
TLS-Detectable Plane Changes for Deformation Monitoring


Abstract
:1. Introduction
1.1. Use of TLS for Deformation Monitoring
1.2. Motivation
1.3. Literature Overview
2. Methodology
2.1. Parameters and Precision Estimation
2.2. Statistical Significance
- The null hypothesis (H0): there is no displacement, ;
- The alternative hypothesis (H1): displacement exists, .
2.3. Experimental Setup
- Setups with boards at distances of approximately 5, 10, and 50 m (D5, D10, and D50, respectively);
- Setups with boards at incidence angles of approximately 0°, 40°, and 75° (I1, I2, and I3, respectively).
2.4. Instrumentation
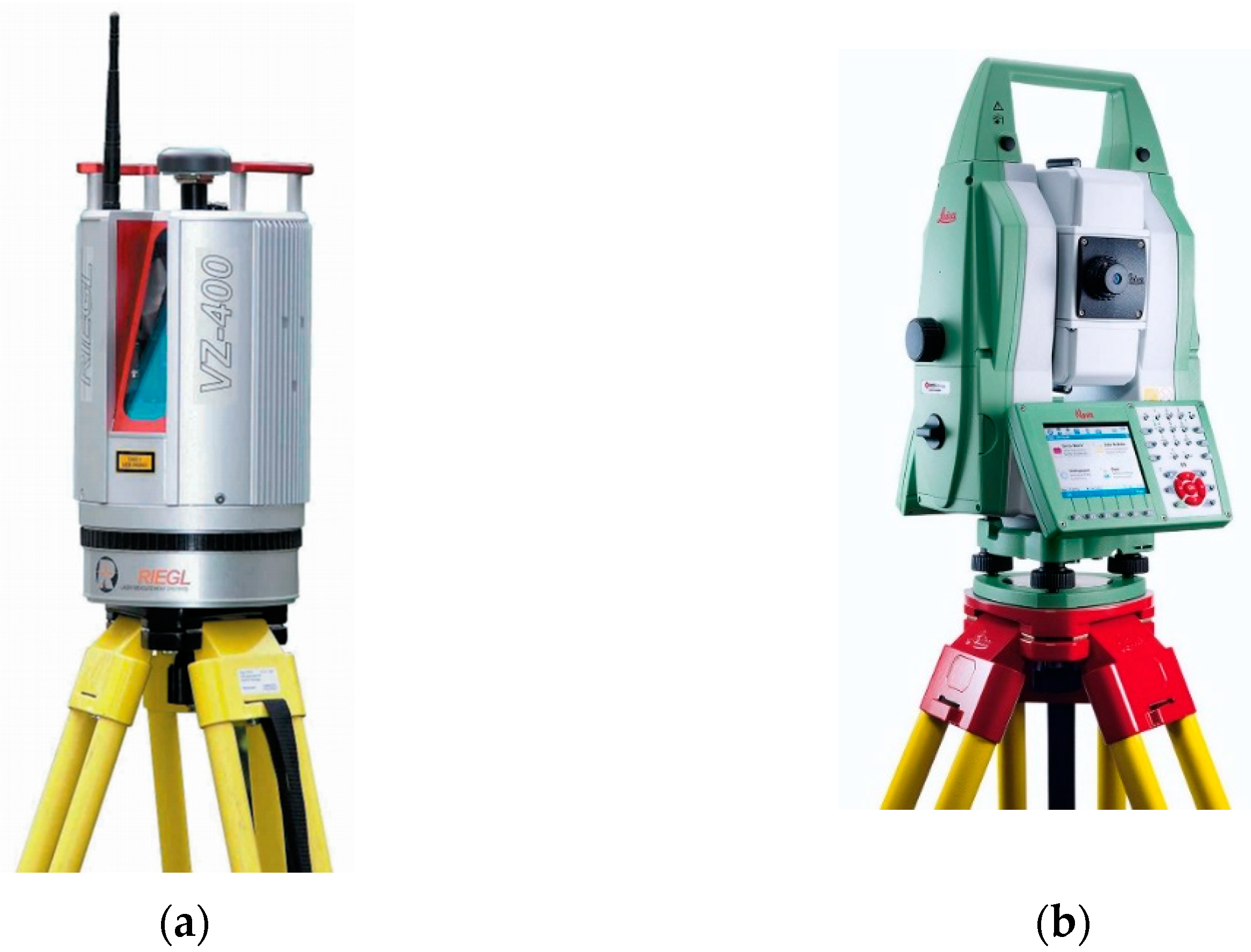
2.4.1. Scanning Devices
- A terrestrial laser scanner, Riegl VZ-400;
- A robotic total station, Leica MS50.
