
Conceptual Modeling of Extended Collision Warning System from the Perspective of Smart Product-Service System

Abstract
:1. Introduction
- to PSS and smart PSS research by presenting a stepwise method to create a smart PSS conceptual design.
- to CWS research, (i) by presenting a novel understanding and the conceptual framework of the extended CWS from the perspective of smart PSS; (ii) a conceptual extended CWS modeling approach integrating an intelligent product system, stakeholders, and collision warning service system module; and (iii) a collision-warning service system to assist drivers and pedestrians in avoiding vehicle collisions and vehicle–pedestrian collisions.
- to the design for sustainability research by exemplifying how a smart PSS can help to guarantee the correct and safe use of PSS and thus increase its impact on sustainability.
2. Literature Review
2.1. Definition and Composition of Smart PSS
2.2. Smart Product–Service System Development
2.3. CWS Development
3. Conceptual Modeling of Extended CWS from the Perspective of Smart PSS Based on TRIZ Function Model
3.1. Extended CWS from the Perspective of Smart PSS
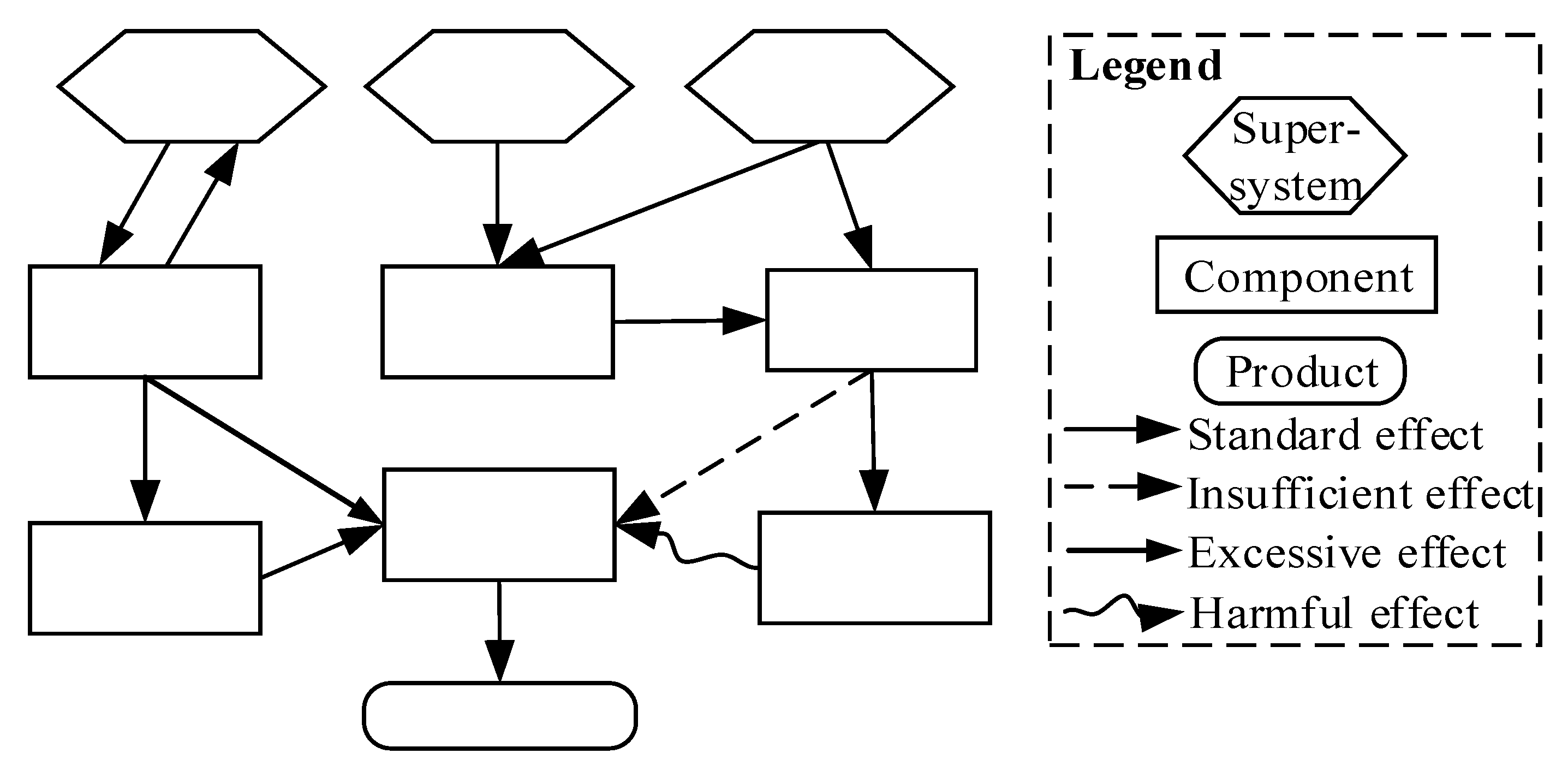
3.2. TRIZ Function Model
3.3. Conceptual Modeling of Extended CWS
3.3.1. Function Analyzing and Decomposing
3.3.2. Function Module Division
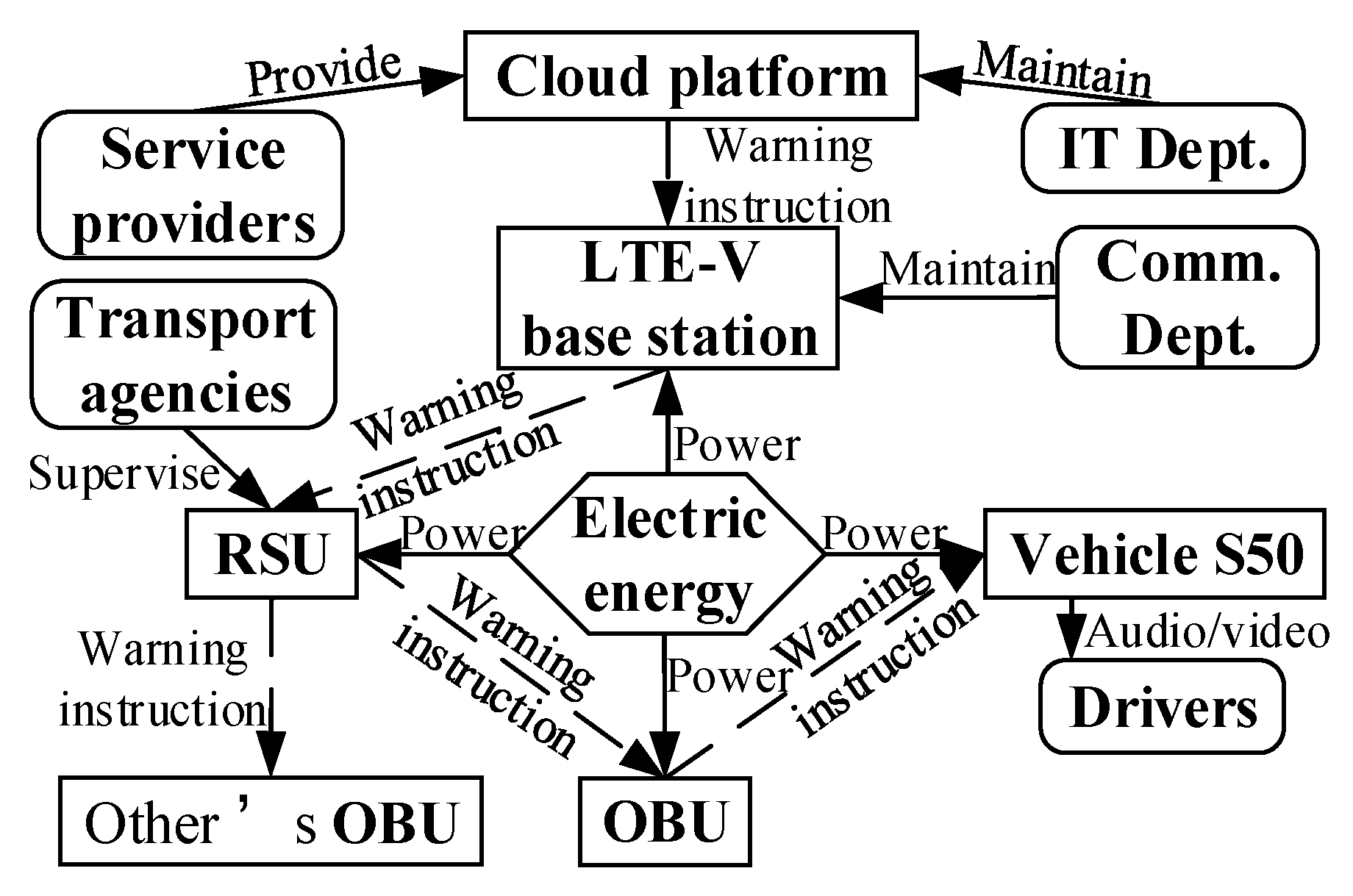
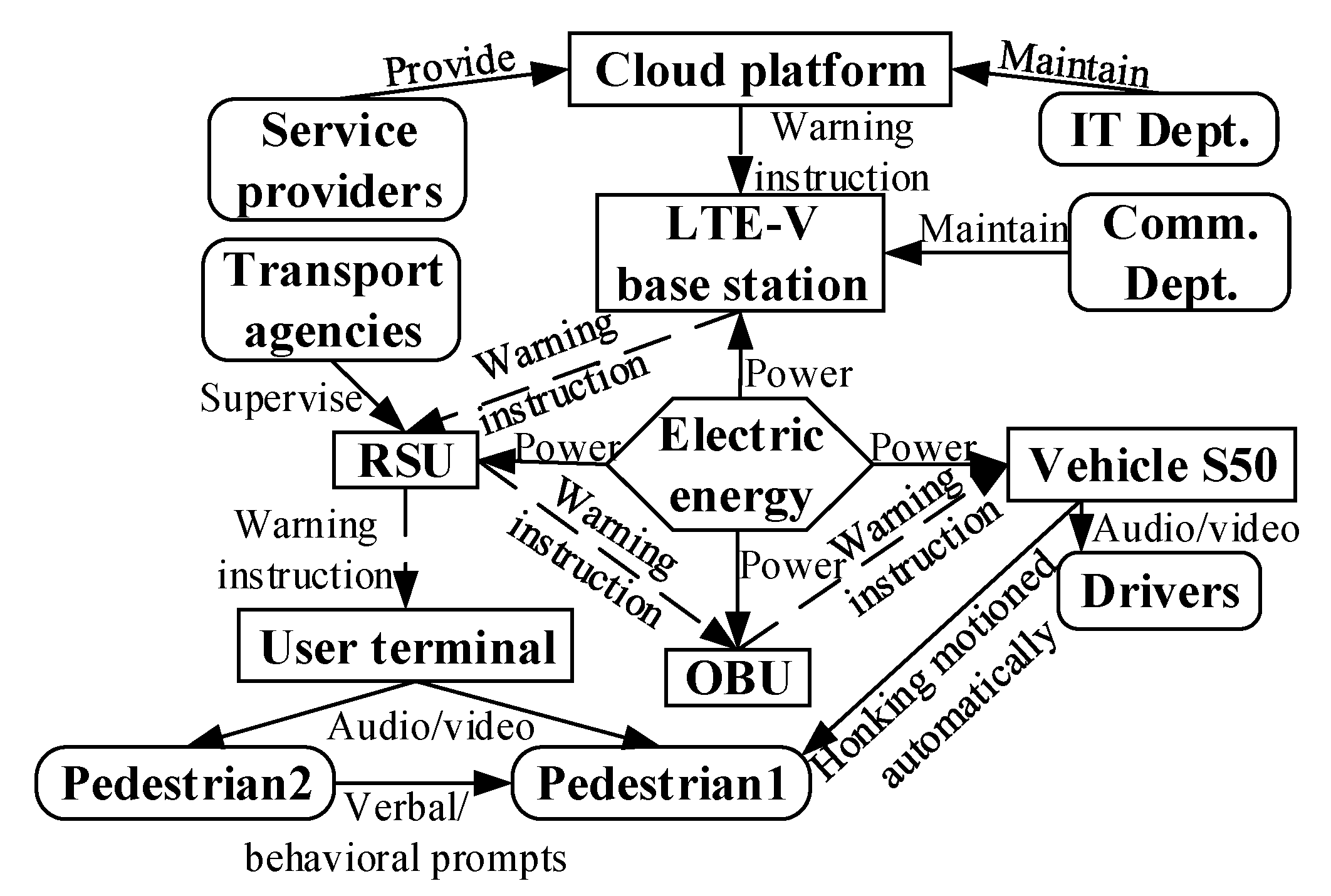
3.3.3. Modeling Partitioned Function Modules
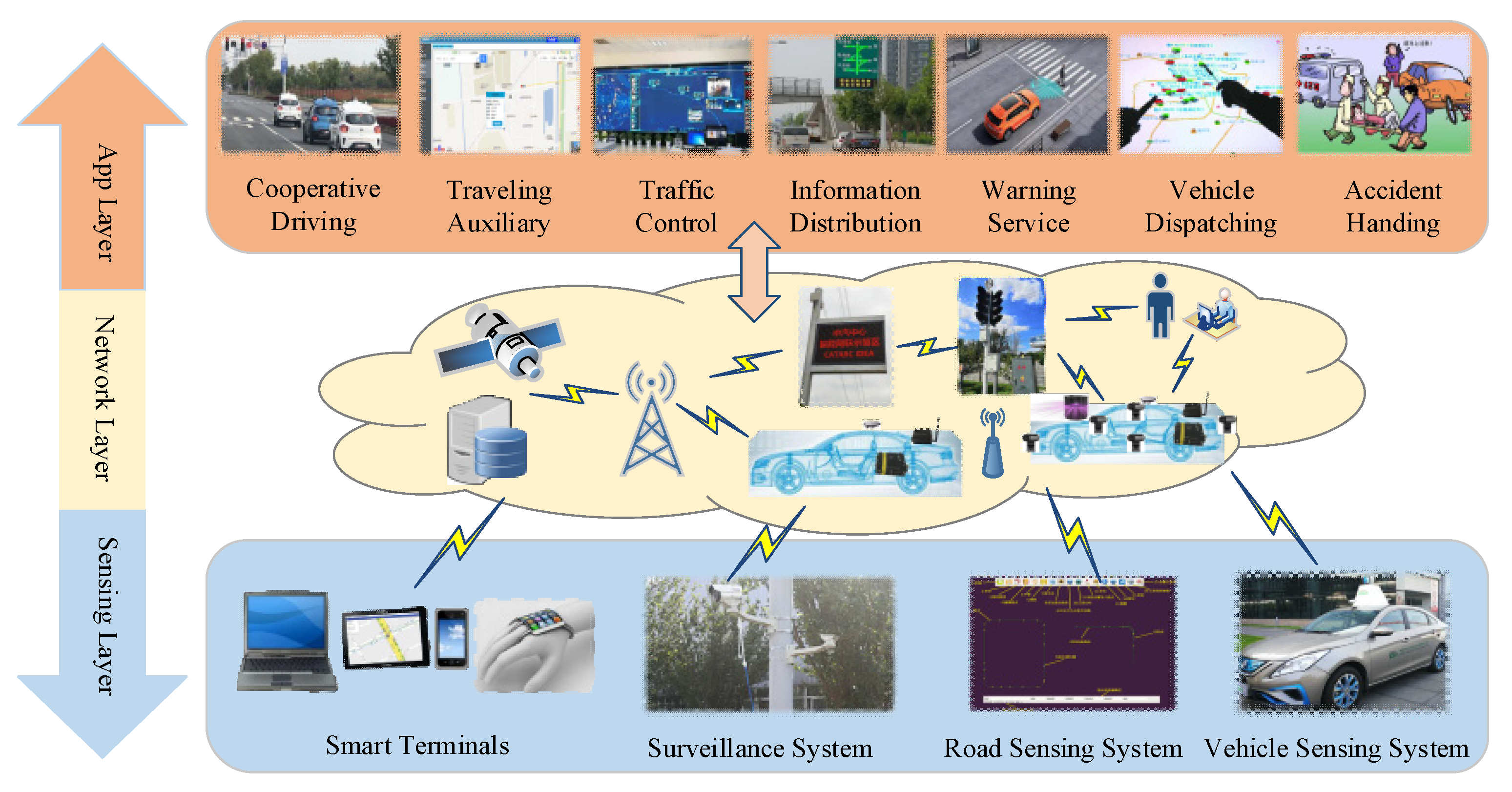
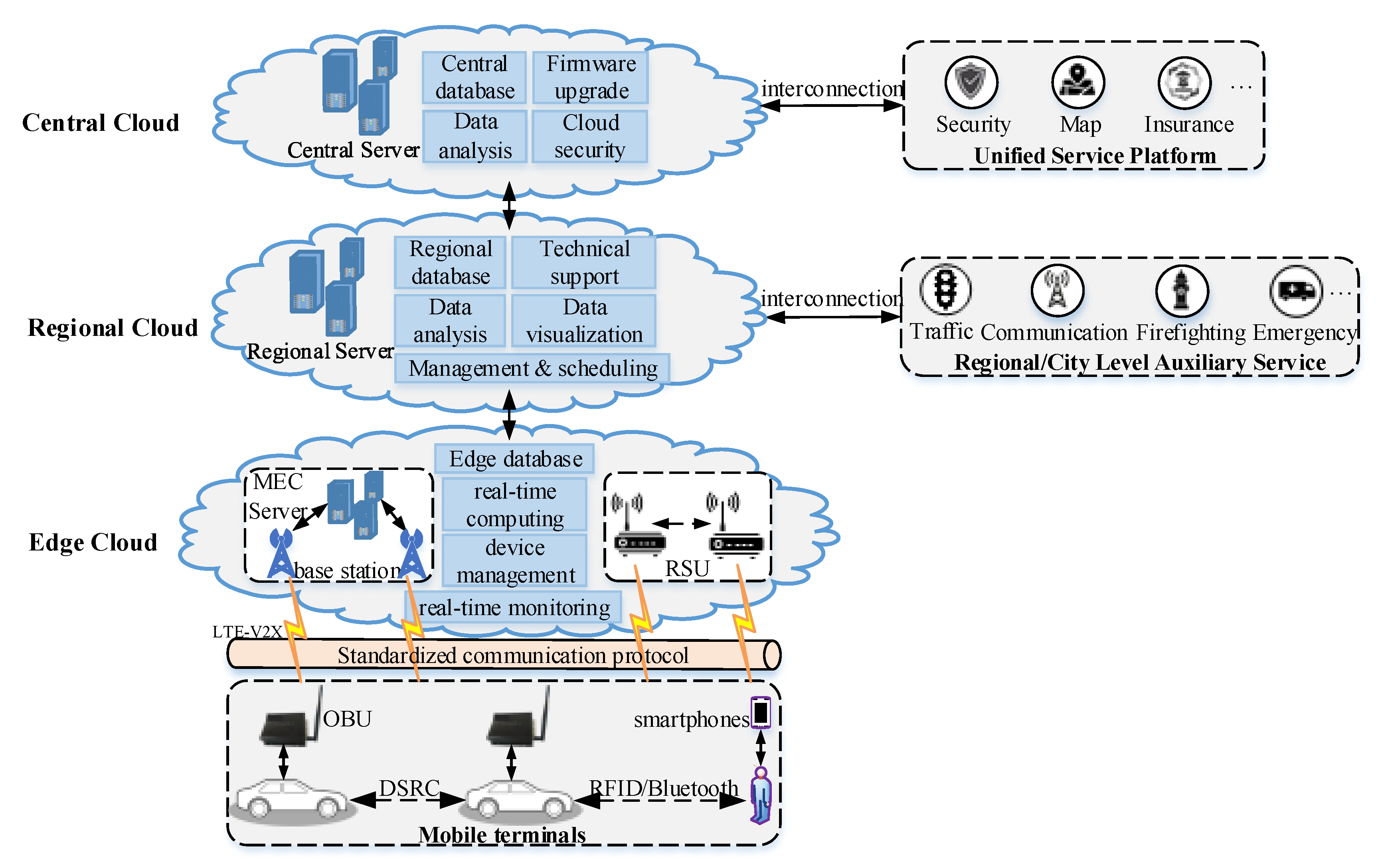
3.3.4. Forming Network Platform of the System
3.3.5. Marking the Overlap of Function Modules
