
Latent Ergonomics Maps: Real-Time Visualization of Estimated Ergonomics of Human Movements

 , , and
, , and 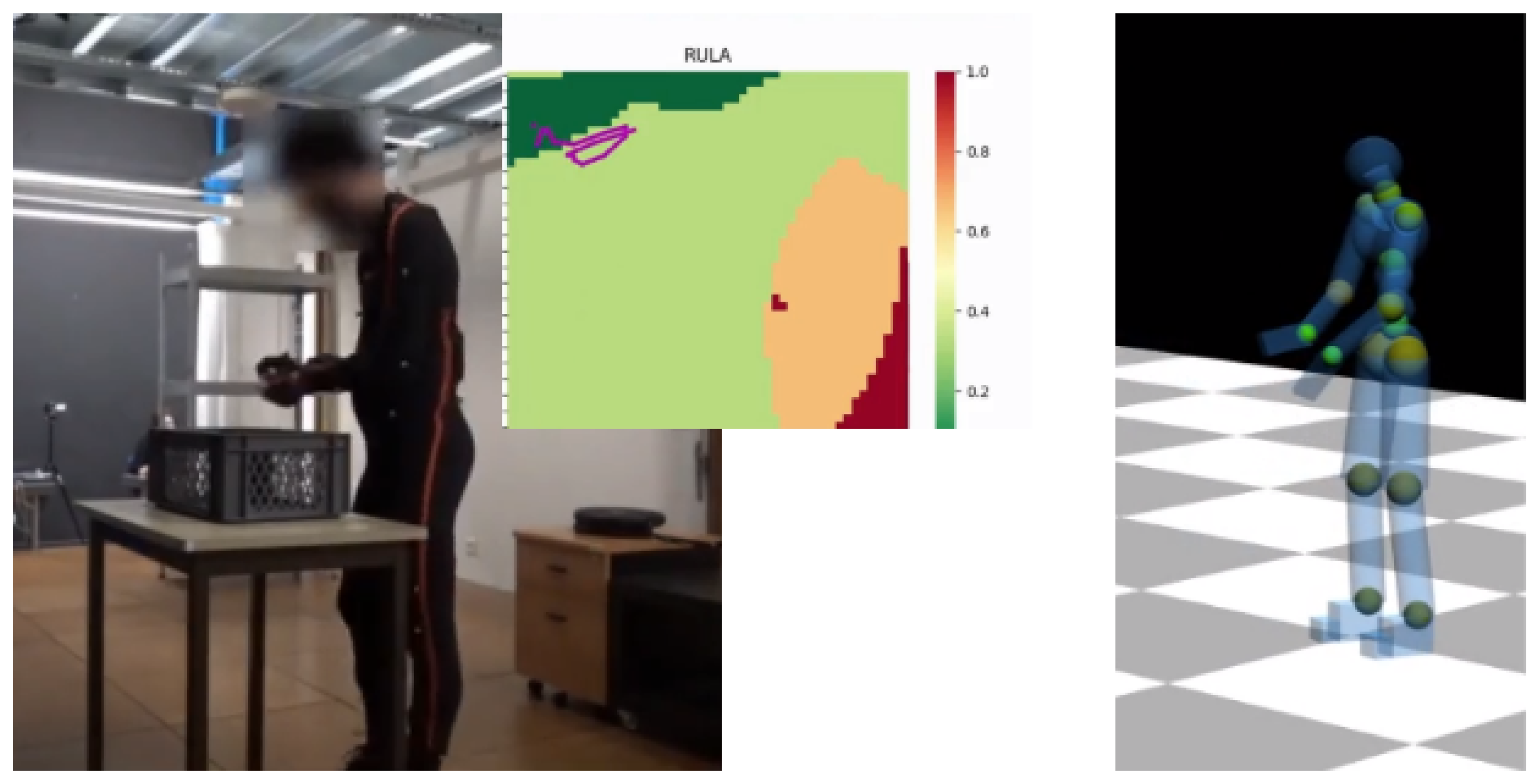{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
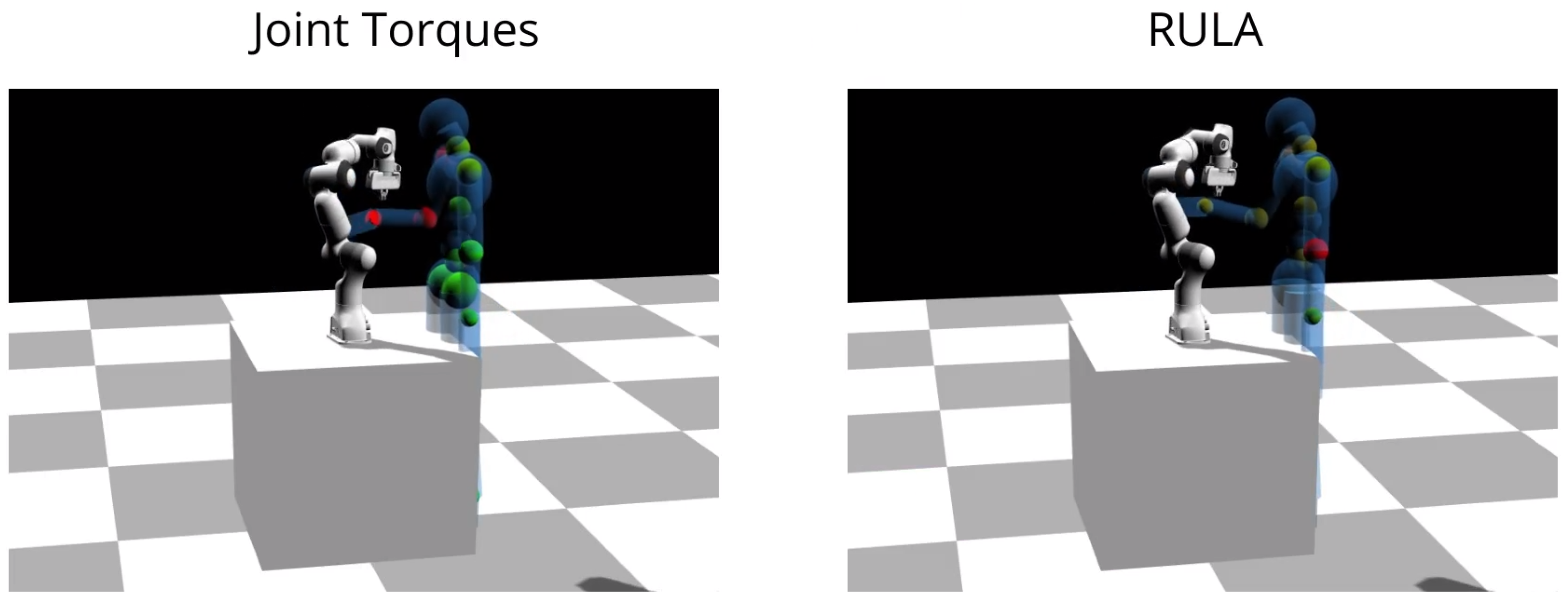
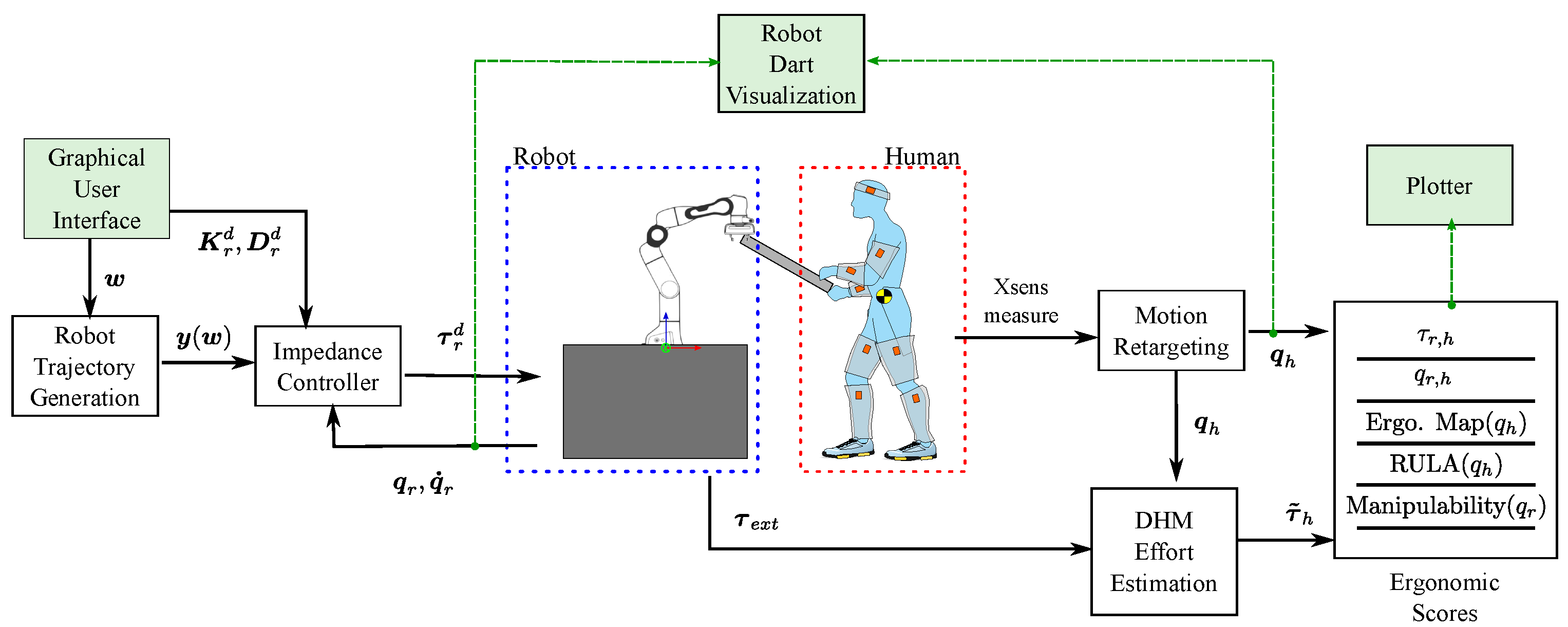
- Online visualization of joint angles and torques for ergonomic feedback. Given a human posture, the framework calculates the ergonomic assessment and an estimation of the human effort. This latter estimation is derived from inversion of the Lagrangian model using variables (e.g., Intertia, Coriolis) extracted from a simulated DHM. This enables to quickly verify a body posture, captured online using a motion capture suit. This visualization consists of a DHM with color-coded visual cues that express specific locations and joints of the body postures that are particularly non-ergonomic, further facilitating the ergonomics assessment.
