
Model Predictive Control of a Novel Wheeled–Legged Planetary Rover for Trajectory Tracking

Abstract
:1. Introduction
2. Hardware and Kinematics of the Rover
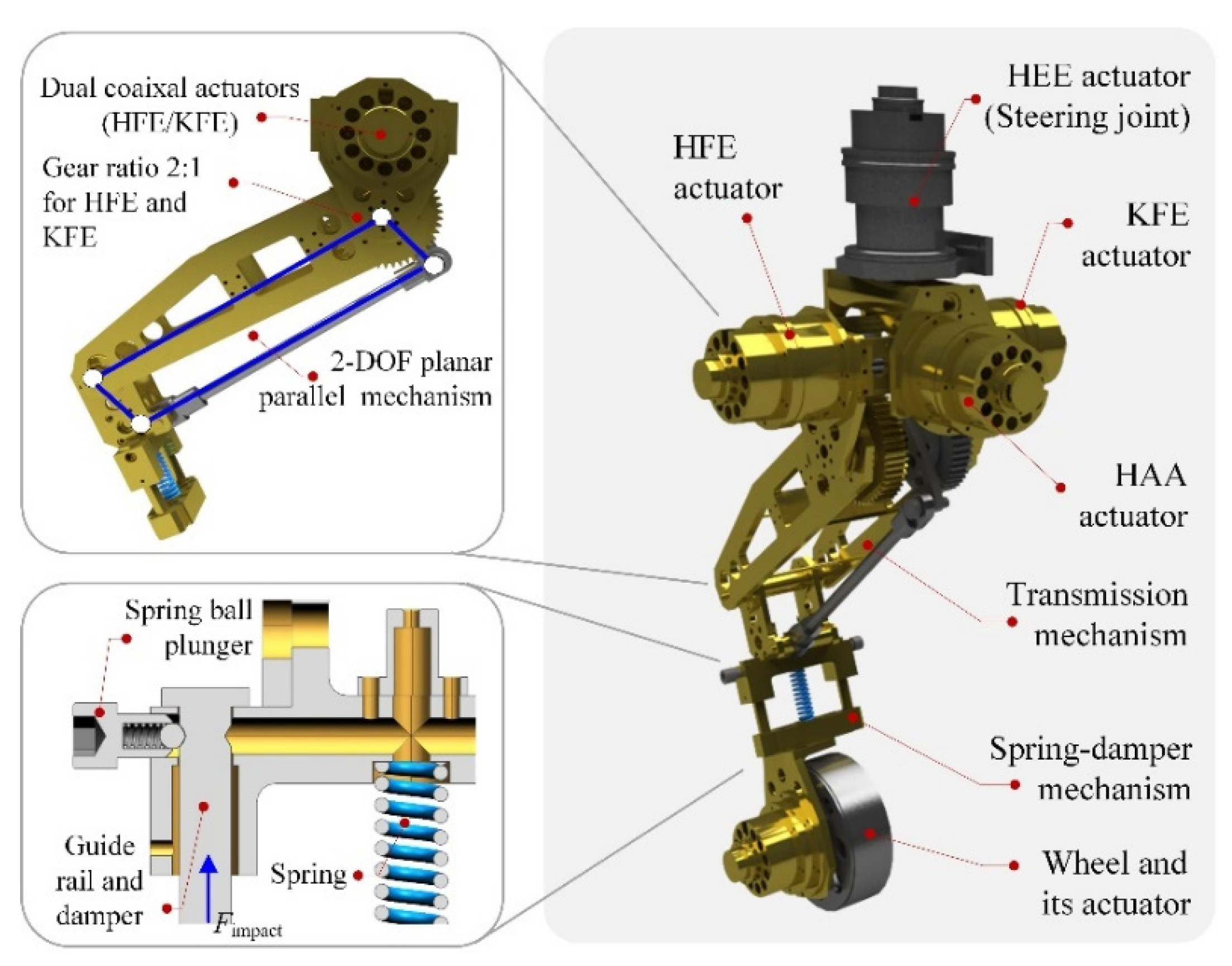
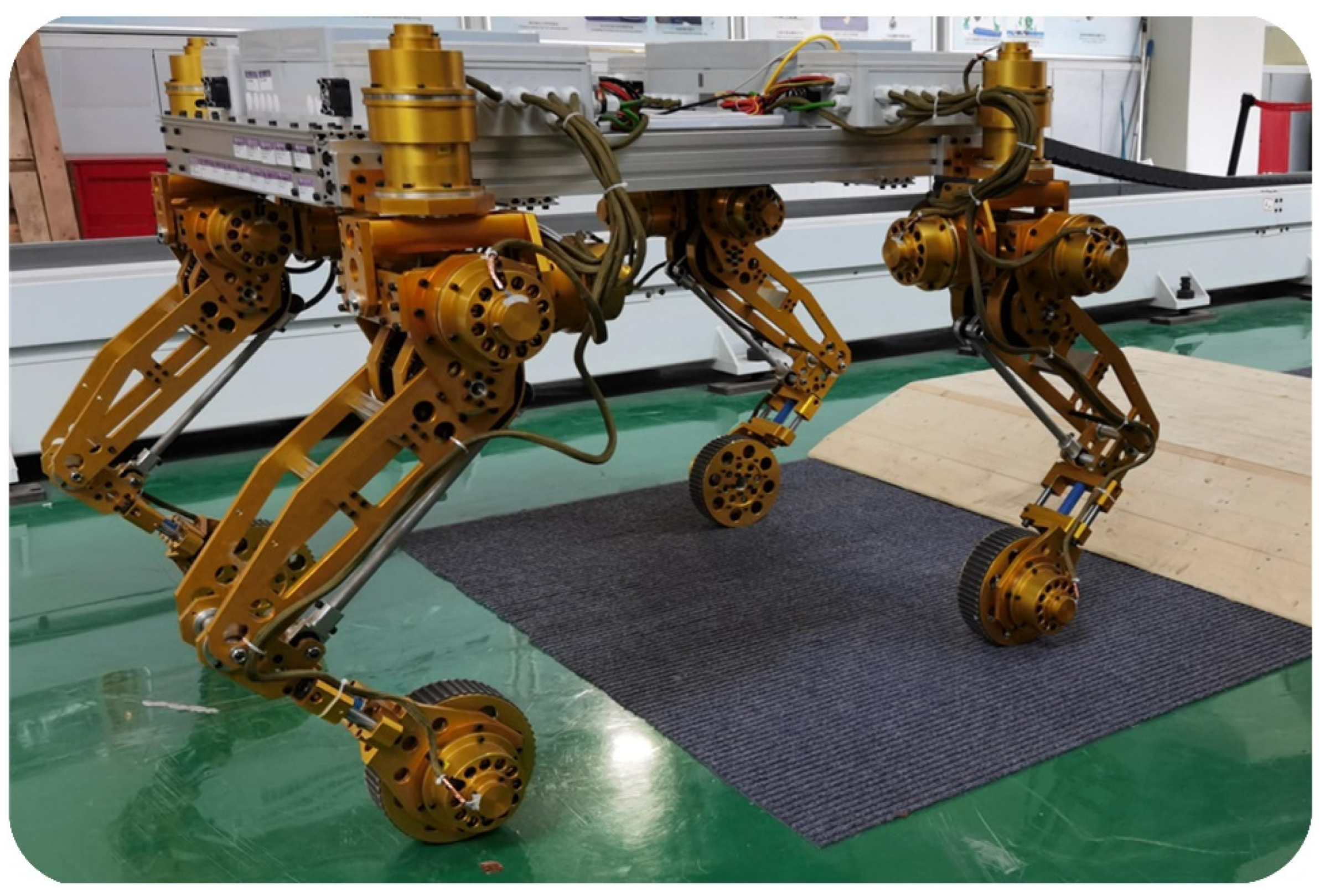
2.1. Mechanical Structure
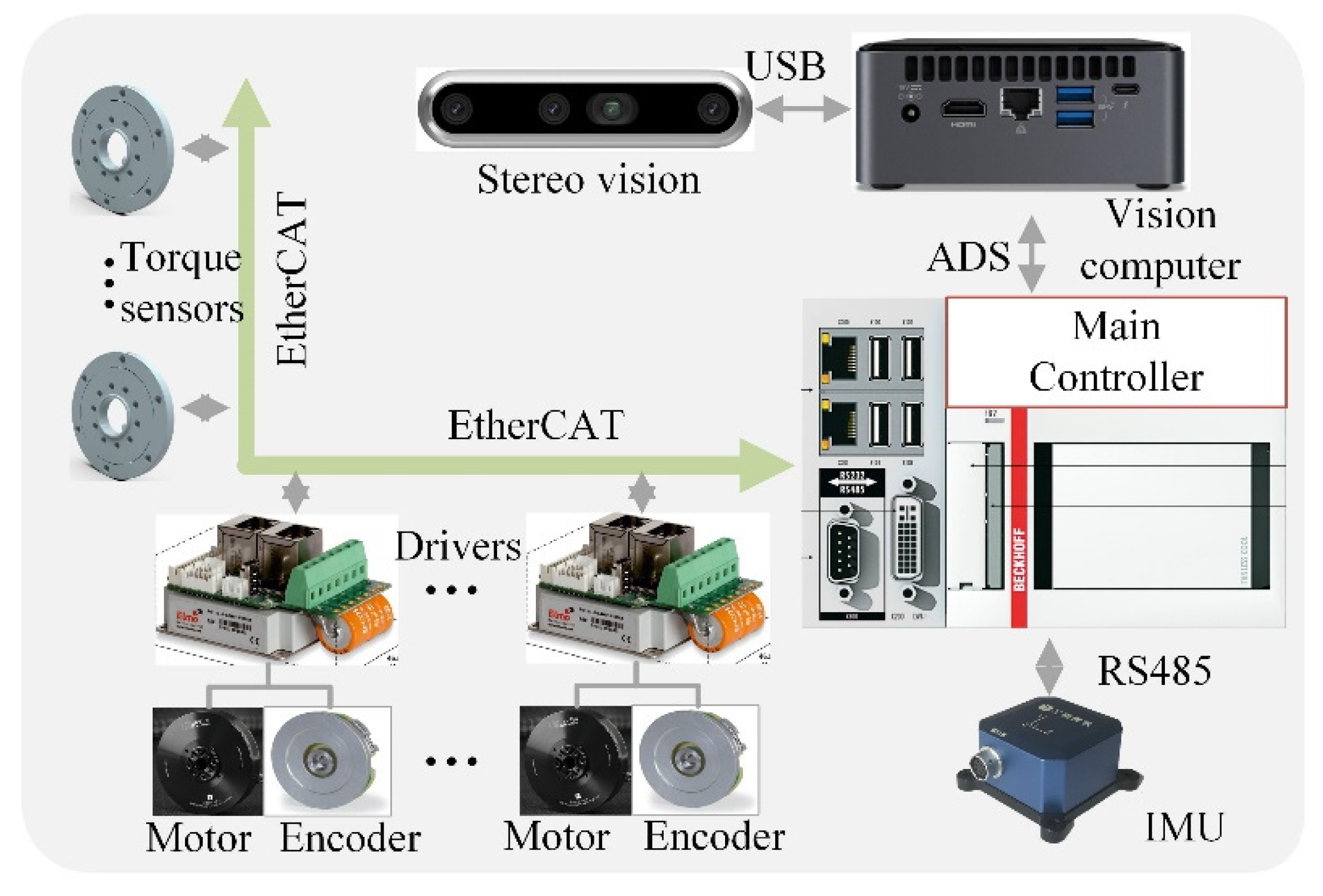
2.2. Perception and Control System
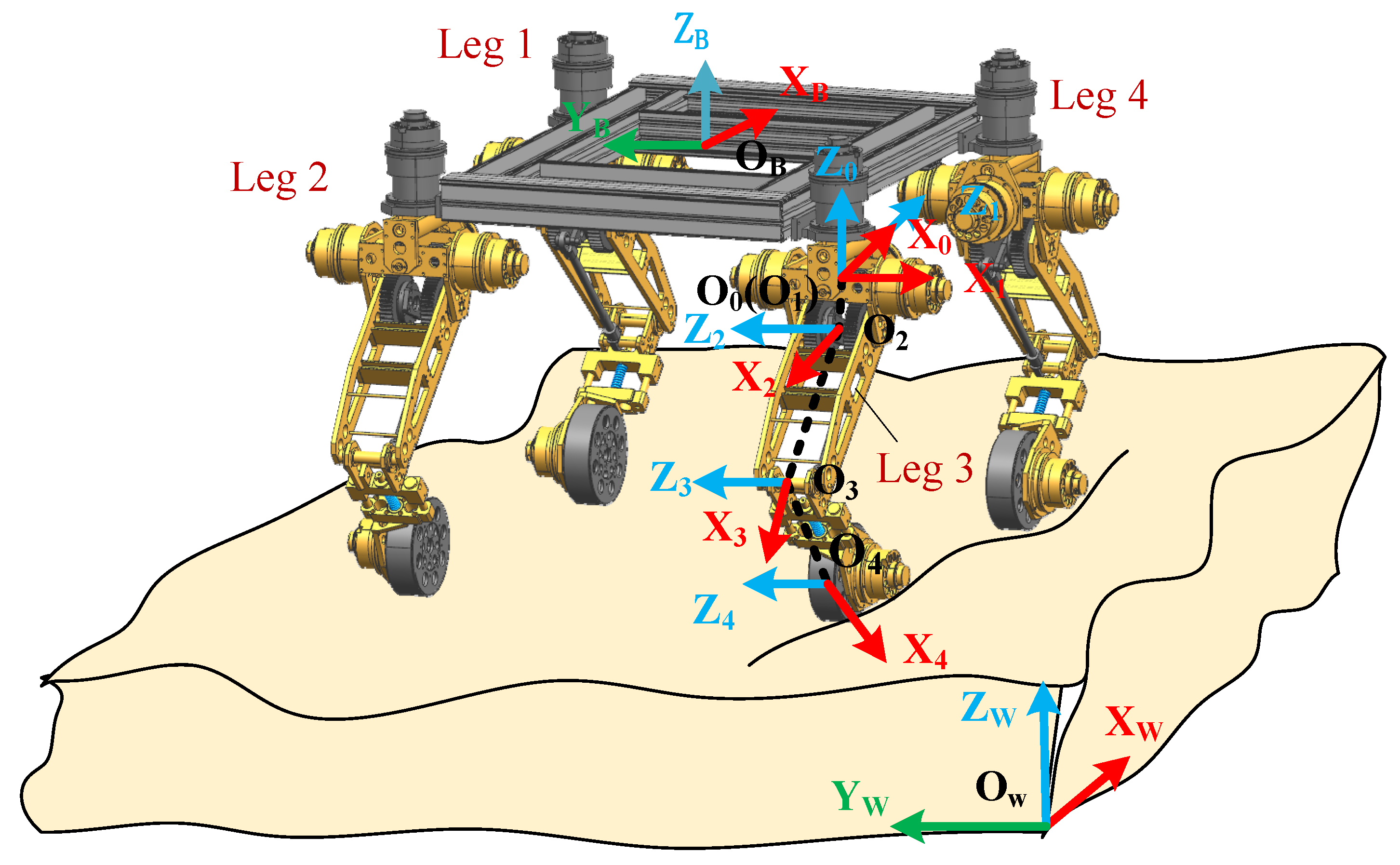
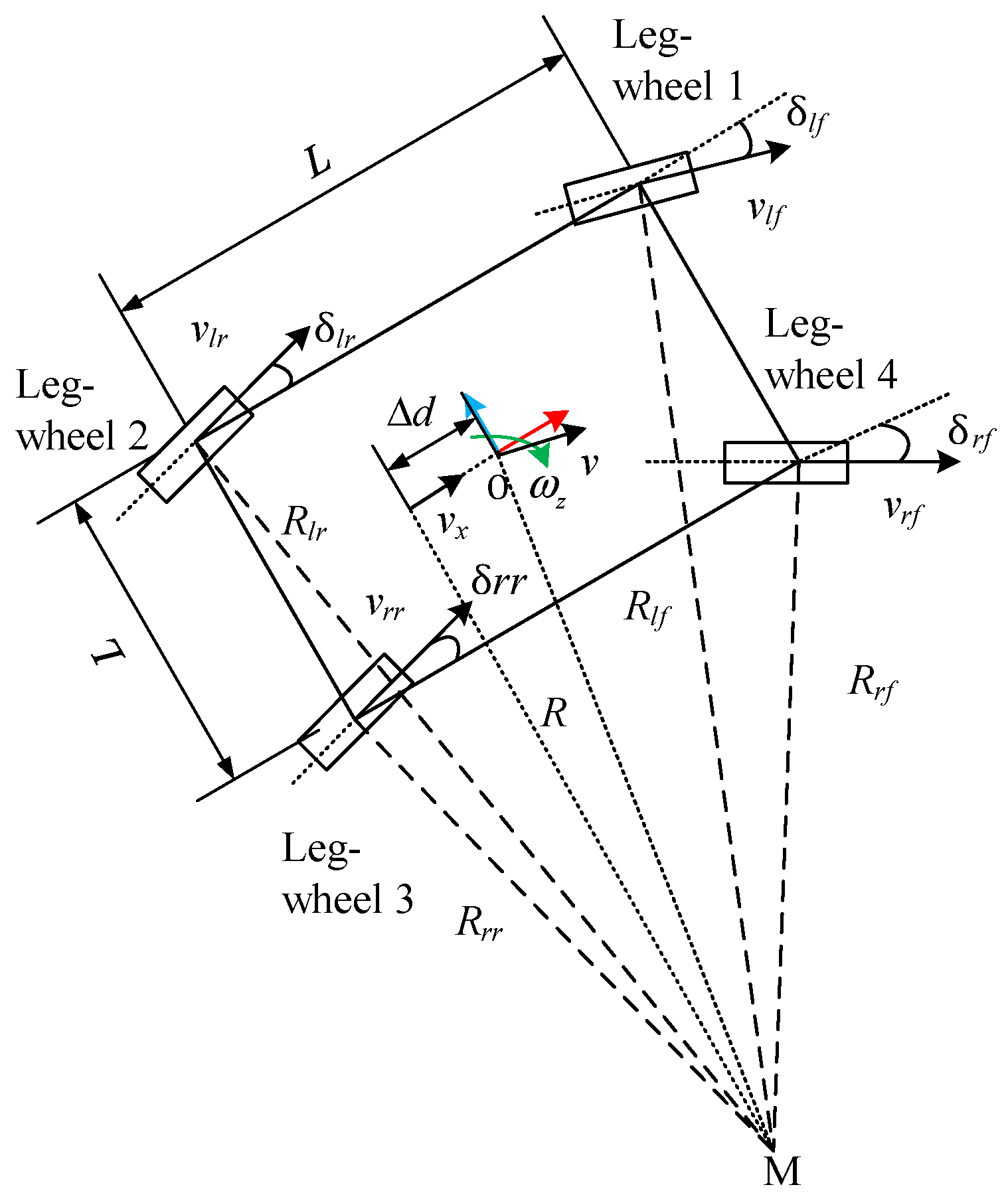
2.3. Kinemactics of the Rover
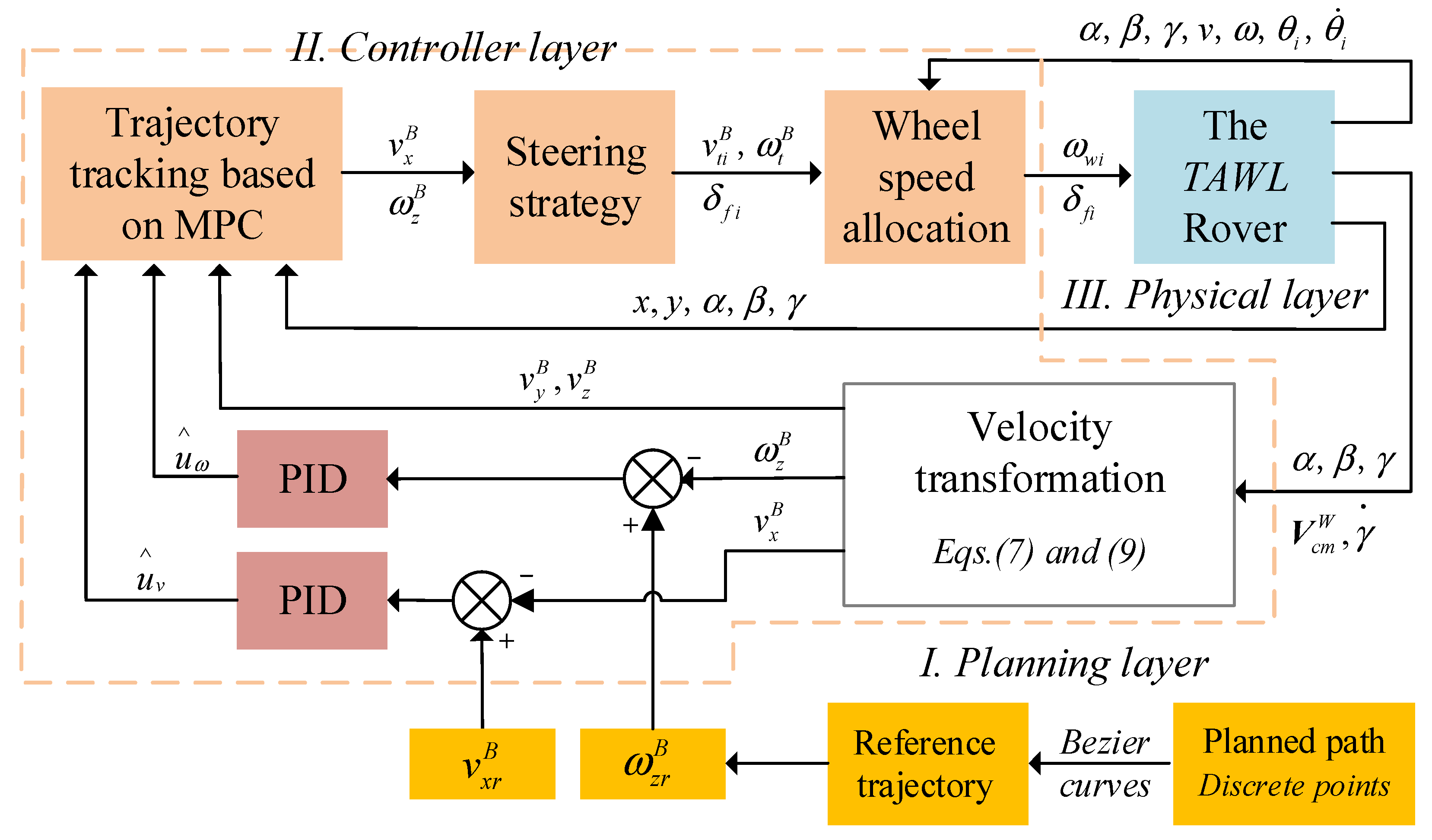
3. Control Strategy
3.1. Locomotive Equations
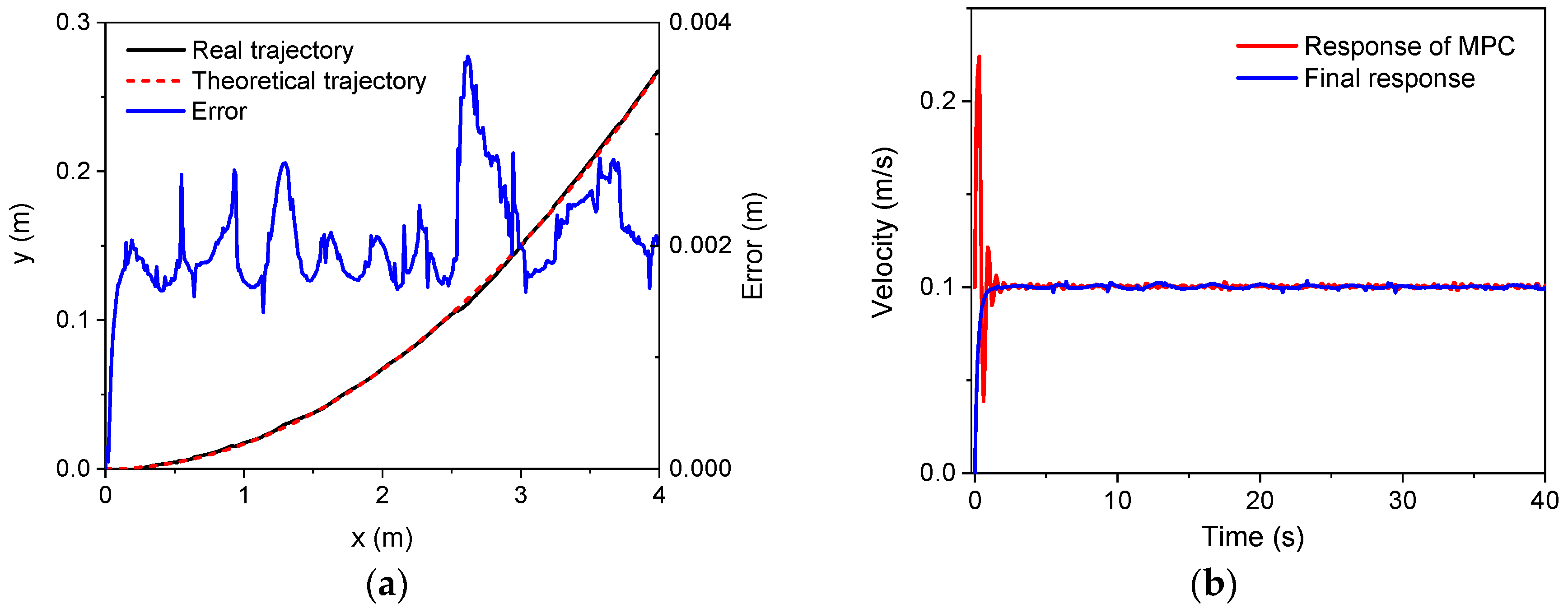
3.2. Trajectory Tracking Model Based on MPC
3.2.1. Objective Function
3.2.2. Constraints
3.3. Streering Strategy
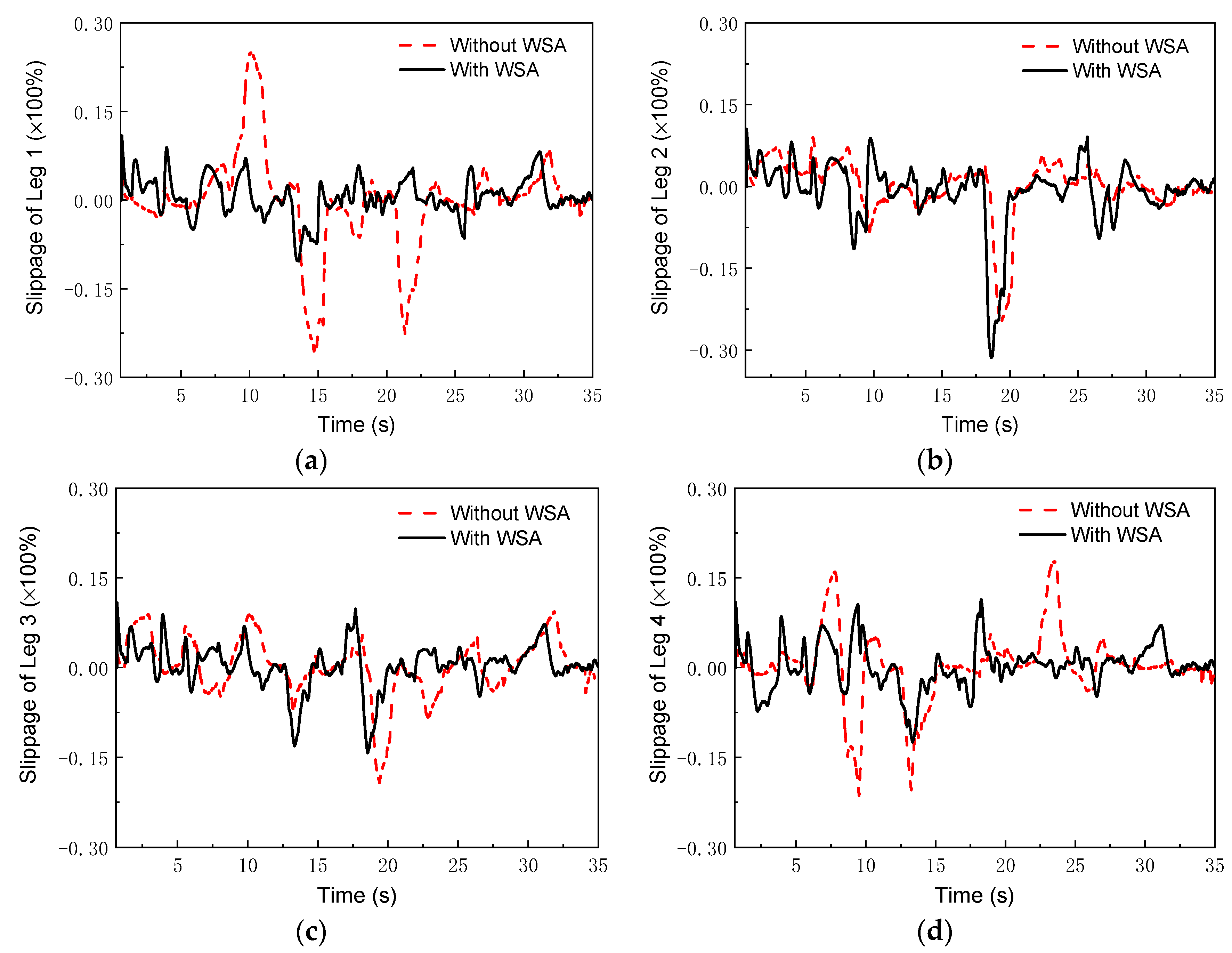
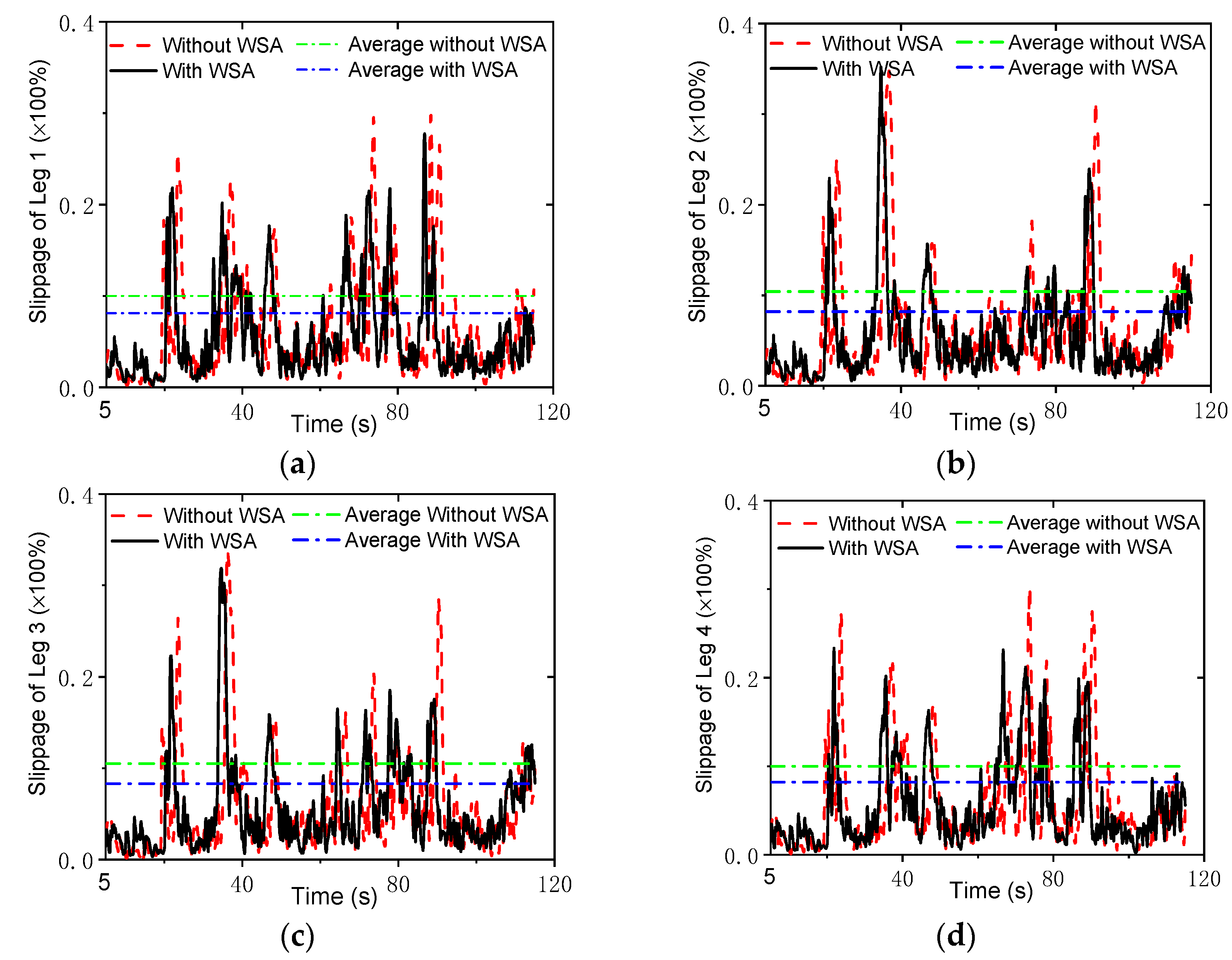
3.4. Wheel Speed Allocation (WSA)
4. Results and Discussion
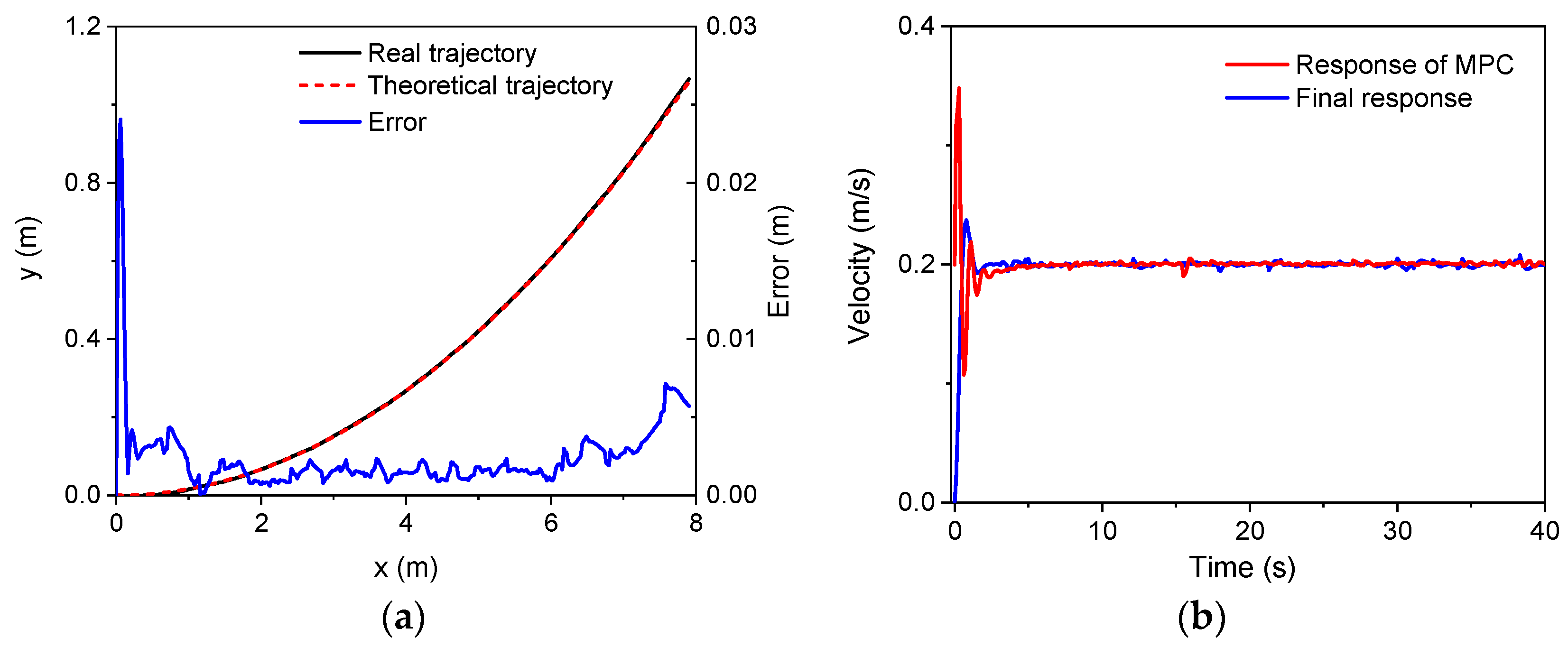
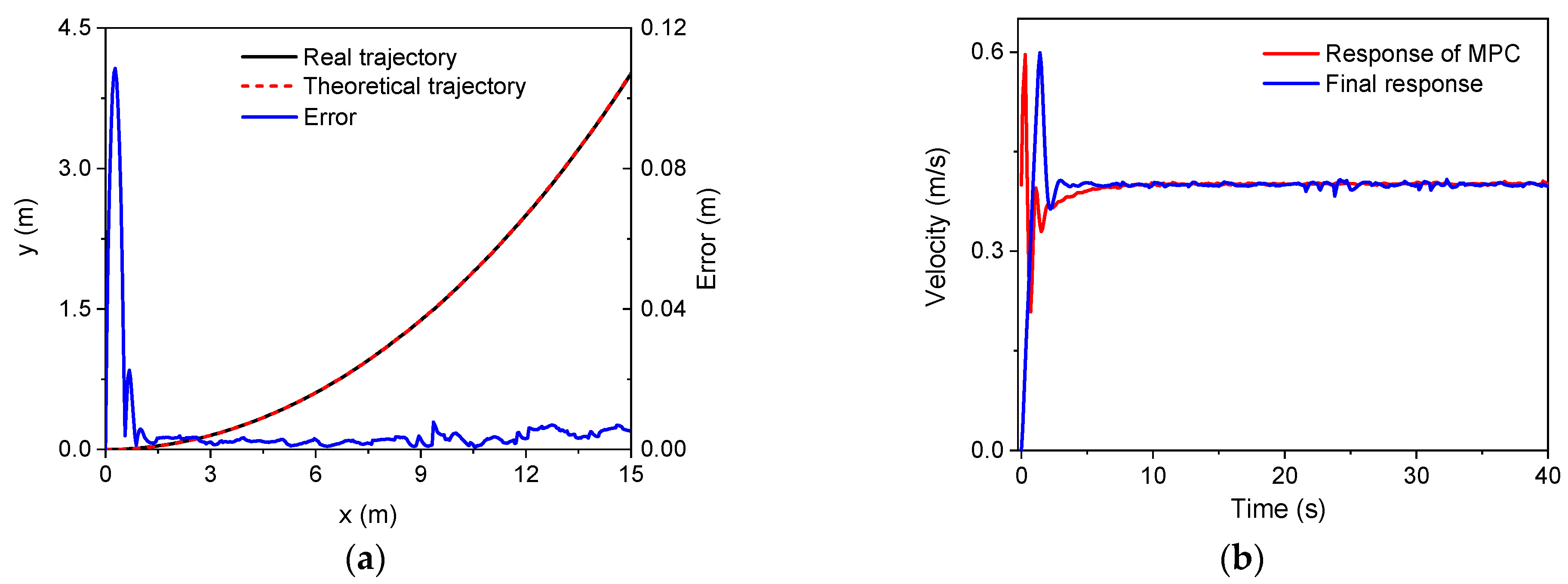
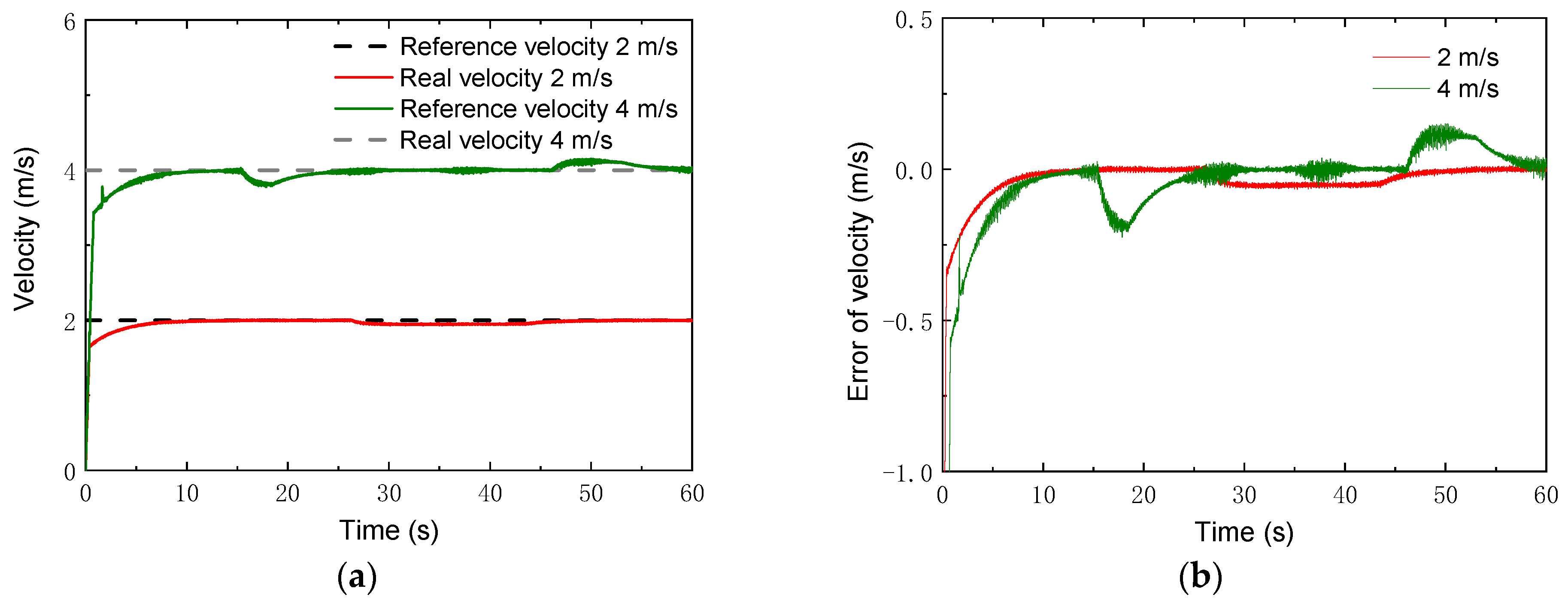
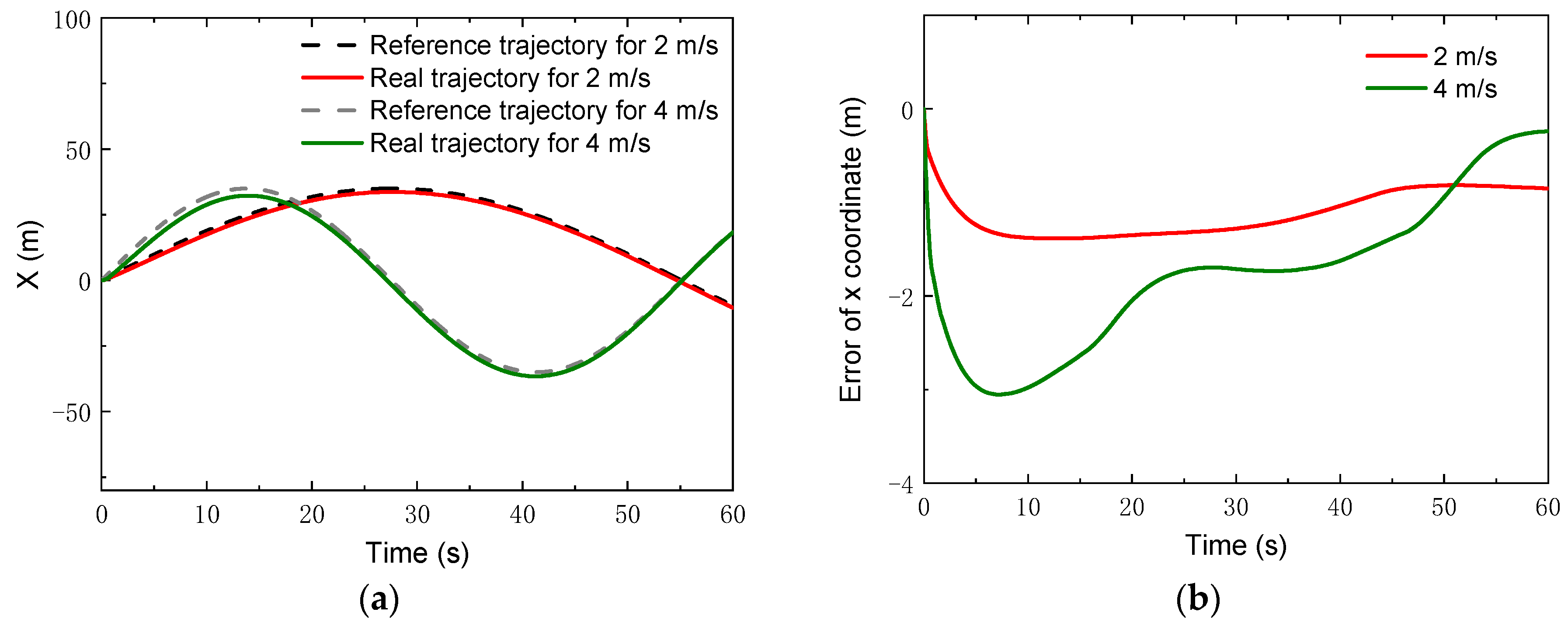
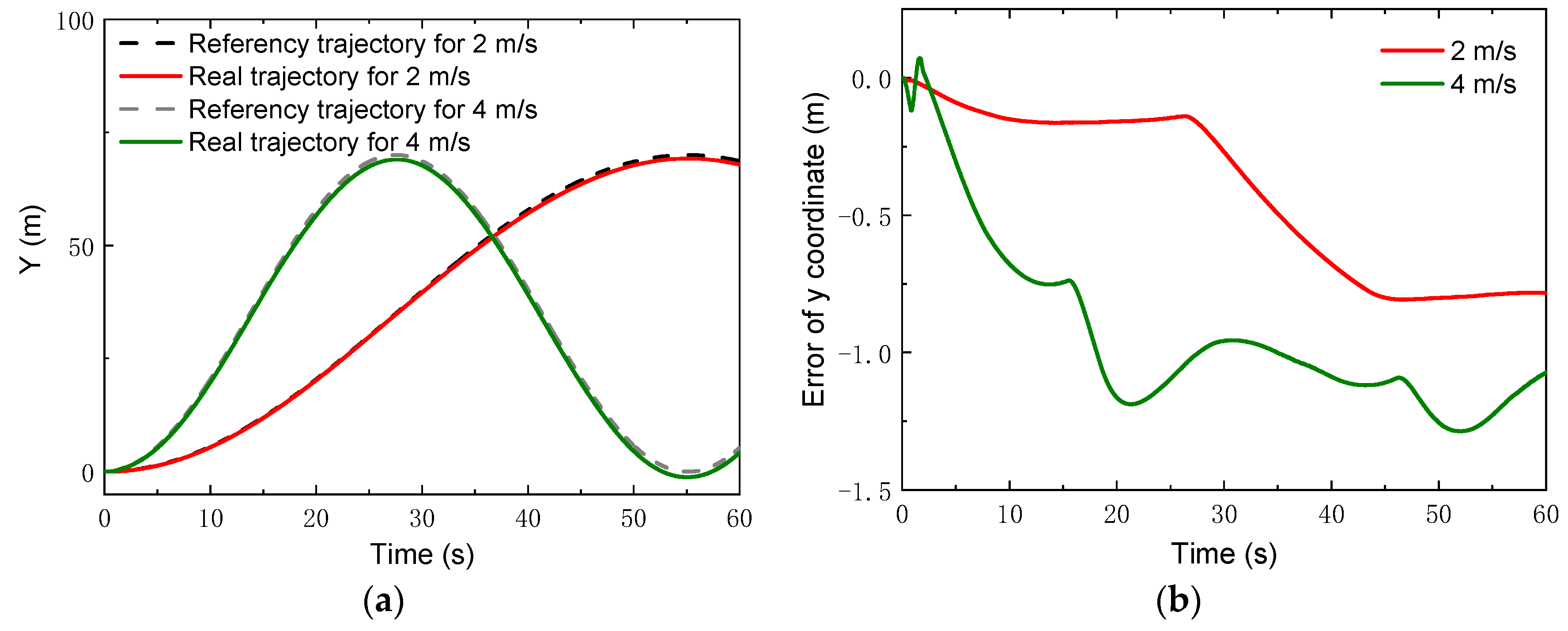
4.1. Simulations
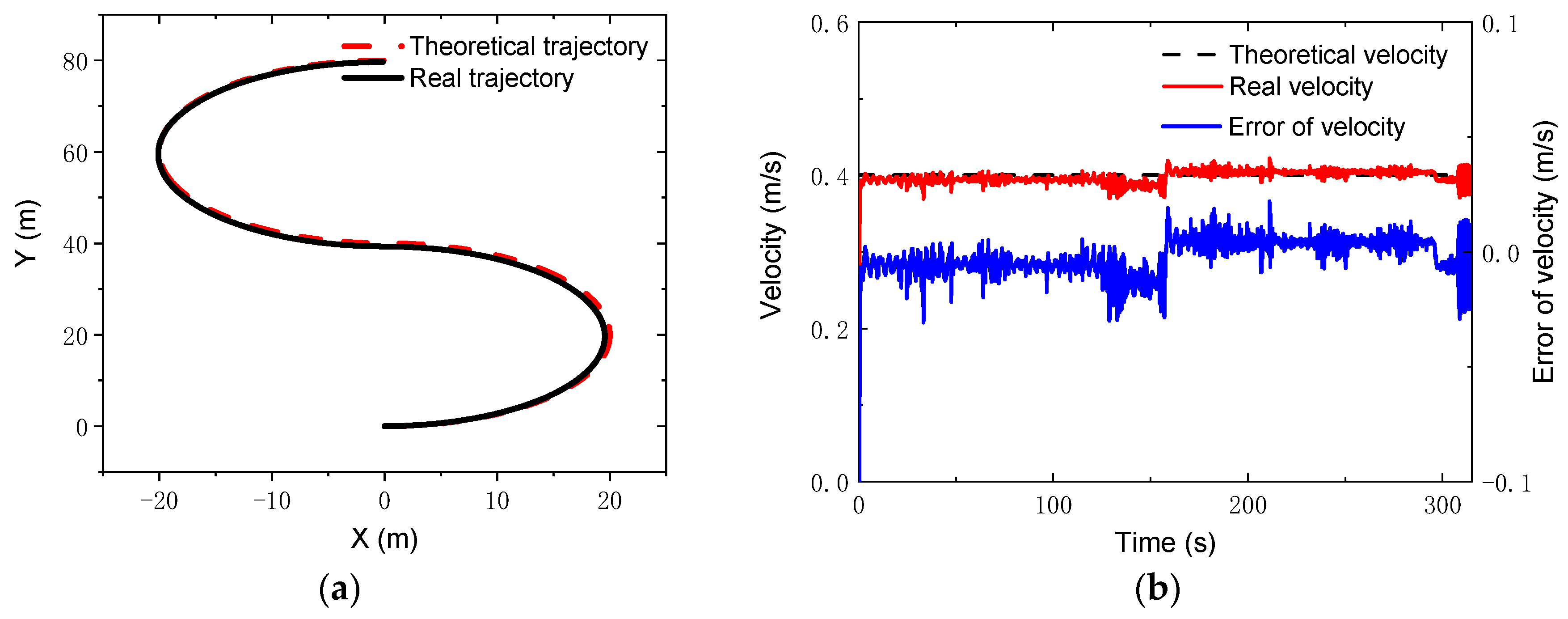
