
Task-Oriented Evaluation of the Feasible Kinematic Directional Capabilities for Robot Machining


Abstract
:1. Introduction
2. Materials and Methods
2.1. Manipulability Ellipsoid
2.2. Manipulability Polytope
2.3. Translational and Rotational Manipulability
2.4. Proposed Method
3. Results
3.1. Basic Case Study Formulation
3.2. Generic 3 DOF Planar Manipulator
Path Segment Feasiblity
3.3. Collaborative Robot UR5e
3.3.1. Path Segment Feasiblity
3.3.2. Workspace Analysis
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Costa, G.D.M.; Petry, M.R.; Moreira, A.P. Augmented Reality for Human–Robot Collaboration and Cooperation in Industrial Applications: A Systematic Literature Review. Sensors 2022, 22, 2725. [Google Scholar] [CrossRef] [PubMed]
- Gajšek, B.; Stradovnik, S.; Hace, A. Sustainable Move towards Flexible, Robotic, Human-Involving Workplace. Sustainability 2020, 12, 6590. [Google Scholar] [CrossRef]
- Hwang, P.-J.; Hsu, C.-C.; Chou, P.-Y.; Wang, W.-Y.; Lin, C.-H. Vision-Based Learning from Demonstration System for Robot Arms. Sensors 2022, 22, 2678. [Google Scholar] [CrossRef] [PubMed]
- Khawaja, F.I.; Kanazawa, A.; Kinugawa, J.; Kosuge, K. A Human-Following Motion Planning and Control Scheme for Collaborative Robots Based on Human Motion Prediction. Sensors 2021, 21, 8229. [Google Scholar] [CrossRef] [PubMed]
- Engemann, H.; Du, S.; Kallweit, S.; Cönen, P.; Dawar, H. OMNIVIL—An Autonomous Mobile Manipulator for Flexible Production. Sensors 2020, 20, 7249. [Google Scholar] [CrossRef]
- Himmelsbach, U.B.; Wendt, T.M.; Hangst, N.; Gawron, P.; Stiglmeier, L. Human–Machine Differentiation in Speed and Separation Monitoring for Improved Efficiency in Human–Robot Collaboration. Sensors 2021, 21, 7144. [Google Scholar] [CrossRef]
- Malhan, R.K.; Shembekar, A.V.; Kabir, A.M.; Bhatt, P.M.; Shah, B.; Zanio, S.; Nutt, S.; Gupta, S.K. Automated planning for robotic layup of composite prepreg. Robot. Comput. Manuf. 2020, 67, 102020. [Google Scholar] [CrossRef]
- Kim, J.H.; Choi, K.; Jang, I.G. Model-Predictive-Control-Based Time-Optimal Trajectory Planning of the Distributed Actuation Mechanism Augmented by the Maximum Performance Evaluation. Appl. Sci. 2021, 11, 7513. [Google Scholar] [CrossRef]
- Makhal, A.; Goins, A. Reuleaux: Robot Base Placement by Reachability Analysis. In Proceedings of the 2018 Second IEEE International Conference on Robotic Computing (IRC), Laguna Hills, CA, USA, 31 January–2 February 2018; pp. 137–142. [Google Scholar]
- Zacharias, F.; Borst, C.; Wolf, S.; Hirzinger, G. The capability map: A tool to analyze robot arm workspaces. Int. J. Hum. Robot. 2013, 10, 1350031. [Google Scholar] [CrossRef]
- Ye, C.; Yang, J.; Zhao, H.; Ding, H. Task-dependent workpiece placement optimization for minimizing contour errors induced by the low posture-dependent stiffness of robotic milling. Int. J. Mech. Sci. 2021, 205, 106601. [Google Scholar] [CrossRef]
- Vosniakos, G.-C.; Matsas, E. Improving feasibility of robotic milling through robot placement optimisation. Robot. Comput. Manuf. 2010, 26, 517–525. [Google Scholar] [CrossRef]