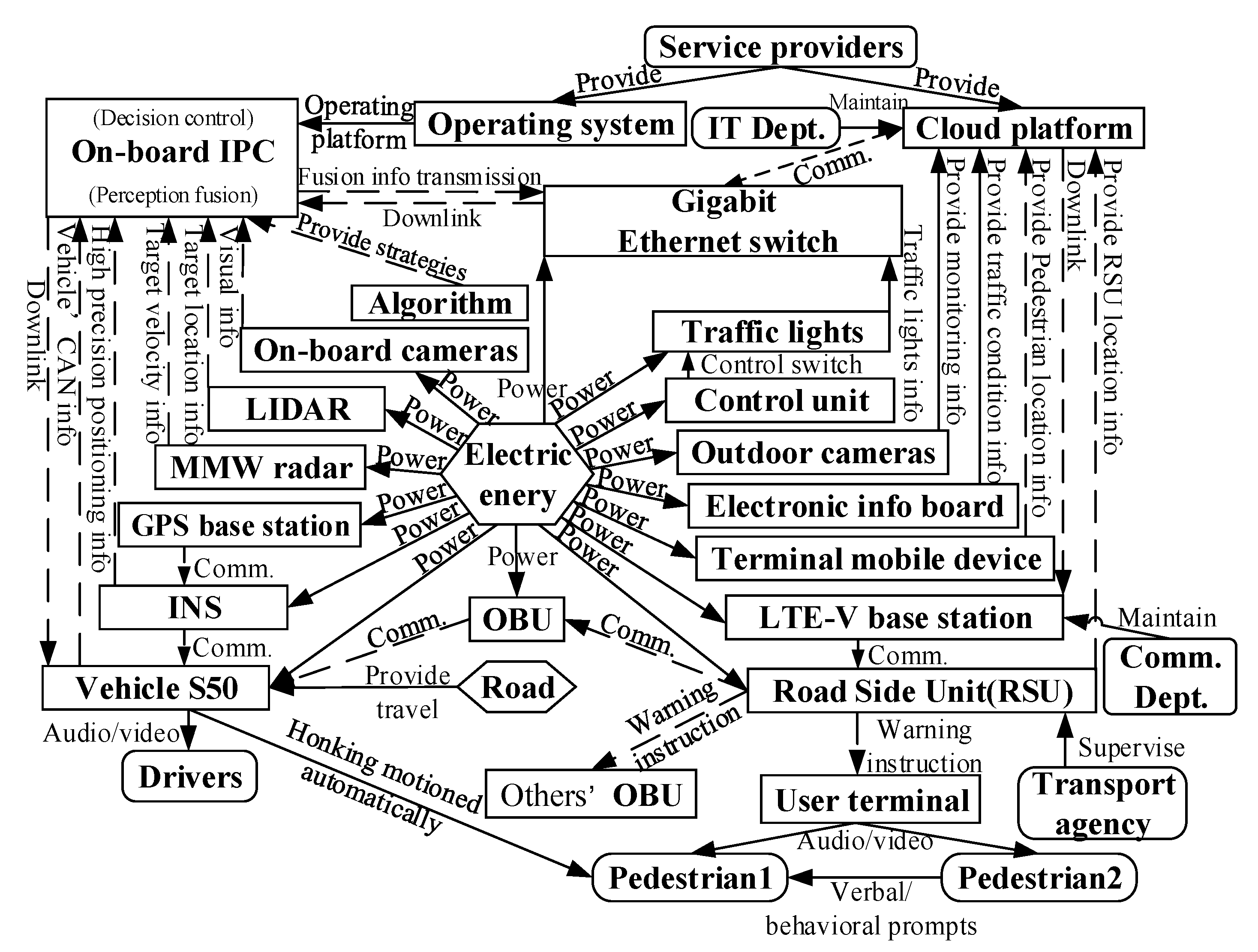
3.3.6. Building the Overall Function Model of Extended CWS
4. Case Study
4.1. Conceptual Model Development
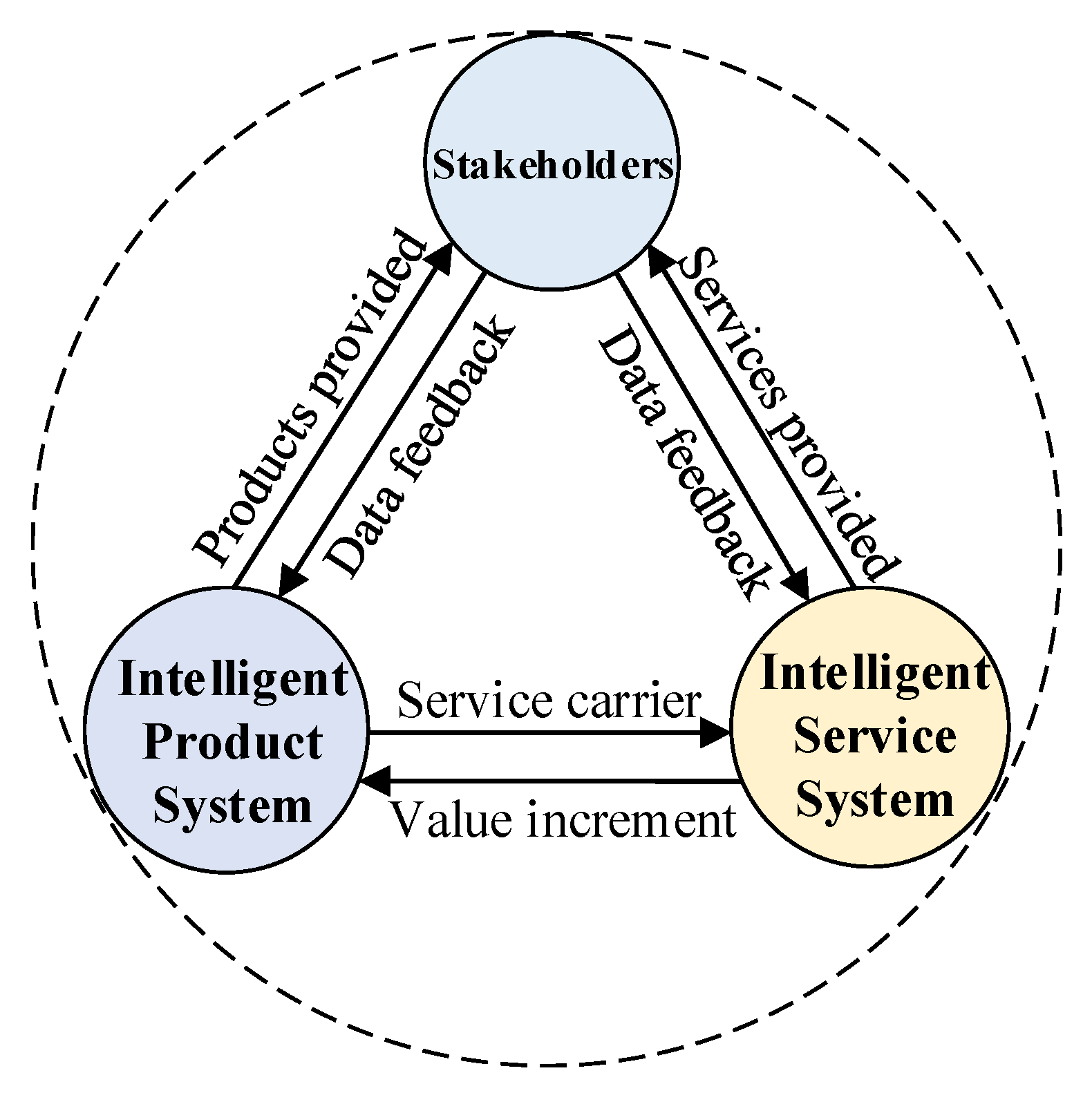
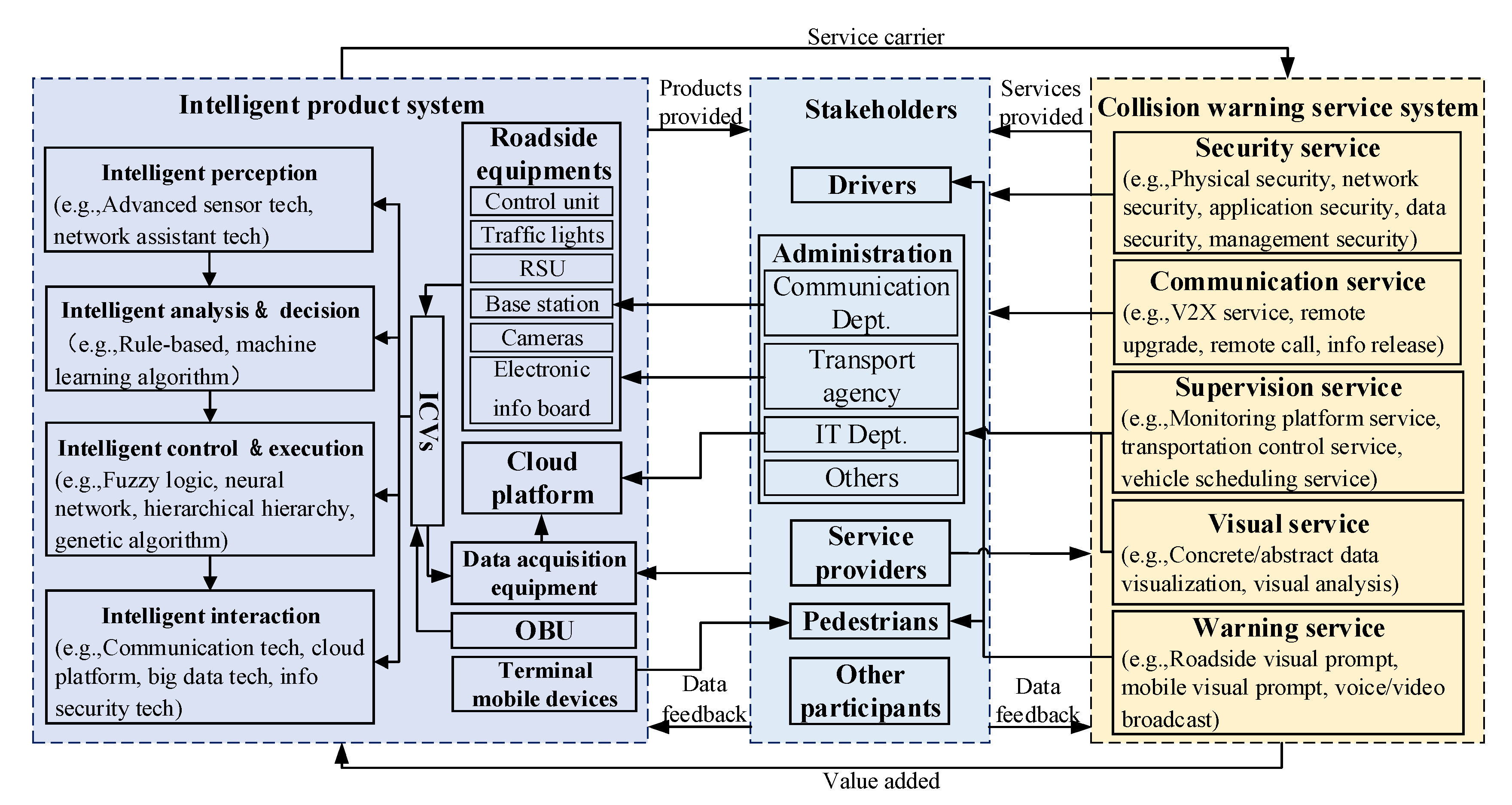
4.1.1. Extended CWS from the Perspective of Smart PSS
- the intelligent product system provides a convenient travel platform for stakeholders to receive warning services;
- the collision-warning service system provides high-quality travel services for stakeholders; and