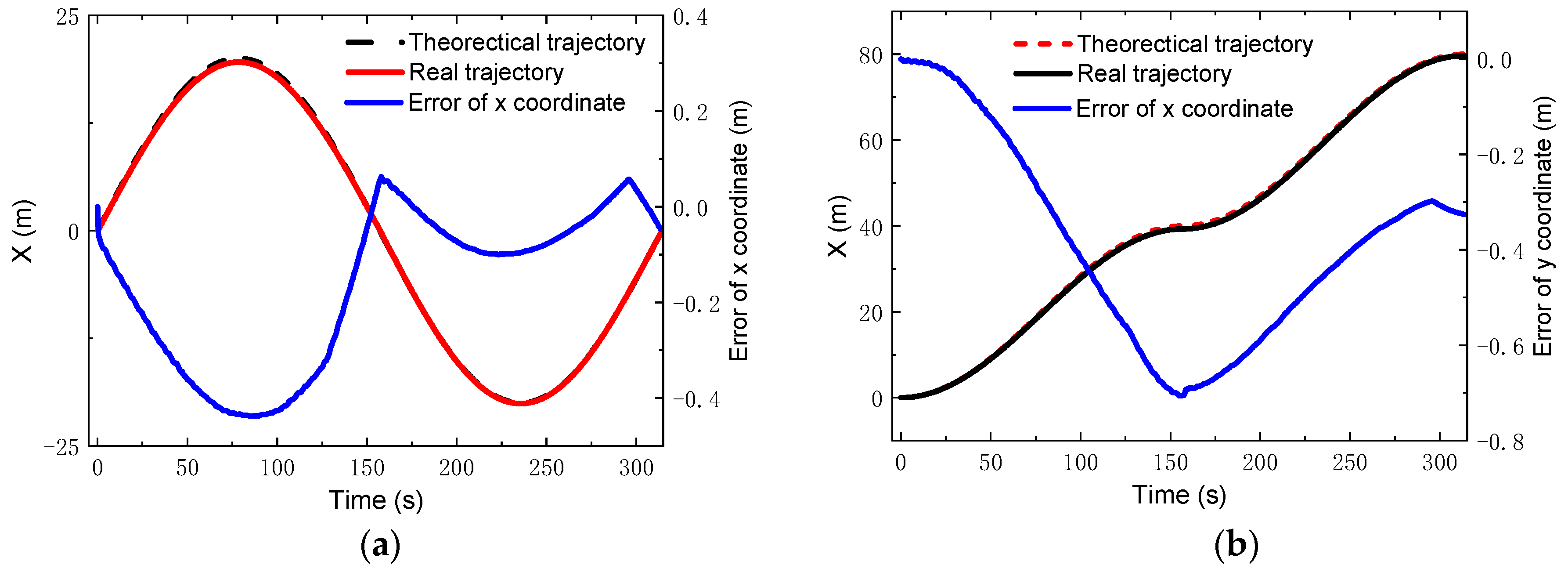
4.2. Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rankin, A.; Maimone, M.; Biesiadecki, J.; Patel, N.; Levine, D.; Toupet, O. Driving curiosity: Mars rover mobility trends during the first seven years. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020. [Google Scholar]
- Dodge, R.; Parsons, D.; Abid, M.; Chrystal, K.; Kartolov, B. Dynamics associated with the Corer on M2020 Perseverance Rover. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 6–13 March 2021. [Google Scholar]
- Zheng, J.; Gao, H.; Yuan, B.; Liu, Z.; Yu, H.; Ding, L.; Deng, Z. Design and terramechanics analysis of a Mars rover utilizing active suspension. Mech. Mach. Theory 2018, 128, 125–149. [Google Scholar] [CrossRef]
- Michaud, F.; Letourneau, D.; Arsenault, M.; Bergeron, Y.; Cadrin, R.; Gagnon, F.; Legault, M.A.; Millette, M.; Paré, J.F.; Tremblay, M.C.; et al. Multi-modal locomotion robotic platform using leg-track-wheel articulations. Auton. Robots 2005, 18, 137–156. [Google Scholar] [CrossRef]
