3.1. Investigating Acoustic Wave Coherence Using the FRR
The behavior of the acoustic FRR was analyzed using the Sagnac-effect-based resonant fiber optic gyro model derived by Ying et al. [
21] for an optical system. This formulation was chosen for our analysis of the passing of acoustic waves through the adhesive bond because it includes a coupling loss coefficient for the coupler. For fused optical couplers, this loss might be negligible; for the adhesively bonded coupler, it is expected to be significant.
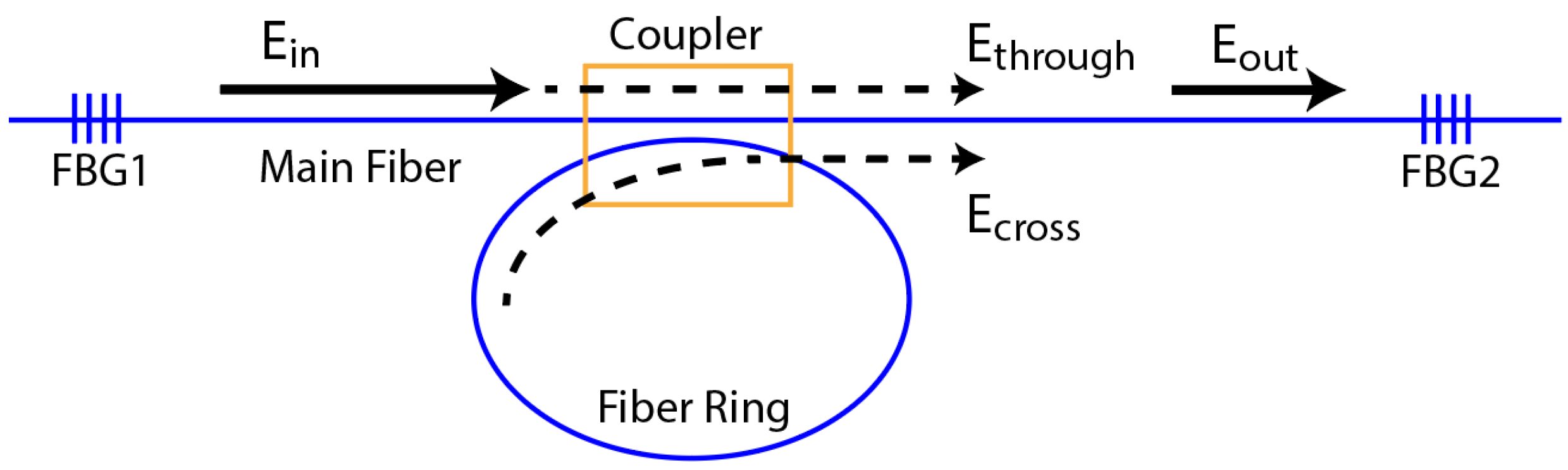
Figure 3 shows the acoustic wave pathways through the FRR.
The input wave to the system,
, is measured with FBG 1. In the model of Ying et al. [
21], the input wave amplitude is defined as a function of time:
where
is the amplitude of the wave,
is the input frequency,
k is the frequency sweep rate of the wave and
is the initial phase of the wave. The wave then reaches the FRR and a portion passes directly through the main optical fiber without going through the FRR,
:
where
is the coupling coefficient of the coupler and
is the coupling loss coefficient. These two coefficients are defined as the fraction of the intensity of the wave, either coupled or dissipated, which is why Equation (2) includes the square root of these terms. The portion of the wave entering the fiber ring is expressed as:
and the remaining portion is dissipated through the coupler loss. The wave
circles the FRR, and a portion is recoupled into the main optical fiber.