- Henao, J.C.R.; Garzón, J.A.J.; Muñoz, L.D. Manipulability index study on the KUKA robot KR5 ARC HW. In Proceedings of the 2012 XVII Symposium of Image, Signal Processing, and Artificial Vision (STSIVA), Medellin, Colombia, 12–14 September 2012; pp. 72–77. [Google Scholar]
- Malhan, R.K.; Kabir, A.M.; Shah, B.; Gupta, S.K. Identifying Feasible Workpiece Placement with Respect to Redundant Manipulator for Complex Manufacturing Tasks. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 5585–5591. [Google Scholar] [CrossRef]
- Skuric, A.; Padois, V.; Daney, D. On-line force capability evaluation based on efficient polytope vertex search. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2021; pp. 1700–1706. [Google Scholar] [CrossRef]
- Wang, G.; Li, W.; Jiang, C.; Zhu, D.; Li, Z.; Xu, W.; Zhao, H.; Ding, H. Trajectory Planning and Optimization for Robotic Machining Based On Measured Point Cloud. IEEE Trans. Robot. 2021, 1–17. [Google Scholar] [CrossRef]
- Stravopodis, N.; Valsamos, C.; Moulianitis, V.C. Experimental Verification of Optimized Anatomies on a Serial Metamorphic Manipulator. Sensors 2022, 22, 918. [Google Scholar] [CrossRef] [PubMed]
- Malhan, R.; Kabir, A.; Shah, B.; Centea, T.; Gupta, S. Determining Feasible Robot Placements in Robotic Cells for Composite Prepreg Sheet Layup. In Proceedings of the 14th International Manufacturing Science and Engineering Conference, Erie, PA, USA, 10–14 June 2019. [Google Scholar]
- Schwartz, E.; Manseur, R.; Doty, K. Noncommensurate systems in robotics. Int. J. Robot. Automat. 2002, 17, 86–92. [Google Scholar]
- Bruyninckx, H. Robot Kinematics and Dynamics; Katholieke Universiteit Leuven, Department of Mechanical Engineering: Leuven, Belgium, 2021. [Google Scholar]
- Yoshikawa, T. Manipulability of Robotic Mechanisms. Int. J. Robot. Res. 1985, 4, 3–9. [Google Scholar] [CrossRef]
- Zhang, L.; Guo, S.; Huang, Y.; Xiong, X. Kinematic Singularity Analysis and Simulation for 7DOF Anthropomorphic Manipulator. Int. J. Mechatron. Appl. Mech. 2019, 6, 157–164. [Google Scholar]
- Feng, Y.; Fang, L.; Bu, W.; Kang, J. Multi-objective Optimization for Design of Redundant Serial Robots. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020. [Google Scholar]
- Chiu, S.L. Task Compatibility of Manipulator Postures. Int. J. Robot. Res. 1988, 7, 13–21. [Google Scholar] [CrossRef]
- Dubey, R.; Luh, J.Y.S. Redundant robot control using task based performance measures. J. Robot. Syst. 1988, 5, 409–432. [Google Scholar] [CrossRef]
- Kokkinis, T.; Paden, B. Kinetostatic performance limits of cooperating robot manipulators using force-velocity polytopes. In Proceedings of the ASME Winter Annual Meeting-Robotics Research, Monterey, CA, USA, 8–9 November 1999; Volume 14. [Google Scholar]
- Choi, H.; Ryu, J. Convex hull-based power manipulability analysis of robot manipulators. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 2972–2977. [Google Scholar]
- Jihong, L.; Won, K.T. Inverse kinematic solution based on decomposed manipulability. In Proceedings of the Proceedings 1999 IEEE International Conference on Robotics and Automation (Cat. No.99CH36288C), Detroit, MI, USA, 10–15 May 1999; Volume 1512, pp. 1514–1519. [Google Scholar]