- Hauser, K.; Bretl, T.; Latombe, J.C.; Harada, K.; Wilcox, B. Motion Planning for Legged Robots on Varied Terrain. Int. J. Robot. Res. 2008, 27, 1325–1349. [Google Scholar] [CrossRef]
- Grand, C.; Benamar, F.; Plumet, F.; Bidaud, P. Stability and traction optimization of a reconfigurable wheel-legged robot. Int. J. Robot. Res. 2004, 23, 1041–1058. [Google Scholar] [CrossRef]
- Smith, J.A.; Poulakakis, I.; Trentini, M.; Sharf, I. Bounding with active wheels and liftoff angle velocity adjustment. Int. J. Robot. Res. 2010, 29, 414–427. [Google Scholar] [CrossRef]
- Xu, K.; Wang, S.; Yue, B.; Wang, J.; Peng, H.; Liu, D.; Chen, Z.; Shi, M. Adaptive impedance control with variable target stiffness for wheel-legged robot on complex unknown terrain. Mechatronics 2020, 69, 102388. [Google Scholar] [CrossRef]
- He, J.; Gao, F. Type Synthesis for bionic quadruped walking robots. J. Biol. Eng. 2015, 12, 527–538. [Google Scholar] [CrossRef]
- He, J.; Gao, F. Mechanism, actuation, perception, and control of highly dynamic multi-legged robots: A Review. Chin. J. Mech. Eng. 2020, 33, 79. [Google Scholar] [CrossRef]