The portion remaining in the FRR circles the FRR through multiple passes, each time coupling a portion of the wave into the main fiber, until the amplitude of the wave is negligible. Each time the wave propagates through the ring it is attenuated, due to the propagation loss per unit length in the fiber ring,
, and is phase-shifted due to the optical path length of the ring. The value for
in a standard, polyimide-coated single-mode optical fiber for the L
01 mode at 300 kHz was measured by Wee et al. [
4] to be
. The sum of the waves exiting the FRR with each pass is labeled as
. After the
Nth pass through the fiber ring, the resulting
is expressed as:
The transit time is calculated as
, where
c0 is the velocity of the acoustic mode in the ring fiber and
L is the length of the ring. The velocity of the acoustic mode in each fiber type was previously measured experimentally using laser Doppler vibrometry by the current authors [
9]. The output wave amplitude after the FRR is the total of these two contributions, expressed as:
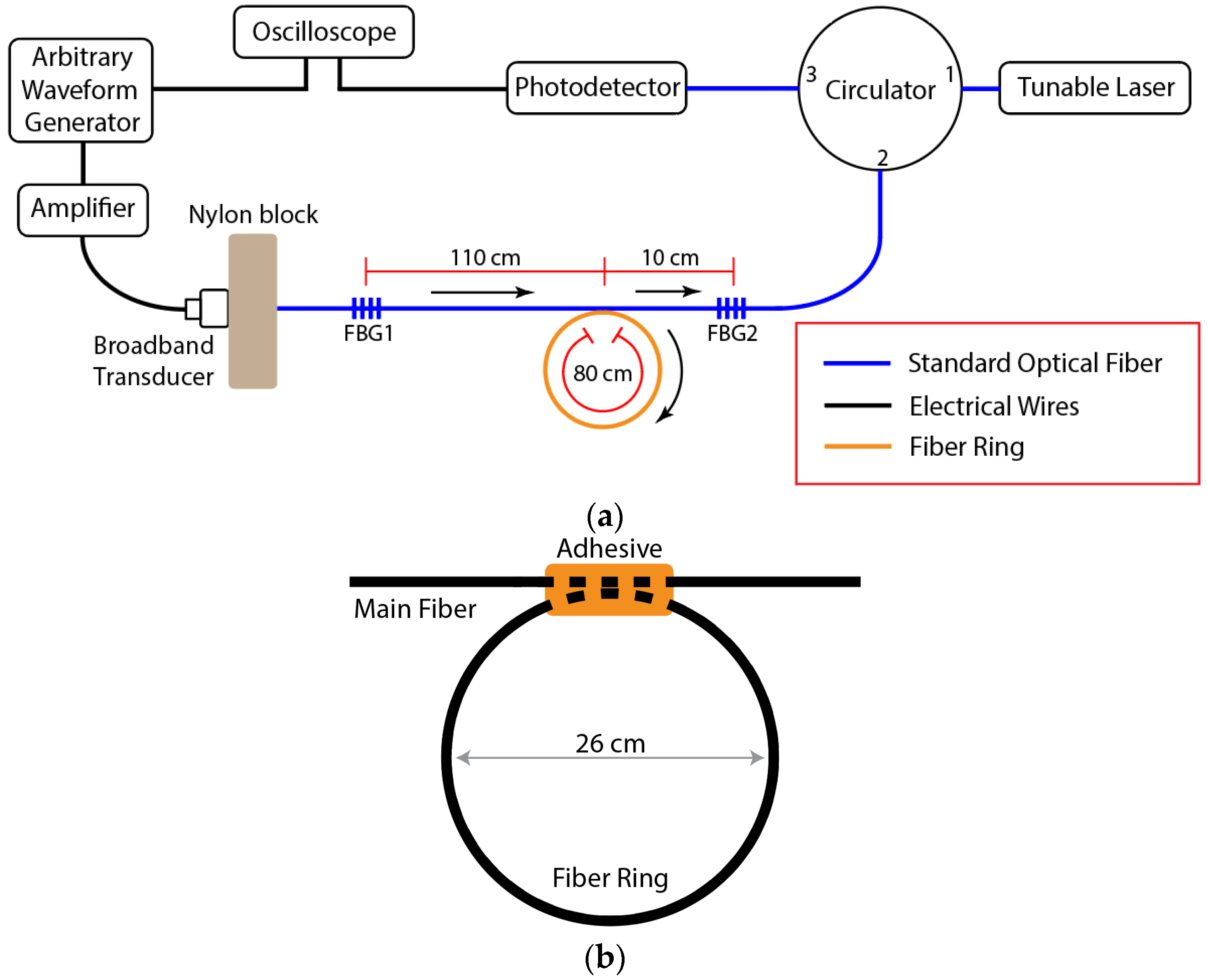
Initial experiments were performed with standard single-mode fiber as the ring and a 700 kHz and 702 kHz excitation signal.
