
Fiber Bragg Grating-Based Smart Garment for Monitoring Human Body Temperature

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
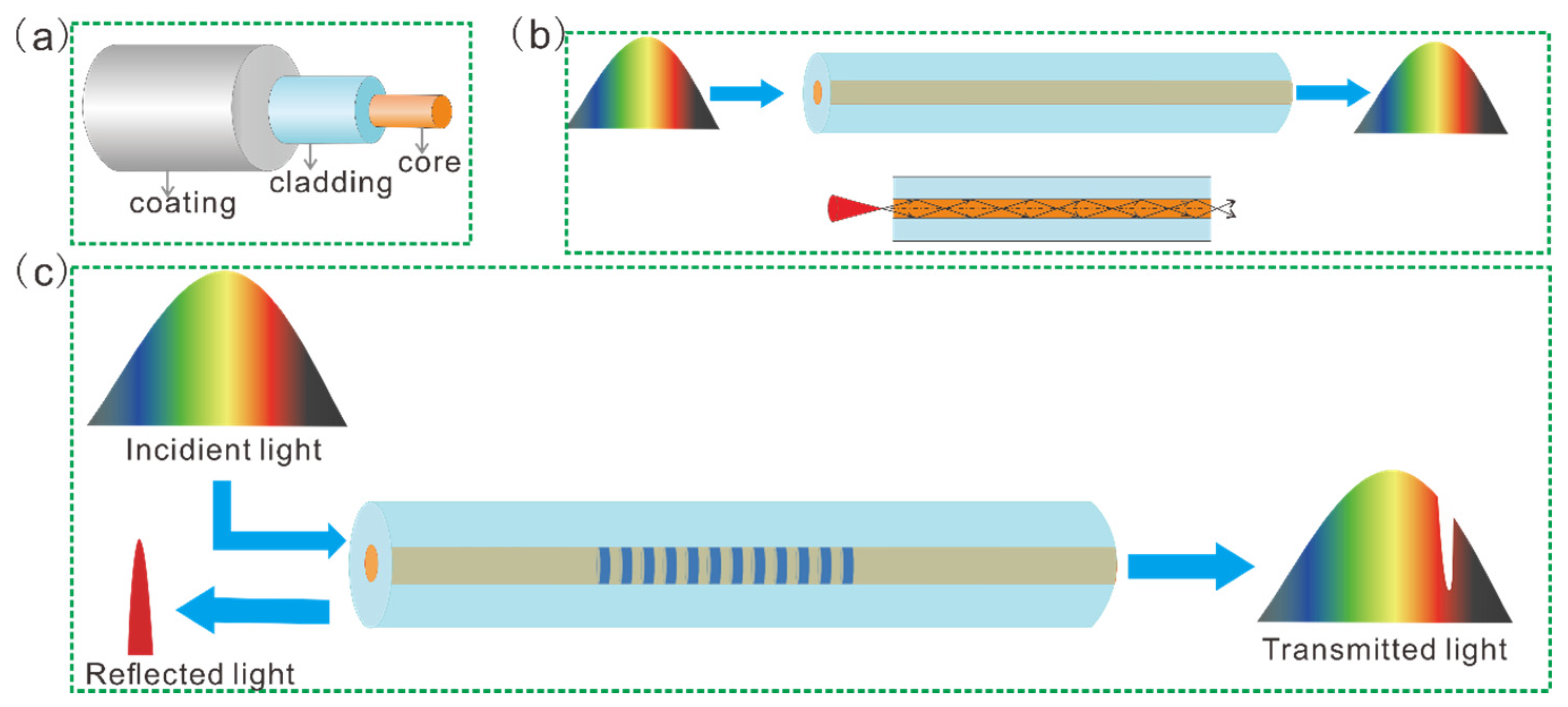
2. Basics of Light Transmission in Optical Fibers and FBG Sensing
3. FBG Temperature Sensor Fabrication and Sensing Performance Test
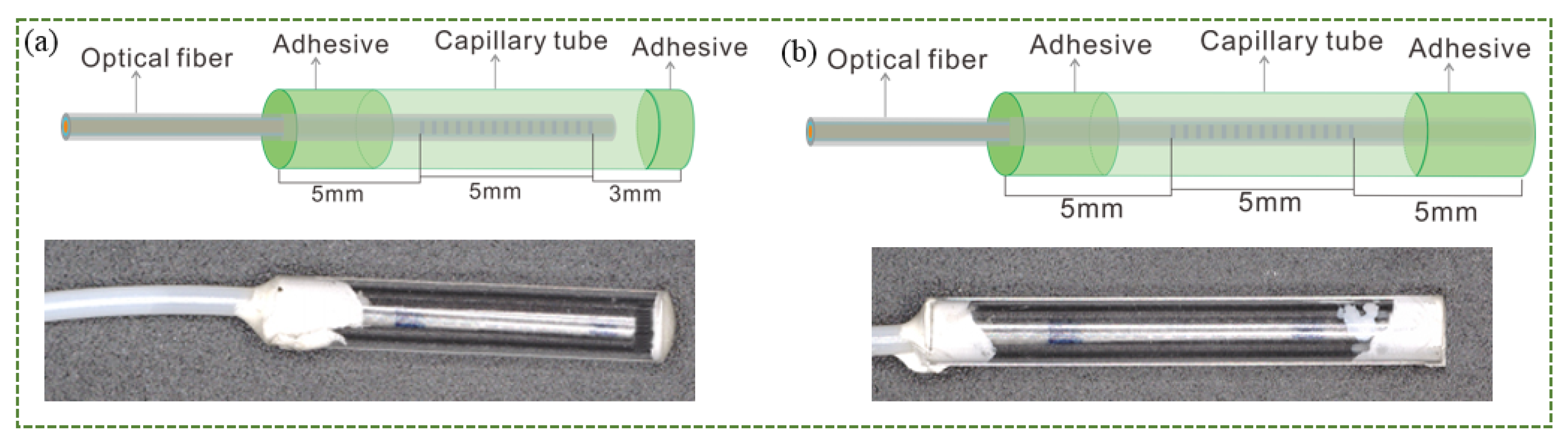
3.1. Sensor Design and Encapsulation
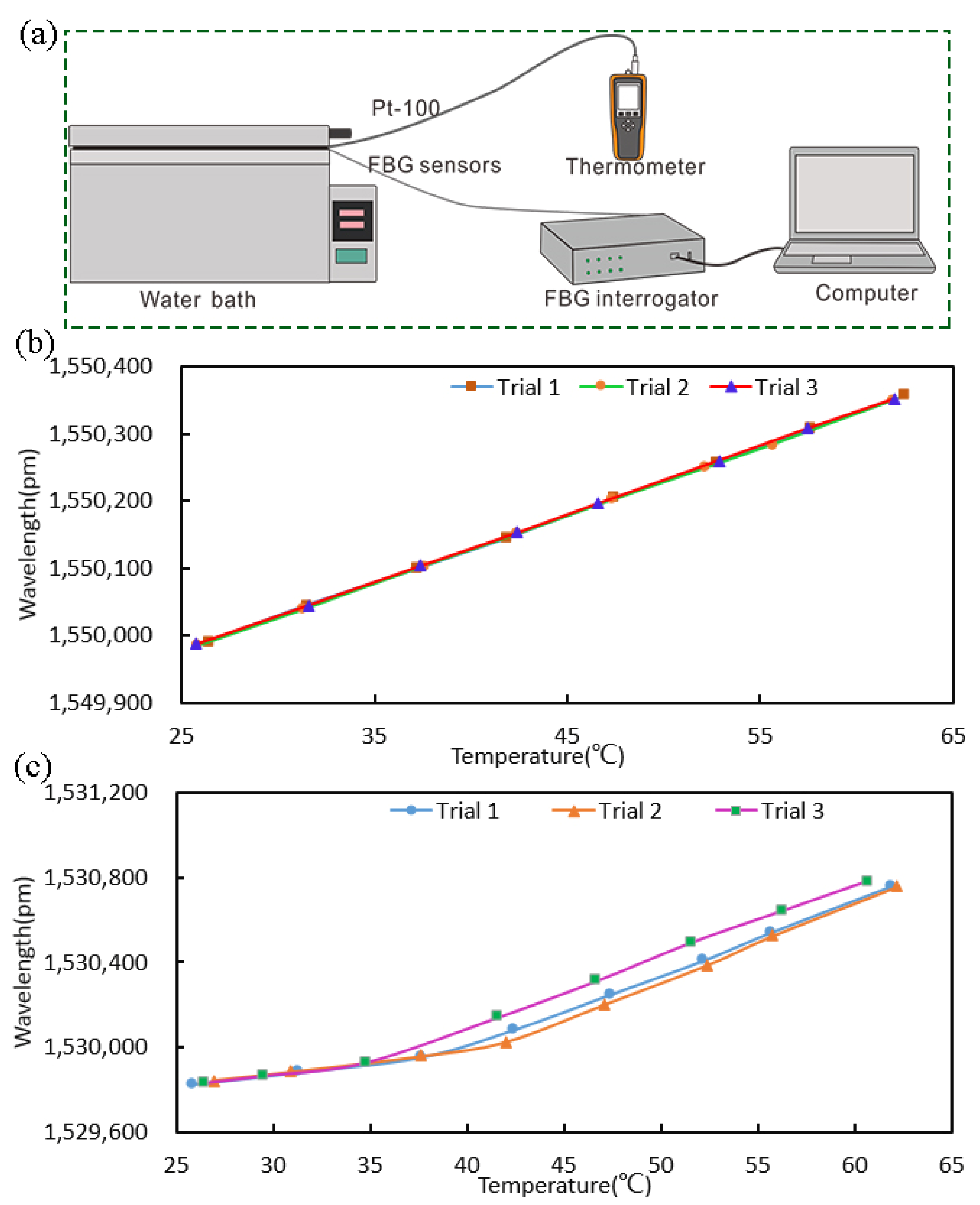
3.2. Calibration Experiment of Sensor
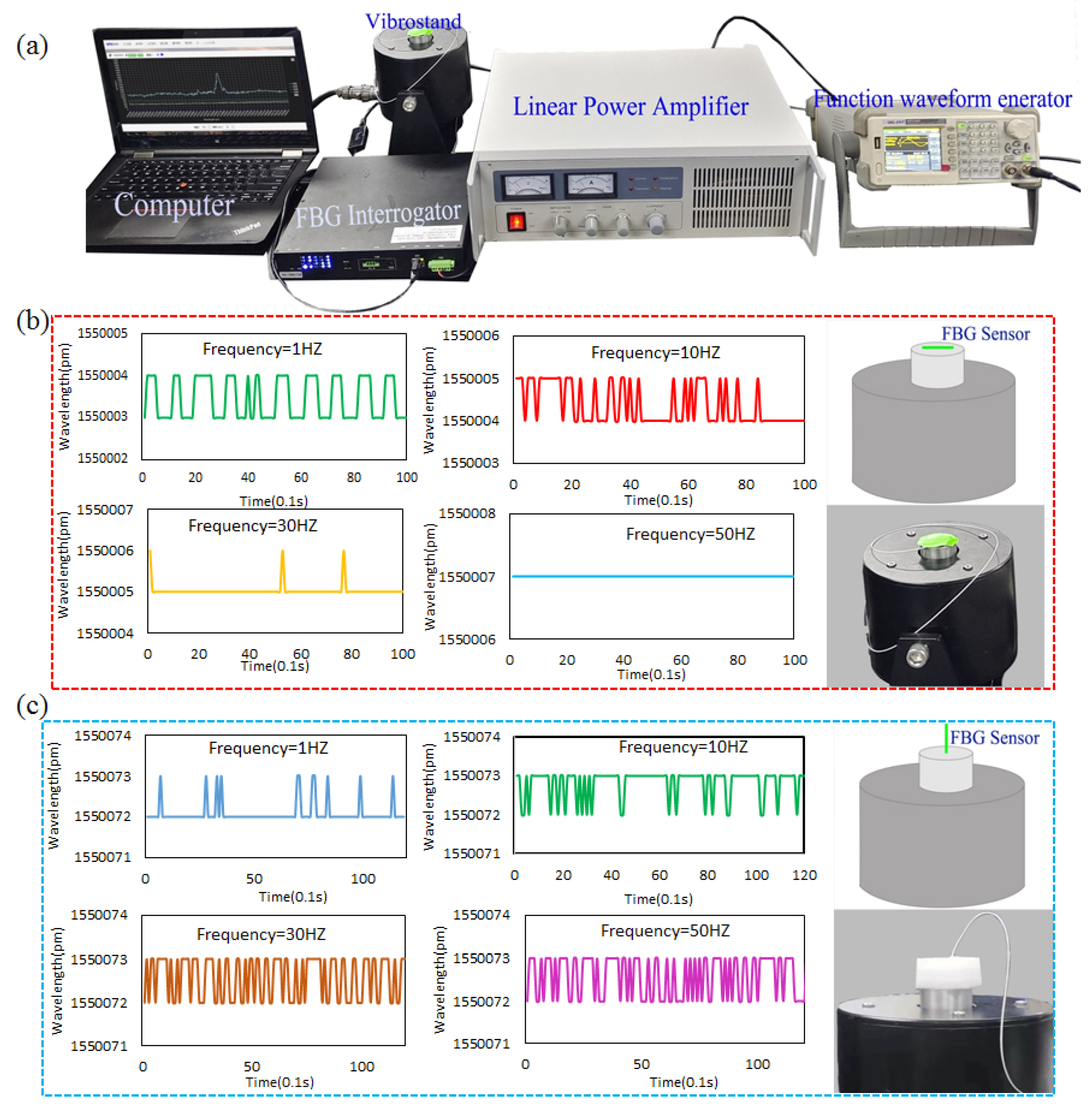
3.3. Anti-Vibration Performance Test of FBG Sensor
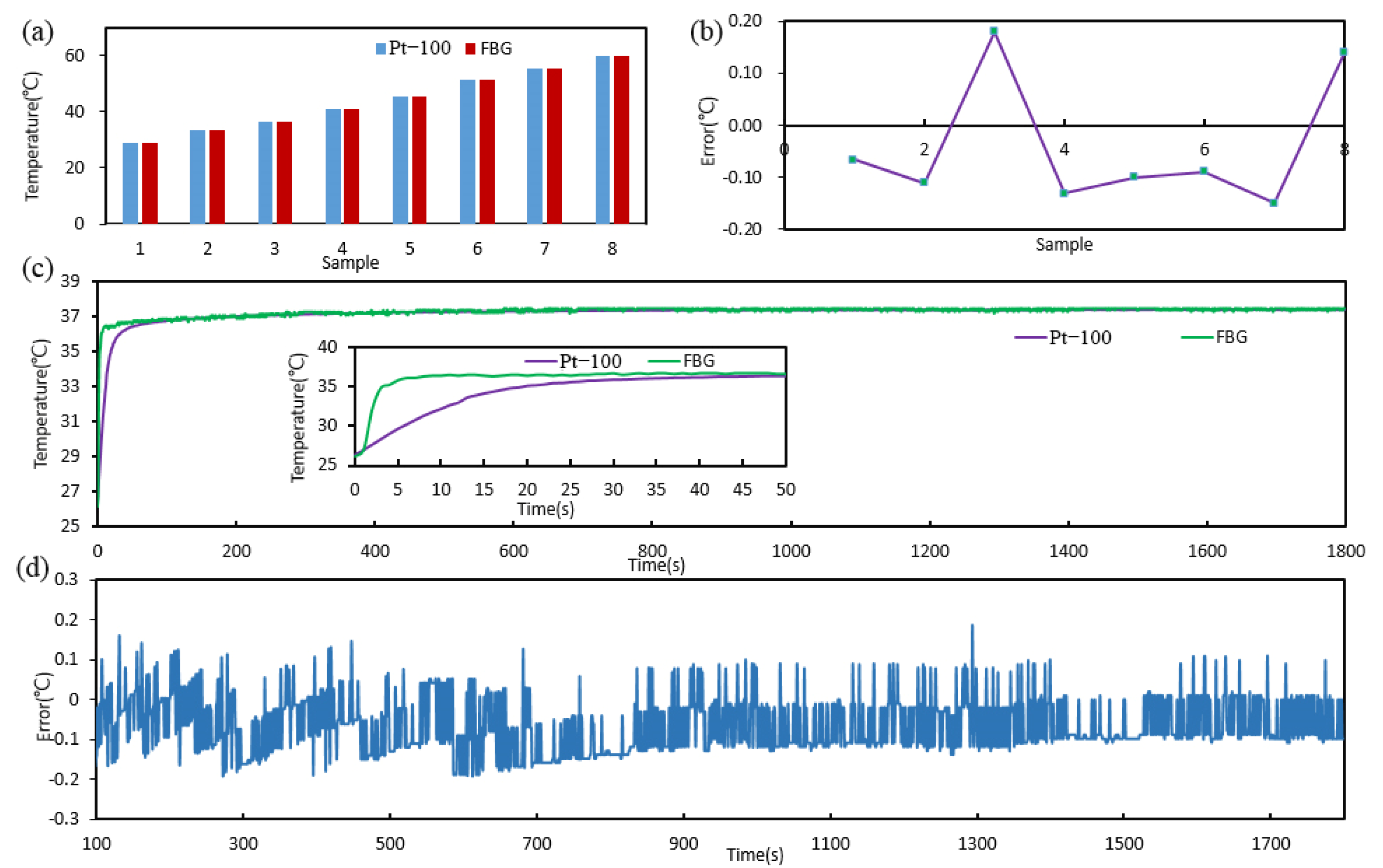
3.4. Temperature Calibration Verification
4. Integration of Sensor and Garment
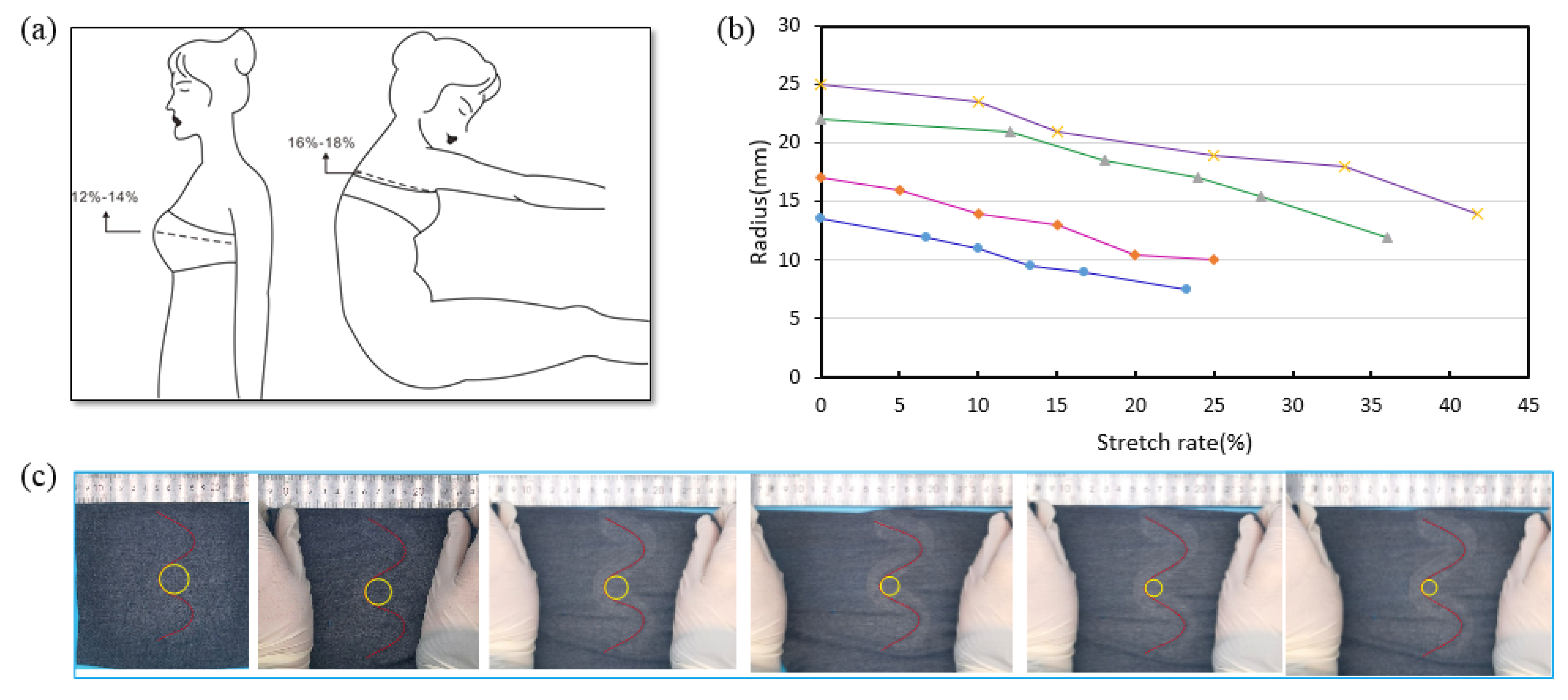
4.1. Integration Design
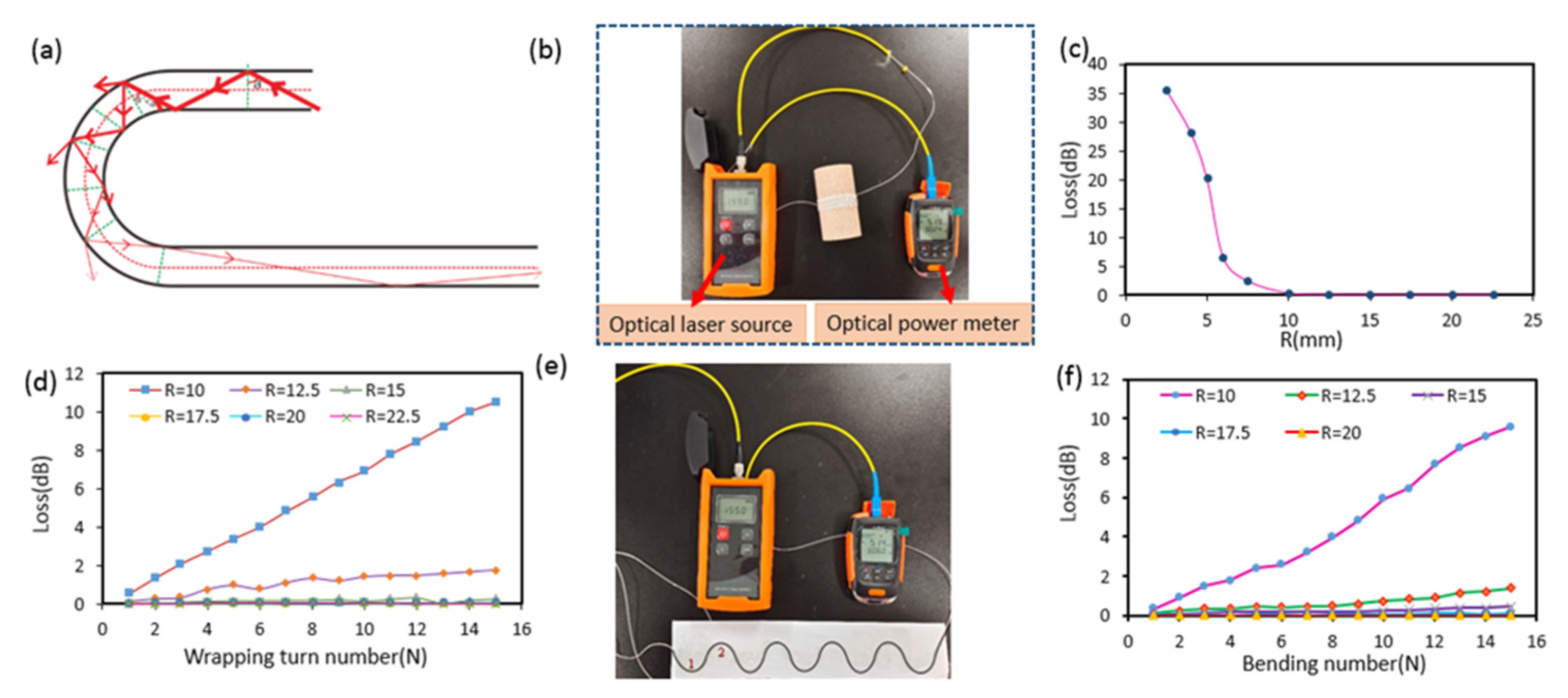
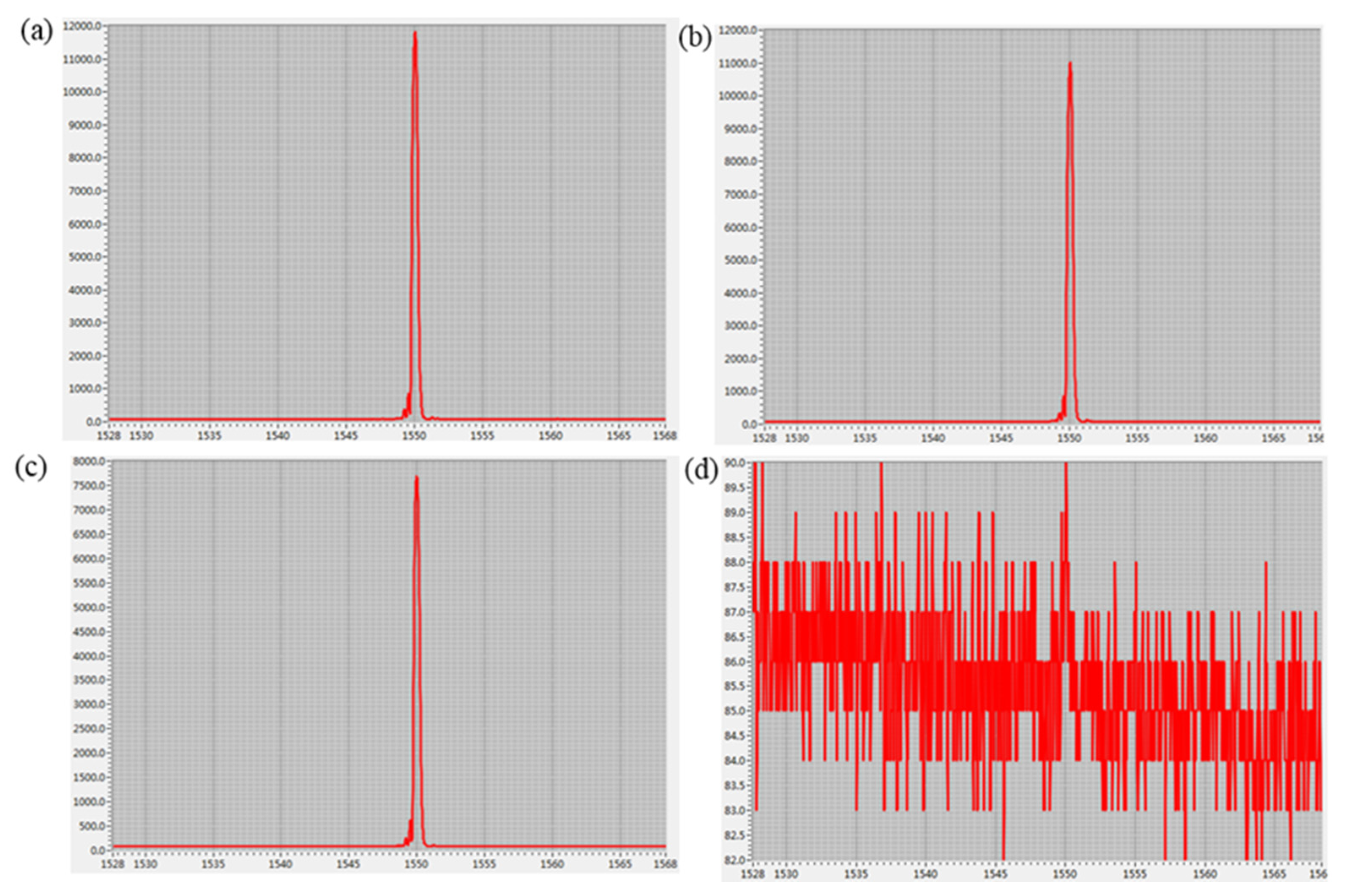
4.2. Optimizing the Path of Optical Fiber
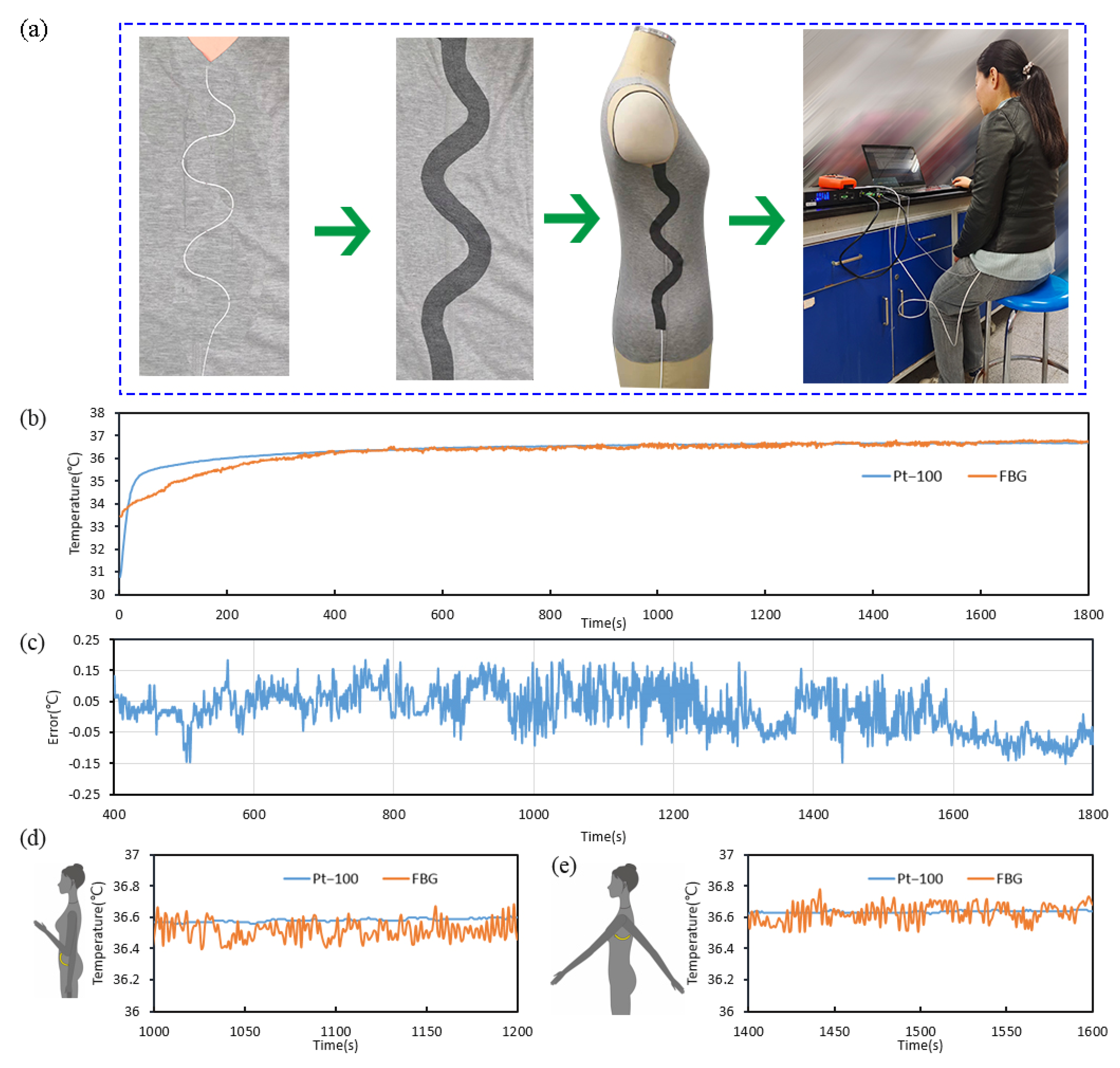
4.3. Body Temperature Monitoring Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khan, Y.; Ostfeld, A.E.; Lochner, C.M.; Pierre, A.; Arias, A.C. Monitoring of vital signs with flexible and wearable medical devices. Adv. Mater. 2016, 28, 4373–4395. [Google Scholar] [CrossRef] [PubMed]
- Husain, M.D.; Naqvi, S.; Atalay, O. Measuring human body temperature through temperature sensing fabric. AATCC J. Res. 2016, 3, 1–12. [Google Scholar] [CrossRef]