- Lewinger, W.A.; Harley, C.M.; Ritzmann, R.E.; Branicky, M.S.; Quinn, R.D. Insect-like antennal sensing for climbing and tunneling behavior in a biologically-inspired mobile robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005. [Google Scholar]
- Daltorio, K.A.; Wei, T.E.; Gorb, S.N.; Ritzmann, R.E.; Quinn, R.D. Passive foot design and contact area analysis for climbing mini-whegs. In Proceedings of the IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007. [Google Scholar]
- Chen, S.C.; Huang, K.J.; Chen, W.H.; Shen, S.Y.; Li, C.H.; Lin, P.C. Quattroped: A leg–wheel transformable robot. IEEE/ASME Trans. Mechantron. 2014, 19, 730–742. [Google Scholar] [CrossRef]
- Kim, Y.S.; Jung, G.P.; Kim, H.; Cho, K.J.; Chu, C.N. Wheel transformer: A wheel-leg hybrid robot with passive transformable wheels. IEEE Trans. Robot. 2014, 30, 1487–1498. [Google Scholar] [CrossRef]
- Chen, W.H.; Lin, H.S.; Lin, Y.M.; Lin, P.C. TurboQuad: A novel leg–wheel transformable robot with smooth and fast behavioral transitions. IEEE Trans. Robot. 2017, 33, 1025–1040. [Google Scholar] [CrossRef]