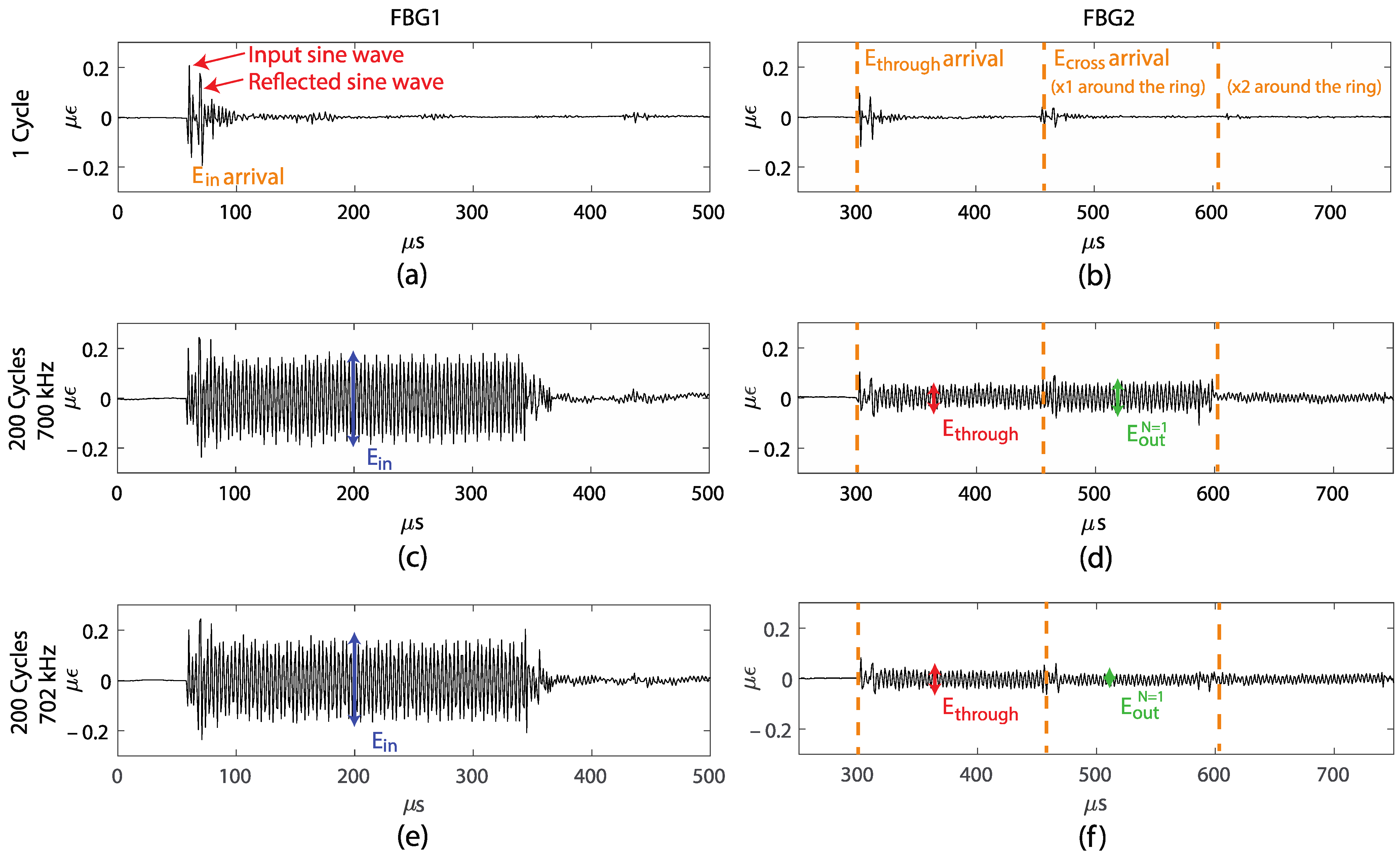
Figure 4a–f show the recorded signals at FBG1 and FBG2 for these experiments.
