
New Methodology of Designation the Precise Aircraft Position Based on the RTK GPS Solution

 ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Related Papers
- -
- development of a mathematical algorithm to align aircraft coordinates from three independent RTK position determinations in OTF mode,
- -
- the use of the least squares method for the calculation of the proposed calculation algorithm,
- -
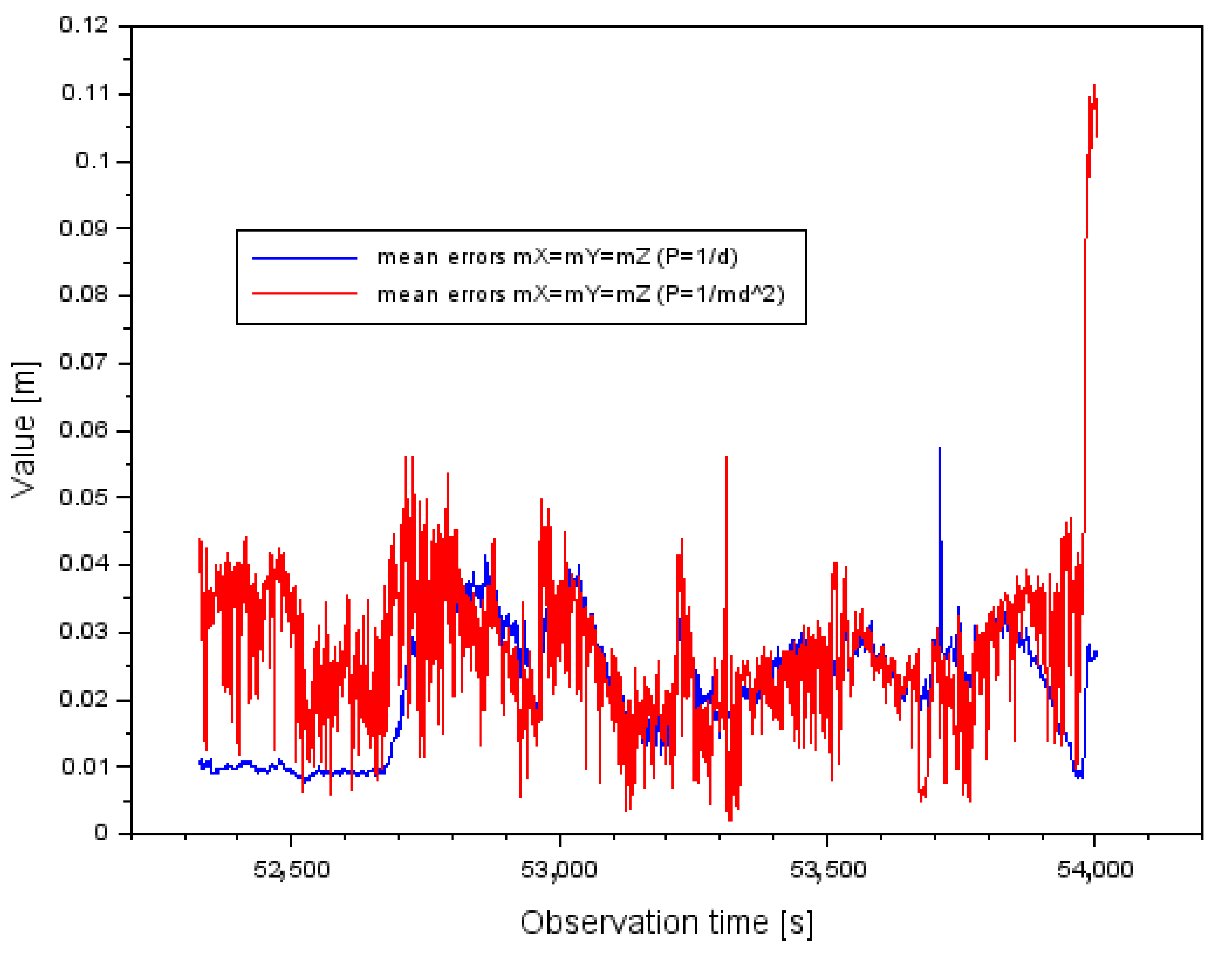
- the use of measurement weights in a stochastic process to develop aircraft coordinate results,
- -
- carry out an accuracy analysis for the proposed calculation strategy,
- -
- demonstrate that the computational algorithm used is superior to an arithmetic mean model and a mathematical model based on two independent RTK solutions in OTF mode.