- the stakeholders utilize the warning service as a convenient travel platform for a high-quality travel service and provide feedback to the intelligent product system and collision-warning service system.
4.1.2. Function Modeling of Extended CWS
4.2. Composition of Extended CWS and Discussion
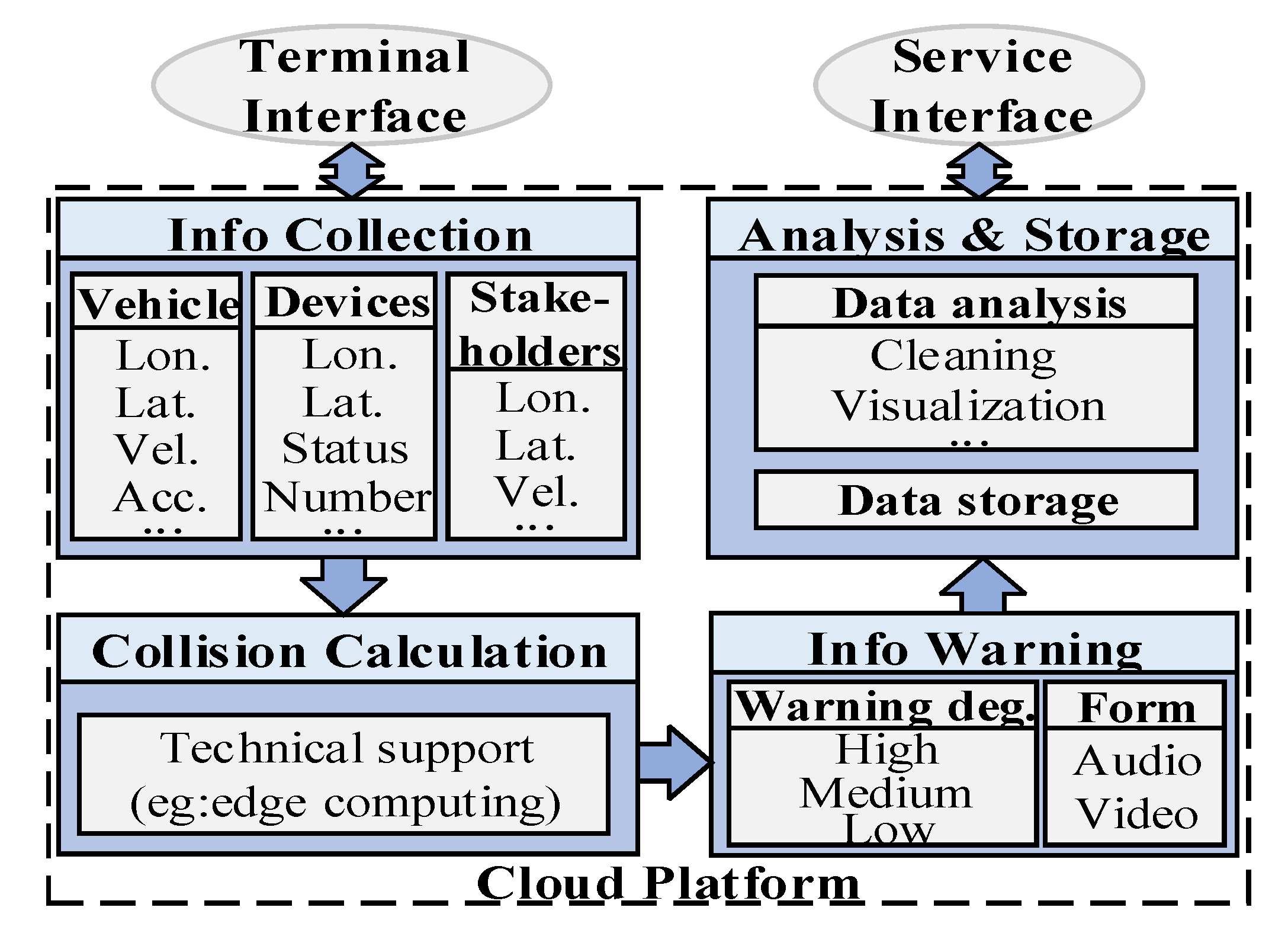
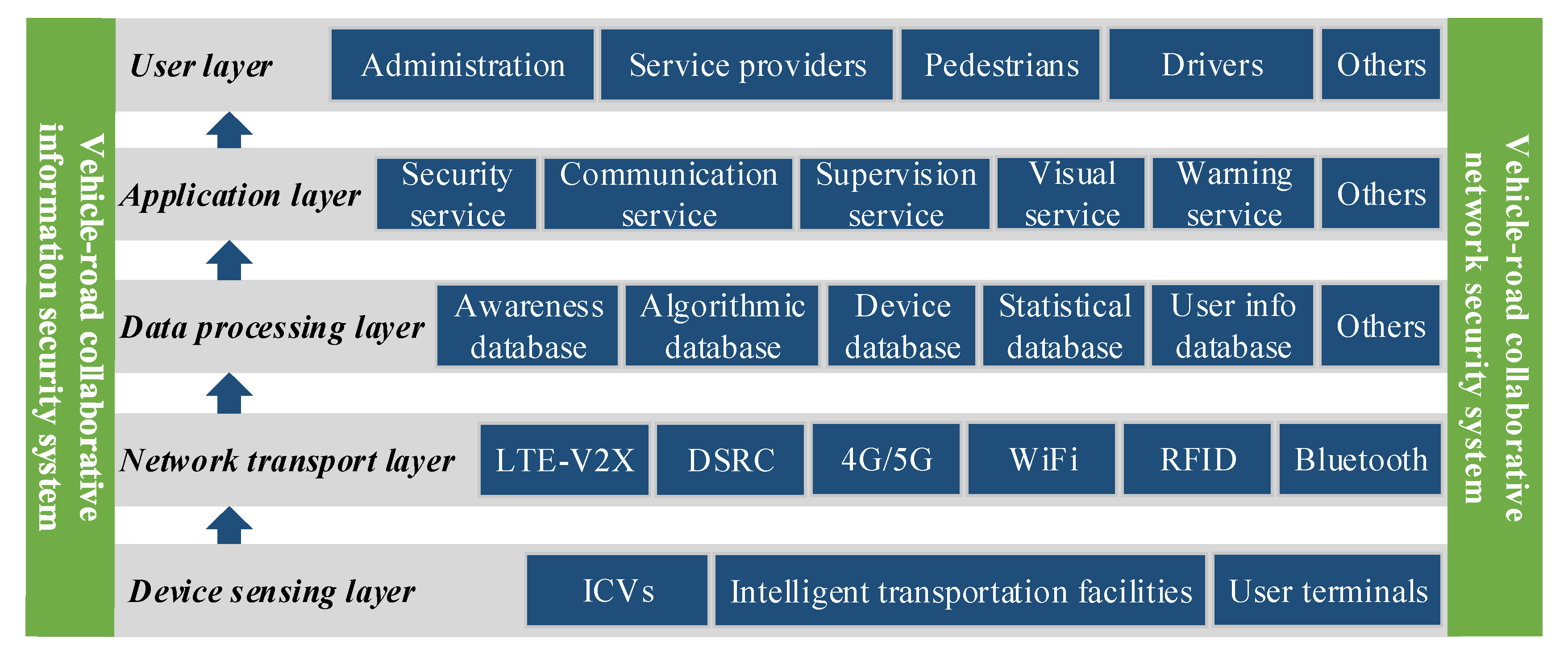
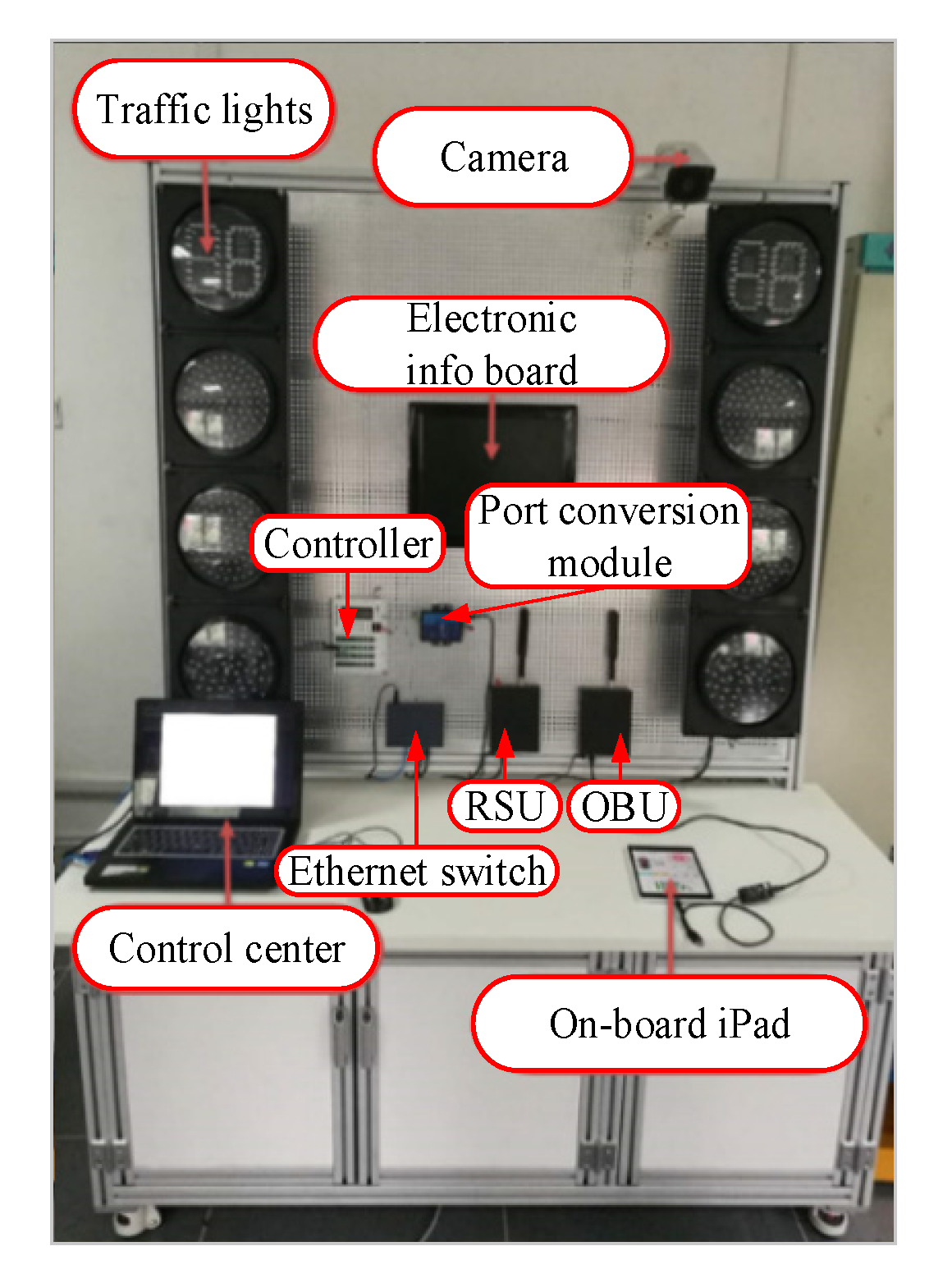
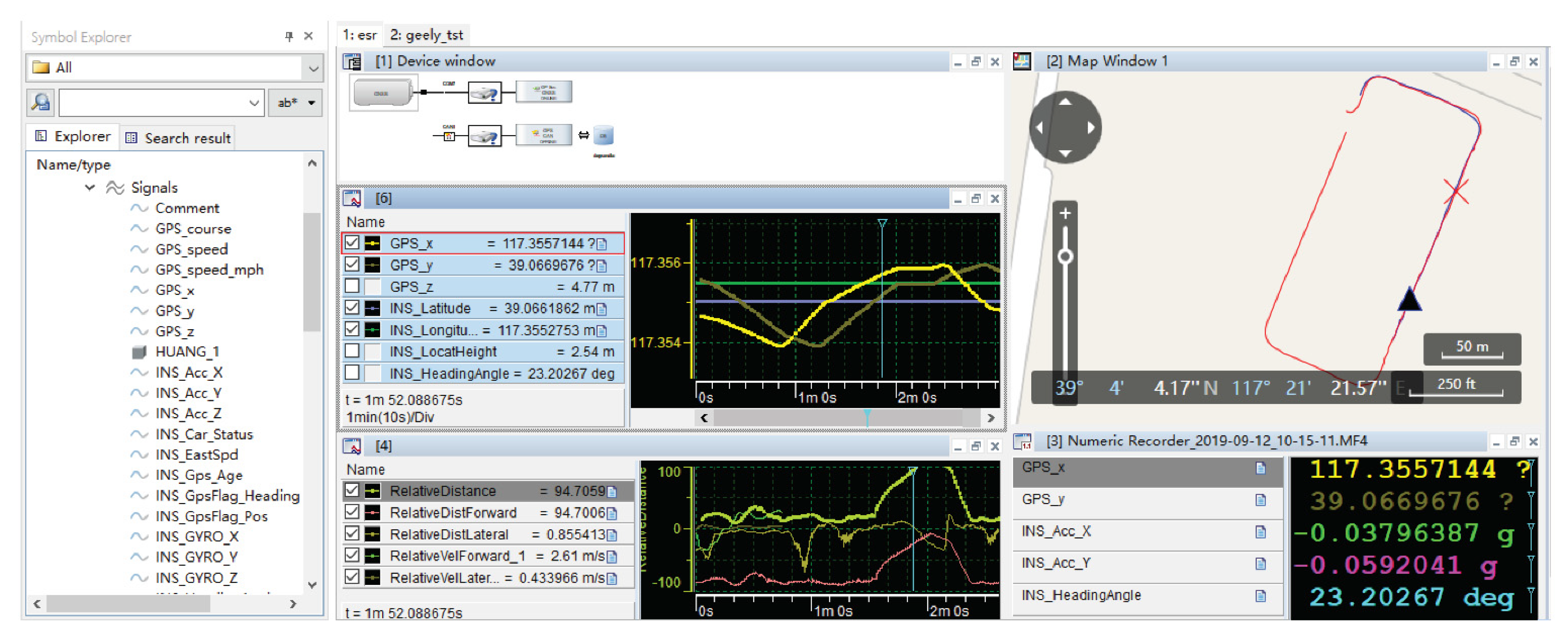
4.2.1. Composition of Extended CWS
- Location information

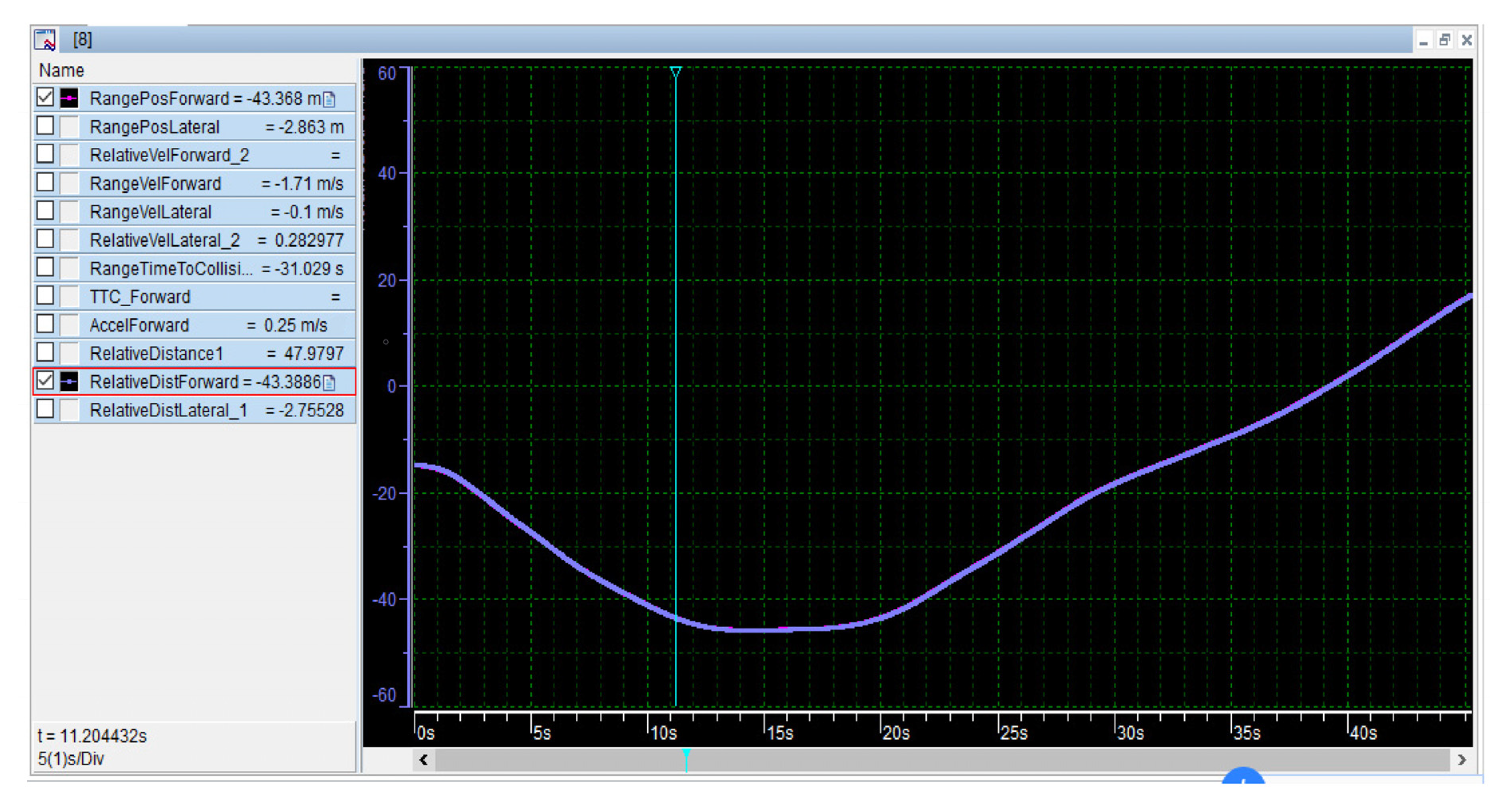
- b.