Figure 4a shows
measured by FBG1 for 1 cycle of the sine-wave input. At around 60 μs, we observed the input sine wave, and after approximately 10 μs we observed a second sine wave, which is a reflection that is possibly caused by the wave traversing through the nylon block.
Figure 4b shows the FBG2 reading for the same excitation, with the waves
and
after the first pass through the ring, and
after the second pass through the ring. The theoretical arrival time for each signal is marked in
Figure 4b, confirming the identification of each wave. As the velocities of the acoustic modes are much slower than the optical light waves in optical fibers, the separation time is visible in the measurements and is much larger than the burst duration. Therefore, no interference occurs between
and the multiple
. In addition, we can see the actual waveform in the signals. However, from this experiment, we observed that the amplitude of
after the second pass through the ring is small compared to the other wave packets; therefore, we only considered
after the first pass in the subsequent experiments. This rapid decay is due to the loss in the coupler and the propagating loss in the fiber ring, which are both significant for these experiments.
Figure 4c shows the input wave to the FRR, as measured by FBG1, when the number of cycles per burst is increased to 200, thus increasing the duration of the wave packet to approximately 300 μs. The double sine wave input seen in
Figure 4a is repeated as the number of cycles of the sine wave is increased, as seen in
Figure 4c–f. Although not as ideal as a sinusoidal wave, the periodic form allows the wave packets to interfere. The amplitude of the input signal
is shown in
Figure 4c. Since the duration of
was increased, the wave packet of
partially overlapped and interfered with the wave packet of
. In
Figure 4d, the amplitude of
and the amplitude of the signal when
represents the interference outcome of
and
are shown. To demonstrate that interference is actually occurring, the frequency of the input wave was changed slightly.
Figure 4e,f show the same FBG1 and FBG2 measurements but, at 702 kHz, there is an input excitation. In
Figure 4d we can observe constructive interference as
overlaps with
and, in
Figure 4f, we can observe the destructive interference.
We next used the theoretical model to estimate the coupling coefficient and coupling loss coefficient for the coupler. From
Figure 4b, we can observe that the amplitude of the wave decreases significantly when
is greater than 2; thus, we only theoretically model the wave interference of the acoustic FRR for
. Since each measurement is taken at a fixed frequency, the sweep rate,
k, is zero and the input wave equation becomes:
Setting
, we find the power ratio of the output and input wave by:
where the only unknown parameters are
kc and
ac. Therefore, we can use the measurements at two different frequencies to fit the values of
kc and
ac. Since the full waveform can be measured, in contrast to optical measurements, we do not need to average the amplitude ratio over time; instead, we can determine the amplitude directly from the waveform.