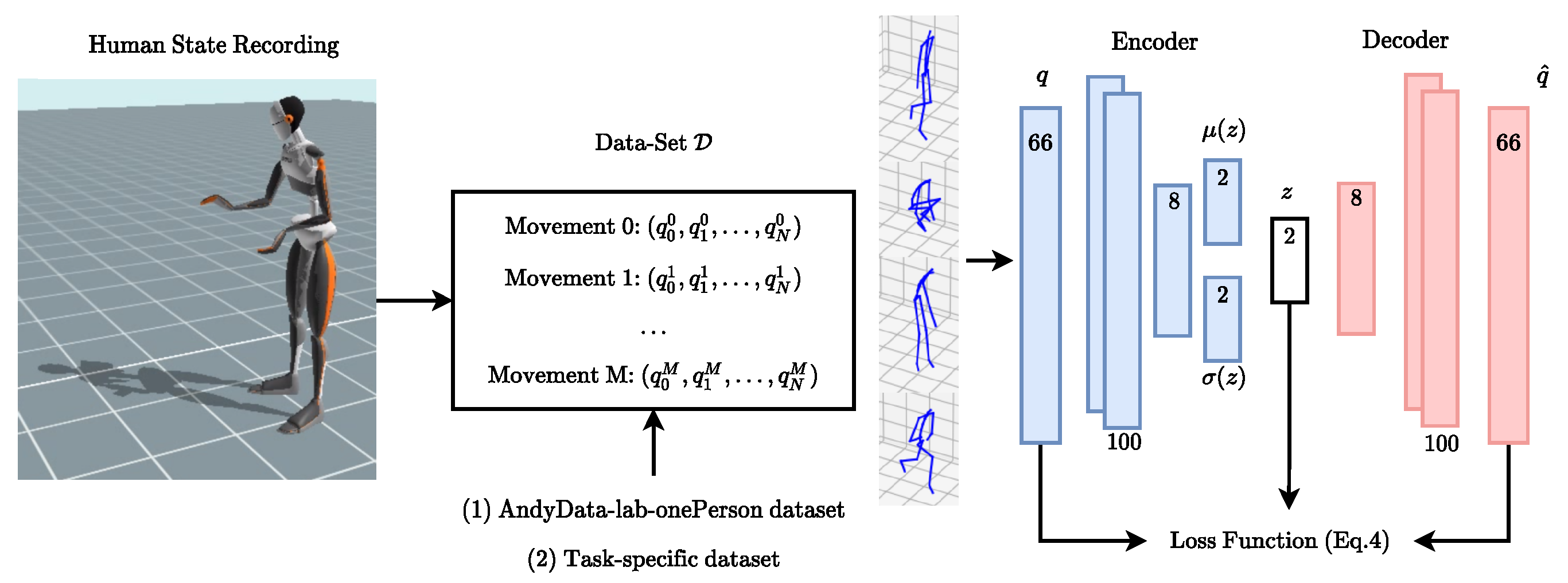
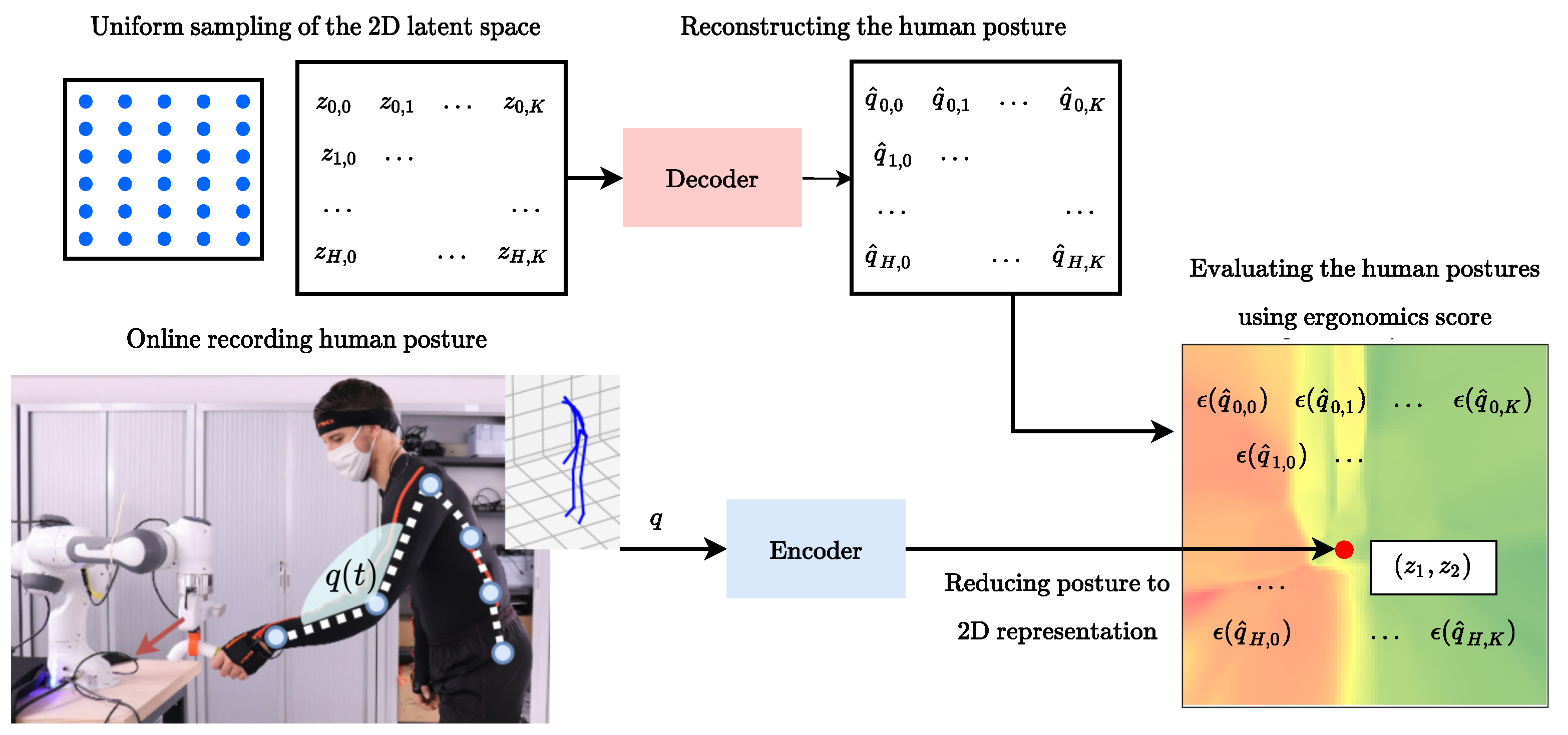
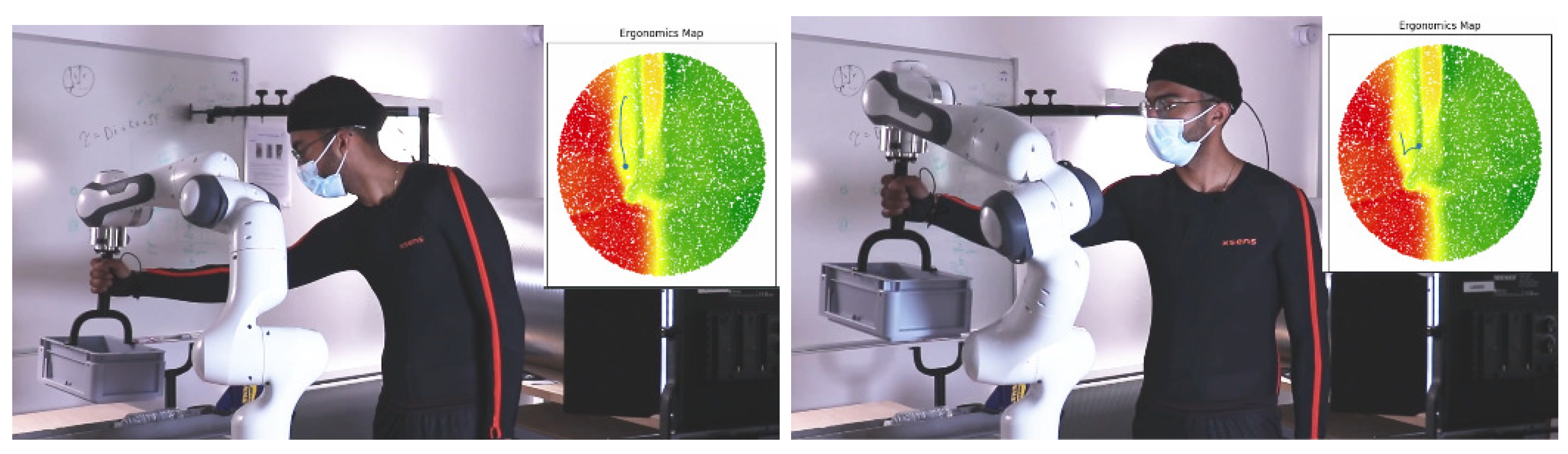
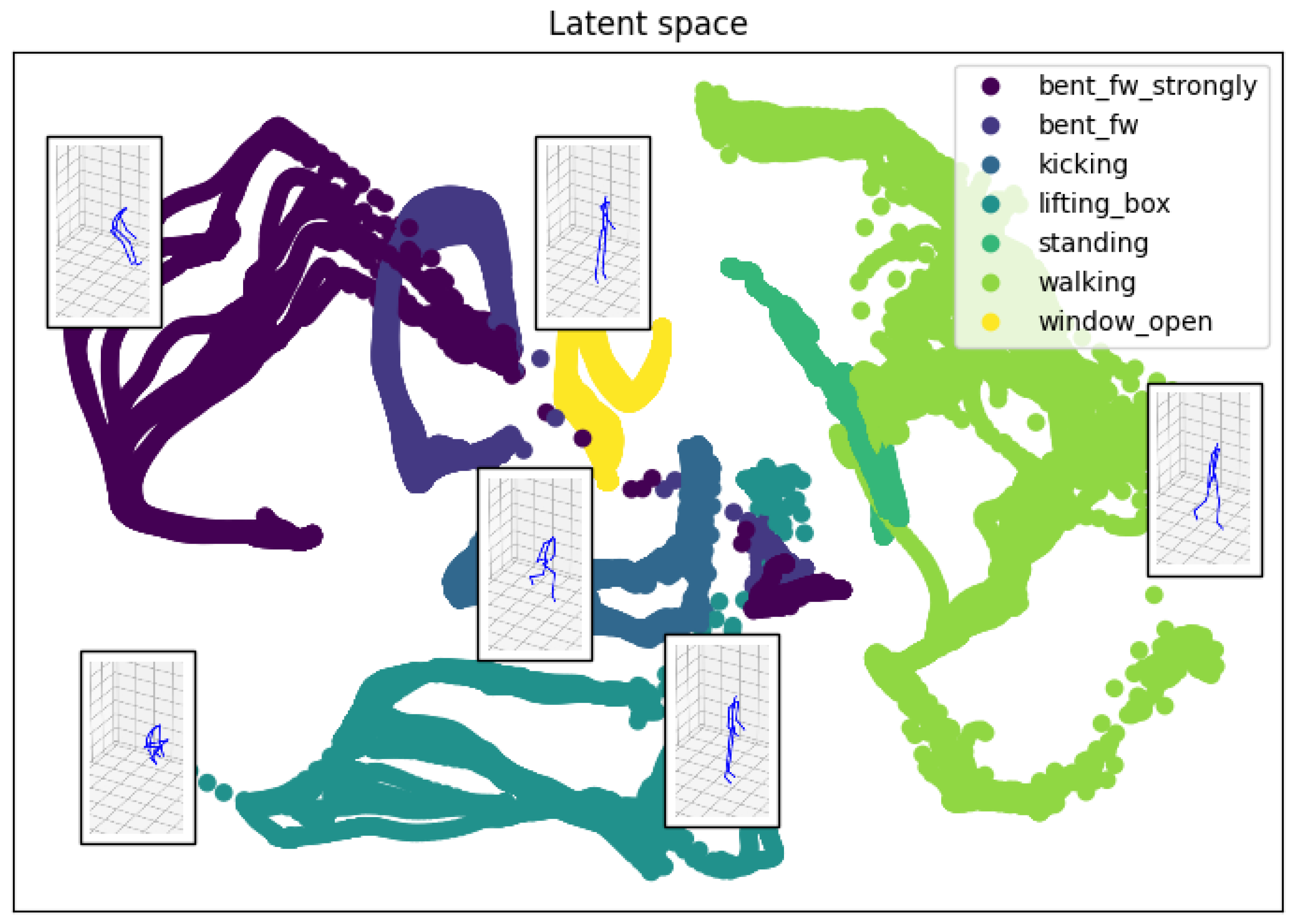
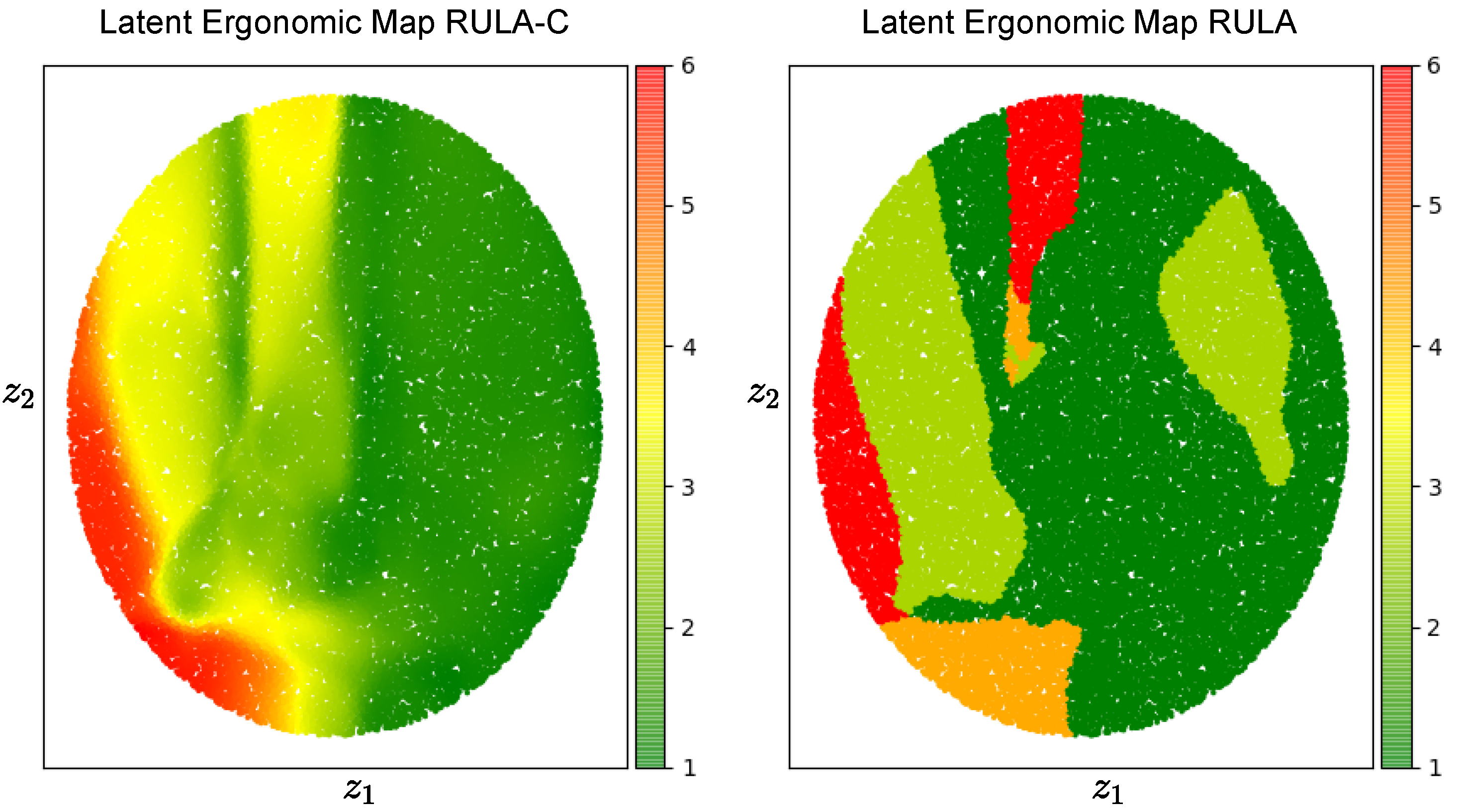
- Latent Ergonomic Maps(LEMs) for immediate overall 2D visual feedback on RULA and RULA-based (RULA-continuous) scores. The algorithm uses a state-of-the-art method for dimensionality reduction and generative network, namely Variational Auto-Encoders (VAE). VAE allows us to encode high dimension postures and to sample and decode variations of the same postures. The latter allows creating a LEM by sampling the latent space, decoding the posture, and applying ergonomic assessment to the posture.
