
Validation and Improvement of COCTS/HY-1C Sea Surface Temperature Products


Abstract
:1. Introduction
2. Data
2.1. Measured SST Data in NEAR-GOOS Database
2.2. HY-1C Satellite Products
3. Experimental Methods
3.1. Establishing Blackbody Radiation Lookup Table in Thermal Infrared Band of HY-1C
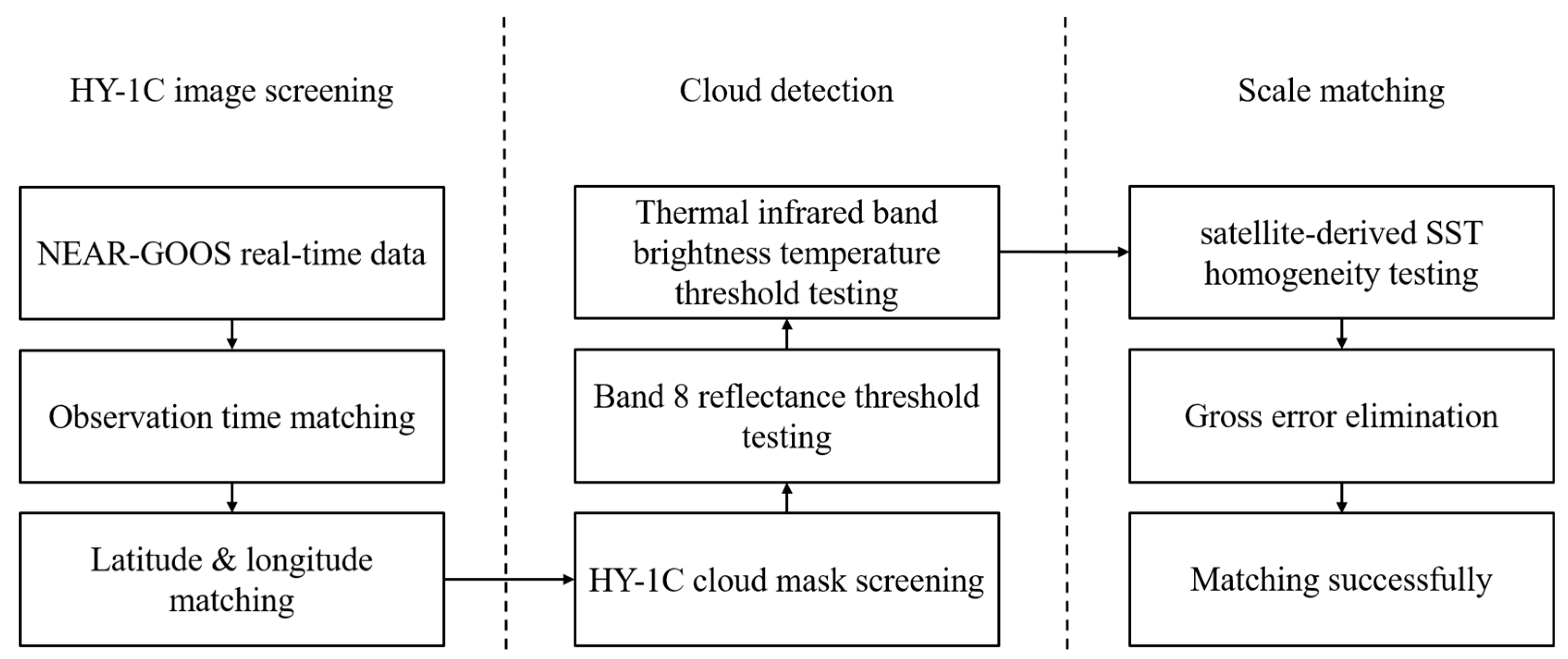
3.2. Data Matching
3.3. Improvement for HY-1C SST Products
3.4. Accuracy Evaluation Method
4. Results
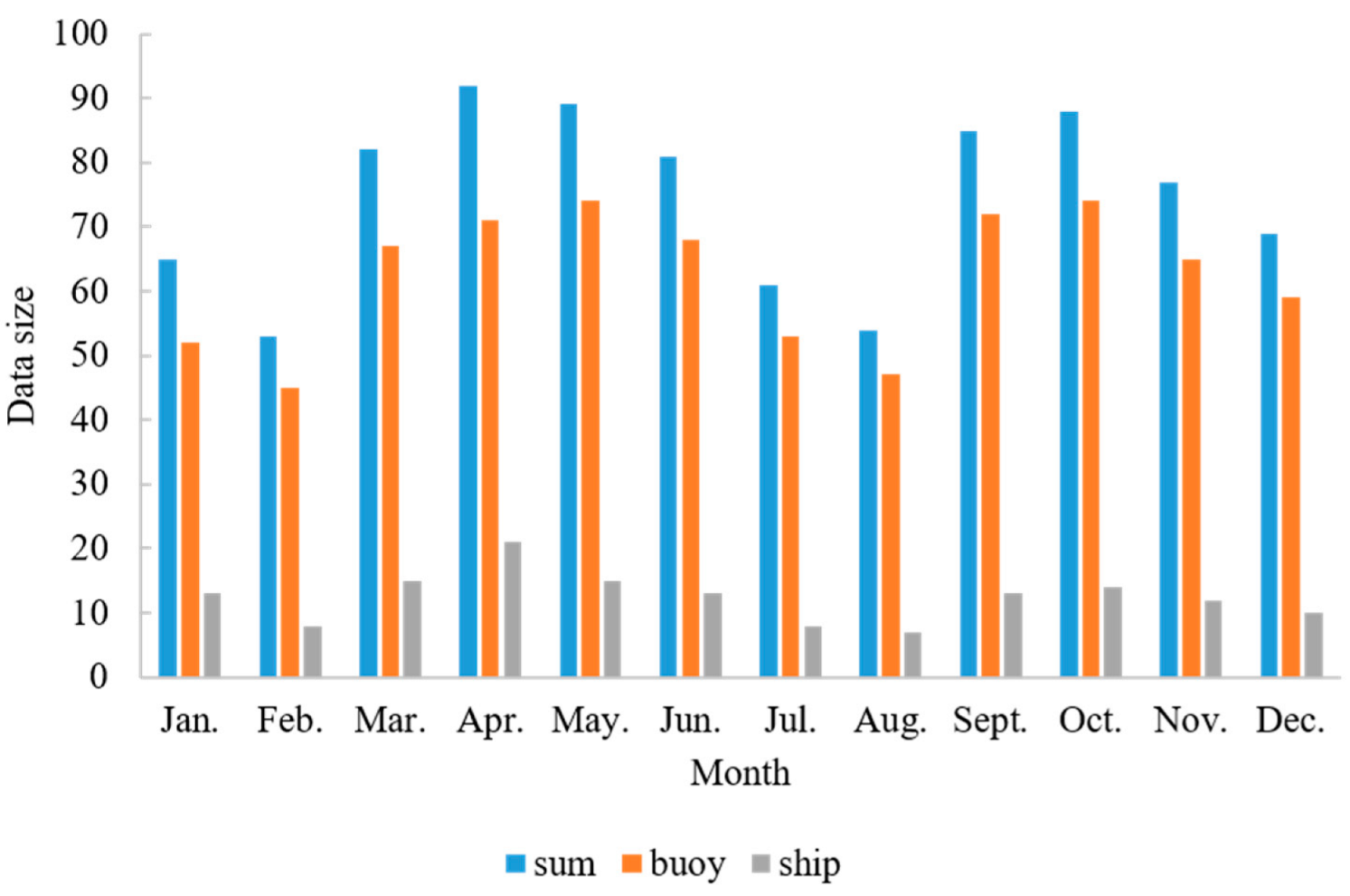
4.1. Data Matching Results and Analysis
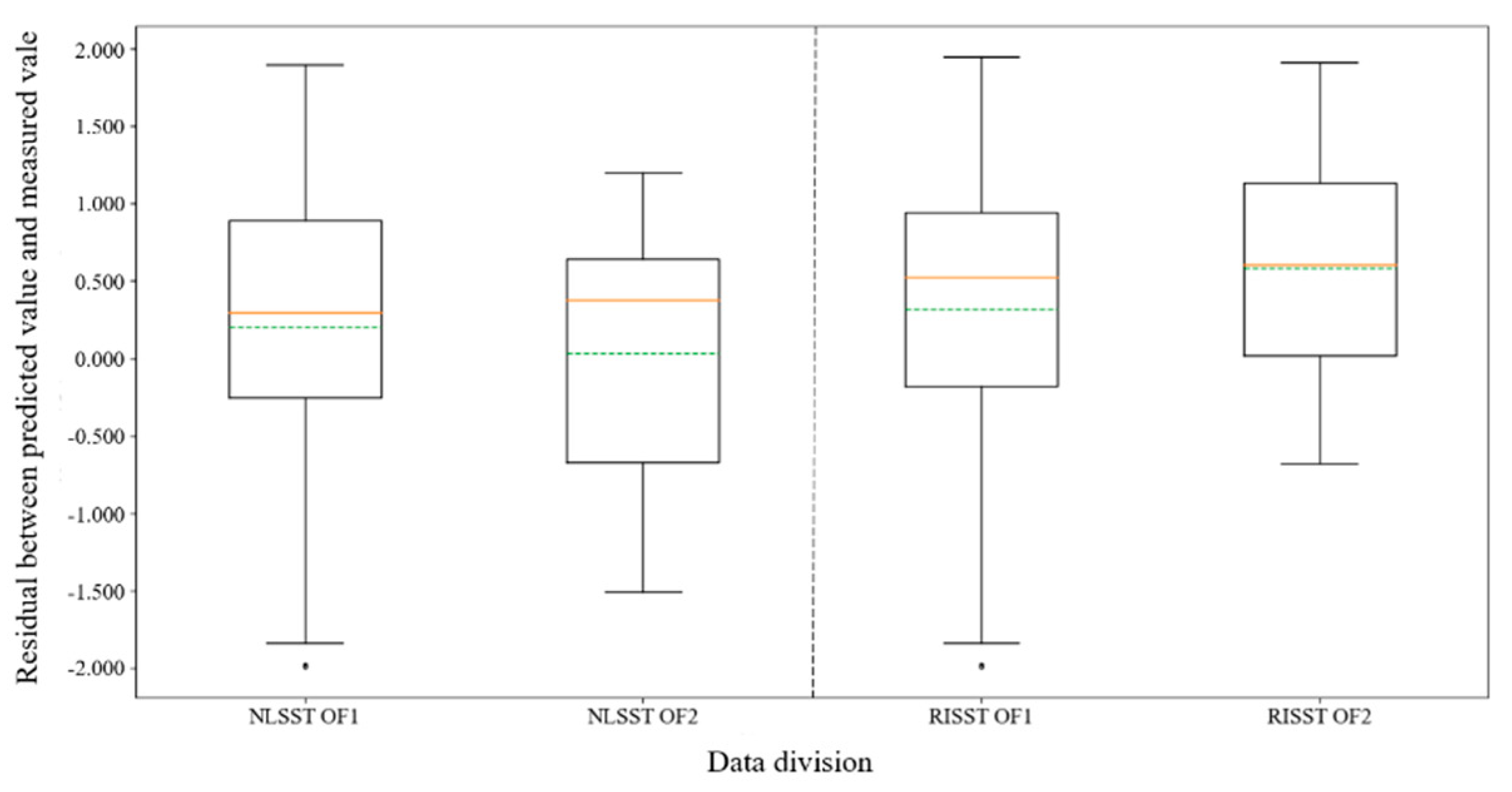
4.2. SST Retrieval Results and Analysis
5. Discussion
5.1. Research on Model Generalization Ability
5.2. Analysis concerning Data Acquisition Method and Research Time
5.3. Limitations and Future Work
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Reynolds, R.W.; Smith, T.M. Improved Global Sea Surface Temperature Analyses Using Optimum Interpolation. J. Clim. 1994, 7, 929–948. [Google Scholar] [CrossRef] [Green Version]
- Reynolds, R.W.; Rayner, N.A.; Smith, T.M.; Stokes, D.C.; Wang, W. An Improved In Situ and Satellite SST Analysis for Climate. J. Clim. 2002, 15, 1609–1625. [Google Scholar] [CrossRef]
- Schlax, M.G.; Casey, K.S.; Chelton, D.B.; Liu, C.; Smith, T.M.; Reynolds, R.W. Daily High-Resolution-Blended Analyses for Sea Surface Temperature. J. Clim. 2007, 20, 5473–5496. [Google Scholar]
- McClain, E.P.; Pichel, W.G.; Walton, C.C. Comparative performance of AVHRR-based multichannel sea surface temperatures. J. Geophys. Res. 1985, 90, 11587–11601. [Google Scholar] [CrossRef]
- Burns, S.P.; Khelif, D.; Friehe, C.A.; Hignett, P.; Williams, A.G.; Grant, A.L.; Hacker, J.M.; Hagan, D.E.; Serra, Y.L.; Rogers, D.P. Comparisons of aircraft, ship, and buoy radiation and SST measurements from TOGA COARE. J. Geophys. Res. Atmos. 2000, 105, 15627–15652. [Google Scholar] [CrossRef]