- Staffetti, E.; Bruyninckx, H.; De Schutter, J. On the Invariance of Manipulability Indices. In Advances in Robot Kinematics; Springer: Cham, The Netherland, 2002; pp. 57–66. [Google Scholar] [CrossRef] [Green Version]
- Bicchi, A.; Prattichizzo, D. Manipulability of cooperating robots with unactuated joints and closed-chain mechanisms. IEEE Trans. Robot. Autom. 2000, 16, 336–345. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Wang, L. Reactive task-oriented redundancy resolution using constraint-based programming. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 5689–5694. [Google Scholar]
- Boschetti, G. A Novel Kinematic Directional Index for Industrial Serial Manipulators. Appl. Sci. 2020, 10, 5953. [Google Scholar] [CrossRef]
- Boschetti, G.; Rosa, R.; Trevisani, A. Parallel Robot Translational Performance Evaluation through Direction-Selective Index (DSI). J. Robot. 2011, 2011, 1–14. [Google Scholar] [CrossRef]
- Mansouri, I.; Ouali, M. The power manipulability – A new homogeneous performance index of robot manipulators. Robot. Comput. Manuf. 2011, 27, 434–449. [Google Scholar] [CrossRef]
- Finotello, R.; Grasso, T.; Rossi, G.; Terribile, A. Computation of kinetostatic performances of robot manipulators with polytopes. In Proceedings of the IEEE International Conference on Robotics and Automation (Cat. No.98CH36146), Leuven, Belgium, 20 May 1998; Volume 3244, pp. 3241–3246. [Google Scholar]
- Yoshikawa, T. Translational and rotational manipulability of robotic manipulators. In Proceedings of the IECON ‘91: 1991 International Conference on Industrial Electronics, Control and Instrumentation, Kobe, Japan, 28 October-1 November 1991; Volume 1172, pp. 1170–1175. [Google Scholar]
- Long, P.; Padir, T.; Padır, T. Constrained Manipulability for Humanoid Robots Using Velocity Polytopes. Int. J. Hum. Robot. 2019, 17, 1950037. [Google Scholar] [CrossRef]
- Moulianitis, V.; Katrantzis, E.; Stravopodis, N.; Aspragathos, N. A Comparative Study of Three Manipulator Performance Measures. In Proceedings of the 27th International Conference on Robotics in Alpe-Adria Danube Region (RAAD 2018), Patras, Greece, 6–8 June 2018; Springer: Cham, Switzerland, 2018; pp. 19–27. [Google Scholar]
- Mansfeld, N.; Keppler, M.; Haddadin, S. Speed Gain in Elastic Joint Robots: An Energy Conversion-Based Approach. IEEE Robot. Autom. Lett. 2021, 6, 4600–4607. [Google Scholar] [CrossRef]
- Kim, J.H.; Shin, Y.J.; Jang, I.G. Evaluating the Maximum Directional Kinematic Capability of a Redundant Manipulator Based on Allowable Velocity and Force. IEEE Access 2021, 9, 88085–88097. [Google Scholar] [CrossRef]
- Marais, W.J.; Williams, S.B.; Pizarro, O. Anisotropic Disturbance Rejection for Kinematically Redundant Systems With Applications on an UVMS. IEEE Robot. Autom. Lett. 2021, 6, 7017–7024. [Google Scholar] [CrossRef]
- Hernansanz, A.; Amat, J.; Casals, A. Optimization criterion for safety task transfer in cooperative robotics. In Proceedings of the 2009 International Conference on Advanced Robotics, Munich, Germany, 22–26 June 2009; pp. 1–6. [Google Scholar]
