar] [CrossRef]
- Cook, C.E. Linear FM Signal Formats for Beacon and Communication Systems. IEEE Trans. Aerosp. Electron. Syst. 1974, AES-10, 471–478. [Google Scholar] [CrossRef]
- Darlington, S. Pulse Transmission. U.S. Patent 2678997A, 18 May 1954. [Google Scholar]
- Burnsweig, J.; Wooldridge, J. Ranging and Data Transmission Using Digital Encoded FM-“Chirp” Surface Acoustic Wave Filters. IEEE Trans. Microw. Theory Tech. 1973, 21, 272–279. [Google Scholar] [CrossRef]
- Kim, J.; Pratt, T.; Ha, T. Coded multiple chirp spread spectrum system and overlay service. In The Twentieth Southeastern Symposium on System Theory; IEEE Computer Society: Los Alamitos, CA, USA, 1988; pp. 336–341. [Google Scholar] [CrossRef]
- TCo. SX1272/3/6/7/8: LoRa Modem Designer’s Guide, Technical Report AN1200.13; Semtech Corporation: Camarillo, CA, USA, 2013; Revision 1. [Google Scholar]
- Ferré, G.; Giremus, A. LoRa Physical Layer Principle and Performance Analysis. In Proceedings of the 2018 25th IEEE International Conference on Electronics, Circuits and Systems (ICECS), Bordeaux, France, 9–12 December 2018; pp. 65–68. [Google Scholar] [CrossRef] [Green Version]
- Schott, D.J.; Faisal, M.; Höflinger, F.; Reindl, L.M. A Multichannel Acoustic Chirp-Spread Modulation Approach Towards Diver-to-Diver Communication. In Proceedings of the 2018 15th International Multi-Conference on Systems, Signals Devices (SSD), Yasmine Hammamet, Tunisia, 19–22 March 2018; pp. 475–479. [Google Scholar] [CrossRef]
- Kaminsky, E.J.; Simanjuntak, L. Chirp slope keying for underwater communications. In Sensors, and Command, Control, Communications, and Intelligence (C3I) Technologies for Homeland Security and Homeland Defense IV; Carapezza, E.M., Ed.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2005; Volume 5778, pp. 894–905. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.; Kim, T.H.; Choi, J.W.; Choi, S. Chirp signal-based aerial acoustic communication for smart devices. In Proceedings of the 2015 IEEE Conference on Computer Communications (INFOCOM), Hong Kong, China, 26 April–1 May 2015; pp. 2407–2415. [Google Scholar] [CrossRef]
- Kebkal, K.G.; Bannasch, R. Sweep-spread carrier for underwater communication over acoustic channels with strong multipath propagation. J. Acoust. Soc. Am. 2002, 112, 2043–2052. [Google Scholar] [CrossRef]
- He, C.; Huang, J.; Zhang, Q.; Lei, K. Reliable Mobile Underwater Wireless Communication Using Wideband Chirp Signal. In Proceedings of the 2009 WRI International Conference on Communications and Mobile Computing, Kunming, China, 6–8 January 2009; Volume 1, pp. 146–150. [Google Scholar] [CrossRef]
- Demirors, E.; Melodia, T. Chirp-Based LPD/LPI Underwater Acoustic Communications with Code-Time-Frequency Multidimensional Spreading. In Proceedings of the 11th ACM International Conference on Underwater Networks & Systems, Shanghai, China, 24–26 October 2016; Association for Computing Machinery: New York, NY, USA, 2016. [Google Scholar] [CrossRef] [Green Version]
- Yuan, F.; Wei, Q.; Cheng, E. Multiuser chirp modulation for underwater acoustic channel based on VTRM. Int. J. Nav. Archit. Ocean. Eng. 2017, 9, 256–265. [Google Scholar] [CrossRef] [Green Version]
- Diamant, R. Robust Interference Cancellation of Chirp and CW Signals for Underwater Acoustics Applications. IEEE Access 2018, 6, 4405–4415. [Google Scholar] [CrossRef]