3. Research Method
3.1. RTK-OTF Positioning Model for Single Baseline
3.2. RTK-OTF Positioning Model for Multiple Baselines
3.3. New Approach for RTK-OTF Technique Based on Multiple Baseline
- -
- case I:
- -
- case II:
4. Research Test
- -
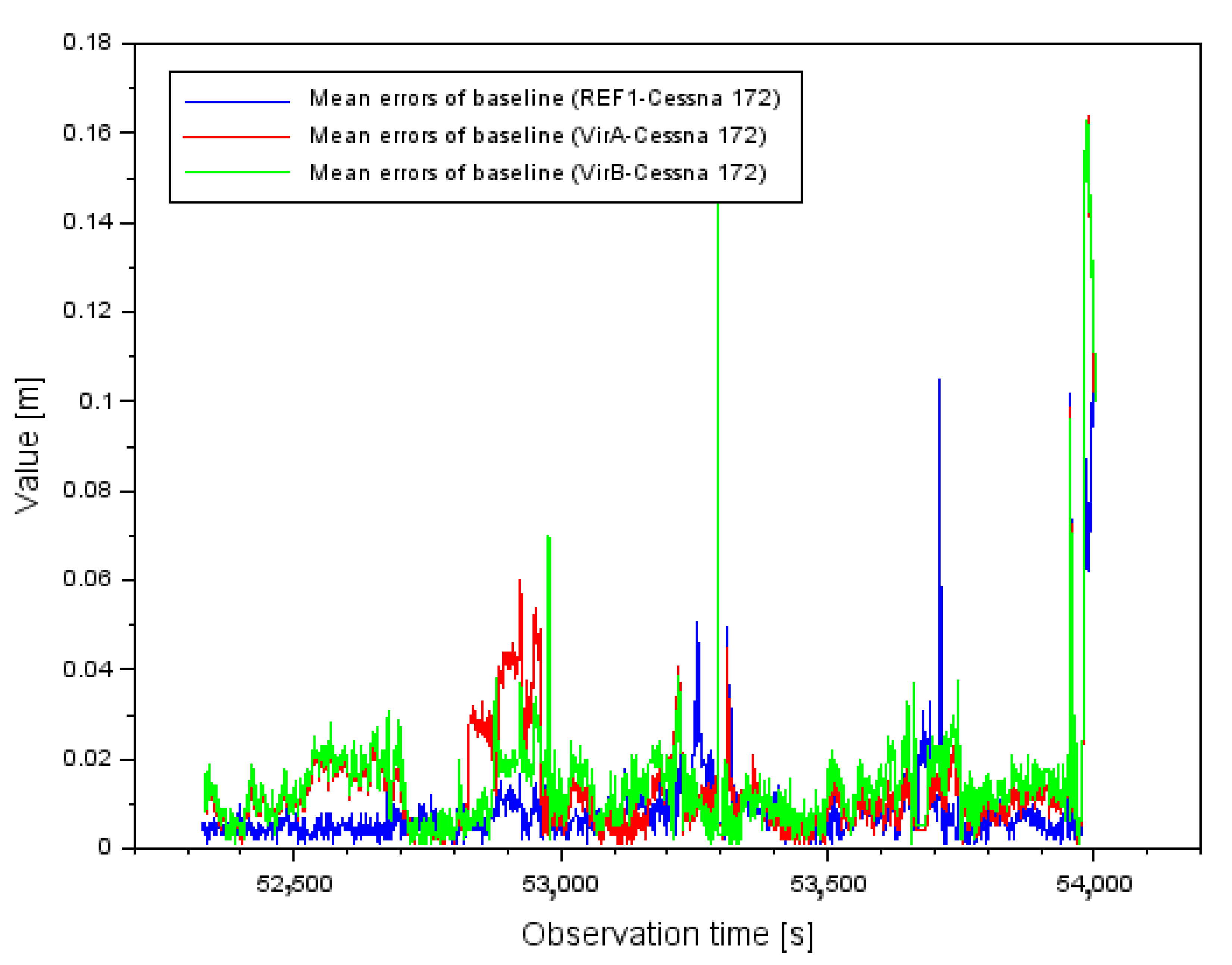
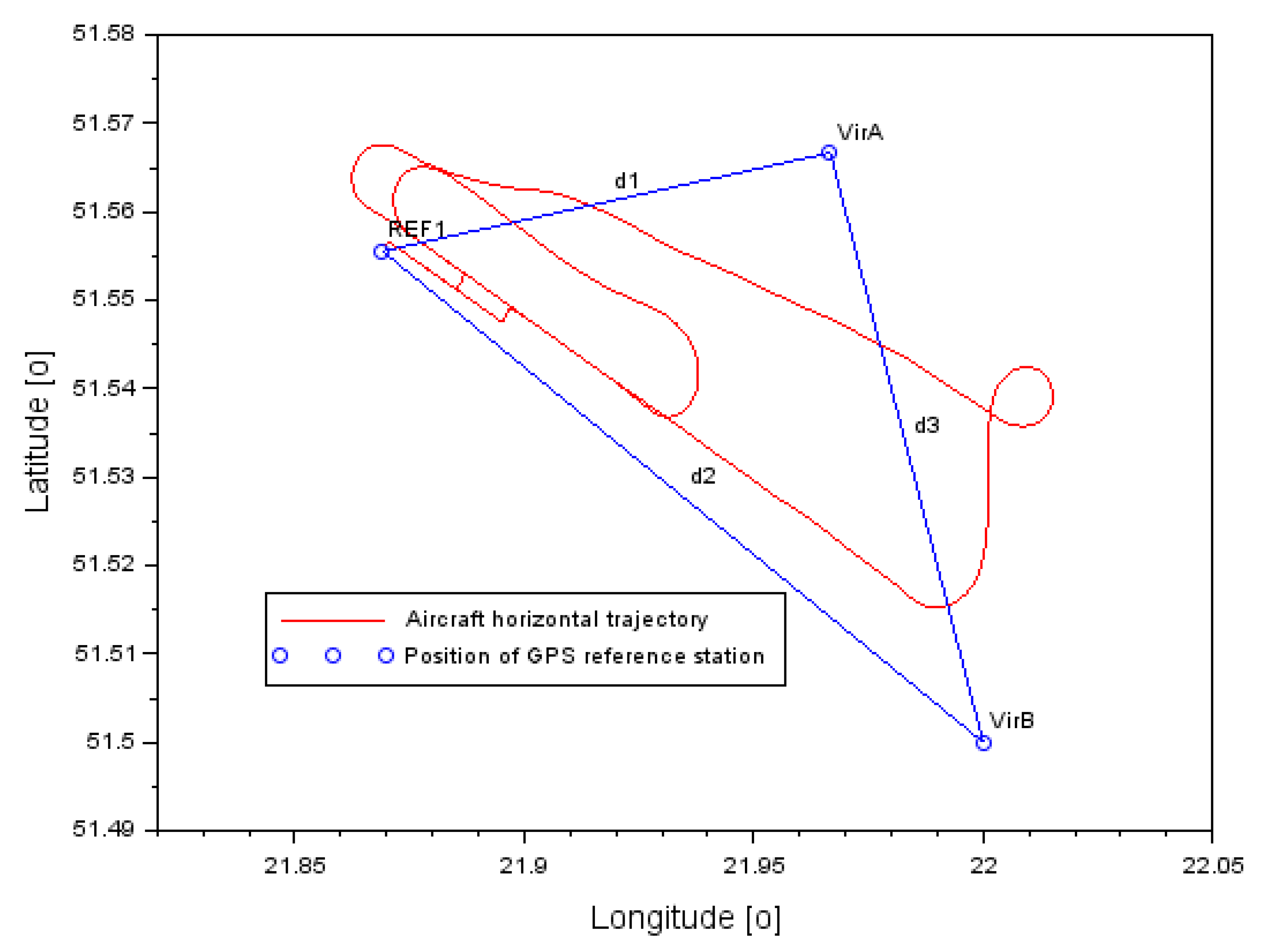
- reference station REF1–Cessna 172 aircraft (reference A,1–B,1),
- -
- virtual station VirA–Cessna 172 aircraft (identification A,2–B,2),
- -
- virtual station VirB–Cessna 172 aircraft (identification A,3–B,3).
- -
- REF1: X = 3,687,932.2628 m, Y = 1,480,229.9043 m, Z = 4,972,325.4585 m;
- -
- VirA: X = 3,684,534.5896 m, Y = 1,486,155.7033 m, Z = 4,973,133.0806 m;
- -
- VirB: X = 3,689,054.1177 m, Y = 1,490,474.6121 m, Z = 4,968,518.9789 m.
