
A Novel Path Planning Strategy for a Cleaning Audit Robot Using Geometrical Features and Swarm Algorithms

 ,
,  ,
,  , and
, and
Abstract
:1. Introduction
- for a large environment, collecting samples uniformly across the complete region are not time-efficient
- the dirt accumulation pattern is chaotic and often clustered in regions left unattended by cleaning robots.
- lack of an effective method that determines from where to gather dirt samples for an effective cleaning auditing.
- formulate the dirt location identification method by extracting the geometrical signatures from the environment
- devise an efficient path that connects all the identified dirt location (i.e., sample locations) by minimizing the energy cost
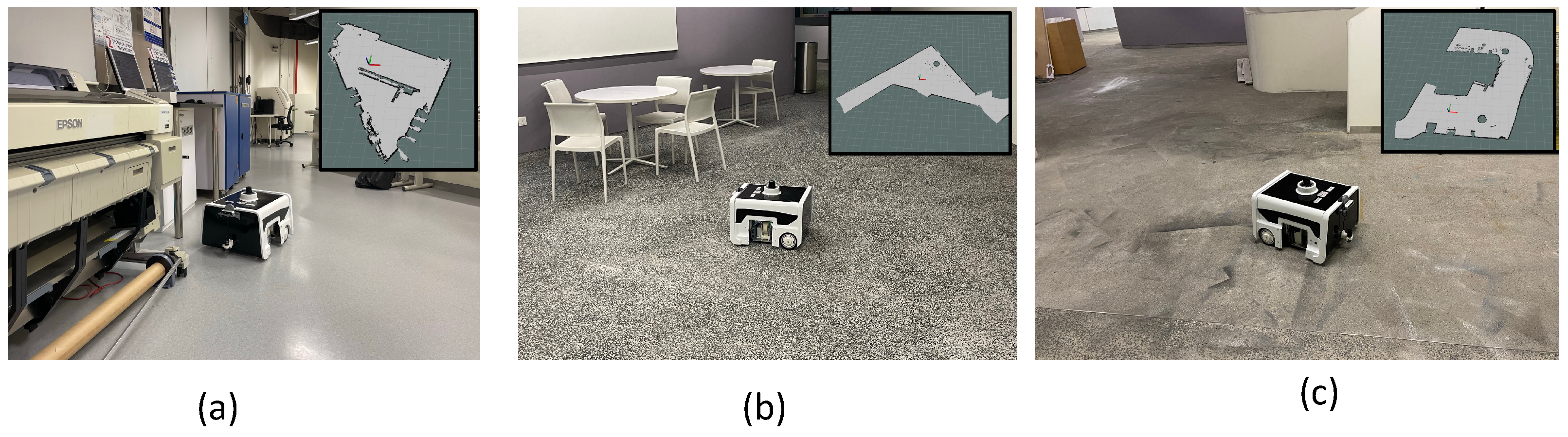
- validate the geometry-based dirt location identification in a real environment after repeated cleaning trials
- experimentally validate the optimal path generated by the proposed method in a real environment using an in-house developed cleaning audit robot
2. Related Works
2.1. Geometrical Feature Extraction
2.2. Optimal Path Generation
3. System Overview
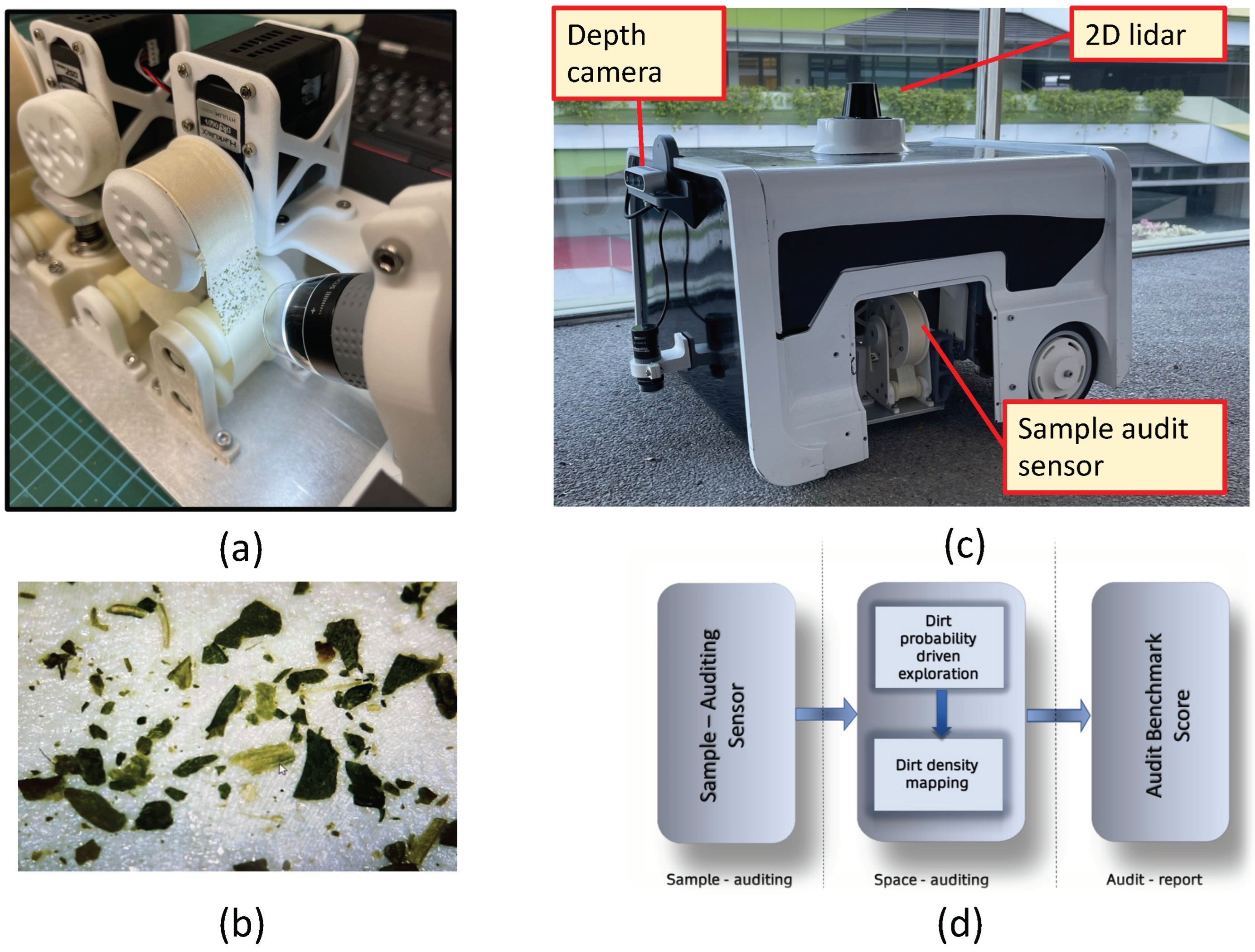
3.1. Cleaning Auditing Overview
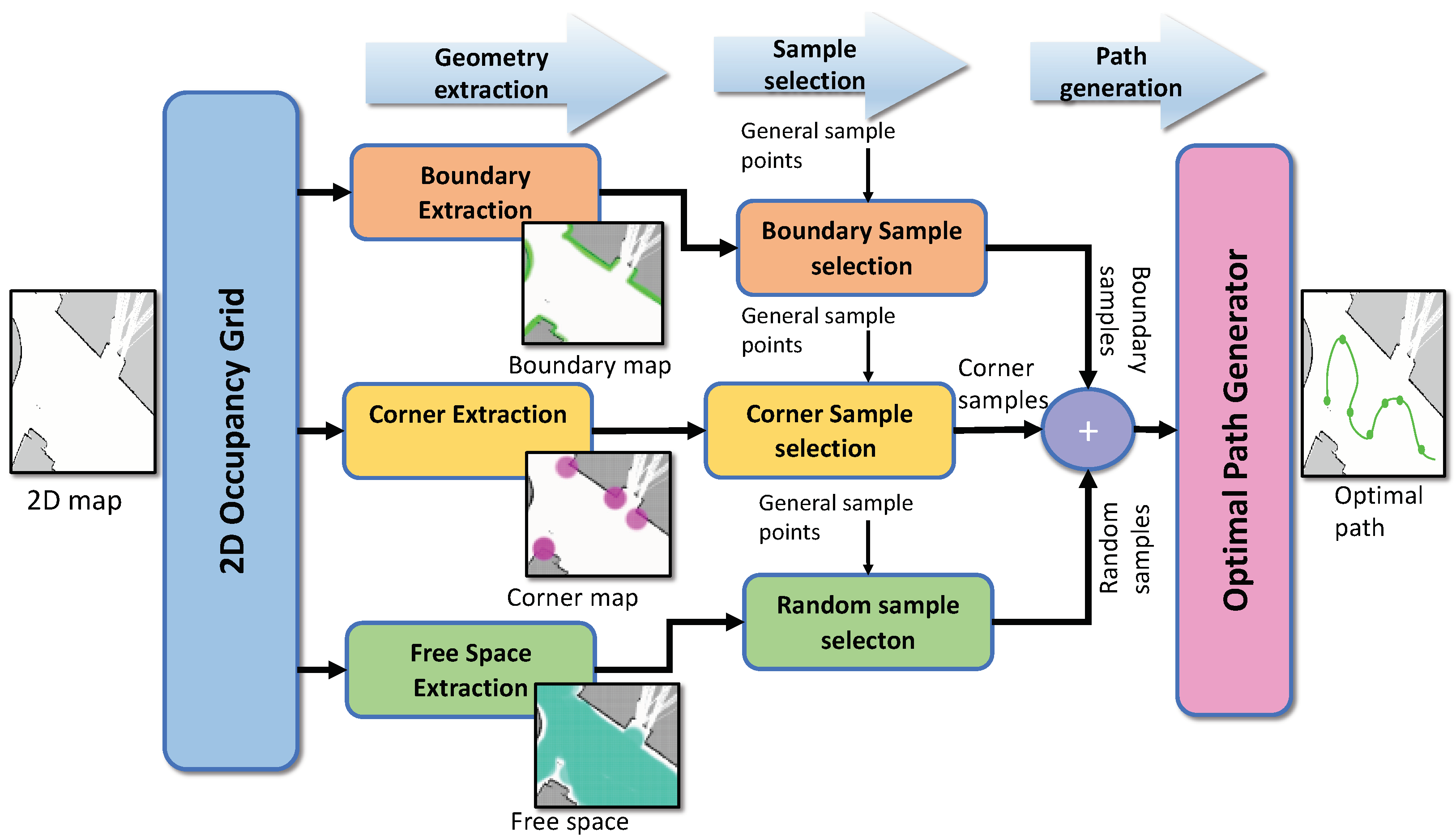
3.2. Path Generation Overview
4. Dirt Location Identification
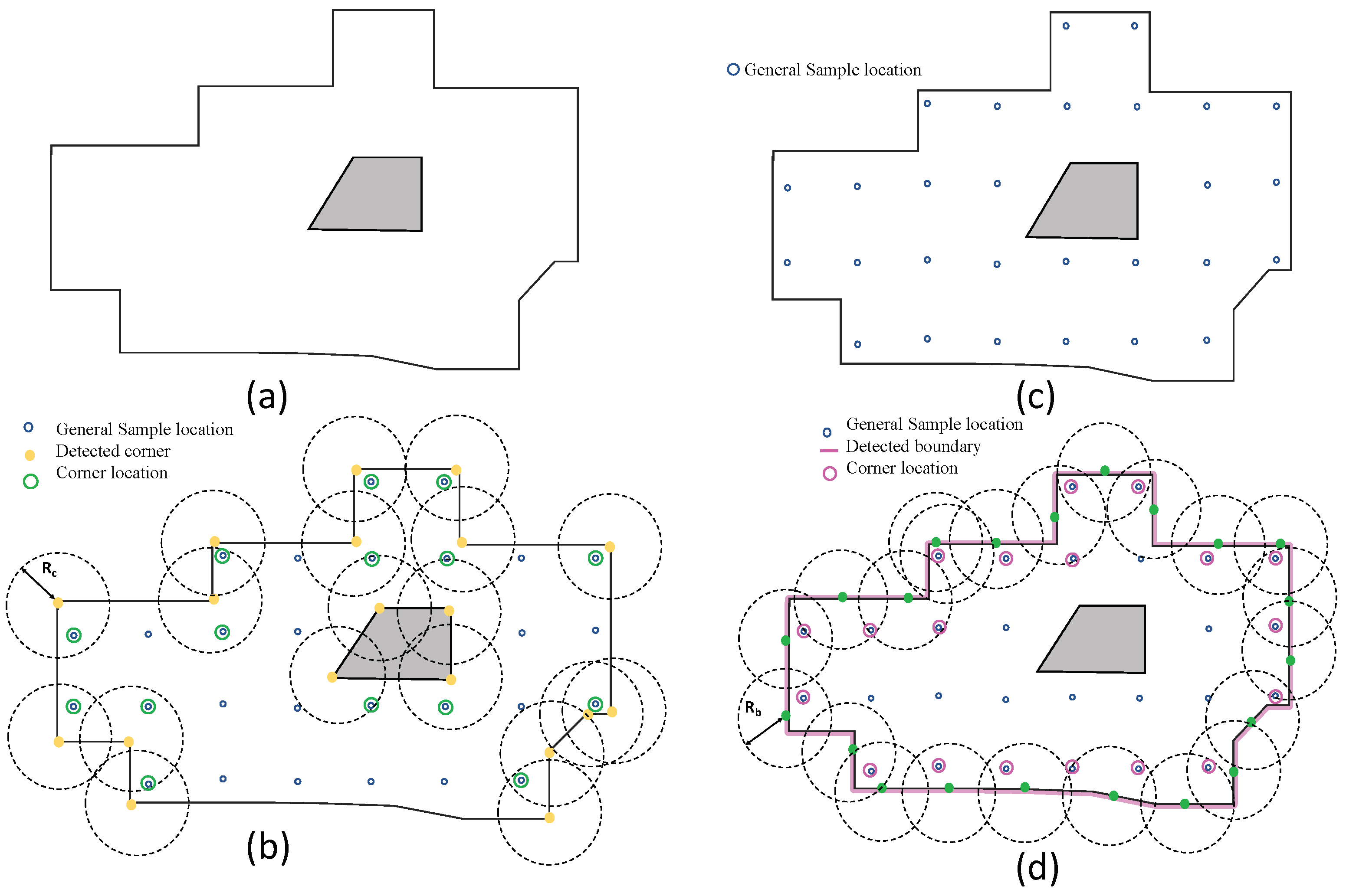
4.1. Boundary Sample Extraction
- General sample location identification: The general sample locations are obtained by sampling the free space in a uniform fashion. The general sample location is obtained by grid sampling the occupancy grid in intervals and along rows and columns.
- Occupancy grid thresholding: Each cell in an occupancy grid shows the probability of occupancy. A two state binary map B has been generated by applying a thresolding such that if else , where is the occupancy grid and is the maximum occupancy threshold.
- Boundary extraction: On the binary map, we used Zhang-Suen thinning algorithm [50] for extracting the contours. However, the contour extraction results in detecting all closed contours in the occupancy grid, including the undesirable contours that form over the obstacles. The largest contour from all the set of contours is regarded as the boundary region.
- Selection of boundary location: The contour corresponding to the boundary region is sampled in a regular interval to obtain a set of points that lies on the contour. The boundary locations are selected from the general sample points that lie in the distance less than .
4.2. Corner Sample Extraction
- The general sample location is identified by performing uniform sampling of occupancy grid .
- Corner extraction: The machine learning-based fast corner extraction algorithm [39] is used for identifying the corner locations.
- Selection of corner location: Similar to the boundary location identification, the corner locations are selected from the general sample points that lie in the distance less than .