- Kim, Y.; Lee, Y.; Lee, S.; Kim, J.; Kim, H.S.; Seo, T. STEP: A new mobile platform with 2-DOF transformable wheels for service robots. IEEE/ASME Trans. Mechantron. 2020, 25, 1859–1868. [Google Scholar] [CrossRef]
- Sun, T.; Xiang, X.; Su, W.; Wu, H.; Song, Y. A transformable wheel-legged mobile robot: Design, analysis and experiment. Robot. Auton. Syst. 2017, 98, 30–41. [Google Scholar] [CrossRef]
- Grotzinger, J.P.; Crisp, J.; Vasavada, A.R.; Anderson, R.C.; Baker, C.J.; Barry, R.; Blake, D.F.; Conrad, P.; Edgett, K.S.; Ferdowski, B.; et al. Mars science laboratory mission and science investigation. Space Sci. Rev. 2012, 170, 5–56. [Google Scholar] [CrossRef] [Green Version]
- Cordes, F.; Kirchner, F.; Babu, A. Design and field testing of a rover with an actively articulated suspension system in a Mars analog terrain. J. Field Robot. 2018, 35, 1149–1181. [Google Scholar] [CrossRef]
- Lamon, P. 3D-position tracking and control for all-terrain robots. Adv. Robot. 2008, 43, 33–51. [Google Scholar]
- Chwa, D. Robust distance-based tracking control of wheeled mobile robots using vision sensors in the presence of kinematic disturbances. IEEE Trans. Ind. Electron. 2016, 63, 6172–6183. [Google Scholar] [CrossRef]