2.4.2. Offset Mechanisms
3. Results
3.1. Structure of the Results
3.2. Shifting Test
3.2.1. Translation-Detection Accuracy
3.2.2. Statistical Test
3.3. Tilting Test
3.3.1. Tilting-Declination Detection Accuracy
3.3.2. Statistical Testing
3.4. Single-Parameter Precision
4. Discussion
4.1. Perceived Precision
- The total station, despite having lower scanning density, provided precision approximately two times higher than the actual terrestrial laser scanner. For Riegl VZ-400, the average parameter precision was below 1 mm; for Leica MS50, the result was two times better: below 0.5 mm. This result was expected since the nominal specifications of the used instruments outlined the higher precision of the total station.
- Longer distances led to lower precision values for both instruments. Furthermore, in most cases, larger incidence angles led to lower precision.
4.2. Perceived Accuracy
- For the tilting of the board, the perceived average accuracy for both instruments was between 20″ and 30″. This value corresponds to a tilt value of 0.15 mm per meter. The accuracy decreased with increases in both distance and incidence angles.
- For shifting the board translationally, the perceived average accuracy for Riegl VZ-400 was 0.4 mm and for Leica MS50, 0.1 mm. Significant changes according to distance or incidence angle were not observed.
4.3. Statistical Testing-Significance of Changes
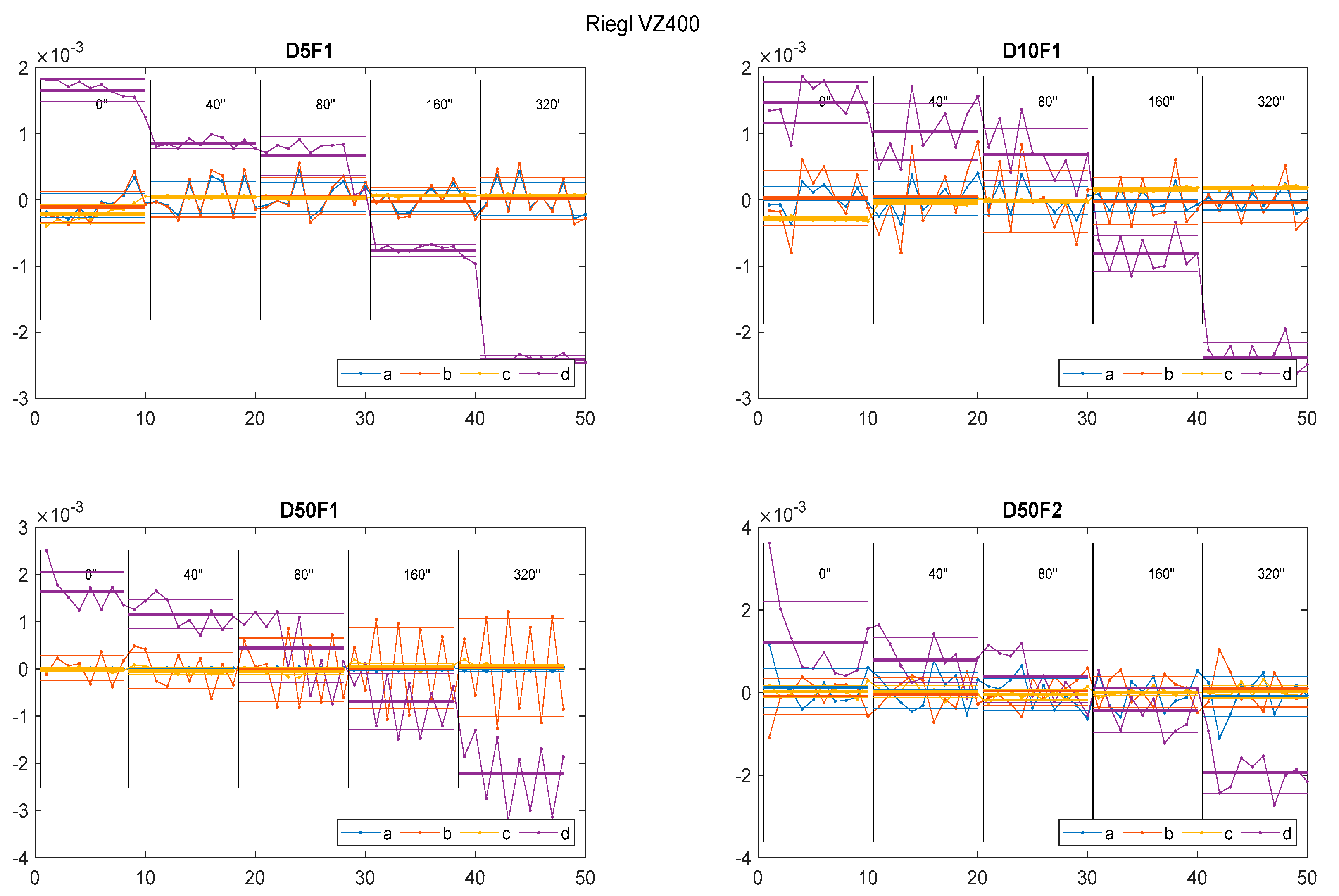
- For translational changes of the plane, statistically significant changes were detected when the change was higher than 1.5 mm for the Riegl VZ-400 laser scanner and 0.5 mm for the Leica MS50 total station. However, slightly smaller changes could be detectable at shorter distances and lower incidence angles.
- For the plane-slope changes, statistically significant changes were detected when the change was greater than 150″ for both instruments used in the experiment. This value corresponds to a tilt of 0.7 mm per meter.