Random Samples
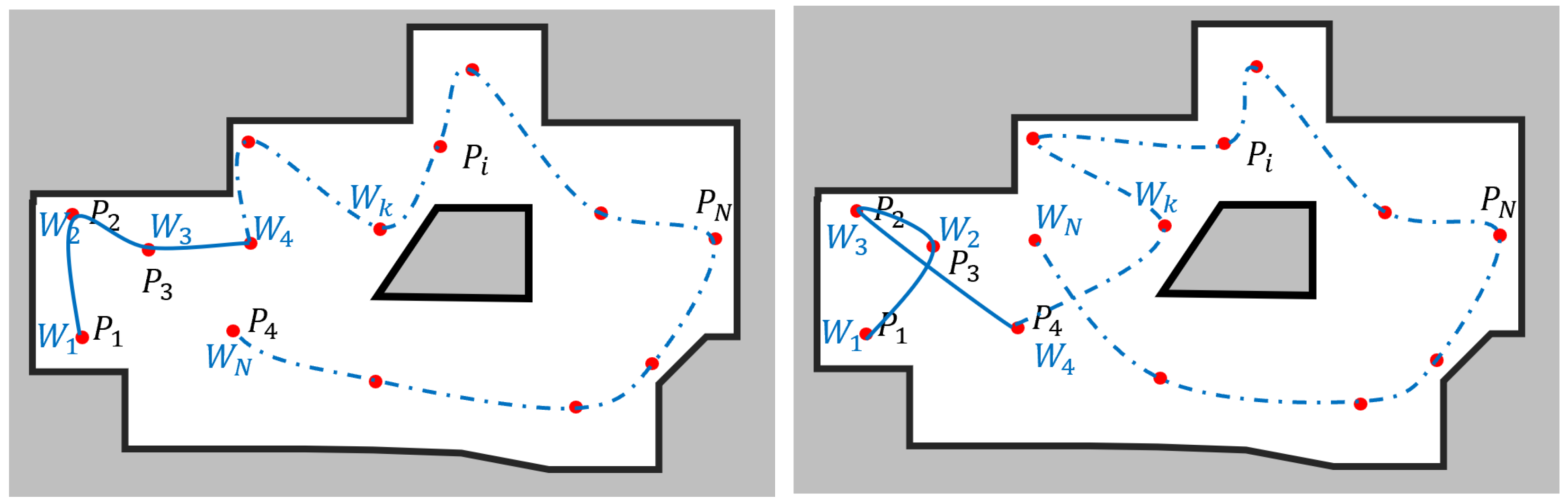
5. Optimal Path Planing
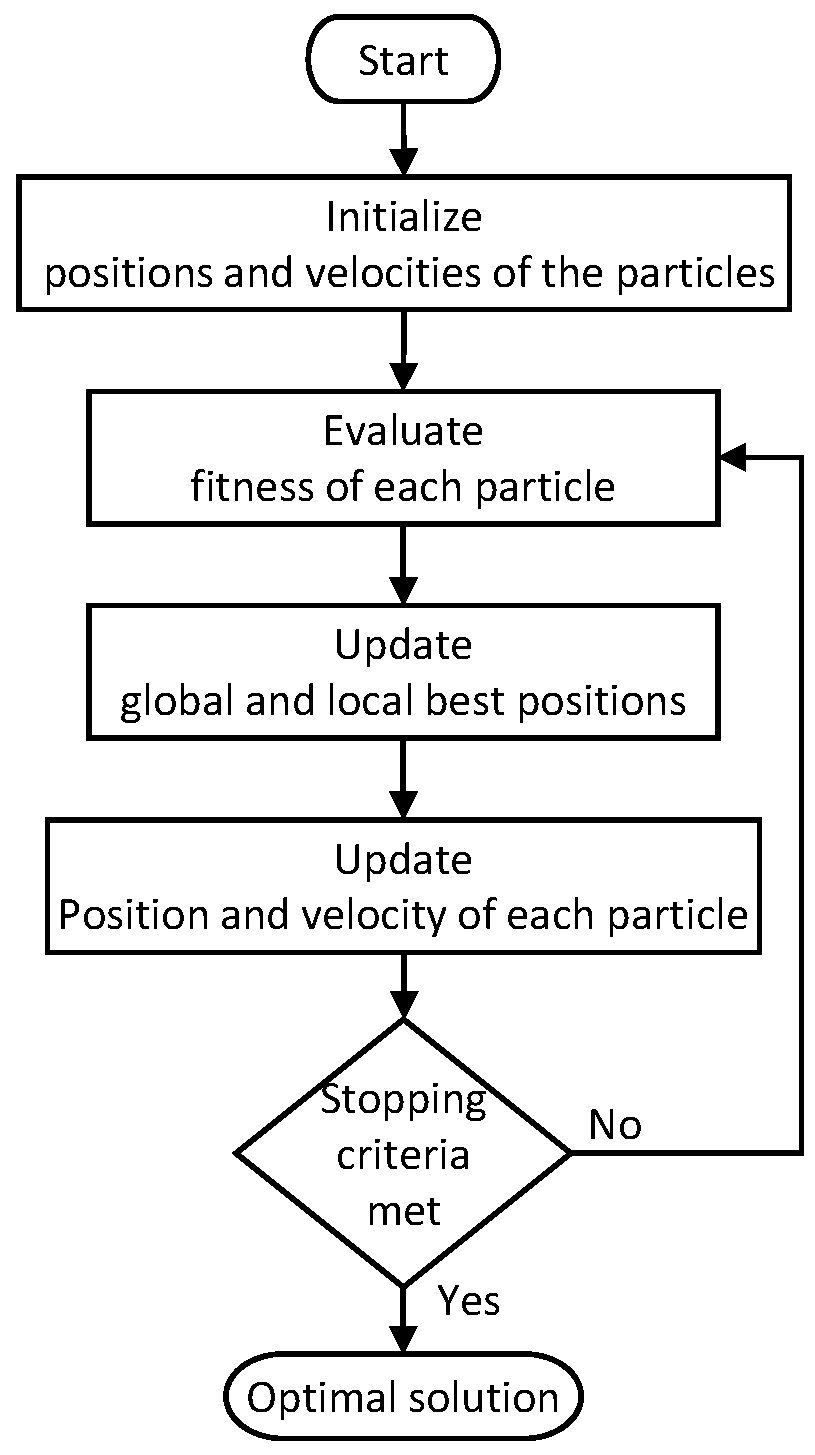
5.1. Particle Swarm Optimization (PSO)
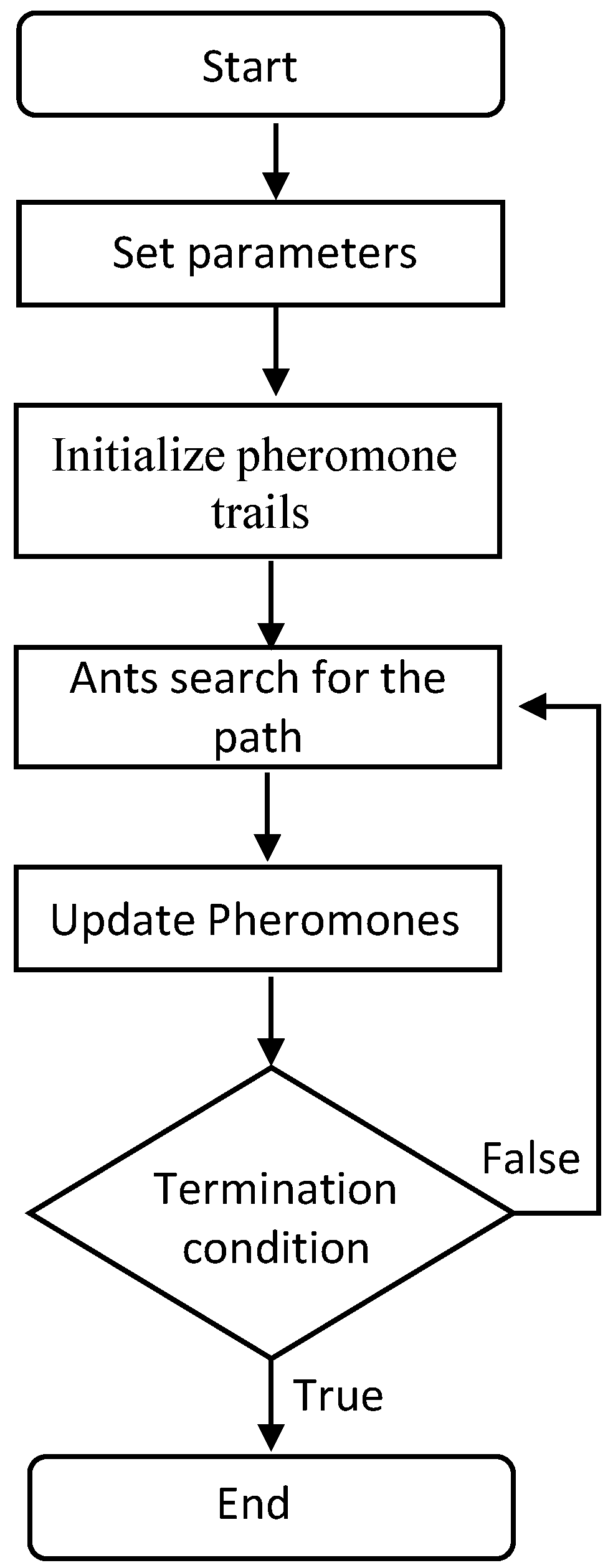
5.2. Ant Colony Optimization (ACO)
6. Results and Discussion
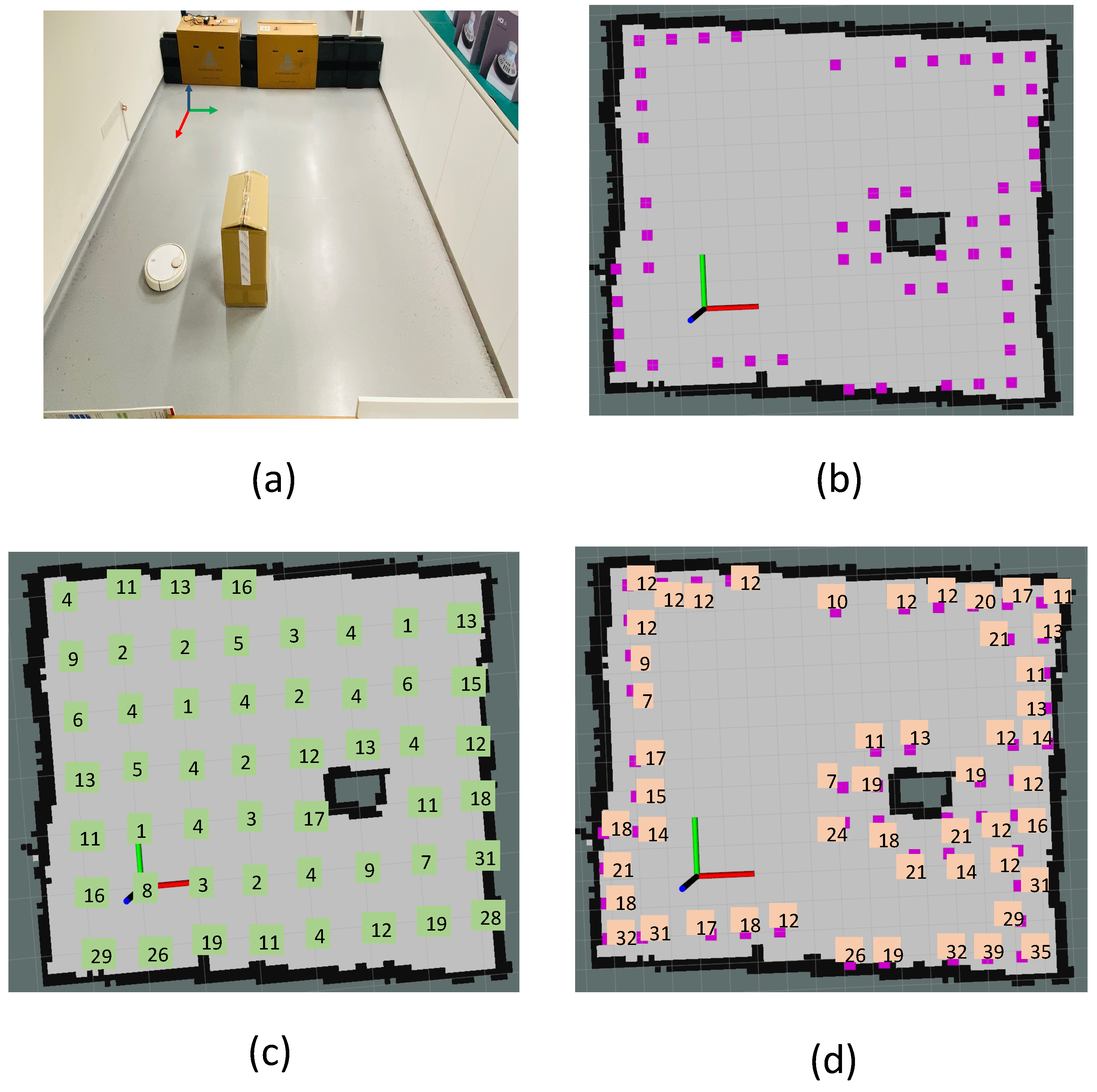
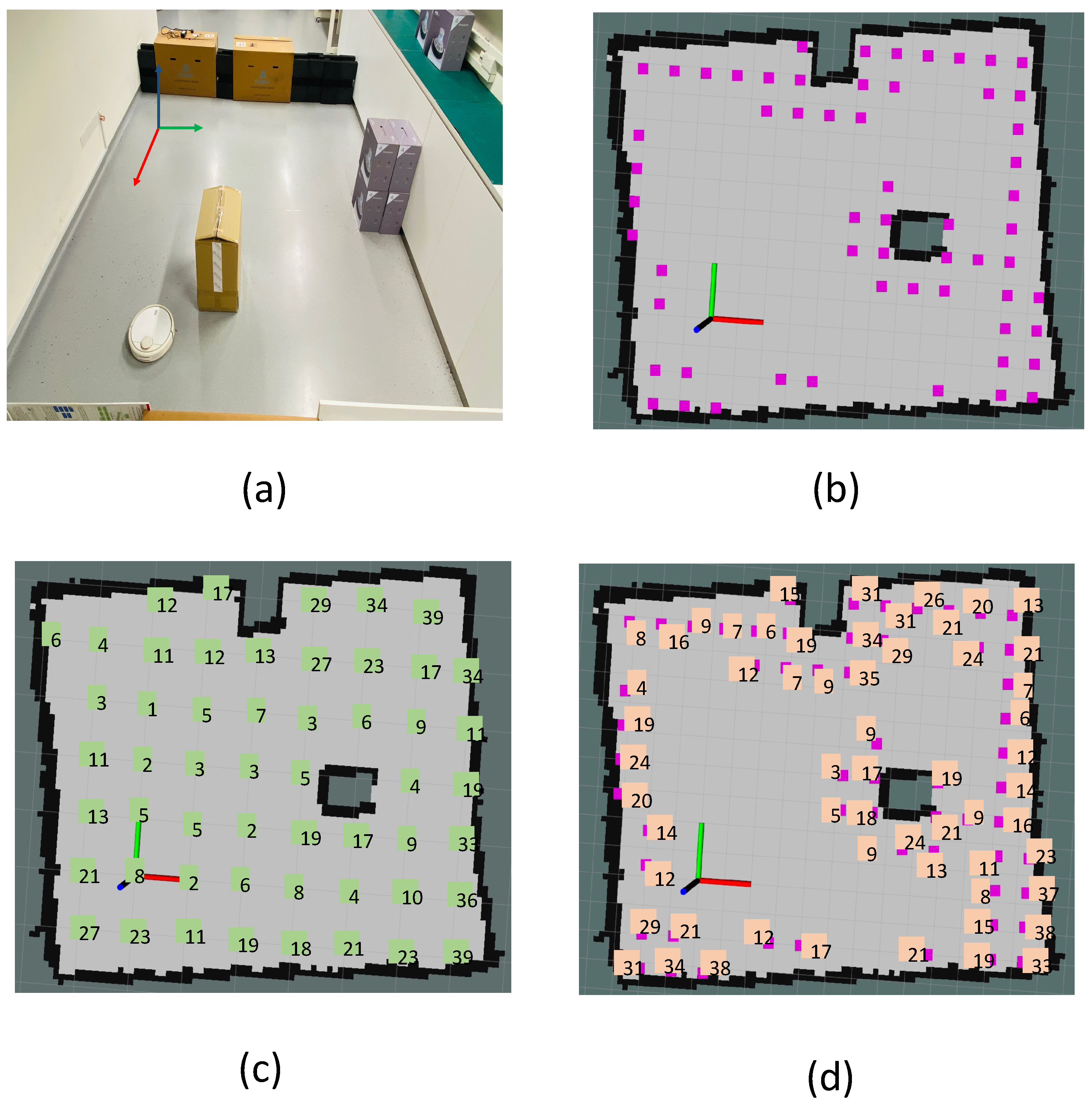
6.1. Trial-1: Sample Location Identification