2. Related Work
2.1. Dimensionality Reduction for Human State Representation
2.2. Ergonomics Evaluation and Human-Robot Collaboration
3. Methods
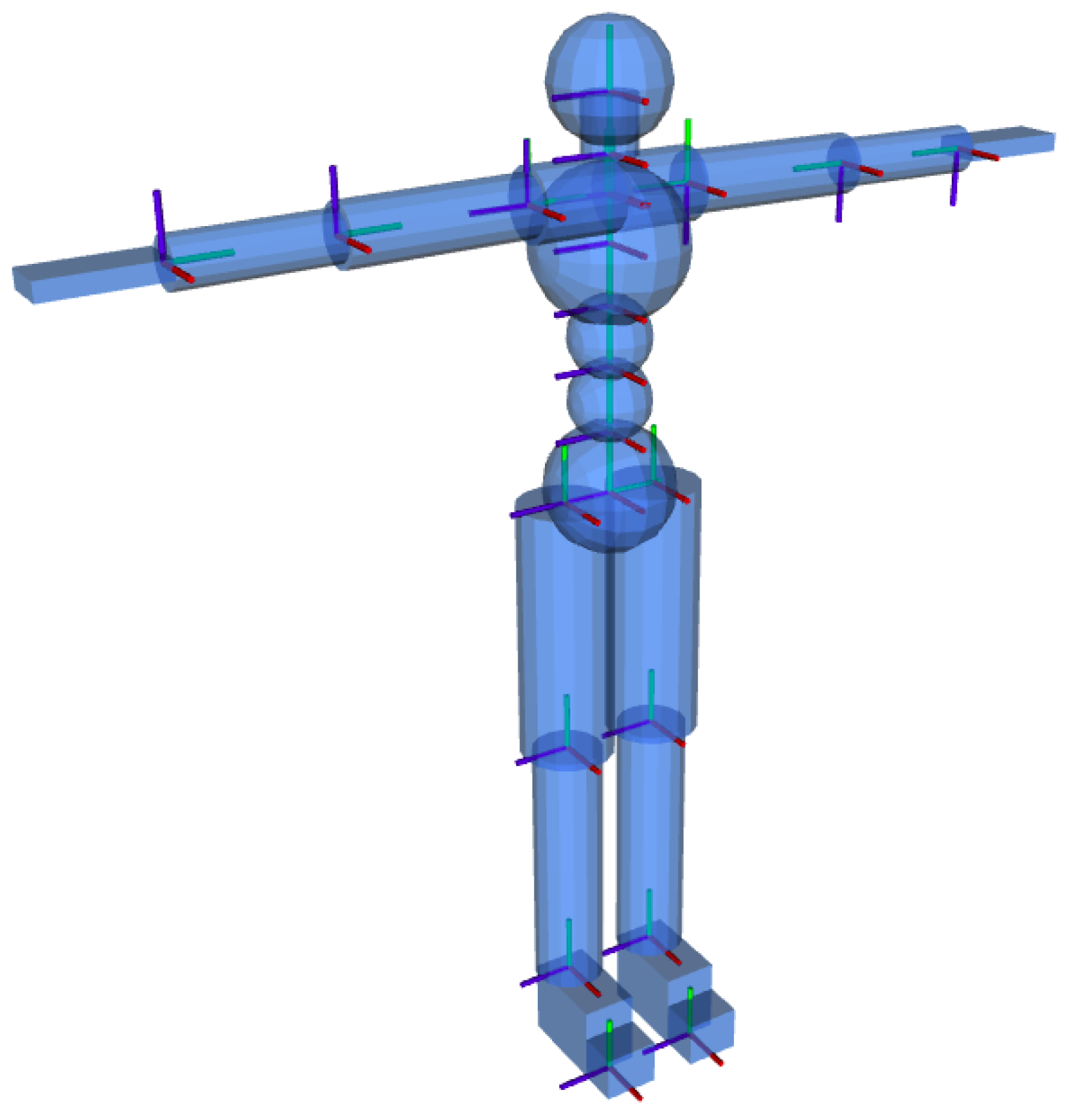
3.1. Digital Human Model
3.2. Ergonomics Scores
3.3. Latent Ergonomics Maps (LEMs)
4. Experiments
4.1. Setup and Scenarios: Experiment 1
4.2. Setup and Scenarios: Experiment 2
4.3. Creating and Visualizing the LEMs
4.4. Visualization of Local Ergonomics Scores in the DHM
5. Discussions and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| WMSD | Work-related Musculo-Skeletal Disorder |
| HRC | Human-Robot Collaboration |
| DHM | Digital Human Model |
| EE | End Effector |
| RULA | Rapid Upper Limb Assessment |
| AE | Auto-Encoder |
| VAE | Variational Auto-Encoder |
| LEM | Latent Ergonomic Map |
| DOF | Degrees Of Freedom |
| COP | Center of Pressure |
References
- Vos, T.; Barber, R.M.; Bell, B.; Bertozzi-Villa, A.; Biryukov, S.; Bolliger, I.; Charlson, F.; Davis, A.; Degenhardt, L.; Dicker, D.; et al. Global, regional, and national incidence, prevalence, and years lived with disability for 301 acute and chronic diseases and injuries in 188 countries, 1990–2013: A systematic analysis for the Global Burden of Disease Study 2013. Lancet 2015, 386, 743–800. [Google Scholar] [CrossRef] [Green Version]
- Punnett, L.; Wegman, D.H. Work-related musculoskeletal disorders: The epidemiologic evidence and the debate. J. Electromyogr. Kinesiol. 2004, 14, 13–23. [Google Scholar] [CrossRef]
- Schneider, E.; Copsey, S.; Irastorza, X. Occupational Safety and Health in Figures: Work-Related Musculoskeletal Disorders in the EU-Facts and Figures; Office for Official Publications of the European Communities: Luxembourg, 2010. [Google Scholar]
- Shafti, A.; Ataka, A.; Lazpita, B.; Shiva, A.; Wurdemann, H.; Althoefer, K. Real-time robot-assisted ergonomics. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- van der Spaa, L.; Gienger, M.; Bates, T.; Kober, J. Predicting and optimizing ergonomics in physical human-robot cooperation tasks. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 1799–1805. [Google Scholar] [CrossRef]
- McAtamney, L.; Corlett, E.N. RULA: A survey method for the investigation of work-related upper limb disorders. Appl. Ergon. 1993, 24, 91–99. [Google Scholar] [CrossRef]
- Hignett, S.; Mcatamney, L. Rapid entire body assessment (REBA). Appl. Ergon. 2000, 31, 201–205. [Google Scholar] [CrossRef]
- Karhu, O.; Kansi, P.; Kuorinka, I. Correcting working postures in industry: A practical method for analysis. Appl. Ergon. 1977, 8, 199–201. [Google Scholar] [CrossRef]
- Busch, B.; Maeda, G.; Mollard, Y.; Demangeat, M.; Lopes, M. Postural optimization for an ergonomic human-robot interaction. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2778–2785. [Google Scholar]
- Peternel, L.; Kim, W.; Babič, J.; Ajoudani, A. Towards ergonomic control of human-robot co-manipulation and handover. In Proceedings of the 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids), Birmingham, UK, 15–17 November 2017; pp. 55–60. [Google Scholar]
- Kim, W.; Lee, J.; Peternel, L.; Tsagarakis, N.; Ajoudani, A. Anticipatory robot assistance for the prevention of human static joint overloading in human–robot collaboration. IEEE Robot. Autom. Lett. 2017, 3, 68–75. [Google Scholar] [CrossRef]
- Maurice, P.; Padois, V.; Measson, Y.; Bidaud, P. Assessing and improving human movements using sensitivity analysis and digital human simulation. Int. J. Comput. Integr. Manuf. 2019, 32, 546–558. [Google Scholar] [CrossRef]
- Latella, C.; Kuppuswamy, N.; Romano, F.; Traversaro, S.; Nori, F. Whole-body human inverse dynamics with distributed micro-accelerometers, gyros and force sensing. Sensors 2016, 16, 727. [Google Scholar] [CrossRef] [Green Version]
- Kim, W.; Lorenzini, M.; Balatti, P.; Nguyen, P.D.; Pattacini, U.; Tikhanoff, V.; Peternel, L.; Fantacci, C.; Natale, L.; Metta, G.; et al. Adaptable workstations for human-robot collaboration: A reconfigurable framework for improving worker ergonomics and productivity. IEEE Robot. Autom. Mag. 2019, 26, 14–26. [Google Scholar] [CrossRef] [Green Version]