- In real case scenarios, we cannot know whether to expect a shift or tilt of the plane, so we will always use a four degrees of freedom (DOF) test. This might lead to the detection of significant changes too early (in terms of actual displacement). However, we can see from Figure 7 and Figure 9 that the lines from 4DOF tests do not cross the critical value borders much earlier than the lines from 1DOF tests.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, H.; Lee, J.; Tung, H.; Chen, C.; Lee, H.K. Variable vertical movements and their deformation behaviors at convergent plate suture: 14-year-long (2004–2018) repeated measurements of precise leveling around middle Longitudinal Valley in eastern Taiwan. J. Asian Earth Sci. 2021, 218, 104865. [Google Scholar] [CrossRef]
- Zhou, J.; Xiao, H.; Jiang, W.; Bai, W.; Liu, G. Automatic subway tunnel displacement monitoring using robotic total station. Measurement 2020, 151, 107251. [Google Scholar] [CrossRef]
- Schneider, D. Terrestrial laser scanning for area based deformation analysis of towers and water dams. In Proceedings of the 3rd IAG/12th FIG Symposium, Baden, Austria, 22–24 May 2006. [Google Scholar]
- Chen, X.; Ban, Y.; Hua, X.; Lu, T.; Tao, W.; An, Q. A method for the calculation of Detectable Landslide using Terrestrial Laser Scanning data. Measurement 2020, 160, 107852. [Google Scholar] [CrossRef]
- Holst, C.; Kuhlmann, H. Challenges and present fields of action at laser scanner based deformation analyses. In Proceedings of the 3rd Joint International Symposium on Deformation Monitoring (JISDM), Vienna, Austria, 30 March–1 April 2016. [Google Scholar]
- Friedli, E.; Wieser, A. Identification of stable surfaces within point clouds for areal deformation monitoring. In Proceedings of the 3rd Joint International Symposium on Deformation Monitoring (JISDM), Vienna, Austria, 30 March–1 April 2016. [Google Scholar]
- Vezočnik, R. Analysis of Terrestrial Laser Scanning Technology for Structural Deformation Monitoring. Ph.D. Thesis, University of Ljubljana, Ljubljana, Slovenia, 2011. [Google Scholar]
- Kregar, K.; Savšek, S.; Štebe, G. Statistical evaluation of the structural monitoring with terrestrial laser scanning. In Ingenieurvermessung 17: Beiträge zum 18. Internationalen Ingenieurvermessungskurs; Lienhart, W., Ed.; Wichmann: Graz, Austria; Berlin, Germany, 2017; pp. 337–349. Available online: https://plus.si.cobiss.net/opac7/bib/8120929 (accessed on 7 July 2020).