- -
- d1: distance between stations REF1 and VirA,
- -
- d2: distance between stations REF1 and VirB,
- -
- d3: distance between VirA and VirB stations.
5. Results
- -
- from −0.151 m to +0.087 m along the X axis,
- -
- from −0.290 m to +0.054 m along the Y axis,
- -
- from −0.161 m to +0.112 m along the Z axis.
6. Discussion
- -
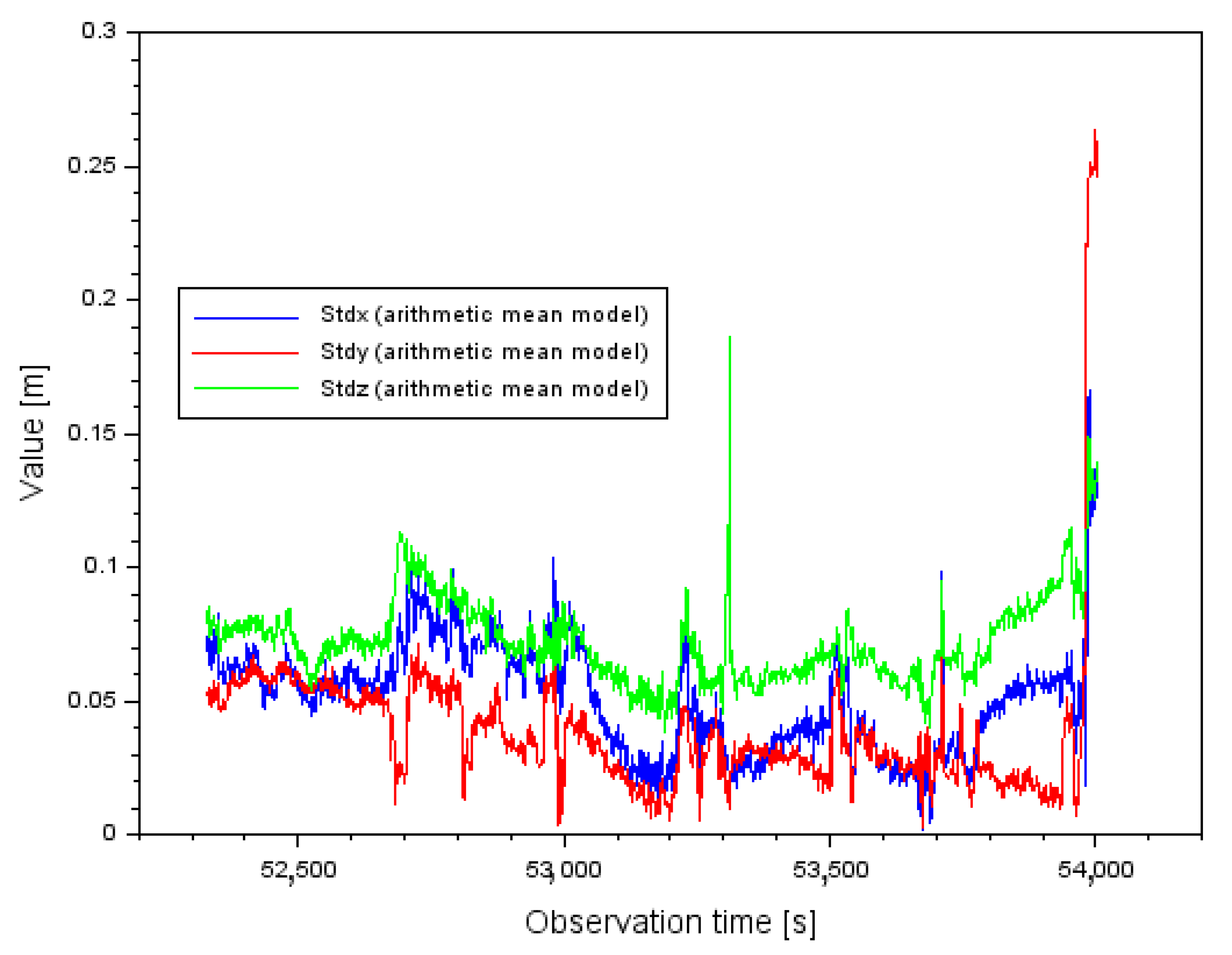
- The mean value of is equal to 0.051 m and the total spread of results varies between 0.001 m and 0.166 m;
- -
- The mean value of is equal to 0.039 m and the total spread of results ranges from 0.002 m to 0.264 m;
- -
- The mean value of is equal to 0.072 m and the total spread of results ranges from 0.038 m to 0.186 m.