- Liang, Z.; Chen, J.; Wang, Y. Equivalent acceleration imitation for single wheel of manned lunar rover by varying torque on earth. IEEE/ASME Trans. Mechatron. 2019, 25, 282–293. [Google Scholar] [CrossRef]
- Krid, M.; Amar, F.B. A dynamic based path tracking controller for a fast rover with independent steering and drive. In Proceedings of the CLAWAR 2011, Paris, France, 6–8 September 2011. [Google Scholar]
- Yang, H.; Zhao, H.; Xia, Y.; Zhang, J. Nonlinear MPC with time-varying terminal cost for tracking unreachable periodic references. Automatica 2021, 123, 109337. [Google Scholar] [CrossRef]
- Liu, X.; Wang, W.; Li, X.; Liu, F.; He, Z.; Yao, Y.; Ruan, H.; Zhang, T. MPC-based high-speed trajectory tracking for 4WIS robot. ISA Trans. 2022, 123, 413–424. [Google Scholar] [CrossRef]
- Ding, T.; Zhang, Y.; Ma, G.; Cao, Z.; Zhao, X.; Tao, B. Trajectory tracking of redundantly actuated mobile robot by MPC velocity control under steering strategy constraint. Mechatronics 2022, 84, 102779. [Google Scholar] [CrossRef]