- Heunecke, O.; Kuhlmann, H.; Welsch, W.; Eichhorn, A.; Neuner, H. Auswertung geodätischer Überwachungsmessungen. In Handbuch Ingenieurgeodäsie, 2nd ed.; Möser, M., Müller, G., Schlemmer, H., Eds.; Wichmann: Heidelberg, Germany, 2013; p. 705. [Google Scholar]
- Chrzanowski, A.; Frodge, S.L.; Avella, S. The worldwide status of monitoring and analysis of dam deformations. In Proceedings of the 7th International Symposium on Deformation Measurements Together with 6th Canadian Symposium on Mining Surveying, Banff, AB, Canada, 2–6 May 1993; pp. 77–88. [Google Scholar]
- Bu, L.; Zhang, Z. Application of point clouds from terrestrial 3D laser scanner for deformation measurements. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Commision V: G V/3, Volume XXXVII, Part B5, Beijing, China, 3–11 July 2008; pp. 545–548. [Google Scholar]
- Seo, H. Long-term Monitoring of zigzag-shaped concrete panel in retaining structure using laser scanning and analysis of influencing factors. Opt. Lasers Eng. 2020, 139, 106498. [Google Scholar] [CrossRef]
- Seo, H.; Zhao, Y.; Chen, C. Displacement Mapping of Point Clouds for Retaining Structure Considering Shape of Sheet Pile and Soil Fall Effects during Excavation. J. Geotech. Geoenvironmental Eng. 2022, 148, 04022016. [Google Scholar] [CrossRef]
- Capra, A.; Scaioni, M.; Wieser, A. Special issue: Terrestrial remote sensing for areal deformation monitoring. Appl. Geomat. 2015, 7, 61–63. [Google Scholar] [CrossRef] [Green Version]
- Harmening, C.; Neuner, H. Using model selection criteria to determine the optimal number of B-spline control points for areal deformation modelling. In Proceedings of the 3rd Joint international Symposium on Deformation Monitoring (JISDM), Vienna, Austria, 30 March–1 April 2016. [Google Scholar]
- Mill, T.; Alt, A.; Liias, R. Combined 3D building surveying techniques-terrestrial laser scanning (TLS) and total station surveying for BIM data management purposes. J. Civ. Eng. Manag. 2014, 19, S23–S32. [Google Scholar] [CrossRef]
- Pejić, M. Design and optimisation of laser scanning for tunnels geometry inspection. Tunn. Undergr. Space Technol. 2013, 37, 199–206. [Google Scholar] [CrossRef]
- González-Aguilera, D.; Gómez-Lahoz, J.; Sánchez, J.A. New Approach for Structural Monitoring of Large Dams with a Three-Dimensional Laser Scanner. Sensors 2008, 8, 5866–5883. [Google Scholar] [CrossRef] [Green Version]
- Qiu, D.W.; Wu, J.G. Terrestrial laser scanning for deformation monitoring of the thermal pipeline traversed subway tunnel engineering. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Commision V: WG V/3, Volume XXXVII, Part B5, Beijing, China, 3–11 July 2008; pp. 491–494. [Google Scholar]
- Abellan, A.; Jaboyedoff, M.; Oppikofer, T.; Vilaplana, J.M. Detection of millimetric deformation using a terrestrial laser scanner: Experiment and application to a rockfall event. Nat. Hazards Earth Syst. Sci. 2009, 9, 365–372. [Google Scholar] [CrossRef] [Green Version]