- Ullman, D.S.; Cornillon, P.C. Evaluation of front detection methods for satellite-derived SST data using in situ observations. J. Atmos. Ocean. Technol. 2000, 17, 1667–1675. [Google Scholar] [CrossRef]
- Guan, L.; Kawamura, H. SST availabilities of satellite infrared and microwave measurements. J. Oceanogr. 2003, 59, 201–209. [Google Scholar] [CrossRef]
- Du, K.; Chen, S.; Ding, J.; Lee, Z. Preliminary Evaluation of the Atmospheric Correction Look-Up-Tables (LUTs) of the COCTS-HY1C. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 4–8 May 2020; p. 21206. [Google Scholar]
- Kuenzer, C.; Dech, S. Thermal infrared remote sensing. Remote Sens. Digit. Image Process. 2013, 10, 978–994. [Google Scholar]
- Merchant, C.J. Thermal remote sensing of sea surface temperature. In Thermal Infrared Remote Sensing; Springer: Berlin/Heidelberg, Germany, 2013; pp. 287–313. [Google Scholar]
- Hosoda, K.; Qin, H. Algorithm for estimating sea surface temperatures based on Aqua/MODIS global ocean data. 1. Development and validation of the algorithm. J. Oceanogr. 2011, 67, 135–145. [Google Scholar] [CrossRef]
- Walton, C.C. Nonlinear Multichannel Algorithms for Estimating Sea Surface Temperature with AVHRR Satellite Data. J. Appl. Meteorol. 1988, 27, 115–124. [Google Scholar] [CrossRef] [Green Version]
- Emery, W.J.; Yu, Y.; Wick, G.A.; Schluessel, P.; Reynolds, R.W. Correcting infrared satellite estimates of sea surface temperature for atmospheric water vapor attenuation. J. Geophys. Res. 1994, 99, 5219–5236. [Google Scholar] [CrossRef]