- Su, Y.; Ma, C.S.; Chen, J.; Wu, H.P.; Luo, W.X.; Peng, Y.M.; Luo, Z.B.; Li, L.; Tan, Y.S.; Omisore, O.M. Printable, highly sensitive flexible temperature sensors for human body temperature monitoring: A review. Nanoscale Res. Lett. 2020, 15, 200. [Google Scholar] [CrossRef] [PubMed]
- Hughes-Riley, T.; Jobling, P.; Dias, T.; Faulkner, S.H. An investigation of temperature-sensing textiles for temperature monitoring during sub-maximal cycling trials. Text. Res. J. 2021, 91, 624–645. [Google Scholar] [CrossRef]
- Krebber, K. Smart technical textiles based on fiber optic sensors. In Current Developments in Optical Fiber Technology; InTech: Rijeka, Croatia, 2013; pp. 319–344. [Google Scholar]
- Carlo, M.; Paola, S.; Emiliano, S. Medical smart textiles based on fiber optic technology: An overview. J. Funct. Biomater. 2015, 6, 204–221. [Google Scholar]
- Liu, Z.Y.; Zhang, Z.F.; Tam, W.Y.; Tao, X.M. Multifunctional smart optical fibers: Materials, fabrication, and sensing applications. Photonics 2019, 6, 48. [Google Scholar] [CrossRef] [Green Version]
- Roriz, P.; Silva, S.; Frazao, O.; Novais, S. Optical fiber temperature sensors and their biomedical applications. Sensors 2020, 20, 2113. [Google Scholar] [CrossRef] [Green Version]