- Abellán, A.; Calvet, J.; Vilaplana, J.M.; Blanchard, J. Detection and spatial prediction of rockfalls by means of terrestrial laser scanner monitoring. Geomorphology 2010, 119, 162–171. [Google Scholar] [CrossRef]
- Alba, M.; Fregonese, L.; Prandi, F.; Scaioni, M.; Valgoi, P. Structural monitoring of a large dam by terrestrial laser scanning. In International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences; ISPRS: Dresden, Germany, 2006; Volume 36. [Google Scholar]
- Berényi, A.; Lovas, T.; Barsi, Á.; Dunai, L. Potential of terrestrial laser scanning in load test measurements of bridges. Period Polytech Civ. Eng. 2009, 53, 25–33. [Google Scholar] [CrossRef]
- Zogg, H.M.; Ingesand, H. Terrestrial laser scanning for deformation monitoring-load tests on the Felsenau viaduct (CH). In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Commision V: WG V/3, Volume XXXVII, Part B5, Beijing, China, 3–11 July 2008; pp. 555–562. [Google Scholar] [CrossRef]
- Liu, C.; Li, N.; Wu, H.; Meng, X. Detection of High-Speed Railway Subsidence and Geometry Irregularity Using Terrestrial Laser Scanning. J. Surv. Eng. 2014, 140, 04014009. [Google Scholar] [CrossRef]
- Alba, M.; Bernardini, G.; Giussani, A.; Ricci, P.P.; Roncoroni, F.; Scaioni, M.; Valgoi, P.; Zhang, K. Measurement of dam deformations by terrestrial interferometric techniques. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Commision I: WG I/2, Volume XXXVII, Part B1, Beijing, China, 3–11 July 2008; pp. 133–139. [Google Scholar]
- Hesse, C.; Neuner, H.; Kutterer, H. Statistical analysis of kinematic lasers scans. In Optical 3-D Measurement Techniques; Grün, A., Kahmen, H., Eds.; SPIE: Bellingham, WA, USA, 2005; Volume 2, pp. 103–112. [Google Scholar]
- Schill, F.; Eichhorn, A. Investigations of low-and high-frequency movements of wind power plants using a profile laser scanner. In Proceedings of the 3rd Joint International Symposium on Deformation Monitoring (JISDM), Vienna, Austria, 30 March–1 April 2016. [Google Scholar]
- Pesci, A.; Teza, G.; Bonali, E.; Casula, G.; Boschi, E. A laser scanning-based method for fast estimation of seismic-induced building deformations. ISPRS J. Photogramm. Remote Sens. 2013, 79, 185–198. [Google Scholar] [CrossRef]
- Tsakiri, M.; Lichti, D.; Pfeifer, N. Terrestrial laser scanning for deformation monitoring. In Proceedings of the 3rd IAG/12th FIG Symposium, Baden, Austria, 22–24 May 2006. [Google Scholar]
- Holst, C.; Medic, T.; Nothnagel, A.; Kuhlmann, H. Analyzing shape deformation and rigid body movement of structures using commonly misaligned terrestrial laser scanners: The radio telescope case. In Proceedings of the 4th Joint International Symposium on Deformation Monitoring (JISDM), Athens, Greece, 15–17 May 2019. [Google Scholar]