- Walton, C.C.; Pichel, W.G.; Sapper, J.F.; May, D.A. The development and operational application of nonlinear algorithms for the measurement of sea surface temperatures with the NOAA polar-orbiting environmental satellites. J. Geophys. Res. Ocean 1998, 103, 27999–28012. [Google Scholar] [CrossRef]
- Kilpatrick, K.A.; Podesta, G.P.; Walsh, S.; Williams, E.; Halliwell, V.; Szczodrak, M.; Brown, O.B.; Minnett, P.J.; Evans, R.H. A decade of sea surface temperature from MODIS. Remote Sens. Environ. 2015, 165, 27–41. [Google Scholar] [CrossRef]
- Kilpatrick, K.A.; Podestá, G.P.; Evans, R. Overview of the NOAA/NASA advanced very high resolution radiometer Pathfinder algorithm for sea surface temperature and associated matchup database. J. Geophys. Res. Ocean 2001, 106, 9179–9197. [Google Scholar] [CrossRef]
- Minnett, P.J.; Evans, R.H.; Podestá, G.P.; Kilpatrick, K.A. Sea-surface temperature from Suomi-NPP VIIRS: Algorithm development and uncertainty estimation. Proc. SPIE 2014, 9111, 87–94. [Google Scholar]
- Lee, D.-Y.; Taira, K. Development of North-East Asian Regional Global Ocean Observing System (NEAR-GOOS); Elsevier Oceanography Series; Elsevier: Amsterdam, The Netherlands, 1997; Volume 62, pp. 587–595. [Google Scholar]
- Merchant, C.J.; Harris, A.R. Toward the elimination of bias in satellite retrievals of sea surface temperature: 2. Comparison with in situ measurements. J. Geophys. Res. 1999, 104, 23579–23590. [Google Scholar] [CrossRef] [Green Version]
- François, C.; Brisson, A.; Le Borgne, P.; Marsouin, A. Definition of a radiosounding database for sea surface brightness temperature simulations: Application to sea surface temperature retrieval algorithm determination. Remote Sens. Environ. 2002, 81, 309–326. [Google Scholar] [CrossRef]