- Dziuda, L.; Skibniewski, F.W.; Krej, M.; Lewandowski, J. Monitoring respiration and cardiac activity using fiber Bragg grating-based sensor. IEEE Trans. Biomed. Eng. 2012, 59, 1934–1941. [Google Scholar] [CrossRef]
- Dziuda, L.; Skibniewski, F.W.; Krej, M.; Baran, P.M. Fiber Bragg grating-based sensor for monitoring respiration and heart activity during magnetic resonance imaging examinations. J. Biomed. Opt. 2013, 18, 057006. [Google Scholar] [CrossRef] [Green Version]
- Fajkus, M.; Nedoma, J.; Martinek, R.; Novak, M.; Jargus, J.; Vasinek, V. Fiber optic sensor encapsulated in polydimethylsiloxane for heart rate monitoring. Proc. SPIE 2017, 10208, 102080W. [Google Scholar]
- Subbarao, G.P.A.; Narasipur, O.S.; Kalegowda, A.; Asokan, S. A novel fiber Bragg grating based sensing methodology for direct measurement of surface strain on body muscles during physical exercises. Int. J. Optomechatron. 2012, 6, 189–198. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.B.; Jung, Y.J.; Choi, H.K.; Sohn, I.B.; Lee, J.H. Hybrid LPG-FBG based high-resolution micro bending strain sensor. Sensors 2020, 21, 22. [Google Scholar] [CrossRef] [PubMed]
- Katsuragawa, Y.; Ishizawa, H. Non-invasive blood pressure measurement by pulse wave analysis using FBG sensor. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Pisa, Italy, 11–14 May 2015; pp. 511–515. [Google Scholar]