- Sun, Y.L.; He, J.; Xing, Y. Multi-target coordinated control of wheel-legged Mars rover. Acta Aeronutica Astronaut. Sin. 2021, 42, 524246. [Google Scholar]
- Li, W.; Ding, L.; Gao, H.; Tavakoli, M. Haptic tele-driving of wheeled mobile robots under nonideal wheel rolling, kinematic control and communication time delay. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 336–347. [Google Scholar] [CrossRef]
- Chen, C.; Shu, M.; Wang, Y.; Ding, L.; Gao, H.; Liu, H.; Zhou, S. Simultaneous control of trajectory tracking and coordinated allocation of rocker-bogie planetary rovers. Mech. Syst. Signal Proc. 2021, 151, 107312. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| θi | di | αi | ai | |
|---|---|---|---|---|
| 1 | θ1 | 0 | π/2 | 0 |
| 2 | θ2 | 0 | −π/2 | L1 = 87.5 |
| 3 | θ3 | 0 | 0 | L2 = 350 |
| 4 | θ4 | 0 | 0 | L3 = 310 |
| Categories | Terminology | Definition |
|---|---|---|
| Input parameters | Points on reference path | |
| Desired yaw angle of body | ||
| Desired linear and angular velocities of body | ||
| Control parameters | Np, Nc | Prediction and control horizons |
| Weight coefficient and the relaxation factor | ||