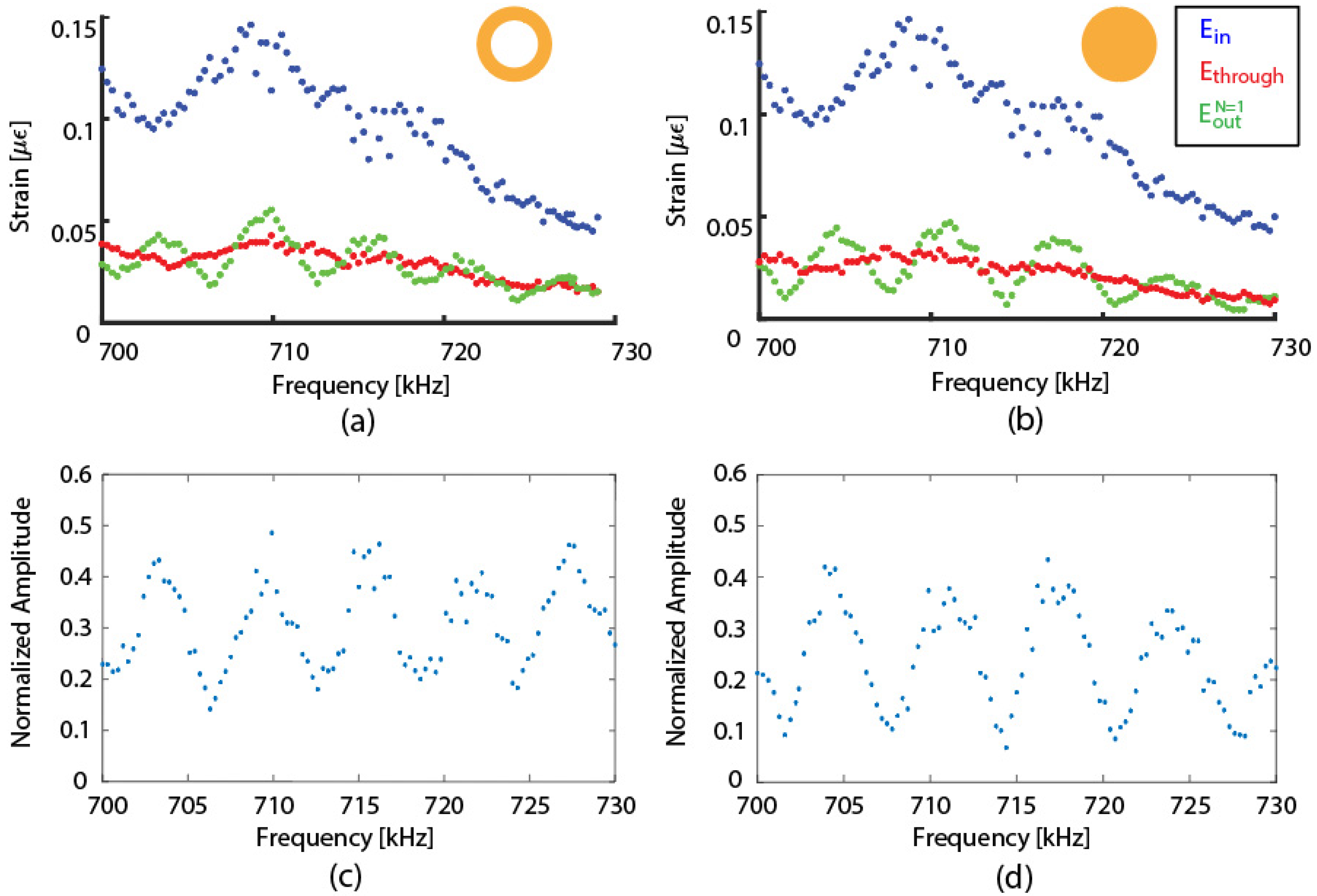
Figure 5a,b plot the peak-to-peak amplitude measurements of
,
, and
as a function of the input frequency
.
Figure 5a shows the result for the 75 μm hollow-core fiber, while
Figure 5b shows the result for the standard 125-μm single-mode solid fiber. Between the two experiments, the ring was removed, and the standard single-mode fiber ring was attached to the main optical fiber. Therefore, the coupling to the broadband transducer and
remained the same. The amplitude of
varied with frequency because the output amplitude from the broadband transducer varied; the wave coupling can vary with the frequency at the transducer to the nylon block interface and at the nylon block to the main fiber interface. Based on these data sets, we examined the wave interference pattern, as shown in
Figure 5c,d in which the
interference pattern is normalized with
.