- Lee, J.; An, J.; Ra, H.I.; Kim, K. Long-Range Acoustic Communication Using Differential Chirp Spread Spectrum. Appl. Sci. 2020, 10, 8835. [Google Scholar] [CrossRef]
- Proakis, J.G.; Salehi, M. Elements of a Digital Communication System. In Digital Communications; Chapter 1.1; McGraw Hill: New York, NY, USA, 2008; p. 2. [Google Scholar]
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef] [Green Version]
- Behar, V.; Adam, D. Parameter optimization of pulse compression in ultrasound imaging systems with coded excitation. Ultrasonics 2004, 42, 1101–1109. [Google Scholar] [CrossRef]
- Proakis, J.G.; Manolakis, D.G. Design of Linear-Phase FIR Filters Using Windows. In Digital Signal Processing; Chapter 10.2.2; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2008; pp. 664–670. [Google Scholar]
- Cariow, A.; Paplinski, J.P. Some Algorithms for Computing Short-Length Linear Convolution. Electronics 2020, 9, 2115. [Google Scholar] [CrossRef]
- Aguilera, T.; Álvarez, F.J.; Paredes, J.A.; Moreno, J.A. Doppler compensation algorithm for chirp-based acoustic local positioning systems. Digit. Signal Process. 2020, 100, 102704. [Google Scholar] [CrossRef]
- Hoeflinger, F.; Hoppe, J.; Zhang, R.; Ens, A.; Reindl, L.; Wendeberg, J.; Schindelhauer, C. Acoustic indoor-localization system for smart phones. In Proceedings of the 2014 IEEE 11th International Multi-Conference on Systems, Signals Devices (SSD14), Barcelona, Spain, 11–14 February 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Chapuis, L.; Collin, S.P.; Yopak, K.E.; McCauley, R.D.; Kempster, R.M.; Ryan, L.A.; Schmidt, C.; Kerr, C.C.; Gennari, E.; Egeberg, C.A.; et al. The effect of underwater sounds on shark behaviour. Sci. Rep. 2019, 9, 6924. [Google Scholar] [CrossRef] [Green Version]
- Ahn, J.; Lee, H.; Kim, Y.; Lee, S.; Chung, J. Mimicking dolphin whistles with continuously varying carrier frequency modulation for covert underwater acoustic communication. Jpn. J. Appl. Phys. 2019, 58, SGGF05. [Google Scholar] [CrossRef]
- Ketten, D.R. The Marine Mammal Ear: Specializations for Aquatic Audition and Echolocation. In The Evolutionary Biology of Hearing; Webster, D.B., Popper, A.N., Fay, R.R., Eds.; Springer: New York, NY, USA, 1992; pp. 717–750. [Google Scholar] [CrossRef]
- Ketten, D.R. Functional analyses of whale ears: Adaptations for underwater hearing. In Proceedings of the OCEANS’94, Brest, France, 13–16 September 1994; Volume 1, pp. I/264–I/270. [Google Scholar] [CrossRef]
- Houser, D.S.; Finneran, J.J. A comparison of underwater hearing sensitivity in bottlenose dolphins (Tursiops truncatus) determined by electrophysiological and behavioral methods. J. Acoust. Soc. Am. 2006, 120, 1713–1722. [Google Scholar] [CrossRef] [PubMed]
- Hemilä, S.; Nummela, S.; Reuter, T. Anatomy and physics of the exceptional sensitivity of dolphin hearing (Odontoceti: Cetacea). J. Comp. Physiol. A 2010, 196, 165–179. [Google Scholar] [CrossRef] [PubMed]
- Nummela, S.; Thewissen, J.; Bajpai, S.; Hussain, T.; Kumar, K. Sound transmission in archaic and modern whales: Anatomical adaptations for underwater hearing. Anat. Rec. 2007, 290, 716–733. [Google Scholar] [CrossRef]
- Boisvert, C.A.; Johnston, P.; Trinajstic, K.; Johanson, Z. Chondrichthyan Evolution, Diversity, and Senses. In Heads, Jaws, and Muscles: Anatomical, Functional, and Developmental Diversity in Chordate Evolution; Ziermann, J.M., Diaz, R.E., Jr., Diogo, R., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 65–91. [Google Scholar] [CrossRef]