- Kumar, N.V.; Pant, S.; Sridhar, S.; Marulasiddappa, V.; Srivatzen, S.; Asokan, S. Fiber Bragg grating-based pulse monitoring device for real-time non-invasive blood pressure measurement—A feasibility study. IEEE Sens. J. 2021, 21, 9179–9185. [Google Scholar] [CrossRef]
- Witt, J.; Narbonneau, F.; Schukar, M.; Krebber, K.; De Jonckheere, J.; Jeanne, M.; Kinet, D.; Paquet, B.; Depré, A.; D’Angelo, L.T.; et al. Medical textiles with embedded fiber optic sensors for monitoring of respiratory movement. IEEE Sens. J. 2012, 12, 246–254. [Google Scholar] [CrossRef]
- Manujlo, A.; Osuch, T. Temperature fiber Bragg grating based sensor for respiration monitoring. Proc. SPIE 2017, 10445, 104451A. [Google Scholar]
- Dziuda, L.; Skibniewski, F.W. A new approach to ballistocardiographic measurements using fibre Bragg grating-based sensors. Biocybern. Biomed. Eng. 2014, 34, 101–116. [Google Scholar] [CrossRef]
- Umesh, S.; Padma, S.; Srinivas, T.; Asokan, S. Fiber Bragg grating goniometer for joint angle measurement. IEEE Sens. J. 2018, 18, 216–222. [Google Scholar] [CrossRef]
- Abro, Z.A.; Zhang, Y.F.; Chen, N.L.; Hong, C.Y.; Lakho, R.A.; Halepoto, H. A novel flex sensor-based flexible smart garment for monitoring body postures. J. Ind. Text. 2019, 49, 262–274. [Google Scholar] [CrossRef]