- -
- the parameter values from the weighted mean model improved by 45% relative to the results from the arithmetic mean model,
- -
- the parameter values from the weighted mean model improved by 46% relative to the results from the arithmetic mean model,
- -
- the parameter values from the weighted mean model improved by 46% relative to the results from the arithmetic mean model,
- -
- the parameter values from the weighted mean model improved by 86% relative to the results from the arithmetic mean model,
- -
- the parameter values from the weighted mean model improved by 87% relative to the results from the arithmetic mean model,
- -
- the parameter values from the weighted mean model improved by 88% relative to the results from the arithmetic mean model.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Krasuski, K. Application the GPS Code Observations in BSSD Method for Recovery the Position of the Aircraft. J. Autom. Mob. Robot. Intell. Syst. 2017, 11, 45–52. [Google Scholar] [CrossRef]
- Kaplan, E.D.; Hegarty, J. Understanding GPS: Principles and Applications, 2nd ed.; Artech House: London, UK, 2006; ISBN 978-1580538947. [Google Scholar]
- Krasuski, K.; Ćwiklak, J. Application of GPS Sensor for Recovery of Precise Position of Aircraft in Air Transport. In Proceedings of the 16th International Scientific Conference Engineering for Rural Development, Jelgava, Latvia, 24–26 May 2017; pp. 222–229. [Google Scholar]
- Monico, J.F.G.; Marques, H.A.; Tsuchya, I.; Oyama, R.T.; Queiroz, W.R.S.; Souza, M.C.; Wentz, J.P. Real Time PPP Applied to Airplane Fligtht Tests. Bull. Geod. Sci. 2019, 25. [Google Scholar] [CrossRef] [Green Version]
- Specht, C.; Pawelski, J.; Smolarek, L.; Specht, M.; Dabrowski, P. Assessment of the Positioning Accuracy of DGPS and EGNOS Systems in the Bay of Gdansk using Maritime Dynamic Measurements. J. Navig. 2019, 72, 575–587. [Google Scholar] [CrossRef] [Green Version]
- Ueno, M.; Nimura, T.; Fujiwara, T.; Nonaka, K. Evaluation of RTK-OTF Positioning System for Free Running Manoeuvrability Test of a Model Ship. In Proceedings of the Oceans ‘97. MTS/IEEE Conference Proceedings, Halifax, Canada, 6–9 October 1997; Volume 2, pp. 1120–1125. [Google Scholar]
- Gao, Y.; Wang, M. Real-Time Kinematic OTF Positioning Using a Single GPS Receiver. In Observing our Changing Earth. International Association of Geodesy Symposia Sideris; Sideris, M., Ed.; Springer: Berlin/Heidelberg, Germany, 2009; Volume 133. [Google Scholar]
- Langley, R.B. RTK GPS, GPS WORLD. 1998, pp. 70–76. Available online: http://www2.unb.ca/gge/Resources/gpsworld.september98.pdf (accessed on 30 October 2021).
- Krasuski, K.; Ćwiklak, J.; Cur, K. Determination of The Precise Trajectory of an Aircraft Flight in Aviation Experiments in Poland. In Contemporary Navigation, 1st ed.; Ćwiklak, J., Ed.; Publisher of Military University of Aviation: Dęblin, Poland, 2019; pp. 87–97. [Google Scholar]
- Próchniewicz, D.; Walo, J. Quality Indicator for Ionospheric Biases Interpolation in the Network RTK. Rep. Geod. 2012, 92, 7–21. [Google Scholar]
- Grzegorzewski, M.; Jaruszewski, W.; Fellner, A.; Oszczak, S.; Wasilewski, A.; Rzepecka, Z.; Kapcia, J.; Popławski, T. Preliminary Results of DGPS/DGLONASS Aircraft Positioning in Flight Approaches and Landings. Ann. Navig. 1999, 1, 41–53. [Google Scholar]
- Hayward, R.; Marchick, A.; Powell, J.D. Two Antenna GPS Attitude and Integer Ambiguity Resolution for Aircraft Applications. In Proceedings of the 1999 National Technical Meeting of The Institute of Navigation, San Diego, Canada, 25–27 January 1999; pp. 155–164. [Google Scholar]