| kp1, ki1, kd1 | PID parameters for control of the linear velocity of body | |
| kp2, ki2, kd2 | PID parameters for control of the angular velocity of body | |
| Output parameters | The linear and angular velocities of the body | |
| Steering angles | ||
| . | Rotational speeds of the wheel motors |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, J.; Sun, Y.; Yang, L.; Gao, F. Model Predictive Control of a Novel Wheeled–Legged Planetary Rover for Trajectory Tracking. Sensors 2022, 22, 4164. https://doi.org/10.3390/s22114164
He J, Sun Y, Yang L, Gao F. Model Predictive Control of a Novel Wheeled–Legged Planetary Rover for Trajectory Tracking. Sensors. 2022; 22(11):4164. https://doi.org/10.3390/s22114164
Chicago/Turabian StyleHe, Jun, Yanlong Sun, Limin Yang, and Feng Gao. 2022. "Model Predictive Control of a Novel Wheeled–Legged Planetary Rover for Trajectory Tracking" Sensors 22, no. 11: 4164. https://doi.org/10.3390/s22114164
APA StyleHe, J., Sun, Y., Yang, L., & Gao, F. (2022). Model Predictive Control of a Novel Wheeled–Legged Planetary Rover for Trajectory Tracking. Sensors, 22(11), 4164. https://doi.org/10.3390/s22114164