- Abro, Z.A.; Hong, C.Y.; Chen, N.L.; Zhang, Y.F.; Lakho, R.A.; Yasin, S. A fiber Bragg grating-based smart wearable belt for monitoring knee joint postures. Text. Res. J. 2019, 90, 386–394. [Google Scholar] [CrossRef]
- Hong, C.Y.; Abro, Z.A.; Zhang, Y.F.; Lakho, R.A. An FBG-based smart wearable ring fabricated using FDM for monitoring body joint motion. J. Ind. Text. 2021, 50, 1660–1673. [Google Scholar]
- Suresh, R.; Bhalla, S.; Hao, J.; Singh, C. Development of a high resolution plantar pressure monitoring pad based on fiber Bragg grating (FBG) sensors. Technol. Health Care 2015, 23, 785–794. [Google Scholar] [CrossRef] [PubMed]
- Liang, T.C.; Lin, J.J.; Guo, L.Y. Plantar pressure detection with fiber Bragg gratings sensing system. Sensors 2016, 16, 1766. [Google Scholar] [CrossRef] [PubMed]
- Vilarinho, D.; Theodosiou, A.; Leitao, C.; Leal, A.G.; Domingues, M.D.; Kalli, K.; Andre, P.; Antunes, P.; Marques, C. POFBG-embedded cork insole for plantar pressure monitoring. Sensors 2017, 17, 2924. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Leal, A.G.; Domingues, M.F.; Min, R.; Vilarinho, D.; Theodosiou, A.; Tavares, C.; Alberto, N.; Leitao, C.; Grammont, F. Fiber Bragg based sensors for foot plantar pressure analysis. In Biomedical Engineering Systems and Technologies, Proceedings of the International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2018), Madeira, Portugal, 19–21 January 2018; Springer: Cham, Switzerland, 2019; Volume 1024, pp. 3–25. [Google Scholar]