- Donlon, C.J.; Martin, M.; Stark, J.; Roberts-Jones, J.; Fiedler, E.; Wimmer, W. The operational sea surface temperature and sea ice analysis (OSTIA) system. Remote Sens. Environ. 2012, 116, 140–158. [Google Scholar] [CrossRef]
- Liang, X.; Ignatov, A. AVHRR, MODIS, and VIIRS radiometric stability and consistency in SST bands. J. Geophys. Res. Ocean 2013, 118, 3161–3171. [Google Scholar] [CrossRef]
- Corlett, G.K.; Merchant, C.J.; Minnett, P.J.; Donlon, C.J. Assessment of Long-Term Satellite Derived Sea Surface Temperature Records. In Optical Radiometry for Ocean Climate Measurements; Experimental Methods in the Physical Sciences; Academic Press: Cambridge, MA, USA, 2014; pp. 639–677. [Google Scholar]
- Yang, J.; Wen, J.; Wang, Y.; Jiang, B.; Wang, H.; Song, H. Fog-Based Marine Environmental Information Monitoring toward Ocean of Things. IEEE Internet Things J. 2020, 7, 4238–4247. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band Number | Band /μm | Measurement Condition /mW·cm−2·sr−1·μm−1 | Signal to Noise Ratio /SNR | Maximum Radiance /mW·cm−2·sr−1·μm−1 |
|---|---|---|---|---|
| 1 | 0.402–0.422 | 9.100 | 349 | 13.940 |
| 2 | 0.433–0.453 | 8.410 | 472 | 14.490 |
| 3 | 0.480–0.500 | 6.560 | 467 | 14.590 |
| 4 | 0.510–0.530 | 5.460 | 448 | 13.860 |
| 5 | 0.555–0.575 | 4.570 | 417 | 13.890 |
| 6 | 0.660–0.680 | 2.460 | 309 | 11.950 |
| 7 | 0.730–0.770 | 1.610 | 319 | 9.720/5.000 |
| 8 | 0.845–0.885 | 1.090 | 327 | 6.930/3.500 |
| 9 | 10.300–11.300 | 0.200 K (300 K, NEΔT) | 320 K (Maximum brightness temperature) | |
| 10 | 11.500–12.500 | 0.200 K (300 K, NEΔT) | 320 K (Maximum brightness temperature) | |
| Algorithm | Mean | Median | SD | RSD |
|---|---|---|---|---|
| MCSST | 0.019 | −0.145 | 1.057 | 1.158 |
| eNLSST | 0.206 | 0.300 | 0.917 | 0.824 |