- Pervan, B.; Chan, F.C. System Concepts for Cycle Ambiguity Resolution and Verification for Aircraft Carrier Landings. In Proceedings of the 14th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2001), Salt Lake City, UT, USA, 11–14 September 2001; pp. 1228–1237. [Google Scholar]
- Boon, F.J.G.; de Jonge, P.J.; Tiberius, C.C.J.M. Precise aircraft positioning by fast ambiguity resolution using improved troposphere modeling. In Proceedings of the 10th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1997), Kansas City, MO, USA, 16–19 September 1997; pp. 1877–1884. [Google Scholar]
- Blomenhofer, H.; Hein, G.W.; Walsh, D. On-The-Fly Carrier Phase Ambiguity Resolution for Precise Aircraft Landing. In Proceedings of the 6th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1993), Salt Lake City, UT, USA, 22–24 September 1993; pp. 821–830. [Google Scholar]
- Shi, J.; Cannon, M.E. High Accuracy Airborne GPS Positioning: Testing, Data Processing and Results. In Proceedings of the 1994 IEEE Position, Location and Navigation Symposium—PLANS’94, Las Vegas, NV, USA, 11–15 April 1994; pp. 547–554. [Google Scholar]
- Boon, F.; Ambrosius, B. Results of Real-time Applications of The LAMBDA Method in GPS Based Aircraft Landings. In Proceedings of the KIS97, The University of Calgary, Banff, Canada, 3–6 June 1997; pp. 339–345. [Google Scholar]
- Waters, J.; Sousa, P.; Wellons, L.; Colby, G.; Weir, J. Test Results of an F/A-18 Automatic Carrier Landing Using Shipboard Relative GPS. In Proceedings of the 57th Annual Meeting of The Institute of Navigation (2001), Albuquerque, NM, USA, 11–13 June 2001; pp. 841–851. [Google Scholar]
- Pervan, B.; Chan, F.C.; Gebre-Egziabher, D.; Pullen, S.; Enge, P.; Colby, G. Performance Analysis of Carrier-Phase DGPS Navigation for Shipboard Landing of Aircraft. Navig. J. Inst. Navig. 2003, 50, 181–191. [Google Scholar] [CrossRef]
- Tsujii, T.; Harigae, M.; Inagaki, T.; Kanai, T. Flight Tests of GPS/GLONASS Precise Positioning Versus Dual Frequency KGPS Profile. Earth Planet Space. 2000, 52, 825–829. [Google Scholar] [CrossRef] [Green Version]
- Tsai, V.J.; Kao, J.S.; Chen, C.N. On GPS and GPS-RTK Assisted Aerotriangulation. In Proceedings of the ASPRS 2006 Annual Conference, Reno, NV, USA, 1–5 May 2006; pp. 1–10. [Google Scholar]
- Collins, J.P.; Langley, R.B. Estimating the Residual Tropospheric Delay for Airborne Differential GPS Positioning (A Summary). In Advances in Positioning and Reference Frames. International Association of Geodesy Symposia; Springer: Berlin/Heidelberg, Germany, 1998; Volume 118. [Google Scholar]
- Tsujii, T. Precise Determination of Aircraft Position and Attitude Using GPS Carrier Phase Measurement. Ph.D. Thesis, Kyoto University, Kyoto, Japan, 1998; p. 131. [Google Scholar]
- van Graas, F.; Braasch, M. GPS Interferometric attitude and heading determination: Initial flight test results. Navig. J. Inst. Navig. 1991, 38, 297–316. [Google Scholar] [CrossRef] [Green Version]
- Hu, G.; Ovstedal, O.; Featherstone, W.; Castleden, J.; Earls, C.; Abbey, D. Using the virtual reference stations (VRS) concept for long-range airborne GPS kinematic positioning. Surv. Rev. 2008, 40, 83–91. [Google Scholar] [CrossRef] [Green Version]
- Schielin, E.; Dautermann, T. GNSS-based relative navigation for intentional approximation of aircraft. Aviation 2015, 19, 40–48. [Google Scholar] [CrossRef] [Green Version]
- Xincun, Y.; Yongzhong, O.; Yi, S.; Kailiang, D. Application of precise point positioning technology in airborne gravity measurement. Geod. Geodyn. 2014, 5, 68–72. [Google Scholar] [CrossRef] [Green Version]