- Kastelein, R.A.; Wensveen, P.; Hoek, L.; Terhune, J.M. Underwater hearing sensitivity of harbor seals (Phoca vitulina) for narrow noise bands between 0.2 and 80 kHz. J. Acoust. Soc. Am. 2009, 126, 476–483. [Google Scholar] [CrossRef]
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Ferreira Dias, C.; Rodrigues de Lima, E.; Fraidenraich, G. Bit Error Rate Closed-Form Expressions for LoRa Systems under Nakagami and Rice Fading Channels. Sensors 2019, 19, 4412. [Google Scholar] [CrossRef] [Green Version]
- Proakis, J.G.; Salehi, M. Deterministic and Random Signal Analysis. In Digital Communications; Chapter 2; McGraw Hill: New York, NY, USA, 2008; p. 42. [Google Scholar]
- Elshabrawy, T.; Robert, J. Closed-Form Approximation of LoRa Modulation BER Performance. IEEE Commun. Lett. 2018, 22, 1778–1781. [Google Scholar] [CrossRef]
- National Marine Electronics Association. NMEA 2000(c) Interface Standard. Available online: https://www.nmea.org/content/STANDARDS/NMEA_2000 (accessed on 8 May 2021).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Description |
|---|---|---|
| 67.5 kHz | Center frequency | |
| 5.0 kHz | Maximal available bandwidth | |
| 88.0 kHz | Receiver sampling frequency | |
| 4 | Resampling factor after down-mixing | |
| 2 | Resampling factor after signal merge | |
| 22 kHz | Sampling frequency after 1st downsampling | |
| 11 kHz | Sampling frequency after 2nd downsampling |
| Parameter | Value | Description | |
|---|---|---|---|
| Single | Dual | ||
| N | 96 | 64 | Transmitted bits |
| 1 | 2 | Number of sub-channels | |
| 3 | 3 | Number of packages sent | |
| B | 5.0 kHz | 2.50 kHz | Bandwidth per channel |
| T | 10 ms | 10 ms | Length of a single chirp in time |
| 67.5 kHz | [66.25, 68.75] kHz | Frequency offset to band center | |
| 50 | 25 | Time-bandwidth product | |
| q | 0 | 1 | 2 | ||
|---|---|---|---|---|---|
| 0.95 | 0.8 | 0.5 | |||
| 26 | 50 | 22 | 140 | ||
| 1.3 | 0.8 | 0.02 | |||
| 27 | 50 | 22 | 140 | ||
| 0 | 24 | 2.1 | 2.0 | ||
| 0 | 50 | 25 | 140 |
| q | 0 | 1 | 2 | ||
|---|---|---|---|---|---|
| 0.60 | 0.65 | 0.65 | |||
| 9.5 | 50 | 6.8 | 43 | ||
| 1.00 | 0.15 | 1.00 | |||
| 10 | 22 | 10 | 65 | ||
| 4.0 | 6.0 | 1.8 | 1.2 | ||
| 25 | 13 | 7.1 | 43 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schott, D.J.; Gabbrielli, A.; Xiong, W.; Fischer, G.; Höflinger, F.; Wendeberg, J.; Schindelhauer, C.; Rupitsch, S.J. Asynchronous Chirp Slope Keying for Underwater Acoustic Communication. Sensors 2021, 21, 3282. https://doi.org/10.3390/s21093282
Schott DJ, Gabbrielli A, Xiong W, Fischer G, Höflinger F, Wendeberg J, Schindelhauer C, Rupitsch SJ. Asynchronous Chirp Slope Keying for Underwater Acoustic Communication. Sensors. 2021; 21(9):3282. https://doi.org/10.3390/s21093282
Chicago/Turabian StyleSchott, Dominik Jan, Andrea Gabbrielli, Wenxin Xiong, Georg Fischer, Fabian Höflinger, Johannes Wendeberg, Christian Schindelhauer, and Stefan Johann Rupitsch. 2021. "Asynchronous Chirp Slope Keying for Underwater Acoustic Communication" Sensors 21, no. 9: 3282. https://doi.org/10.3390/s21093282
APA StyleSchott, D. J., Gabbrielli, A., Xiong, W., Fischer, G., Höflinger, F., Wendeberg, J., Schindelhauer, C., & Rupitsch, S. J. (2021). Asynchronous Chirp Slope Keying for Underwater Acoustic Communication. Sensors, 21(9), 3282. https://doi.org/10.3390/s21093282