The results in
Figure 5c,d resemble the frequency response of an optical interferometer. In fact, the free spectral range can be calculated using the exponential term in Equation (7), in which the frequency values that satisfy the condition
for all positive
integers mark the locations of the peaks. Using the length of the FRR and the velocity of the
mode, the free spectral range of the 75-μm hollow-core fiber ring is 5.1 kHz, while the free spectral range of the standard single-mode fiber ring is 6.5 kHz, which is consistent with the experimentally measured data in
Figure 5c,d. Therefore, the wave before and after the coupler interfered coherently.
We next fitted the data from the measurements at the two frequencies into Equation (7), to find the
and
for each fiber type. The results are shown in
Table 1. The coupling coefficient,
, varied from approximately 0.6 to 0.8 and increased with the fiber silica cross-sectional area of the ring fiber. This behavior was consistent with the previous experiments by Kim et al. [
9]. The coupling loss,
, was significant for all cases, as expected. In particular, the value for the 220 μm solid fiber ring was much larger than in the other cases, which may be due to the significant fiber size mismatch between the two fibers. In addition, the ring fiber was bent into a circular configuration prior to bonding; therefore, the large-diameter fiber probably put more stress on the adhesive bond. These results show that the property of the acoustic FRR system can be tuned, based on selecting different fiber ring geometries.
3.2. Demonstration of Acoustic FRR as Sensors