- Sharma, R.K.; Hablani, H.K. High-Accuracy GPS-Based Aircraft Navigation for Landing using Pseudolites and Double-Difference Carrier Phase Measurements. IFAC Proc. Vol. 2014, 47, 200–204. [Google Scholar] [CrossRef]
- Grzegorzewski, M. Navigating an aircraft by means of a position potential in three dimensional space. Ann. Navig. 2005, 9, 111. [Google Scholar]
- Krasuski, K.; Ćwiklak, J. Accuracy analysis of aircraft position at departure phase using DGPS method. Acta Mech. Autom. 2020, 14, 36–43. [Google Scholar] [CrossRef]
- Krasuski, K.; Ćwiklak, J. Aircraft positioning using DGNSS technique for GPS and GLONASS data. Sens. Rev. 2020, 40, 559–575. [Google Scholar] [CrossRef]
- Krasuski, K.; Ciećko, A.; Bakuła, M.; Wierzbicki, D. New Strategy for Improving the Accuracy of Aircraft Positioning Based on GPS SPP Solution. Sensors 2020, 20, 4921. [Google Scholar] [CrossRef]
- Grzegorzewski, M.; Ciećko, A.; Oszczak, S.; Popielarczyk, D. Autonomous and EGNOS Positioning Accuracy Determination of Cessna Aircraft on the Edge of EGNOS Coverage. In Proceedings of the 2008 National Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 28–30 January 2008; pp. 407–410. [Google Scholar]
- Krasuski, K.; Kobialka, E.; Grzegorzewski, M. Research of Accuracy of the Aircraft Position Using the GPS and EGNOS Systems in Air Transport. Commun. Sci. Lett. Univ. Zilina 2019, 21, 27–34. [Google Scholar] [CrossRef]
- Ćwiklak, J.; Grzegorzewski, M.; Krasuski, K. Influence of the Ionospheric Delay on Designation of an Aircraft Position. Commun.—Sci. Lett. Univ. Zilina 2020, 22, 3–10. [Google Scholar] [CrossRef]
- Ciećko, A.; Grzegorzewski, M.; Ćwiklak, J.; Oszczak, S.; Jafernik, H. Air navigation in eastern Poland based on EGNOS. In Proceedings of the Aviation Technology, Integration, and Operations Conference (ATIO 2013), Los Angeles, CA, USA, 12–14 August 2013; Red Hook: Curran, NY, USA, 2013; Volume 1, pp. 603–613, ISBN 978-1-62993-206-4. [Google Scholar]
- Ciećko, A.; Grunwald, G. Examination of Autonomous GPS and GPS/EGNOS Integrity and Accuracy for Aeronautical Applications. Period. Polytech. Civ. Eng. 2017, 61, 920–928. [Google Scholar] [CrossRef]
- Krasuski, K.; Wierzbicki, D. New Methodology for Computing the Aircraft’s Position Based on the PPP Method in GPS and GLONASS Systems. Energies 2021, 14, 2525. [Google Scholar] [CrossRef]
- Krasuski, K.; Wierzbicki, D.; Jafernik, H. Utilization PPP method in aircraft positioning in post-processing mode. Aircr. Eng. Aerosp. Tech. 2018, 90, 202–209. [Google Scholar] [CrossRef]
- Krasuski, K.; Ciećko, A.; Grunwald, G.; Wierzbicki, D. Assessment of velocity accuracy of aircraft in the dynamic tests using GNSS sensors. Facta Univ. Ser. Mech. Eng. 2020, 18, 18–301. [Google Scholar] [CrossRef]
- Krasuski, K.; Ćwiklak, J.; Jafernik, H. Verification of the precise position of the aircraft in air navigation based on the solution of the RTK-OTF technique. J. KONES Powertrain Transp. 2017, 24, 117–124. [Google Scholar]
- Ćwiklak, J.; Kozuba, J.; Krasuski, K.; Jafernik, H. The assessment of aircraft positioning accuracy using GPS data in RTK-OTF technique. In Proceedings of the 18th International Multidisciplinary Scientific GeoConference SGEM 2018, Sofia, Bulgaria, 2–8 July 2018; pp. 459–466, ISBN 978-619-7408-40-9. [Google Scholar] [CrossRef]
- Lim, C.; Yoon, H.; Cho, A.; Yoo, C.-S.; Park, B. Dynamic Performance Evaluation of Various GNSS Receivers and Positioning Modes with Only One Flight Test. Electronics 2019, 8, 1518. [Google Scholar] [CrossRef] [Green Version]