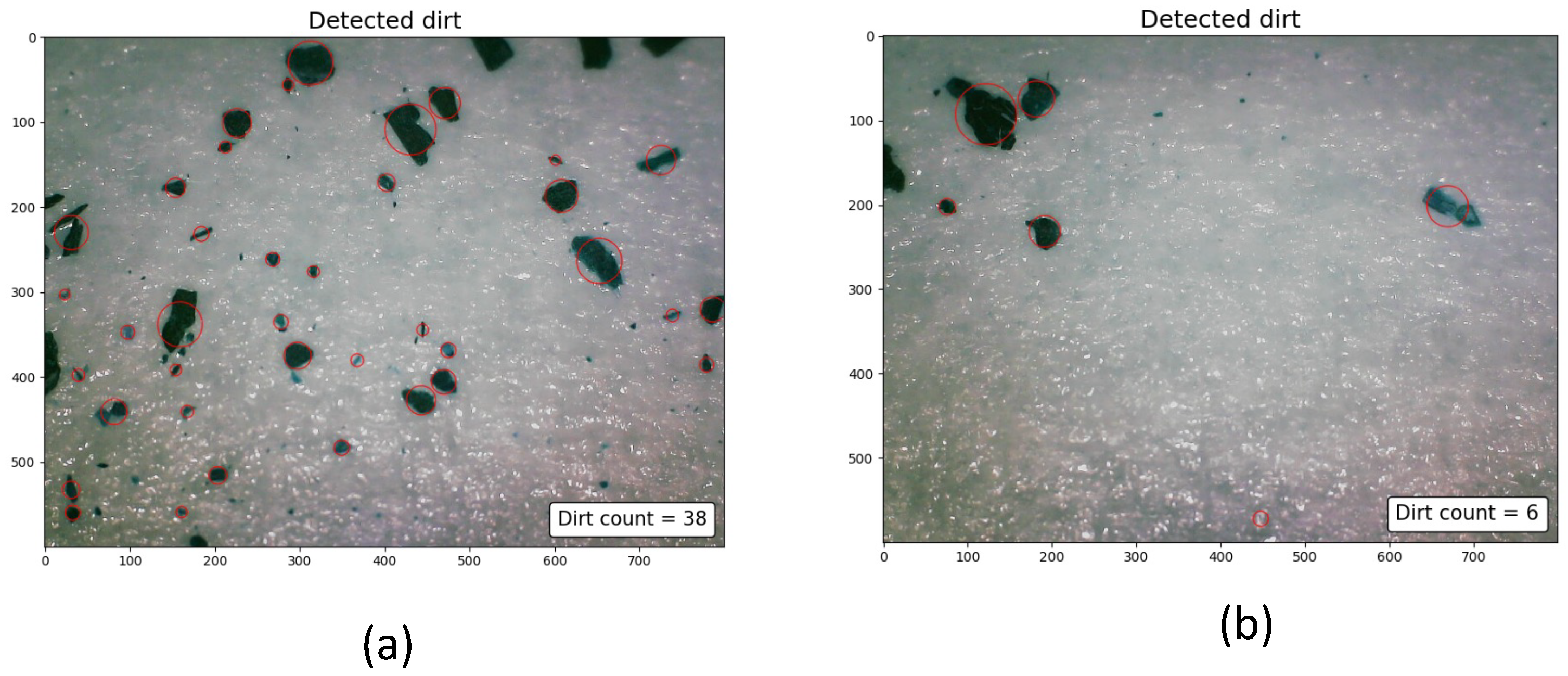
- Apply thresholds on the source image and convert the image to binary
- Using contour extraction, identify the connected pixels from the binary image and estimate blob centroid
- The blob centroid is regarded as the location of the dirt particle
- The number of centroids is regarded as the dirt count
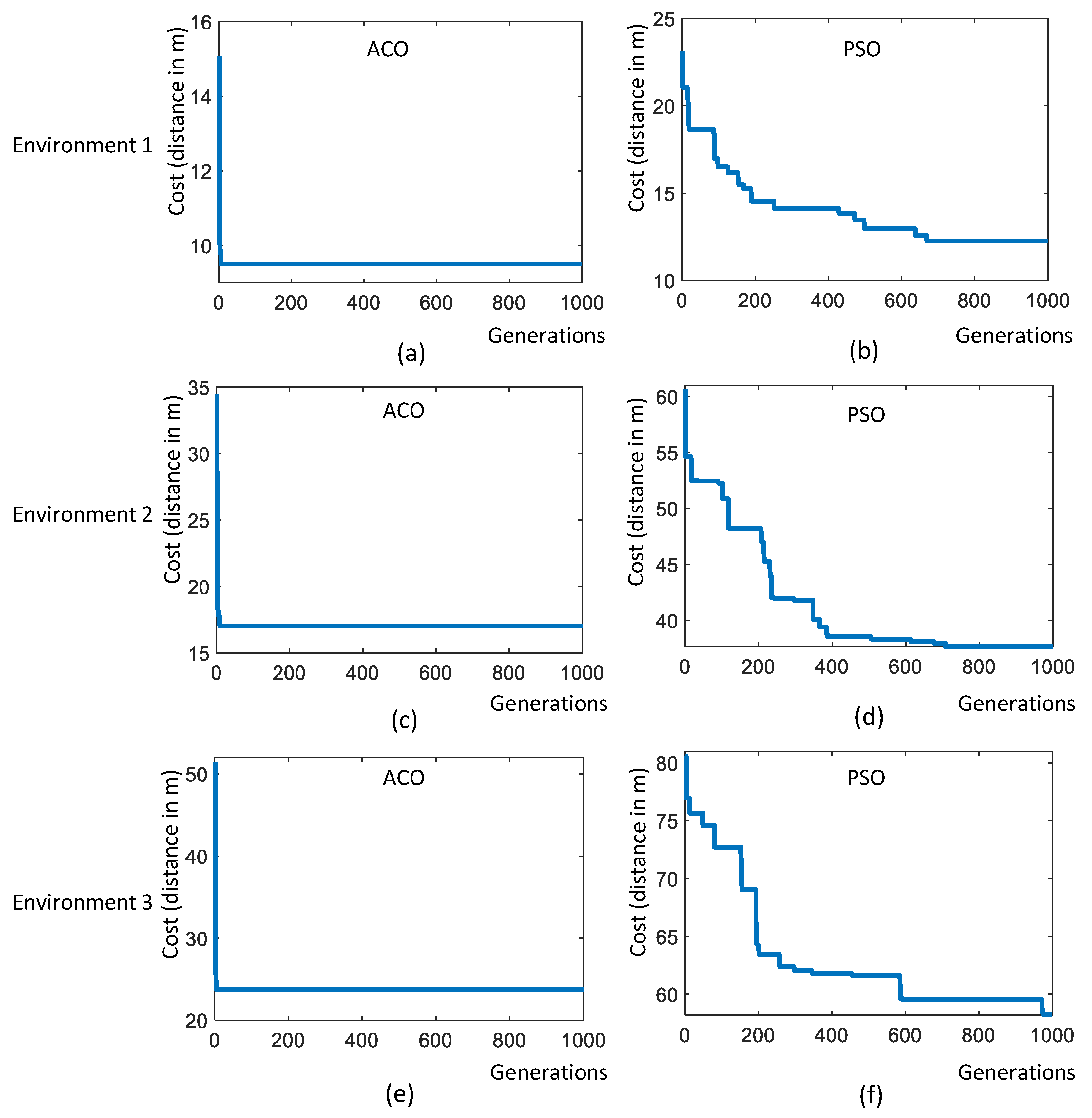
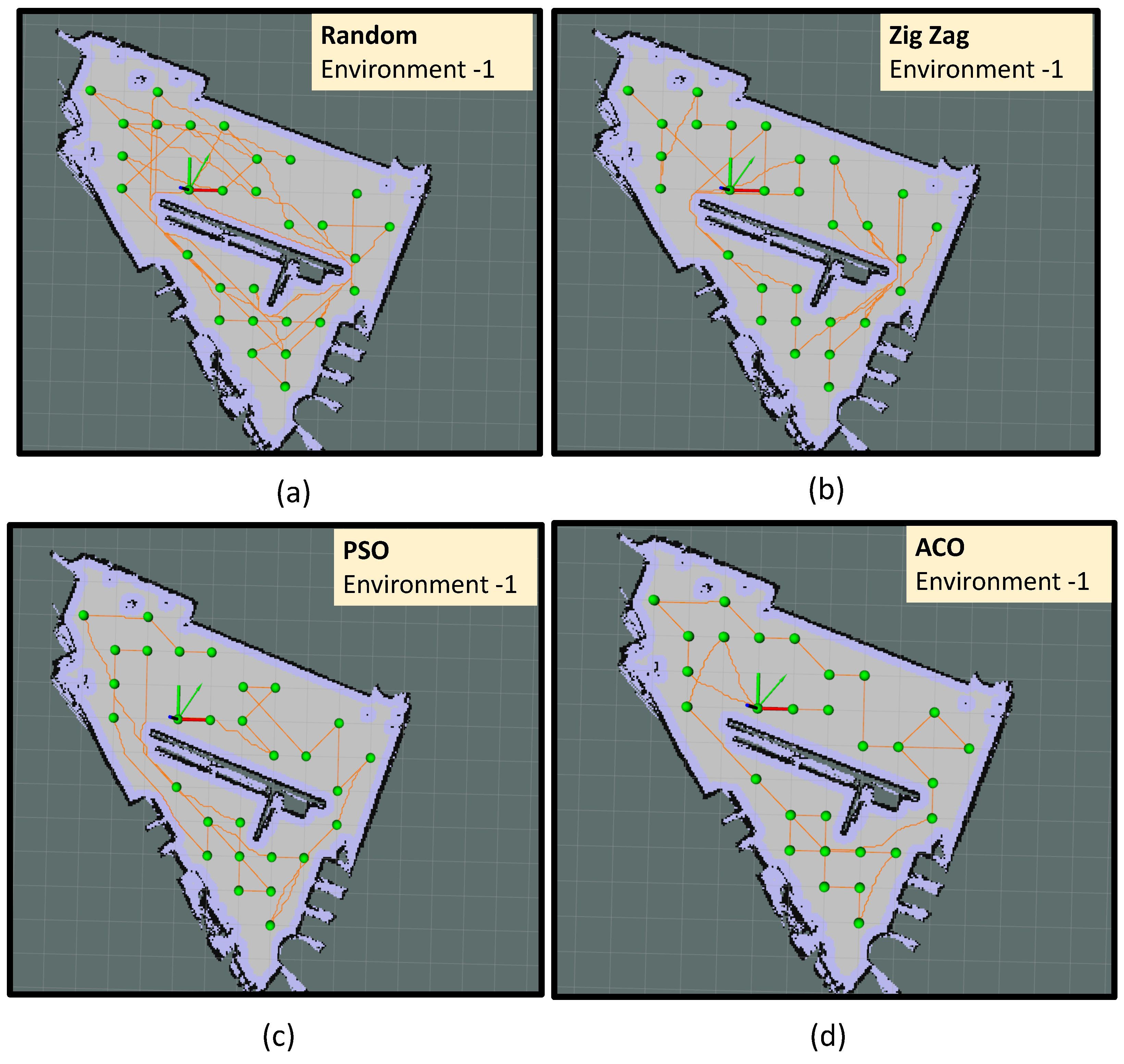