- Lakho, R.A.; Zhang, Y.F.; Jiang, J.H.; Hong, C.Y.; Abro, Z.A. A smart insole for monitoring plantar pressure based on the fiber Bragg grating sensing technique. Text. Res. J. 2019, 89, 3433–3446. [Google Scholar] [CrossRef]
- Ghosh, S.; Amidei, C.; Furrow, K. Development of a sensor-embedded flexible textile structure for apparel or large area applications. Indian J. Fibre Text. 2005, 30, 42–48. [Google Scholar]
- Li, H.Q.; Yang, H.J.; Li, E.B.; Liu, Z.H.; Wang, K.J. Wearable sensors in intelligent clothing for measuring human body temperature based on optical fiber Bragg grating. Opt. Express 2012, 20, 11740. [Google Scholar] [CrossRef] [Green Version]
- Hill, K.O.; Fujii, Y.; Johnson, D.C.; Kawasaki, B.S. Photosensitivity in optical fiber waveguides Application to reflection filter fabrication. Appl. Phys. Lett. 1978, 32, 647–649. [Google Scholar] [CrossRef]
- Morey, W.W.; Meltz, G.; Glenn, W.H. Fiber optic Bragg grating sensors. Proc. SPIE 1990, 1169, 98–107. [Google Scholar]
- Othonos, A.; Kalli, K. Fiber Bragg Gratings: Fundamentals and Applications in Telecommunications and Sensing; Artech House Publishers: Boston, MA, USA, 1999; pp. 1–112. [Google Scholar]
