
Grating Interferometer with Redundant Design for Performing Wide-Range Displacement Measurements

Abstract
:1. Introduction
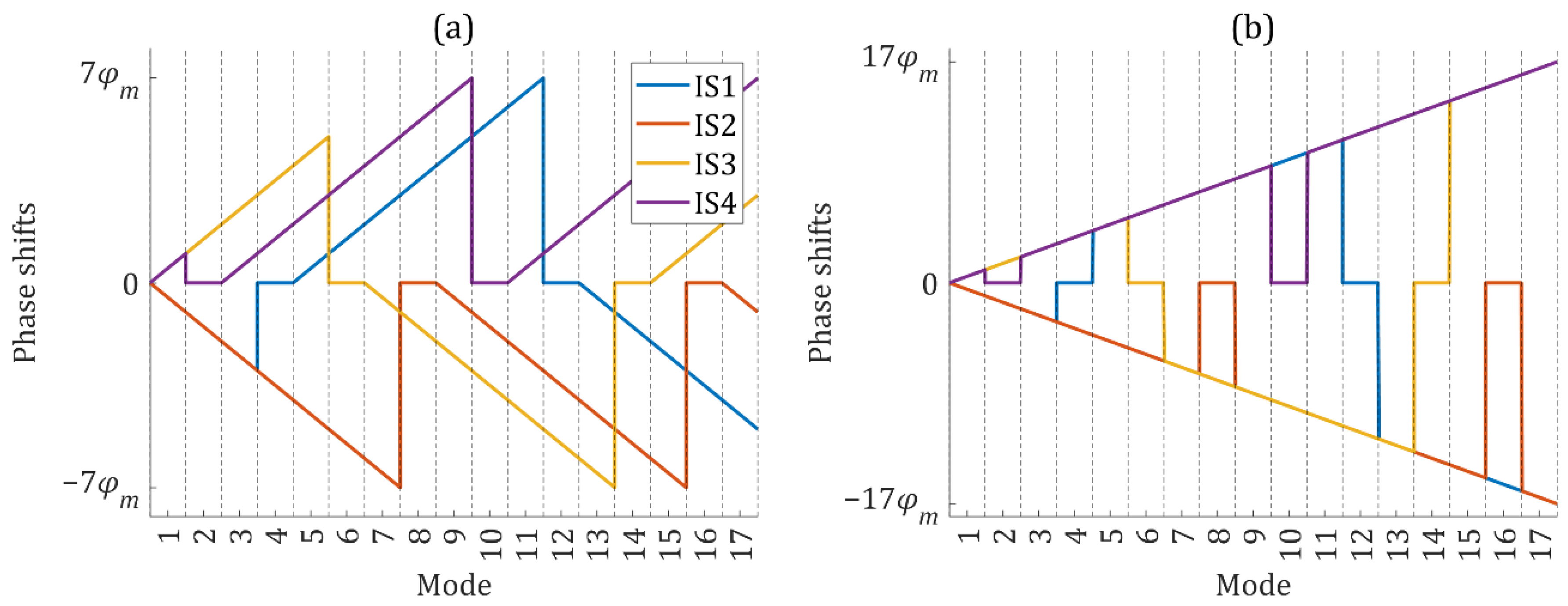
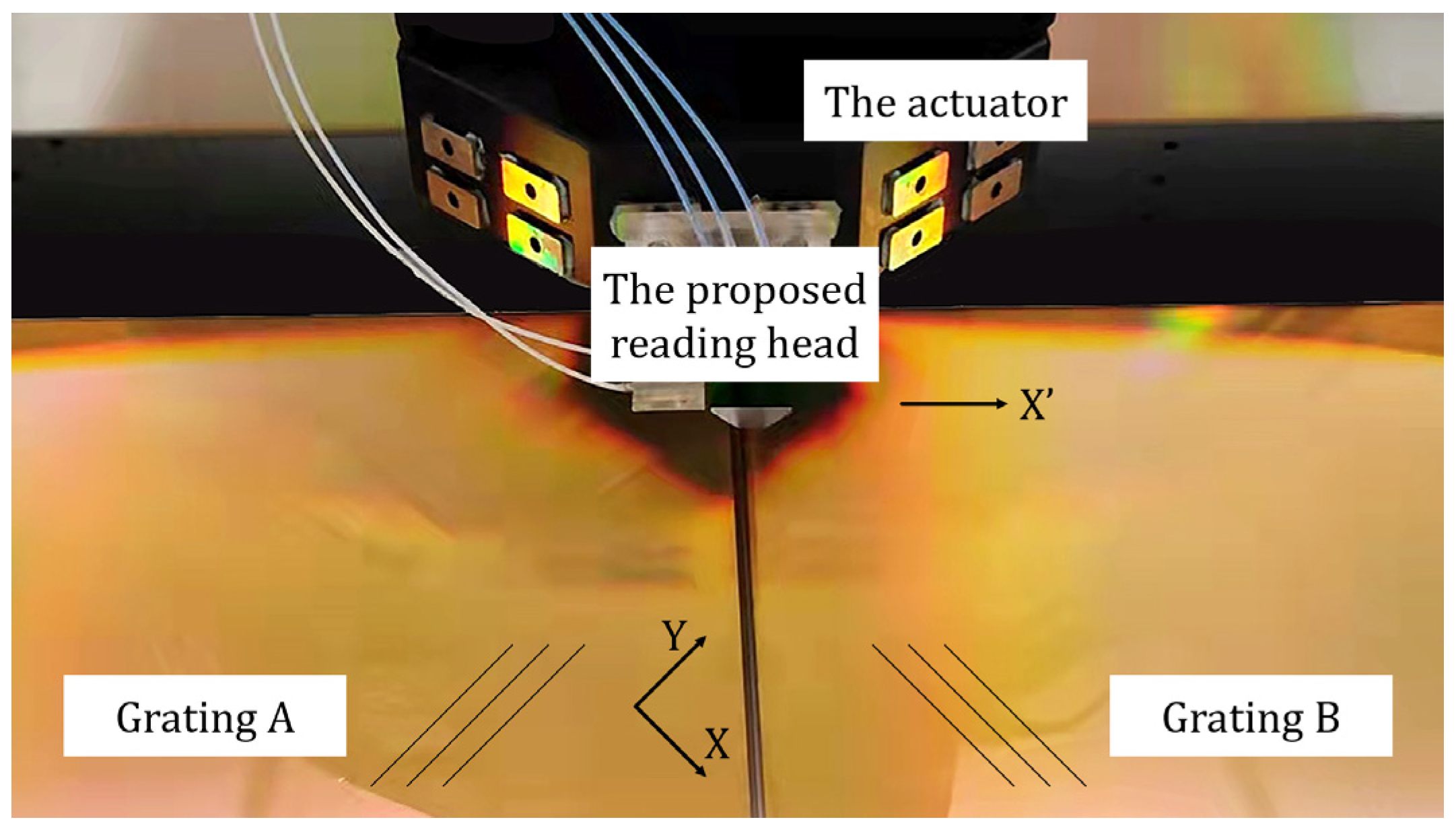
2. Interferometric Reading Head with Redundant Design
3. Grating Interferometer System for Wide Range of 6-DOF Displacement Measurements
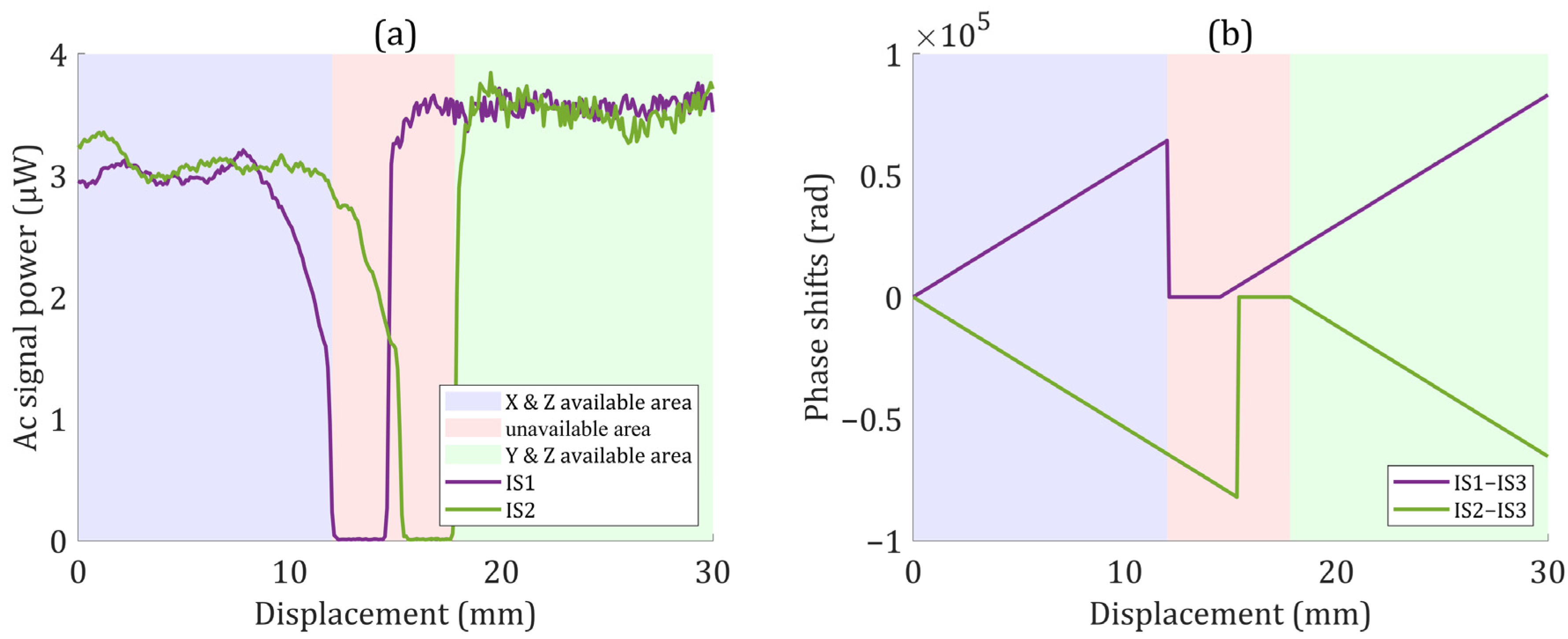
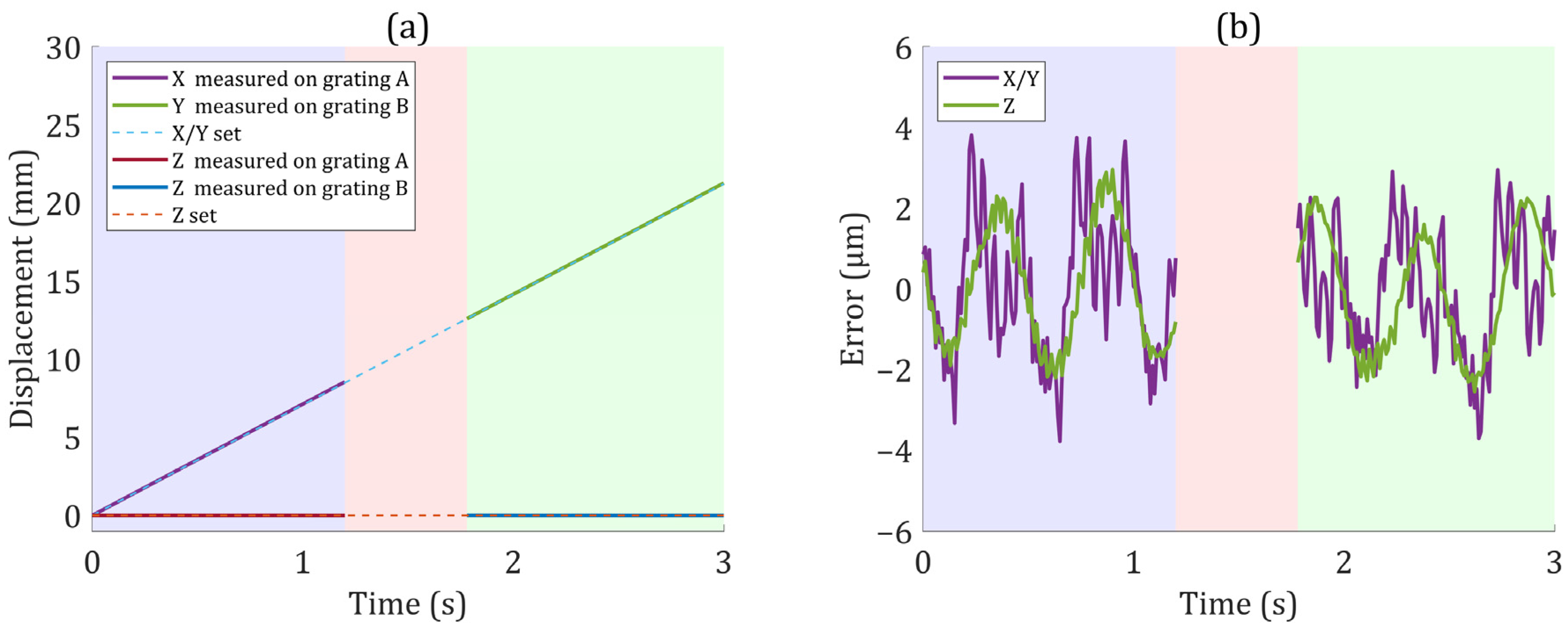
4. Experiments
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, X.; Shimizu, Y.; Ito, T.; Cai, Y.; Ito, S.; Gao, W. Measurement of six-degree-of-freedom planar motions by using a multiprobe surface encoder. Opt. Eng. 2014, 53, 122405. [Google Scholar] [CrossRef]
- de Jong, F.; van der Pasch, B.; Castenmiller, T.; Vleeming, B.; Droste, R.; van de Mast, F. Enabling the lithography roadmap: An immersion tool based on a novel stage positioning system. Proc. SPIE 2009, 7274, 72741S. [Google Scholar]