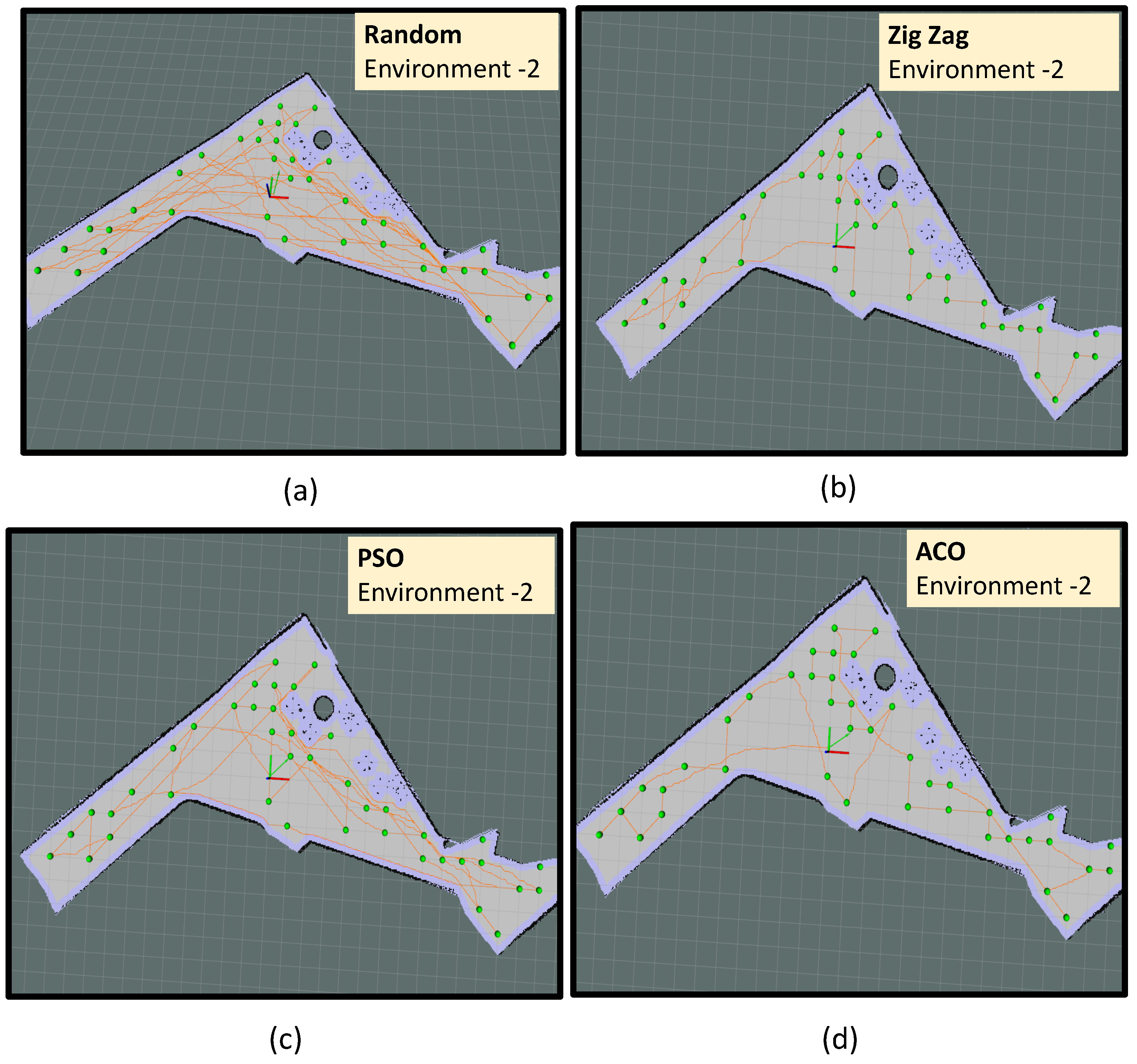
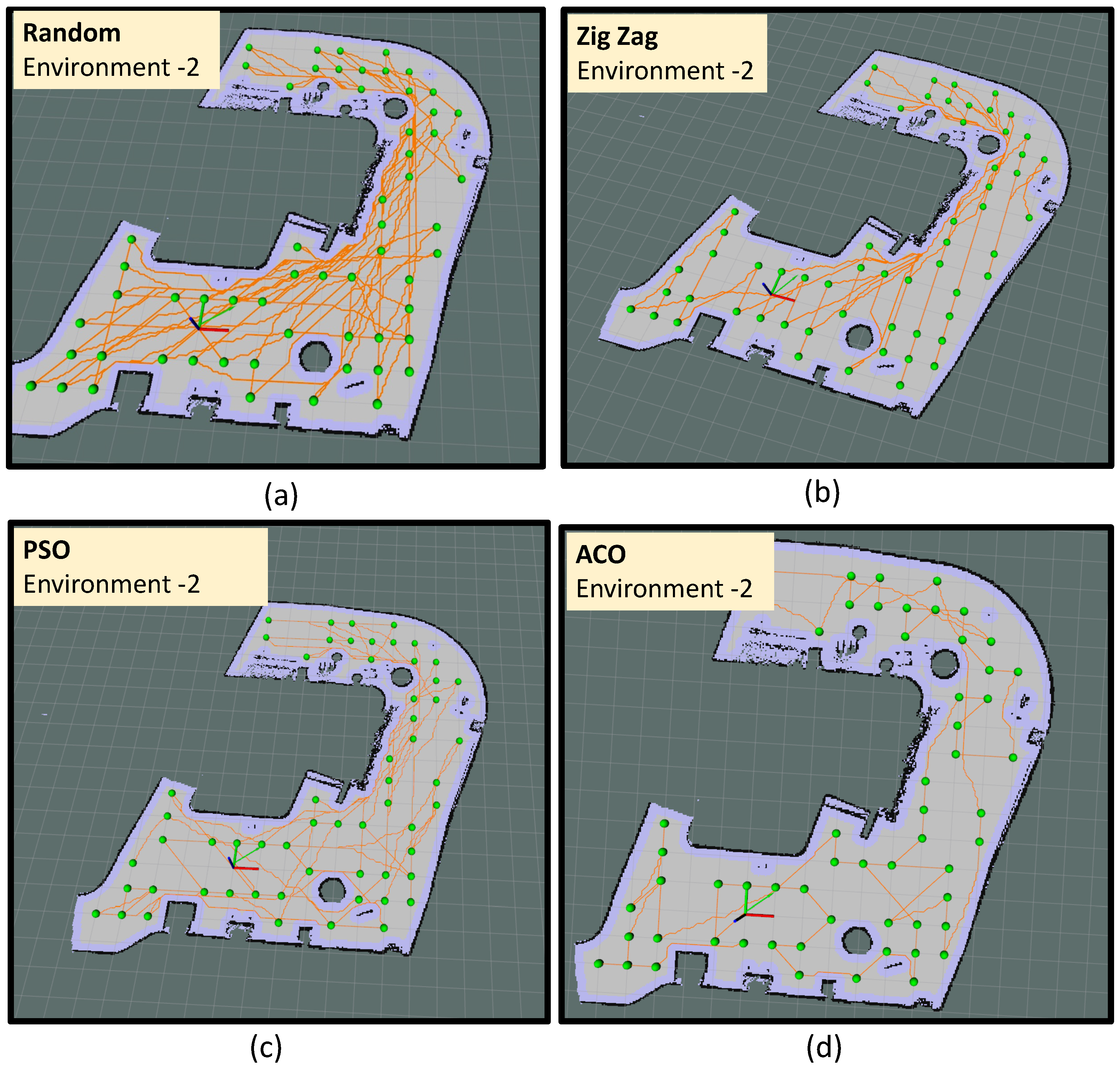
6.2. Trial-2: Path Generation
7. Conclusions and Future Works
- Study the effect of variation of dirt patterns in auditing algorithms and consider dirt pattern distribution for audit path planning
- A comprehensive dirt dataset generation for machine learning-based sample auditing
- Inclusion of more geometrical signatures that contribute to the dirt accumulation in a region
- Extending the present cleaning auditing framework by including olfactory sensing techniques
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- 27 Janitorial Services Industry Statistics and Trends. Available online: https://brandongaille.com/27-janitorial-services-industry-statistics-and-trends (accessed on 5 June 2022).