- Talaya López, J. Algorithms and Methods for Robust Geodetic kinematic Positioning. Ph.D. Thesis, Universitat Politècnica de Catalunya, Barcelona, Spain, 2003; p. 139. [Google Scholar]
- Al-Shaery, A.; Zhang, S.; Rizos, C. An enhanced calibration method of GLONASS inter-channel bias for GNSS RTK. GPS Solut. 2013, 17, 165–173. [Google Scholar] [CrossRef]
- Mona, S. El-Sayed. Study the Behavior of Total Least Squares Technique in Adjusting GPS Field Data—A Case Study. Am. J. Geogr. Inf. Syst. 2019, 8, 55–59. [Google Scholar] [CrossRef]
- Krasuski, K.; Savchuk, S. Accuracy Assessment of Aircraft Positioning Using the Dual-Frequency GPS Code Observations in Aviation. Commun.—Sci. Lett. Univ. Zilina 2020, 22, 23–30. [Google Scholar] [CrossRef] [Green Version]
- Krasuski, K.; Wierzbicki, D. Application of the SBAS/EGNOS Corrections in UAV Positioning. Energies 2021, 14, 739. [Google Scholar] [CrossRef]
- Krasuski, K.; Wierzbicki, D.; Bakuła, M. Improvement of UAV Positioning Performance Based on EGNOS+SDCM Solution. Remote Sens. 2021, 13, 2597. [Google Scholar] [CrossRef]
- Liu, L.; Wen, H.; Liu, B. Comparison of models for GPS kinematic data processing. Geo-Spat. Inf. Sci. 2008, 11, 152–156. [Google Scholar] [CrossRef]
- ASG-EUPOS. Available online: http://www.asgeupos.pl/index.php?wpg_type=serv&sub=pozgeo (accessed on 30 October 2021).
- Specht, C.; Mania, M.; Skóra, M.; Specht, M. Accuracy of the GPS positioning system in the context of increasing the number of satellites in the constellation. Pol. Marit. Res. 2015, 22, 9–14. [Google Scholar] [CrossRef] [Green Version]
- CODE ftp Server. Available online: http://ftp.aiub.unibe.ch/CODE (accessed on 30 October 2021).
- Scilab. Available online: https://www.scilab.org/ (accessed on 30 October 2021).
- Osada, E. Geodesy; Oficyna Wydawnicza Politechniki Wroclawskiej: Wroclaw, Poland, 2001; Volume 92, pp. 236–241. ISBN 83-7085-663-2. (In Polish) [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Papers from Scientific Knowledge Analysis | Obtained Accuracy | Conclusion |
|---|---|---|
| [11,20,22,23,25,29,33,34,36,41,42] | Less than 0.1 m | Concerns mainly the vertical component |
| [14,15,16,20,22,23,25,28,29,33,34,36,41,42] | Higher than 0.1 m | Concerns mainly the horizontal components or all 3 components (Latitude, Longitude, ellipsoidal height) |
| Measurement Weight | ||
|---|---|---|
| 0.001 to 0.077 | 1.635 | |
| 0.002 to 1.291 | 1.635 |
| Model | |||
|---|---|---|---|
| Weighted mean model | 0.028 | 0.021 | 0.039 |
| Weighted mean model | 0.007 | 0.005 | 0.009 |
| Arithmetic mean model | 0.051 | 0.039 | 0.072 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krasuski, K.; Ciećko, A.; Bakuła, M.; Grunwald, G.; Wierzbicki, D. New Methodology of Designation the Precise Aircraft Position Based on the RTK GPS Solution. Sensors 2022, 22, 21. https://doi.org/10.3390/s22010021
Krasuski K, Ciećko A, Bakuła M, Grunwald G, Wierzbicki D. New Methodology of Designation the Precise Aircraft Position Based on the RTK GPS Solution. Sensors. 2022; 22(1):21. https://doi.org/10.3390/s22010021
Chicago/Turabian StyleKrasuski, Kamil, Adam Ciećko, Mieczysław Bakuła, Grzegorz Grunwald, and Damian Wierzbicki. 2022. "New Methodology of Designation the Precise Aircraft Position Based on the RTK GPS Solution" Sensors 22, no. 1: 21. https://doi.org/10.3390/s22010021
APA StyleKrasuski, K., Ciećko, A., Bakuła, M., Grunwald, G., & Wierzbicki, D. (2022). New Methodology of Designation the Precise Aircraft Position Based on the RTK GPS Solution. Sensors, 22(1), 21. https://doi.org/10.3390/s22010021