| RISST * | 0.321 | 0.525 | 0.908 | 0.810 |
| Group | eNLSST | RISST | ||||||
|---|---|---|---|---|---|---|---|---|
| Mean | Median | SD | RSD | Mean | Median | SD | RSD | |
| OF1 | 0.206 | 0.300 | 0.917 | 0.824 | 0.321 | 0.525 | 0.908 | 0.810 |
| OF2 | 0.031 | 0.380 | 0.884 | 0.945 | 0.587 | 0.605 | 0.857 | 0.804 |
| Group | eNLSST | RISST | ||||||
|---|---|---|---|---|---|---|---|---|
| Mean | Median | SD | RSD | Mean | Median | SD | RSD | |
| OF1 | 0.206 | 0.300 | 0.917 | 0.824 | 0.321 | 0.525 | 0.908 | 0.810 |
| B1 | 0.213 | 0.325 | 0.904 | 0.790 | 0.319 | 0.530 | 0.904 | 0.794 |
| B2 | 0.136 | 0.055 | 1.035 | 1.189 | 0.332 | 0.360 | 0.933 | 1.111 |
| Group | eNLSST | RISST | ||||||
|---|---|---|---|---|---|---|---|---|
| Mean | Median | SD | RSD | Mean | Median | SD | RSD | |
| T1 | 0.089 | 0.090 | 0.895 | 0.747 | 0.096 | 0.100 | 0.947 | 0.786 |
| T2 | 0.327 | 0.590 | 0.924 | 0.736 | 0.456 | 0.665 | 0.856 | 0.718 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, F.; Zhang, Y.; Zhang, Z.; Ding, J. Validation and Improvement of COCTS/HY-1C Sea Surface Temperature Products. Sensors 2022, 22, 3726. https://doi.org/10.3390/s22103726
Zhang F, Zhang Y, Zhang Z, Ding J. Validation and Improvement of COCTS/HY-1C Sea Surface Temperature Products. Sensors. 2022; 22(10):3726. https://doi.org/10.3390/s22103726
Chicago/Turabian StyleZhang, Feizhou, Yulin Zhang, Zihan Zhang, and Jing Ding. 2022. "Validation and Improvement of COCTS/HY-1C Sea Surface Temperature Products" Sensors 22, no. 10: 3726. https://doi.org/10.3390/s22103726
APA StyleZhang, F., Zhang, Y., Zhang, Z., & Ding, J. (2022). Validation and Improvement of COCTS/HY-1C Sea Surface Temperature Products. Sensors, 22(10), 3726. https://doi.org/10.3390/s22103726