- Tay, S. How Can Singapore’s Cleaning Industry Prepare for an ‘Endemic’? Available online: https://govinsider.asia/future-of-work/how-can-singapores-cleaning-industry-prepare-for-an-endemic-nea-dalson-chung/ (accessed on 5 June 2022).
- Seo, T.; Jeon, Y.; Park, C.; Kim, J. Survey on glass and façade-cleaning robots: Climbing mechanisms, cleaning methods, and applications. Int. J. Precis. Eng. Manuf.-Green Technol. 2019, 6, 367–376. [Google Scholar] [CrossRef]
- Perminov, S.; Mikhailovskiy, N.; Sedunin, A.; Okunevich, I.; Kalinov, I.; Kurenkov, M.; Tsetserukou, D. Ultrabot: Autonomous mobile robot for indoor uv-c disinfection. In Proceedings of the 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE), Lyon, France, 23–27 August 2021; pp. 2147–2152. [Google Scholar]
- Grando, M.T.; Maletz, E.R.; Martins, D.; Simas, H.; Simoni, R. Robots for cleaning photovoltaic panels: State of the art and future prospects. Rev. Tecnol. Cienc. 2019, 35, 137–150. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.V.; Wang, L. A literature survey of the robotic technologies during the COVID-19 pandemic. J. Manuf. Syst. 2021, 60, 823–836. [Google Scholar] [CrossRef]
- Miao, X.; Lee, J.; Kang, B.Y. Scalable coverage path planning for cleaning robots using rectangular map decomposition on large environments. IEEE Access 2018, 6, 38200–38215. [Google Scholar] [CrossRef]
- Lee, T.K.; Baek, S.; Oh, S.Y. Sector-based maximal online coverage of unknown environments for cleaning robots with limited sensing. Rob. Auton. Syst. 2011, 59, 698–710. [Google Scholar] [CrossRef]
- Pathmakumar, T.; Sivanantham, V.; Anantha Padmanabha, S.G.; Elara, M.R.; Tun, T.T. Towards an Optimal Footprint Based Area Coverage Strategy for a False-Ceiling Inspection Robot. Sensors 2021, 21, 5168. [Google Scholar] [CrossRef]
- Noh, D.; Lee, W.; Kim, H.R.; Cho, I.S.; Shim, I.B.; Baek, S. Adaptive Coverage Path Planning Policy for a Cleaning Robot with Deep Reinforcement Learning. In Proceedings of the 2022 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 7–9 January 2022; pp. 1–6. [Google Scholar]
- Nemoto, T.; Mohan, R.E. Heterogeneous multirobot cleaning system: State and parameter estimation. Autom. Constr. 2020, 109, 102968. [Google Scholar] [CrossRef]
- Kaviri, S.; Tahsiri, A.; Taghirad, H.D. Coverage Control of Multi-Robot System for Dynamic Cleaning of Oil Spills. In Proceedings of the 2019 7th International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 20–21 November 2019; pp. 17–22. [Google Scholar]
- Giske, L.A.L.; Bjørlykhaug, E.; Løvdal, T.; Mork, O.J. Experimental study of effectiveness of robotic cleaning for fish-processing plants. Food Control 2019, 100, 269–277. [Google Scholar] [CrossRef]
- Lewis, T.; Griffith, C.; Gallo, M.; Weinbren, M. A modified ATP benchmark for evaluating the cleaning of some hospital environmental surfaces. J. Hosp. Infect. 2008, 69, 156–163. [Google Scholar] [CrossRef]
- Asgharian, R.; Hamedani, F.M.; Heydari, A. Step by step how to do cleaning validation. Int. J. Pharm. Life Sci. 2014, 5, 3345–3365. [Google Scholar]
- Malav, S.; Saxena, N. Assessment of disinfection and cleaning validation in central laboratory, MBS hospital, Kota. J. Evol. Med Dent. Sci. 2018, 7, 1259–1263. [Google Scholar] [CrossRef]
- Bjørlykhaug, E.; Egeland, O. Vision system for quality assessment of robotic cleaning of fish processing plants using CNN. IEEE Access 2019, 7, 71675–71685. [Google Scholar] [CrossRef]
- Cloutman-Green, E.; D’Arcy, N.; Spratt, D.A.; Hartley, J.C.; Klein, N. How clean is clean—Is a new microbiology standard required? Am. J. Infect. Control 2014, 42, 1002–1003. [Google Scholar] [CrossRef] [PubMed]
- Pathmakumar, T.; Kalimuthu, M.; Elara, M.R.; Ramalingam, B. An autonomous robot-aided auditing scheme for floor cleaning. Sensors 2021, 21, 4332. [Google Scholar] [CrossRef]
- Pathmakumar, T.; Elara, M.R.; Gómez, B.F.; Ramalingam, B. A Reinforcement Learning Based Dirt-Exploration for Cleaning-Auditing Robot. Sensors 2021, 21, 8331. [Google Scholar] [CrossRef]
- Shang, Z.; Bradley, J.; Shen, Z. A co-optimal coverage path planning method for aerial scanning of complex structures. Expert Syst. Appl. 2020, 158, 113535. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef] [Green Version]
- Bay, H.; Tuytelaars, T.; Gool, L.V. Surf: Speeded up robust features. In Proceedings of the European Conference on Computer Vision, Graz, Austria, 7–13 May 2006; Springer: Cham, Switzerland, 2006; pp. 404–417. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Sharma, S.K.; Jain, K. Image stitching using AKAZE features. J. Indian Soc. Remote Sens. 2020, 48, 1389–1401. [Google Scholar] [CrossRef]
- Hirose, K.; Saito, H. Fast Line Description for Line-based SLAM. In BMVC; Keio University: Tokyo, Japan, 2012; pp. 1–11. [Google Scholar]
- Suh, J.; Choi, E.Y.; Borrelli, F. Vision-based race track slam based only on lane curvature. IEEE Trans. Veh. Technol. 2019, 69, 1495–1504. [Google Scholar] [CrossRef]
- Yan, T.; Zhang, Y. Mobile Robots Location and Mapping Based on Corner Features. In Proceedings of the 2018 5th International Conference on Information Science and Control Engineering (ICISCE), Zhengzhou, China, 20–22 July 2018; pp. 833–838. [Google Scholar]
- Mahmood, M.R.; Abdulazeez, A.M. Different model for hand gesture recognition with a novel line feature extraction. In Proceedings of the 2019 International Conference on Advanced Science and Engineering (ICOASE), Zakho-Duhok, Iraq, 2–4 April 2019; pp. 52–57. [Google Scholar]
- Kim, J.; Oh, K.; Oh, B.S.; Lin, Z.; Toh, K.A. A line feature extraction method for finger-knuckle-print verification. Cogn. Comput. 2019, 11, 50–70. [Google Scholar] [CrossRef]
- Canny, J. A Computational Approach to Edge Detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 6, 679–698. [Google Scholar] [CrossRef]
- Fernandes, L.A.; Oliveira, M.M. Real-time line detection through an improved Hough transform voting scheme. Pattern Recognit. 2008, 41, 299–314. [Google Scholar] [CrossRef]
- Mochizuki, Y.; Torii, A.; Imiya, A. N-Point Hough transform for line detection. J. Vis. Commun. Image Represent. 2009, 20, 242–253. [Google Scholar] [CrossRef]
- Herout, A.; Dubská, M.; Havel, J. Review of Hough transform for line detection. In Real-Time Detection of Lines and Grids; Springer: Berlin/Heidelberg, Germany, 2013; pp. 3–16. [Google Scholar]