- Feng, C.; Zeng, L.; Wang, S. Heterodyne planar grating encoder with high alignment tolerance, especially insensitivity to grating tilts. Proc. SPIE 2013, 8759, 87593L. [Google Scholar]
- Kim, Y.S.; Hwang, Y.S.; Jung, M.R.; Yoo, J.H.; Kwon, W.T.; Ryan, K.; Park, C. Improving full-wafer on-product overlay using computationally designed process-robust and device-like metrology targets. Proc. SPIE 2015, 9424, 942414. [Google Scholar]
- Deng, J.; Yan, X.; Wei, C.; Lu, Y.; Li, M.; Xiang, X.; Jia, W.; Zhou, C. Eightfold optical encoder with high-density grating. Appl. Opt. 2018, 57, 2366–2375. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Liu, Z.; Jiang, S.; Wang, W.; Yu, H.; Jiang, Y.; Li, W. Polarization-modulated grating interferometer by conical diffraction. Opt. Express 2022, 30, 689–699. [Google Scholar] [CrossRef] [PubMed]
- Hsieh, H.; Chen, J.; Lerondel, G.; Lee, J. Two-dimensional displacement measurements by quasi-common-optical-path heterodyne grating interferometer. Opt. Express 2011, 19, 9770–9782. [Google Scholar] [CrossRef] [PubMed]