Based on the experiments of the previous section, an FRR can easily be fabricated and attached to any existing sensing fiber using the adhesive coupler, to function as a separate sensor. To show the function of an FRR as a sensor, two demonstrations were performed. One demonstration measures the mode attenuation in a ring in response to a changing external environment, due to a changing water level, and one measures an optical path-length change in the ring due to temperature. Note that these demonstrations were only conducted to show possible applications, and that they were not optimized for practice.
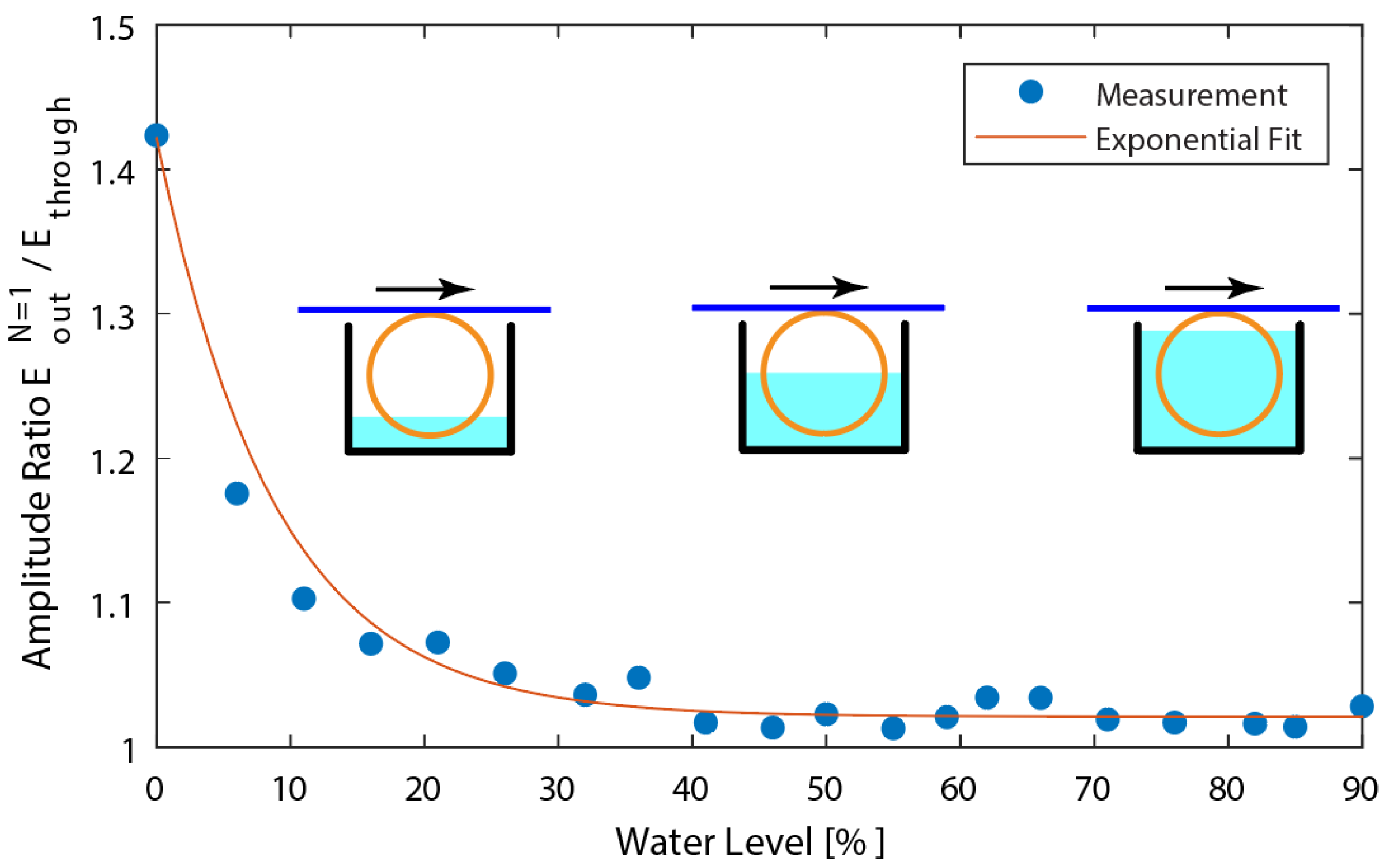
The first demonstration utilized the acoustic FRR as a water-depth sensor, based on the amplitude of the signal from the ring fiber. The acoustic wave in the waveguide attenuated faster when the external medium was water rather than air; so, depending on the amount of fiber ring being submerged in water, the interference pattern will change. For this demonstration, a standard single-mode fiber ring was used. The setup is identical to
Figure 2; however, the fiber ring was put inside a water tank and the measurements were taken as the water level was incrementally increased. The input wave was set at 703 kHz frequency, so that the interference pattern would be constructive.
Whereas the original coefficient of attenuation around the fiber ring was
, the attenuation coefficient is now expressed as:
where
Lw is the length of the fiber that is submerged in water.
Figure 6 shows the measured
interference pattern for water levels from 0% to 90%, along with an exponential curve fitted to the data. The output is normalized to
, so that the value of 1 corresponds to there being no energy remaining after the wave travels around the fiber ring. As the water level increased, the amplitude of
reduced rapidly; thus, the amplitude ratio decreased, as expected. The sensor output was saturated when approximately 40% of the ring was submerged, confirming that the attenuation in water is considerably higher than that in air.