- Tahir, B.A.; Ali, J.; Rahman, R.A. Fabrication of fiber grating by phase mask and its sensing application. J. Optoelectron. Adv. Mater. 2006, 8, 1604–1609. [Google Scholar]
- Hunt, A.P.; Stewart, I.B. Calibration of an ingestible temperature sensor. Physiol. Meas. 2008, 29, N71–N78. [Google Scholar] [CrossRef]
- Ma, B.; Sun, Y.C. Research on real-time monitoring of human body temperature based on fiber Bragg grating sensing technology. In Proceedings of the International Conference on Cloud Computing and Security, Haikou, China, 8–10 June 2018; Volume 11064, pp. 124–133. [Google Scholar]
- Samset, E.; Mala, T.; Ellingsen, R.; Gladhaug, I.; Soreide, O.; Fosse, E. Temperature measurement in soft tissue using a distributed fibre Bragg-grating sensor system. Minim. Invasive Ther. Allied Technol. 2001, 10, 89–93. [Google Scholar] [CrossRef] [PubMed]
- ISO 2631-1:1997; Mechanical Vibration and Shock—Evaluation of Human Exposure to Whole-Body Vibration—Part 1: General Requirement. International Organization for Standardization: Beijing, China, 1997; pp. 1–6.
- Marcuse, D. Curvature loss formula for optical fibers. J. Opt. Soc. Am. 1976, 66, 216–220. [Google Scholar] [CrossRef]
- Faustini, L.; Martini, G. Bend loss in single-mode fibers. J. Lightwave Technol. 1997, 15, 671–679. [Google Scholar] [CrossRef]