- Kimura, A.; Gao, W.; Arai, Y.; Lijiang, Z. Design and construction of a two-degree-of-freedom linear encoder for nanometric measurement of stage position and straightness. Precis. Eng. 2010, 34, 145–155. [Google Scholar] [CrossRef]
- Lv, Q.; Liu, Z.; Wang, W.; Li, X.; Li, S.; Song, Y.; Bayanheshig, H.Y.; Li, W. Simple and compact grating-based heterodyne interferometer with the Littrow configuration for high-accuracy and long-range measurement of two-dimensional displacement. Appl. Opt. 2018, 57, 9455–9463. [Google Scholar] [CrossRef] [PubMed]
- Hsieh, H.; Pan, S. Development of a grating-based interferometer for six-degree-of-freedom displacement and angle measurements. Opt. Express 2015, 23, 2451–2465. [Google Scholar] [CrossRef] [PubMed]
- Funatsu, T.; Uehara, Y.; Hikida, Y.; Hayakawa, A.; Ishiyama, S.; Hirayama, T.; Kono, H.; Shirata, Y.; Shibazaki, Y. Latest performance of ArF immersion scanner NSR-S630D for high-volume manufacturing for 7 nm node. Proc. SPIE 2015, 9426, 288–300. [Google Scholar]
- Castenmiller, T.; van de Mast, F.; de Kort, T.; van de Vin, C.; de Wit, M.; Stegen, R.; van Cleef, S. Towards ultimate optical lithography with NXT:1950i dual stage immersion platform. Proc. SPIE 2010, 7640, 76401N. [Google Scholar]
- Heilmann, R.; Chen, C.; Konkola, P.; Schattenburg, M. Dimensional metrology for nanometre-scale science and engineering: Towards sub-nanometre accurate encoders. Nanotechnology 2004, 15, S504. [Google Scholar] [CrossRef]
- Ye, W.; Zhang, M.; Zhu, Y.; Wang, L.; Hu, J.; Li, X.; Hu, C. Ultraprecision Real-Time Displacements Calculation Algorithm for the Grating Interferometer System. Sensors 2019, 19, 2409. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ye, W.; Zhang, M.; Zhu, Y.; Wang, L.; Hu, J.; Li, X.; Hu, C. Real-time displacement calculation and offline geometric calibration of the grating interferometer system for ultra-precision wafer stage measurement. Precis. Eng. 2019, 60, 413–420. [Google Scholar] [CrossRef]
- Ye, W.; Zhang, M.; Zhu, Y.; Wang, L.; Hu, J.; Li, X.; Hu, C. Translational displacement computational algorithm of the grating interferometer without geometric error for the wafer stage in a photolithography scanner. Opt. Express 2018, 26, 34734–34752. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
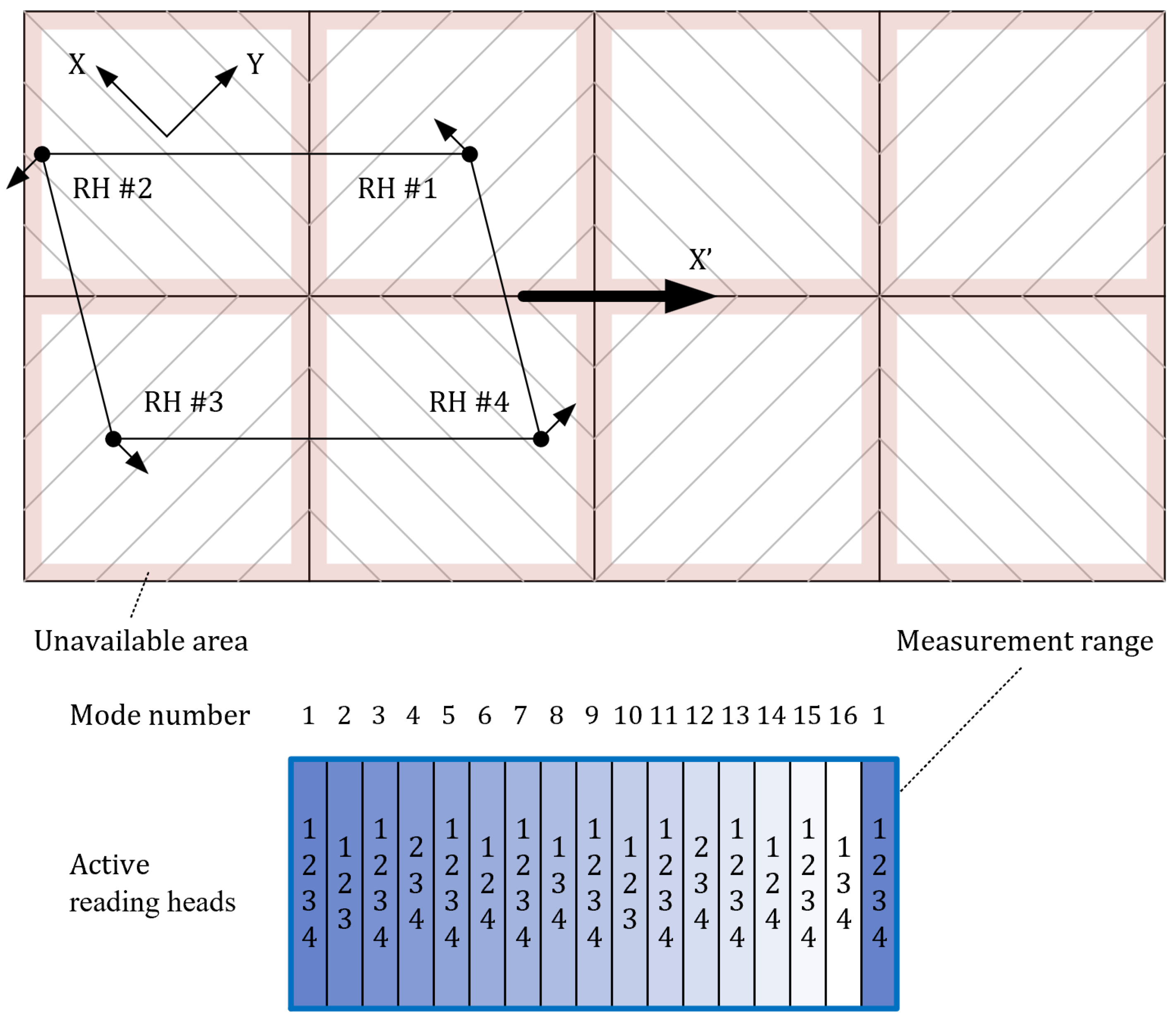
| Reading Head | Working Modes | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | |
| 1 | X | X | X | \ | Y | Y | Y | Y | Y | Y | Y | \ | X | X | X | X |
| 2 | Y | Y | Y | Y | Y | Y | Y | \ | X | X | X | X | X | X | X | \ |
| 3 | X | X | X | X | X | \ | Y | Y | Y | Y | Y | Y | Y | \ | X | X |