- Distance information
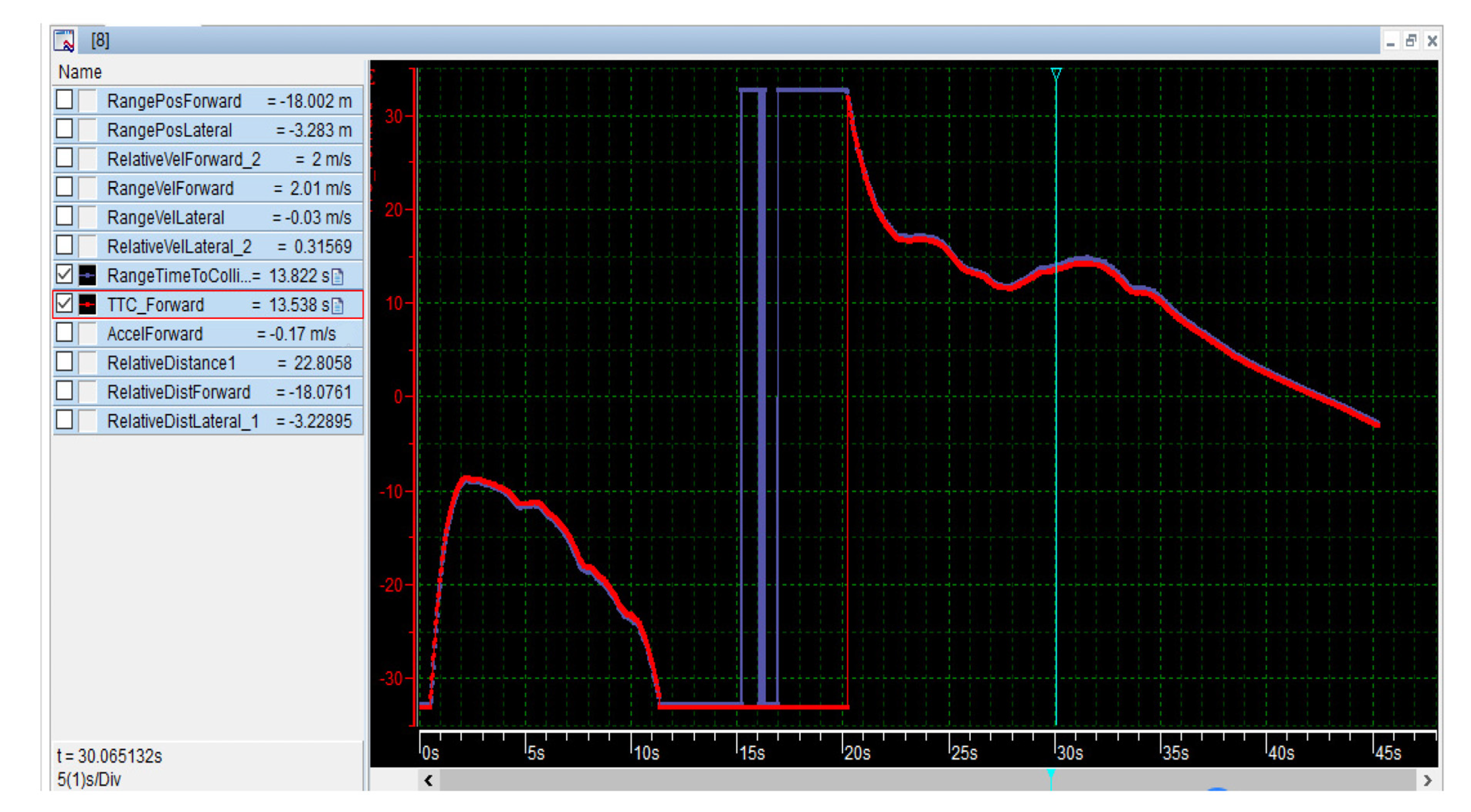
- c.
- Time-to-Collision information
4.2.2. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pessôa, M.V.P.; Becker, J.M.J. Overcoming the Product-Service Model Adoption Obstacles. Procedia CIRP 2017, 64, 163–168. [Google Scholar] [CrossRef]
- Zhang, Y.; Tao, F. Optimization of Manufacturing Systems Using the Internet of Things; Academic Press: New York, NY, USA, 2017; pp. 1–18. [Google Scholar]
- Cheng, J.; Xu, L.; Chen, W.; Tao, F.; Lin, C. Industrial IoT in 5G Environment towards Smart Manufacturing. J. Ind. Inf. Integr. 2018, 10, 10–19. [Google Scholar] [CrossRef]
- Liu, B.; Zhang, Y.; Zhang, G.; Zheng, P. Edge-cloud Orchestration Driven Industrial Smart Product- Service Systems Solution Design Based on CPS and IIoT. Adv. Eng. Inform. 2019, 42, 100984. [Google Scholar] [CrossRef]
- Tao, F.; Liu, W.; Liu, J.; Liu, X.; Liu, Q.; Qu, T.; Hu, T.; Zhang, Z.; Xiang, F.; Xu, W.; et al. Digital Twin and its Potential Application Exploration. Comput. Integr. Manuf. Syst. 2018, 24, 1–18. [Google Scholar] [CrossRef]
- Zhou, Y.; Wu, C.; Sun, J.; Liu, F.; Li, H. Function Model Construction Method Based on Digital Twin for Intelligent Products. Comput. Integr. Manuf. Syst. 2019, 25, 1392–1404. [Google Scholar] [CrossRef]
- Tao, F.; Liu, W.; Zhang, M.; Hu, T.; Qi, Q.; Zhang, H.; Sui, F.; Wang, T.; Xu, H.; Huang, Z.; et al. Five-dimension Digital Twin Model and its Ten Applications. Comput. Integr. Manuf. Syst. 2019, 25, 1–18. [Google Scholar] [CrossRef]
- Zheng, P.; Lin, T.J.; Chen, C.H.; Xu, X. A Systematic Design Approach for Service Innovation of Smart Product-service Systems. J. Clean. Prod. 2018, 201, 657–667. [Google Scholar] [CrossRef]
- Zheng, P.; Wang, Z.; Chen, C.H.; Li, P.K. A Survey of Smart Product-Service Systems: Key Aspects, Challenges and Future Perspectives. Adv. Eng. Inform. 2019, 42, 100973. [Google Scholar] [CrossRef]
- Chang, D.; Gu, Z.; Li, F.; Jiang, R. A User-centric Smart Product-Service System Development Approach: A Case Study on Medication Management for the Elderly. Adv. Eng. Inform. 2019, 42, 100979. [Google Scholar] [CrossRef]
- Paul, A.; Chauhan, R.; Srivastava, R.; Baruah, M. Advanced Driver Assistance Systems; SAE Technical Paper 2016-28-0223; SAE International: Warrendale, PA, USA, 2016. [Google Scholar] [CrossRef]
- Marbcrgcr, C.; Boslcr, F.; Dicdcrichs, F. Experimental Evaluation of Distributed Visual Warnings for ADAS. In Proceedings of the FISITA World Automotive Congress, Congress Proceedings-Mobility Concepts, Man Machine Interface, Process Challenges, Virtual Reality, Munich, Germany, 14–19 September 2008; Volume 1, pp. 185–192. [Google Scholar]
- Abdul, H.U.Z.; Saito, Y.; Zamzuri, H.; Abdul, R.M.A.; Raksincharoensak, P. A Review on Threat Assessment, Path Planning and Path Tracking Strategies for Collision Avoidance Systems of Autonomous Vehicles. Int. J. Veh. Auton. Syst. 2018, 14, 134–169. [Google Scholar] [CrossRef]
- Panou, M.C. Intelligent Personalized ADAS Warnings. Eur. Transp. Res. Rev. 2018, 10, 59. [Google Scholar] [CrossRef] [Green Version]
- Wu, C.; Zhu, T.; Zhang, P.; Sun, J.; Tan, R. Conceptual Scheme Construction of Smart PSS Based on Functional Model and AHP. Zhongguo Jixie Gongcheng 2020, 31, 853–864+870. [Google Scholar] [CrossRef]
- Zhang, P.; Nie, Z.; Dong, Y.; Zhang, Z.; Yu, F.; Tan, R. Smart Concept Design Based on Recessive Inheritance in Complex Electromechanical System. Adv. Eng. Inform. 2020, 43, 101010. [Google Scholar] [CrossRef]
- Chang, W.T.; Tseng, C.H.; Wu, L.L. Conceptual innovation of a prosthetic hand using TRIZ. J. Chin. Soc. Mech. Eng. 2008, 29, 111–120. [Google Scholar]
- Kamarudin, K.M.; Ridgway, K.; Hassan, M.R. Modelling Constraints in the Conceptual Design Process with TRIZ and F3. Procedia CIRP 2016, 39, 3–8. [Google Scholar] [CrossRef]
- Liu, X.; Huang, S.; Chen, Y. Research and Application: Conceptual Integrated Model Based on TRIZ and Bionics for Product Innovation. Int. J. Interact. Des. Manuf. 2017, 11, 341–349. [Google Scholar] [CrossRef]
- Huang, S.; Liu, X.; Ai, H. Research on Application of Process Model for Product Concept Creative Design Based on TRIZ and TOC. Int. J. Interact. Des. Manuf. 2017, 11, 957–966. [Google Scholar] [CrossRef]
- Liu, X.; Huang, S.; Wang, J.; Lin, G. Conceptual Design Based on TRIZ & Function Analogy for Product Innovation. Jixie Gongcheng Xuebao 2016, 52, 34–42. [Google Scholar] [CrossRef]
- Liu, X.; Huang, S.; Chen, Z.; Luo, X. Conceptual Innovation Design of Seaweed Planter Manipulator Based on TRIZ & AD and Reliability Analysis. Jixie Gongcheng Xuebao 2016, 52, 40–46. [Google Scholar] [CrossRef]
- Valencia, A.; Mugge, R.; Schoormans, J.P.L.; Schifferstein, H.N. Characteristics of Smart PSSs: Design Considerations for Value Creation. In Proceedings of the CADMC 2013: 2nd Cambridge Academic Design Management Conference, Cambridge, UK, 4–5 September 2013. [Google Scholar]
- Kuhlenkötter, B.; Wilkens, U.; Bender, B.; Abramovici, M.; Süße, T.; Göbel, J.; Herzog, M.; Hypki, A.; Lenkenhoff, K. New Perspectives for Generating Smart PSS Solutions-Life Cycle, Methodologies and Transformation. Procedia CIRP 2017, 64, 217–222. [Google Scholar] [CrossRef]
- Chowdhury, S.; Haftor, D.; Pashkevich, N. Smart Product-Service Systems (smart PSS) in Industrial Firms: A Literature Review. Procedia CIRP 2018, 73, 26–31. [Google Scholar] [CrossRef]
- Li, H.; Tao, F.; Wen, X.; Wang, H.; Luo, G. Modular Design of Product-Service Systems Oriented to Mass Personalization. Zhongguo Jixie Gongcheng 2018, 29, 2204–2214+2249. [Google Scholar] [CrossRef]