- Kauker, S.; Schwieger, V. A synthetic covariance matrix for monitoring by terrestrial laser scanning. J. Appl. Geod. 2017, 11, 77–87. [Google Scholar] [CrossRef]
- Xuan, W.; Hua, X.H.; Qiu, W.N.; Zou, J.G. A new method for determining the deformation monitorable indicator of point cloud. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume III-7, XXIII, Commission VII, WG VII/5, ISPRS Congress, Prague, Czech Republic, 12–19 July 2016; pp. 157–164. [Google Scholar] [CrossRef] [Green Version]
- Erdélyi, J.; Kopáčik, A.; Lipták, I.; Kyrinovič, P. Automation of point cloud processing to increase the deformation monitoring accuracy. Appl Geomat. 2017, 9, 105–113. [Google Scholar] [CrossRef]
- Williams, J.G.; Anders, K.; Winiwarter, L.; Zahs, V.; Höfle, B. Multi-directional change detection between point clouds. ISPRS J. Photogramm. Remote Sens. 2021, 172, 95–113. [Google Scholar] [CrossRef]
- López, F.D.A.; Ordóñez, C.; Roca-Pardiñas, J.; García-Cortés, S. Point cloud comparison under uncertainty. Application to beam bridge measurement with terrestrial laser scanning. Measurement 2014, 51, 259–264. [Google Scholar] [CrossRef]
- Holst, C.; Nothnagel, A.; Blome, M.; Becker, P.; Eichborn, M.; Kuhlmann, H. Improved area-based deformation analysis of a radio telescope’s main reflector based on terrestrial laser scanning. J. Appl. Geod. 2015, 9, 1–14. [Google Scholar] [CrossRef]
- Kalenjuk, S.; Lienhart, W.; Rebhan, M.J. Processing of mobile laser scanning data for large-scale deformation monitoring of anchored retaining structures along highways. Comput. Aided Civ. Infrastruct. Eng. 2021, 36, 678–694. [Google Scholar] [CrossRef]
- Scaioni, M.; Wang, J. Technologies for Dam Deformation Measurement: Recent Trends and Future Challenges. In Proceedings of the 3rd Joint International Symposium on Deformation Monitoring (JISDM), Vienna, Austria, 30 March–1 April 2016. [Google Scholar]
- Gordon, S.J.; Lichti, D.D. Modeling Terrestrial Laser Scanner Data for Precise Structural Deformation Measurement. J. Surv. Eng. 2007, 133, 72–80. [Google Scholar] [CrossRef]
- Poppinga, J.; Vaskevicius, N.; Birk, A.; Pathak, K. Fast Plane Detection and Polygonization in Noisy 3D Range Images. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 3379–3383. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Koch, K.R. Parameter Estimation and Hypothesis Testing in Linear Models; Springer: Berlin/Heidelberg, Germany, 1999; p. 334. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Riegl VZ-400 | Leica MS50 | |
|---|---|---|
| Temperature operating range | −40 to +40 °C | −20 to +50 °C |
| Scanner type | hybrid | robotic total station |
| Vertical declination mechanism | rotating 3-facet mirror | |
| Horizontal declination mechanism | rotating head | |
| Field of view | V: +60° to −40°; Hz: 360° | fulldome (except nadir) |