| 4 | Y | \ | X | X | X | X | X | X | X | \ | Y | Y | Y | Y | Y | Y |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, W.; Cheng, R.; Zhang, M.; Zhu, Y.; Wang, L.; Hu, J.; Li, X. Grating Interferometer with Redundant Design for Performing Wide-Range Displacement Measurements. Sensors 2022, 22, 3738. https://doi.org/10.3390/s22103738
Ye W, Cheng R, Zhang M, Zhu Y, Wang L, Hu J, Li X. Grating Interferometer with Redundant Design for Performing Wide-Range Displacement Measurements. Sensors. 2022; 22(10):3738. https://doi.org/10.3390/s22103738
Chicago/Turabian StyleYe, Weinan, Rong Cheng, Ming Zhang, Yu Zhu, Leijie Wang, Jinchun Hu, and Xin Li. 2022. "Grating Interferometer with Redundant Design for Performing Wide-Range Displacement Measurements" Sensors 22, no. 10: 3738. https://doi.org/10.3390/s22103738
APA StyleYe, W., Cheng, R., Zhang, M., Zhu, Y., Wang, L., Hu, J., & Li, X. (2022). Grating Interferometer with Redundant Design for Performing Wide-Range Displacement Measurements. Sensors, 22(10), 3738. https://doi.org/10.3390/s22103738