- Kim, W.; Lee, J.; Tsagarakis, N.; Ajoudani, A. A real-time and reduced-complexity approach to the detection and monitoring of static joint overloading in humans. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 828–834. [Google Scholar]
- Peternel, L.; Tsagarakis, N.; Caldwell, D.; Ajoudani, A. Robot adaptation to human physical fatigue in human–robot co-manipulation. Auton. Robot. 2018, 42, 1011–1021. [Google Scholar] [CrossRef]
- Maurice, P.; Čamernik, J.; Gorjan, D.; Schirrmeister, B.; Bornmann, J.; Tagliapietra, L.; Latella, C.; Pucci, D.; Fritzsche, L.; Ivaldi, S.; et al. Objective and Subjective Effects of a Passive Exoskeleton on Overhead Work. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 152–164. [Google Scholar] [CrossRef] [Green Version]
- Mandery, C.; Plappert, M.; Borras, J.; Asfour, T. Dimensionality reduction for whole-body human motion recognition. In Proceedings of the 2016 19th International Conference on Information Fusion (FUSION), Heidelberg, Germany, 5–8 July 2016; pp. 355–362. [Google Scholar]
- Chaveroche, M.; Malaisé, A.; Colas, F.; Charpillet, F.; Ivaldi, S. A Variational Time Series Feature Extractor for Action Prediction. arXiv 2018, arXiv:1807.02350. [Google Scholar]
- Marin, A.G.; Shourijeh, M.S.; Galibarov, P.E.; Damsgaard, M.; Fritzsch, L.; Stulp, F. Optimizing contextual ergonomics models in human-robot interaction. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–9. [Google Scholar]
- Dermy, O.; Chaveroche, M.; Colas, F.; Charpillet, F.; Ivaldi, S. Prediction of human whole-body movements with AE-ProMPs. In Proceedings of the 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), Beijing, China, 6–9 November 2018; pp. 572–579. [Google Scholar]
- Malaisé, A.; Maurice, P.; Colas, F.; Ivaldi, S. Activity Recognition for Ergonomics Assessment of Industrial Tasks With Automatic Feature Selection. IEEE Robot. Autom. Lett. 2019, 4, 1132–1139. [Google Scholar] [CrossRef] [Green Version]
- Ghojogh, B.; Ghodsi, A.; Karray, F.; Crowley, M. Factor analysis, probabilistic principal component analysis, variational inference, and variational autoencoder: Tutorial and survey. arXiv 2021, arXiv:2101.00734. [Google Scholar]
- Dilokthanakul, N.; Mediano, P.A.; Garnelo, M.; Lee, M.C.; Salimbeni, H.; Arulkumaran, K.; Shanahan, M. Deep unsupervised clustering with gaussian mixture variational autoencoders. arXiv 2016, arXiv:1611.02648. [Google Scholar]
- Ikemoto, S.; Amor, H.B.; Minato, T.; Ishiguro, H.; Jung, B. Physical interaction learning: Behavior adaptation in cooperative human-robot tasks involving physical contact. In Proceedings of the RO-MAN 2009—The 18th IEEE International Symposium on Robot and Human Interactive Communication, Toyama, Japan, 27 September–2 October 2009; pp. 504–509. [Google Scholar]
- Liu, Z.; Wu, S.; Jin, S.; Liu, Q.; Ji, S.; Lu, S.; Cheng, L. Investigating Pose Representations and Motion Contexts Modeling for 3D Motion Prediction. IEEE Trans. Pattern Anal. Mach. Intell. 2022. Available online: https://www.researchgate.net/publication/357526473_Investigating_Pose_Representations_and_Motion_Contexts_Modeling_for_3D_Motion_Prediction (accessed on 18 May 2022). [CrossRef]
- Ling, H.Y.; Zinno, F.; Cheng, G.; Van De Panne, M. Character controllers using motion vaes. ACM Trans. Graph. (TOG) 2020, 39, 40–41. [Google Scholar] [CrossRef]
- Li, J.; Villegas, R.; Ceylan, D.; Yang, J.; Kuang, Z.; Li, H.; Zhao, Y. Task-generic hierarchical human motion prior using vaes. In Proceedings of the 2021 International Conference on 3D Vision (3DV), Online, 1–3 December 2021; pp. 771–781. [Google Scholar]
- Meng, X.; Weitschat, R. Dynamic Projection of Human Motion for Safe and Efficient Human-Robot Collaboration. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 3765–3771. [Google Scholar]
- Maurice, P.; Malaisé, A.; Amiot, C.; Paris, N.; Richard, G.J.; Rochel, O.; Ivaldi, S. Human movement and ergonomics: An industry-oriented dataset for collaborative robotics. Int. J. Robot. Res. 2019, 38, 1529–1537. [Google Scholar] [CrossRef]
- Bassani, T.; Stucovitz, E.; Qian, Z.; Briguglio, M.; Galbusera, F. Validation of the AnyBody full body musculoskeletal model in computing lumbar spine loads at L4L5 level. J. Biomech. 2017, 58, 89–96. [Google Scholar] [CrossRef]