- Jihong, L. A study on the manipulability measures for robot manipulators. In Proceedings of the 1997 IEEE/RSJ International Conference on Intelligent Robot and Systems, Innovative Robotics for Real-World Applications, IROS ‘97, Genova, Italy, 11 September 1997; Volume 1453, pp. 1458–1465. [Google Scholar]
- Bicchi, A.; Melchiorri, C.; Balluchi, D. On the mobility and manipulability of general multiple limb robots. IEEE Trans. Robot. Autom. 1995, 11, 215–228. [Google Scholar] [CrossRef]
- Choi, H.-B.; Ryu, J. Convex hull-based velocity transmission capability of parallel manipulators. Int. J. Adv. Manuf. Technol. 2012, 65, 695–704. [Google Scholar] [CrossRef]
- Lee, J. A structured algorithm for minimum l∞-norm solutions and its application to a robot velocity workspace analysis. Robotica 2001, 19, 343–352. [Google Scholar] [CrossRef]
- Lee, J. Velocity workspace analysis for multiple arm robot systems. Robotica 2001, 19, 581–591. [Google Scholar] [CrossRef]
- Cyrus, M.; Beck, J. Generalized two- and three-dimensional clipping. Comput. Graph. 1978, 3, 23–28. [Google Scholar] [CrossRef]
- Pholsiri, C.; Kapoor, C.; Tesar, D. Real-Time Robot Capability Analysis. In Proceedings of the ASME 2005 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Long Beach, CA, USA, 24–28 September 2005; pp. 973–982. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
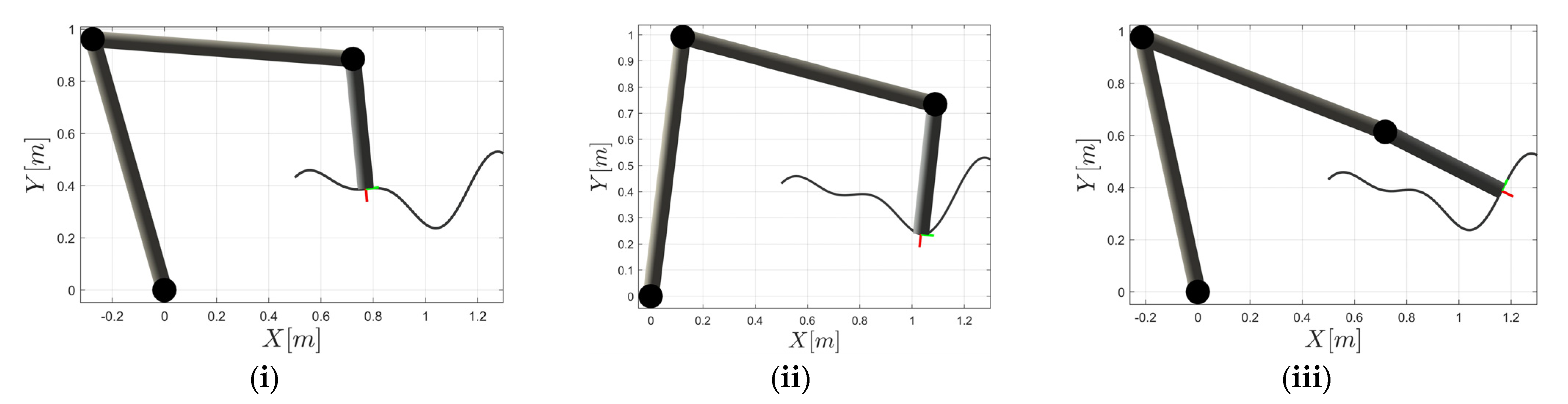
| Path Segment | Position | |||
|---|---|---|---|---|
| (i) | X: 0.7720, Y: 0.3882 | 1.3231 | ||
| (ii) | X: 1.0340, Y: 0.2374 | 0.0493 | ||
| (iii) | X: 1.1640, Y: 0.3877 | 62.4704 |
| Path Segment | |||
|---|---|---|---|
| (i) | 1.1439 | 0.8646 | |
| (ii) | 0.0489 | 0.9935 | |
| (iii) | 0.9471 | 0.0152 |
| Path Segment | |||
|---|---|---|---|
| (i) | 4.4632 | ||
| (ii) | 0.0360 | ||
| (iii) | 0.7454 |
| Path Segment | |||
|---|---|---|---|
| (i) | 1.1552 | 0.2588 | |
| (ii) | 0.0699 | 1.9391 | |
| (iii) | 2.4365 | 3.2688 |
| Path Segment | |||
|---|---|---|---|
| (i) | 2.7351 | 0.6128 | |
| (ii) | 0.1656 | 4.5959 | |
| (iii) | 2.6605 | 3.5693 |
| Path Segment | % | ||
|---|---|---|---|
| (i) | 1.1552 | 2.7351 | 136.77 |
| (ii) | 0.0699 | 0.1656 | 136.91 |
| (iii) | 2.4365 | 2.6605 | 9.19 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stradovnik, S.; Hace, A. Task-Oriented Evaluation of the Feasible Kinematic Directional Capabilities for Robot Machining. Sensors 2022, 22, 4267. https://doi.org/10.3390/s22114267
Stradovnik S, Hace A. Task-Oriented Evaluation of the Feasible Kinematic Directional Capabilities for Robot Machining. Sensors. 2022; 22(11):4267. https://doi.org/10.3390/s22114267
Chicago/Turabian StyleStradovnik, Saša, and Aleš Hace. 2022. "Task-Oriented Evaluation of the Feasible Kinematic Directional Capabilities for Robot Machining" Sensors 22, no. 11: 4267. https://doi.org/10.3390/s22114267
APA StyleStradovnik, S., & Hace, A. (2022). Task-Oriented Evaluation of the Feasible Kinematic Directional Capabilities for Robot Machining. Sensors, 22(11), 4267. https://doi.org/10.3390/s22114267