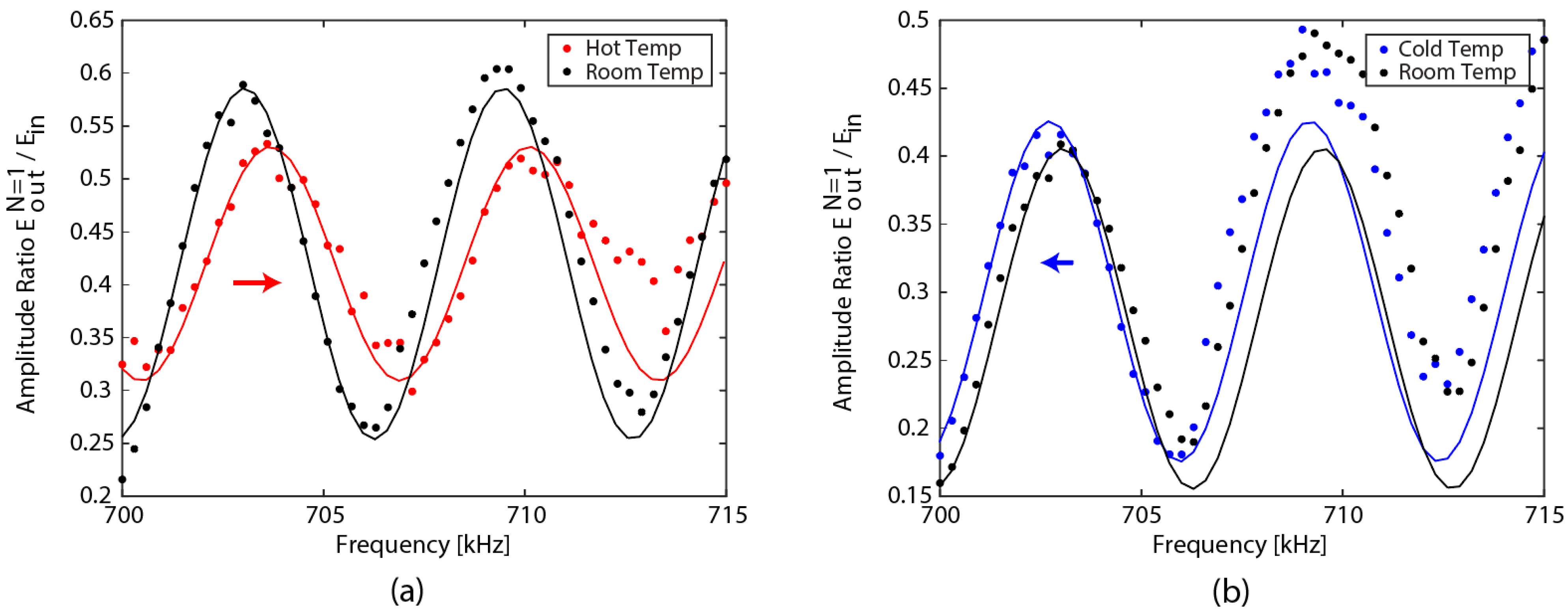
The second demonstration utilized the acoustic FRR as a temperature sensor, using the coherent interference of the acoustic wave. The standard single-mode fiber ring from
Figure 2 was put inside an insulated container and the output amplitude was measured in a frequency range from 700 kHz to 715 kHz. Measurements were performed at three different temperatures: room temperature (21.0 °C), hot temperature (40.3 °C), and cold temperature (11.6 °C). First, the measurements were taken at room temperature, then the temperature was raised to the appropriate hot temperature by placing heat packs inside the container. The FRR was left in the container for 1 h before taking measurements so that it could adjust to the hot temperature. After cooling the FRR back down, the measurements at room temperature were taken again; then, the temperature was lowered to the cold temperature by placing ice packs inside the container. The FRR was left in the container for 1 h, again, before taking measurements. The temperature inside the container was independently measured with a thermometer.
Figure 7 shows the frequency response measurements and their fitted curves.
Figure 7a shows the frequency response for room temperature and the hot temperature, while
Figure 7b shows the frequency response for room temperature and the cold temperature. In
Figure 7a, the measurement of the hot temperature is noisier than the other three measurements, due to the physical interference of the hot pack inside the container; the FBG was hanging in mid-air during measurements. A fast Fourier transform was performed on the four wave interference patterns to find the free spectral range, which was identical at 6.45 kHz. Using this information, sinusoidal curves were fitted to the frequency response, from which the peak frequency shift was found for each temperature change. The amplitude of the measurements drifted during the experiments, potentially due to changes in the support condition and the resulting contact with the coupler. However, the input frequencies for the peak locations were still the same between the fitted curve and the measured curve. For the temperature change of +19.3 °C (from room temperature to the hot temperature) the peak frequency increased by 628 Hz and, for a temperature change of −9.4 °C (from room temperature to the cold temperature), the peak frequency decreased by 314 Hz. This result shows that the shift in the wave interference pattern is directly related to the change in the environmental temperature, and the calculated sensitivity value is 33.0 Hz/°C.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}