- Zhang, W.; Ding, J.; Ji, Y.; Xia, W.; Lan, H.; Zhang, J. Modular Design of Intelligent Service Based on Industrial Big Data. Zhongguo Jixie Gongcheng 2019, 30, 167–173+182. [Google Scholar] [CrossRef]
- Meyer, G.G.; Främling, K.; Holmström, J. Intelligent Products: A Survey. Comput. Ind. Eng. 2009, 60, 137–148. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Lan, X.; Li, Y.; Cai, L.; Pan, J. Efficient Computation Resource Management in Mobile Edge-cloud Computing. IEEE Internet Things J. 2018, 6, 3455–3466. [Google Scholar] [CrossRef]
- Lee, C.H.; Chen, C.H.; Trappey, A.J.C. A Structural Service Innovation Approach for Designing Smart Product Service Systems: Case Study of Smart Beauty Service. Adv. Eng. Inform. 2019, 40, 154–167. [Google Scholar] [CrossRef]
- Poeppelbuss, J.; Durst, C. Smart Service Canvas—A Tool for Analyzing and Designing Smart Product- Service Systems. Procedia CIRP 2019, 83, 324–329. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, C.H.; Zheng, P.; Li, X.; Khoo, L.P. A Novel Data-driven Graph-based Requirement Elicitation Framework in the Smart Product-Service System Context. Adv. Eng. Inform. 2019, 42, 100983. [Google Scholar] [CrossRef]
- Watanabe, K.; Okuma, T.; Takenaka, T. Evolutionary Design Framework for Smart PSS: Service Engineering Approach. Adv. Eng. Inform. 2020, 45, 101119. [Google Scholar] [CrossRef]
- Liu, L.; Song, W.; Han, W. How Sustainable is Smart PSS? An Integrated Evaluation Approach Based on Rough BWM and TODIM. Adv. Eng. Inform. 2020, 43, 101042. [Google Scholar] [CrossRef]
- Yu, Y.; Fu, Z. Embedded Advance Collision Warning System: Vehicle Images Ranging System Based on Machine Vision. In Proceedings of the 2009 International Conference on Information Engineering and Computer Science, Wuhan, China, 19–20 December 2009. [Google Scholar] [CrossRef]
- Chen, C.L.; Hsu, C.W.; Wu, C.M. A DSRC-based Collision Warning and Autonomous System for Inter-vehicle Communication. In Proceedings of the 2011 Cross Strait Quad-Regional Radio Science and Wireless Technology Conference, Harbin, China, 26–30 July 2011; Volume 1, pp. 816–821. [Google Scholar] [CrossRef]
- Gunasinghe, D.; Lawson, K.K.K.; Strydom, R.; Srinivasan, M. A Mid-air Collision Warning System: Performance Comparison Using Simulated ADS-B, Radar and Vision Sensor Inputs. In Proceedings of the IEEE 2018 International Conference on Unmanned Aircraft Systems, Dallas, TX, USA, 12–15 June 2018; Volume 1, pp. 816–825. [Google Scholar] [CrossRef]
- Dabbour, E.; Easa, S. Proposed Collision Warning System for Right-turning Vehicles at Two-way Stop-controlled Rural Intersections. Transp. Res. Part C Emerg. Technol. 2014, 42, 121–131. [Google Scholar] [CrossRef]
- Milanés, V.; Pérez, J.; Godoy, J.; Onieva, E. A Fuzzy Aid Rear-end Collision Warning/Avoidance System. Expert Syst. Appl. 2012, 39, 9097–9107. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Jing, S.; Hui, F.; Liu, R.; Khattak, A.J. DSRC-based Rear-end Collision Warning System—An Error-component Safety Distance Model and Field Test. Transp. Res. Part C Emerg. Technol. 2019, 107, 92–104. [Google Scholar] [CrossRef]
- Lee, D.; Tak, S.; Park, S.; Yeo, H. Real-time Associative Memory-based Rear-end Collision Warning System. Transp. Res. Rec. J. Transp. Res. Board 2017, 2621, 1–9. [Google Scholar] [CrossRef]
- Santos-González, I.; Caballero-Gil, P.; Rivero-García, A.; Caballero-Gil, C. Priority and Collision Avoidance System for Traffic Lights. Ad Hoc Netw. 2019, 94, 101931. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, X.; Hu, J. Impact on Car Following Behavior of a Forward Collision Warning System with Headway Monitoring. Transp. Res. Part C Emerg. Technol. 2020, 111, 226–244. [Google Scholar] [CrossRef]
- Wang, J.; Gao, F.; Xu, G.; Yao, S. Application of Machine Vision to Vehicle Automatic Collision Warning Algorithm. J. Beijing Inst. Technol. 2008, 17, 25–29. [Google Scholar] [CrossRef]
- Yu, Z.; Yuan, Z.; Leng, B.; Xiong, L. Adaptive Collision Warning System Based on Driver Face Detection. Intern. Combust. Engine Parts 2020, 2020, 198–201. [Google Scholar] [CrossRef]
- Wang, H.; Gu, M.; Wu, S.; Wang, C. A Driver’s Car-following Behavior Prediction Model Based on Multi-sensors Data. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 10. [Google Scholar] [CrossRef]
- Huang, H.; Yang, M.; Wang, C.; Wang, B. Collision Warning System Based on Forward Vehicle Behavior Recognition. J. Huazhong Univ. Sci. Technol. 2015, 43, 117–121. [Google Scholar] [CrossRef]
- Lee, D.; Yeo, H. Real-time Rear-end Collision Warning System using Multilayer Perceptron Neural Networks. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3087–3097. [Google Scholar] [CrossRef]
- Huang, J.; Tan, H. Error Analysis and Performance Evaluation of a Future-Trajectory-Based Cooperative Collision Warning System. IEEE Trans. Intell. Transp. Syst. 2009, 10, 175–180. [Google Scholar] [CrossRef]
- Lee, S.H.; Lee, S.; Kim, M.H. Development of a Driving Behavior-Based Collision Warning System Using a Neural Network. Int. J. Automot. Technol. 2018, 19, 837–844. [Google Scholar] [CrossRef]
- Lee, D.; Yeo, H. A study on the rear-end collision warning system by considering different perception-reaction time using multi-layer perceptron neural network. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; pp. 24–30. [Google Scholar] [CrossRef]