| Laser | near IR: = 1550 nm | visible red: = 658 nm |
| Scanning rate | <122,000 pts/s | 1000 pts/s |
| Range | <600 m | 300 m * |
| Accuracy | Resolution 1.8″ mm 5 mm | 1″ 1 mm * |
| Laser beam divergence | 3.5 mm/10 m 72″ | 8 20 mm/50 m 30″ 80″ |
| Setup\RMSE [mm] | Riegl VZ-400 | Leica MS50 |
|---|---|---|
| D5I1 | 0.57 | 0.04 |
| D5I2 | 0.51 | 0.07 |
| D5I3 | 0.11 | 0.11 |
| D10I1 | 0.43 | 0.14 |
| D10I2 | 0.29 | 0.07 |
| D10I3 | 0.07 | 0.10 |
| D50I1 | 0.48 | 0.04 |
| D50I2 | 0.04 | 0.10 |
| D50I3 | 0.43 | 0.14 |
| Average | 0.38 | 0.10 |
| Setup\RMSE [mm] | Riegl VZ-400 | Leica MS50 |
|---|---|---|
| D5I1 | 13.6 | 5.5 |
| D5I2 | 12.7 | 18.4 |
| D5I3 | 33.0 | 56.0 * |
| D10I1 | 142.4 * | 5.9 |
| D10I2 | 11.8 | 33.2 |
| D10I3 | 20.4 | 25.1 |
| D50I1 | 13.9 | 31.0 |
| D50I2 | 17.5 | 12.7 |
| D50I3 | 43.4 | 49.7 |
| Average | 52.0 | 31.3 |
| * Average (gross error excluded) | 22.6 | 26.7 |
| Riegl VZ-400/Leica MS50 | |||||
|---|---|---|---|---|---|
| D5I1 | 0.51/0.03 | 0.31/0.02 | 0.23/0.04 | 0.68/0.03 | 48.0/7.4 |
| D5I2 | 0.21/0.08 | 0.28/0.09 | 0.10/0.05 | 0.25/0.11 | 34.5/19.2 |
| D5I3 | 0.28/0.39 | 0.35/0.51 | 0.04/0.09 | 0.24/0.29 | 52.1/120.4 |
| D10I1 | 1.07/0.03 | 0.72/0.04 | 0.28/0.08 | 1.34/0.02 | 59.2/16.6 |
| D10I2 | 0.52/0.12 | 0.14/0.15 | 0.06/0.11 | 0.27/0.08 | 22.3/41.4 |
| D10I3 | 0.26/0.24 | 0.31/0.15 | 0.04/0.04 | 0.20/0.15 | 43.0/50.4 |
| D50I1 | 0.33/0.10 | 1.57/0.04 | 0.17/0.04 | 1.63/0.07 | 35.2/9.1 |
| D50I2 | 0.18/0.23 | 0.68/0.11 | 0.12/0.04 | 0.63/0.17 | 43.6/15.4 |
| D50I3 | 0.14/0.34 | 0.82/0.18 | 0.03/0.01 | 0.39/0.36 | 38.6/28.7 |
| Riegl VZ-400/Leica MS50 | ||||
|---|---|---|---|---|
| D5I1 | 0.21/0.04 | 0.27/0.02 | 0.08/0.05 | 0.17/0.04 |
| D5I2 | 0.01/0.02 | 0.17/0.15 | 0.01/0.08 | 0.10/0.14 |
| D5I3 | 1.61/0.12 | 0.81/0.06 | 1.56/0.13 | 0.29/0.06 |
| D10I1 | 0.20/0.05 | 0.42/0.01 | 0.03/0.15 | 0.33/0.12 |
| D10I2 | 0.46/0.05 | 0.43/0.34 | 0.08/0.17 | 0.38/0.10 |
| D10I3 | 0.76/0.29 | 0.07/0.53 | 0.17/0.23 | 0.12/0.19 |
| D50I1 | 0.03/0.03 | 0.65/0.06 | 0.06/0.04 | 0.56/0.03 |
| D50I2 | 0.44/0.34 | 0.41/0.11 | 0.14/0.20 | 0.74/0.19 |
| D50I3 | 0.28/0.89 | 1.16/0.81 | 1.19/0.43 | 0.38/0.34 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kregar, K.; Marjetič, A.; Savšek, S. TLS-Detectable Plane Changes for Deformation Monitoring. Sensors 2022, 22, 4493. https://doi.org/10.3390/s22124493
Kregar K, Marjetič A, Savšek S. TLS-Detectable Plane Changes for Deformation Monitoring. Sensors. 2022; 22(12):4493. https://doi.org/10.3390/s22124493
Chicago/Turabian StyleKregar, Klemen, Aleš Marjetič, and Simona Savšek. 2022. "TLS-Detectable Plane Changes for Deformation Monitoring" Sensors 22, no. 12: 4493. https://doi.org/10.3390/s22124493
APA StyleKregar, K., Marjetič, A., & Savšek, S. (2022). TLS-Detectable Plane Changes for Deformation Monitoring. Sensors, 22(12), 4493. https://doi.org/10.3390/s22124493