- Maurice, P.; Padois, V.; Measson, Y.; Bidaud, P. Digital human modeling for collaborative robotics. In DHM and Posturography; Elsevier: Amsterdam, The Netherlands, 2019; pp. 771–779. [Google Scholar]
- Kong, Y.K.; Lee, S.y.; Lee, K.S.; Kim, D.M. Comparisons of ergonomic evaluation tools (ALLA, RULA, REBA and OWAS) for farm work. Int. J. Occup. Saf. Ergon. 2018, 24, 218–223. [Google Scholar] [CrossRef]
- Doty, K.L.; Melchiorri, C.; Schwartz, E.M.; Bonivento, C. Robot manipulability. IEEE Trans. Robot. Autom. 1995, 11, 462–468. [Google Scholar] [CrossRef]
- Tanaka, Y.; Nishikawa, K.; Yamada, N.; Tsuji, T. Analysis of operational comfort in manual tasks using human force manipulability measure. IEEE Trans. Haptics 2014, 8, 8–19. [Google Scholar] [CrossRef]
- Latella, C.; Lorenzini, M.; Lazzaroni, M.; Romano, F.; Traversaro, S.; Akhras, M.A.; Pucci, D.; Nori, F. Towards real-time whole-body human dynamics estimation through probabilistic sensor fusion algorithms. Auton. Robot. 2019, 43, 1591–1603. [Google Scholar] [CrossRef] [Green Version]
- Nee, A.; Ong, S.; Chryssolouris, G.; Mourtzis, D. Augmented reality applications in design and manufacturing. CIRP Ann. 2012, 61, 657–679. [Google Scholar] [CrossRef]
- Malaisé, A.; Maurice, P.; Colas, F.; Charpillet, F.; Ivaldi, S. Activity recognition with multiple wearable sensors for industrial applications. In Proceedings of the ACHI 2018-Eleventh International Conference on Advances in Computer-Human Interactions, Rome, Italy, 25–29 March 2018. [Google Scholar]
- Hong, Y.; Hwang, U.; Yoo, J.; Yoon, S. How generative adversarial networks and their variants work: An overview. ACM Comput. Surv. (CSUR) 2019, 52, 1–43. [Google Scholar] [CrossRef] [Green Version]
- Meng, Q.; Catchpoole, D.; Skillicom, D.; Kennedy, P.J. Relational autoencoder for feature extraction. In Proceedings of the 2017 International Joint Conference on Neural Networks (IJCNN), Anchorage, AK, USA, 14–19 May 2017; pp. 364–371. [Google Scholar]
- Albu-Schaffer, A.; Ott, C.; Frese, U.; Hirzinger, G. Cartesian impedance control of redundant robots: Recent results with the DLR-light-weight-arms. In Proceedings of the 2003 IEEE International conference on robotics and automation (Cat. No. 03CH37422), Taipei, Taiwan, 14–19 September 2003; Volume 3, pp. 3704–3709. [Google Scholar]
- Lee, J.; Grey, M.X.; Ha, S.; Kunz, T.; Jain, S.; Ye, Y.; Srinivasa, S.S.; Stilman, M.; Liu, C.K. Dart: Dynamic animation and robotics toolkit. J. Open Source Softw. 2018, 3, 500. [Google Scholar] [CrossRef]
- Gomes, W.; Maurice, P.; Dalin, E.; Mouret, J.B.; Ivaldi, S. Multi-Objective Trajectory Optimization to Improve Ergonomics in Human Motion. IEEE Robot. Autom. Lett. 2022, 7, 342–349. [Google Scholar] [CrossRef]
- Vianello, L.; Mouret, J.B.; Dalin, E.; Aubry, A.; Ivaldi, S. Human Posture Prediction during Physical Human-Robot Interaction. IEEE Robot. Autom. Lett. 2021, 6, 6046–6053. [Google Scholar] [CrossRef]
- Gomes, W.; Maurice, P.; Dalin, E.; Mouret, J.B.; Ivaldi, S. Improving Ergonomics at Work with Personalized Multi-Objective Optimization of Human Movements. In Proceedings of the 12th International Conference on Applied Human Factors and Ergonomics, New York, NY, USA, 24–28 July 2021. [Google Scholar]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vianello, L.; Gomes, W.; Stulp, F.; Aubry, A.; Maurice, P.; Ivaldi, S. Latent Ergonomics Maps: Real-Time Visualization of Estimated Ergonomics of Human Movements. Sensors 2022, 22, 3981. https://doi.org/10.3390/s22113981
Vianello L, Gomes W, Stulp F, Aubry A, Maurice P, Ivaldi S. Latent Ergonomics Maps: Real-Time Visualization of Estimated Ergonomics of Human Movements. Sensors. 2022; 22(11):3981. https://doi.org/10.3390/s22113981
Chicago/Turabian StyleVianello, Lorenzo, Waldez Gomes, Freek Stulp, Alexis Aubry, Pauline Maurice, and Serena Ivaldi. 2022. "Latent Ergonomics Maps: Real-Time Visualization of Estimated Ergonomics of Human Movements" Sensors 22, no. 11: 3981. https://doi.org/10.3390/s22113981
APA StyleVianello, L., Gomes, W., Stulp, F., Aubry, A., Maurice, P., & Ivaldi, S. (2022). Latent Ergonomics Maps: Real-Time Visualization of Estimated Ergonomics of Human Movements. Sensors, 22(11), 3981. https://doi.org/10.3390/s22113981