- Kim, H.; Lee, Y.; Woo, T.; Kim, H. Integration of vehicle and lane detection for forward collision warning system. In Proceedings of the 2016 IEEE 6th International Conference on Consumer Electronics-Berlin (ICCE-Berlin), Berlin, Germany, 5–7 September 2016; pp. 5–8. [Google Scholar] [CrossRef]
- Wang, H.; Xie, L.; Lu, Y.; Gao, J.; Zeng, Q. Research of Vehicle Collision Warning System. Appl. Mech. Mater. 2012, 220, 1602–1605. [Google Scholar] [CrossRef]
- Tukker, A. Eight Types of Product-Service System: Eight Ways to Sustainability? Experiences from SusProNet. Bus. Strategy Environ. 2004, 13, 246–260. [Google Scholar] [CrossRef]
- Tan, R.H. TRIZ and Application; Higher Education Press: Beijing, China, 2010; pp. 19–24. [Google Scholar]
- Zhang, H.G. Innovation Design: Systematic Innovation Based on TRIZ; China Machine Press: Beijing, China, 2017; pp. 62–67. [Google Scholar]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | The Author(s) | Definitions |
|---|---|---|
| 2013 | Valencia et al. [23] | Intelligent products and e-services are integrated into a single solution through ICT technologies. |
| 2017 | Kuhlenkötter et al. [24] | Digital connectivity between components enables autonomous interaction and further development of products and services as a result of digitalization. |
| 2018 | Zheng et al. [8,9] | A business strategy of IT-led value co-creation, involving different stakeholders as participants, smart systems as infrastructure, SCPs as the medium, and the e-services they generate as the primary value, is continuously committed to meeting customer needs in a sustainable manner. |
| 2018 | Chowdhury et al. [25] | A combination and interaction based on smart technologies, physical products, services, and business models to meet user demands. |
| 2019 | Chang et al. [10] | Product and service integration is achieved by integrating stakeholders and capturing user requirements in the physical environment and building databases in the cloud environment. |
| Engineering System | Components | Supersystems |
|---|---|---|
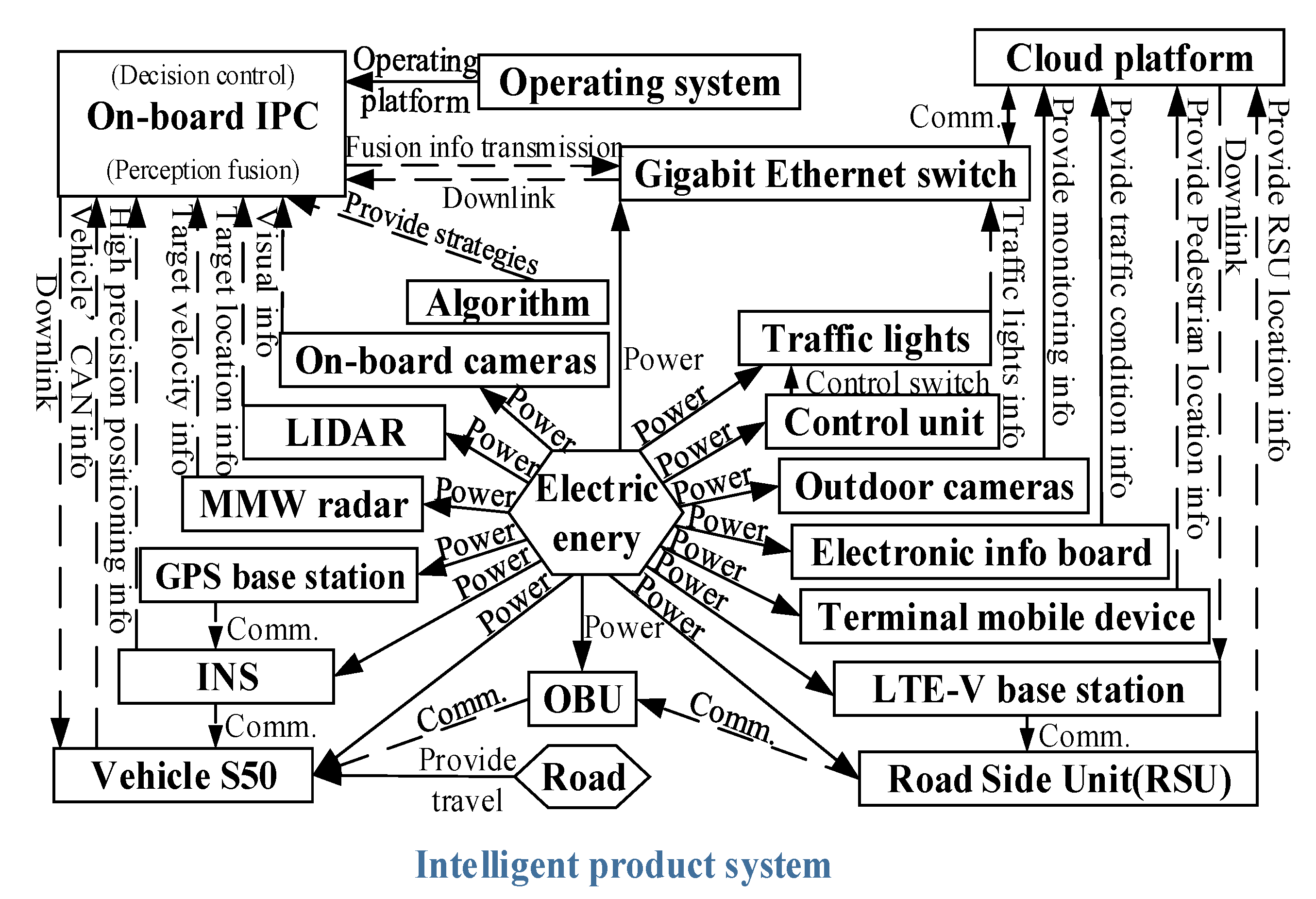
| The extended CWS | vehicle S50, Inertial Navigation System (INS), differential GPS base station, millimeter-wave radar (MMW radar), LIDAR, on-board cameras, on-board Industrial Personal Computer (IPC), operating system, algorithms, gigabit Ethernet switch, traffic lights, control unit, outdoor cameras, electronic information board, terminal mobile device, LTE-V base station, Road Side Unit (RSU), On-Board Unit (OBU), V2X communication system, cloud platforms, etc. | road environment, electric energy, stakeholders (drivers, pedestrians, transport agency, communication department, IT department, service providers, etc.) |
| Elements | Function Description | Interaction Type | Problematic Function | |
|---|---|---|---|---|
| Supersystem(s) | road environment | Provides travel conditions. | standard | |
| electric energy | Power supply. | standard | ||
| stakeholders | Provides relevant services and receives warning services. | standard | ||
| Components | vehicle S50 | Provides travel tools. | standard | |
| INS | Provides precision localization information. | insufficient | √ | |
| differential GPS base station | Precise localization. | insufficient | √ | |
| MMW radar | Provides the speed information of the target. | insufficient | √ | |
| LIDAR | Provides location information of the target. | insufficient | √ | |
| on-board cameras | Provides surrounding information to the cloud. | insufficient | √ | |
| on-board IPC | Realizes data fusion and decision control. | insufficient | √ | |
| operating system | Provides operating platform for IPC. | standard | ||
| algorithms | Provides strategies for IPC. | insufficient | √ | |
| gigabit Ethernet switch | Realizes the information exchange between IPC, roadside facility, and cloud. | insufficient | √ | |
| traffic lights | Provides traffic signal information. | standard | ||
| control unit | Implement control operation. | standard | ||
| outdoor cameras | Provides traffic information. | standard | ||
| electronic information board | Displays real-time traffic information. | standard | ||
| terminal mobile device | Human-machine interaction. | standard | ||
| LTE-V base station | Connects the cloud and the terminals. | insufficient | √ | |
| RSU | Real-time communication with OBU. | standard | ||
| OBU | Real-time communication with RSU. | standard | ||
| V2X communication system | Provides real-time communication. | insufficient | √ | |
| cloud platforms | Provides real-time cloud computing. | standard | ||
| Product(s) | stakeholders | Provides relevant services and receive warning services. | standard | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, C.; Lv, H.; Zhu, T.; Liu, Y.; Pessôa, M.V.P. Conceptual Modeling of Extended Collision Warning System from the Perspective of Smart Product-Service System. Sensors 2022, 22, 4654. https://doi.org/10.3390/s22124654
Wu C, Lv H, Zhu T, Liu Y, Pessôa MVP. Conceptual Modeling of Extended Collision Warning System from the Perspective of Smart Product-Service System. Sensors. 2022; 22(12):4654. https://doi.org/10.3390/s22124654
Chicago/Turabian StyleWu, Chunlong, Hanyu Lv, Tianming Zhu, Yunhe Liu, and Marcus Vinicius Pereira Pessôa. 2022. "Conceptual Modeling of Extended Collision Warning System from the Perspective of Smart Product-Service System" Sensors 22, no. 12: 4654. https://doi.org/10.3390/s22124654
APA StyleWu, C., Lv, H., Zhu, T., Liu, Y., & Pessôa, M. V. P. (2022). Conceptual Modeling of Extended Collision Warning System from the Perspective of Smart Product-Service System. Sensors, 22(12), 4654. https://doi.org/10.3390/s22124654