- Tsao, S.L.; Cheng, W.M. Simplified formula of bending loss for optical fiber sensors. Fiber Integr. Opt. 2002, 21, 333–344. [Google Scholar] [CrossRef]
- Zendehnam, A.; Mirzaei, M.; Farashiani, A.; Farahani, L.H. Investigation of bending loss in a single-mode optical fibre. Pramana J. Phys. 2010, 74, 591–603. [Google Scholar] [CrossRef]
- Renner, H. Bending losses of coated single-mode fibers: A simple approach. J. Lightwave Technol. 1992, 10, 544–551. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Jiang, Y.; Xu, S.; Liu, H.; Li, X. Fiber Bragg Grating-Based Smart Garment for Monitoring Human Body Temperature. Sensors 2022, 22, 4252. https://doi.org/10.3390/s22114252
Wang X, Jiang Y, Xu S, Liu H, Li X. Fiber Bragg Grating-Based Smart Garment for Monitoring Human Body Temperature. Sensors. 2022; 22(11):4252. https://doi.org/10.3390/s22114252
Chicago/Turabian StyleWang, Xiujuan, Yaming Jiang, Siyi Xu, Hao Liu, and Xiaozhi Li. 2022. "Fiber Bragg Grating-Based Smart Garment for Monitoring Human Body Temperature" Sensors 22, no. 11: 4252. https://doi.org/10.3390/s22114252
APA StyleWang, X., Jiang, Y., Xu, S., Liu, H., & Li, X. (2022). Fiber Bragg Grating-Based Smart Garment for Monitoring Human Body Temperature. Sensors, 22(11), 4252. https://doi.org/10.3390/s22114252