- Derpanis, K.G. The Harris Corner Detector; York University: York, UK, 2004; 2p. [Google Scholar]
- Shui, P.L.; Zhang, W.C. Corner detection and classification using anisotropic directional derivative representations. IEEE Trans. Image Process. 2013, 22, 3204–3218. [Google Scholar] [CrossRef]
- Awrangjeb, M.; Lu, G.; Fraser, C.S.; Ravanbakhsh, M. A fast corner detector based on the chord-to-point distance accumulation technique. In Proceedings of the 2009 Digital Image Computing: Techniques and Applications, Melbourne, VIC, Australia, 1–3 December 2009; pp. 519–525. [Google Scholar]
- Rosten, E.; Drummond, T. Machine learning for high-speed corner detection. In Proceedings of the European Conference on Computer Vision, Graz, Austria, 7–13 May 2006; pp. 430–443. [Google Scholar]
- Rosten, E.; Porter, R.; Drummond, T. Faster and better: A machine learning approach to corner detection. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 32, 105–119. [Google Scholar] [CrossRef] [Green Version]
- Xin, J.; Zhong, J.; Li, S.; Sheng, J.; Cui, Y. Greedy mechanism based particle swarm optimization for path planning problem of an unmanned surface vehicle. Sensors 2019, 19, 4620. [Google Scholar] [CrossRef] [Green Version]
- Huo, L.; Zhu, J.; Li, Z.; Ma, M. A hybrid differential symbiotic organisms search algorithm for UAV path planning. Sensors 2021, 21, 3037. [Google Scholar] [CrossRef]
- Samarakoon, S.B.P.; Muthugala, M.V.J.; Elara, M.R. Metaheuristic based navigation of a reconfigurable robot through narrow spaces with shape changing ability. Expert Syst. Appl. 2022, 201, 117060. [Google Scholar] [CrossRef]
- Fu, J.; Lv, T.; Li, B. Underwater Submarine Path Planning Based on Artificial Potential Field Ant Colony Algorithm and Velocity Obstacle Method. Sensors 2022, 22, 3652. [Google Scholar] [CrossRef]
- Yuan, X.; Yuan, X.; Wang, X. Path Planning for Mobile Robot Based on Improved Bat Algorithm. Sensors 2021, 21, 4389. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, J.; Yang, Z.; Tang, J. Two-dimensional optimal path planning for autonomous underwater vehicle using a whale optimization algorithm. Concurr. Comput. Pract. Exp. 2021, 33, e6140. [Google Scholar] [CrossRef]
- Zhang, Z.; He, R.; Yang, K. A bioinspired path planning approach for mobile robots based on improved sparrow search algorithm. Adv. Manuf. 2022, 10, 114–130. [Google Scholar] [CrossRef]
- Ma, Y.; Feng, W.; Mao, Z.; Li, H.; Meng, X. Path planning of UUV based on HQPSO algorithm with considering the navigation error. Ocean Eng. 2022, 244, 110048. [Google Scholar] [CrossRef]
- Wang, X.; Shi, H.; Zhang, C. Path planning for intelligent parking system based on improved ant colony optimization. IEEE Access 2020, 8, 65267–65273. [Google Scholar] [CrossRef]
- Zheng, K. Ros navigation tuning guide. In Robot Operating System (ROS); Springer: Berlin/Heidelberg, Germany, 2021; pp. 197–226. [Google Scholar]
- Chen, W.; Sui, L.; Xu, Z.; Lang, Y. Improved Zhang-Suen thinning algorithm in binary line drawing applications. In Proceedings of the 2012 International Conference on Systems and Informatics (ICSAI2012), Yantai, China, 19–20 May 2012; pp. 1947–1950. [Google Scholar]
- Muthugala, M.V.J.; Samarakoon, S.B.P.; Elara, M.R. Tradeoff between area coverage and energy usage of a self-reconfigurable floor cleaning robot based on user preference. IEEE Access 2020, 8, 76267–76275. [Google Scholar] [CrossRef]
- Muthugala, M.V.J.; Samarakoon, S.B.P.; Elara, M.R. Toward energy-efficient online Complete Coverage Path Planning of a ship hull maintenance robot based on Glasius Bio-inspired Neural Network. Expert Syst. Appl. 2022, 187, 115940. [Google Scholar] [CrossRef]
- Zhang, H.Y.; Lin, W.M.; Chen, A.X. Path planning for the mobile robot: A review. Symmetry 2018, 10, 450. [Google Scholar] [CrossRef] [Green Version]
- Muthugala, M.A.V.J.; Samarakoon, S.M.B.P.; Mohan, R.E. Design by Robot: A Human-Robot Collaborative Framework for Improving Productivity of a Floor Cleaning Robot. In Proceedings of the 2022 IEEE International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022. [Google Scholar]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Poli, R.; Kennedy, J.; Blackwell, T. Particle swarm optimization. Swarm Intell. 2007, 1, 33–57. [Google Scholar] [CrossRef]
- Bradski, G.; Kaehler, A. Learning OpenCV: Computer Vision with the OpenCV Library; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2008. [Google Scholar]
- Raihan, F.; Ce, W. PCB defect detection USING OPENCV with image subtraction method. In Proceedings of the 2017 International Conference on Information Management and Technology (ICIMTech), Special Region of Yogyakarta, Indonesia, 15–17 November 2017; pp. 204–209. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trial-1a | ||
|---|---|---|
| Uniform Sampling | Proposed Approach | |
| Number of dirt samples | 22 | 47 |
| Number of clean samples | 29 | 4 |
| Total sampling | 51 | 51 |
| Dirt gathering efficiency | 0.43 | 0.92 |
| Trial-1b | ||
|---|---|---|
| Uniform Sampling | Proposed Approach | |
| Number of dirt samples | 29 | 44 |
| Number of clean samples | 24 | 15 |
| Total sampling | 53 | 59 |
| Dirt gathering efficiency | 0.54 | 0.74 |
| Algorithm | Parameter | Validation Trials | ||
|---|---|---|---|---|
| Environment-1 N = 29 | Environment-2 N = 39 | Environment-3 N = 59 | ||
| PSO | Path length (D) | 12.27 m | 37.66 m | 58.21 m |
| Time taken (T) | 470 s | 889 s | 1320 s | |
| Total energy (E) | 23.72 kJ | 44.82 kJ | 66.84 KJ | |
| ACO | Path length (D) | 9.5 m | 17.04 m | 23.8 m |
| Time taken (T) | 427 s | 642 s | 951 s | |
| Total energy (E) | 22.55 kJ | 32.35 kJ | 47.89 KJ | |
| Zig-Zag | Path length (D) | 16.33 m | 17.85 m | 53.42 m |
| Time taken (T) | 511 s | 665 s | 1248 s | |
| Total energy (E) | 27.98 kJ | 35.13 kJ | 65.88 KJ | |
| Random | Path length (D) | 25.15 m | 73.31 m | 106.75 m |
| Time taken (T) | 602 s | 1220 s | 1785 s | |
| Total energy (E) | 31.78 kJ | 64.44 kJ | 94.39 KJ | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pathmakumar, T.; Muthugala, M.A.V.J.; Samarakoon, S.M.B.P.; Gómez, B.F.; Elara, M.R. A Novel Path Planning Strategy for a Cleaning Audit Robot Using Geometrical Features and Swarm Algorithms. Sensors 2022, 22, 5317. https://doi.org/10.3390/s22145317
Pathmakumar T, Muthugala MAVJ, Samarakoon SMBP, Gómez BF, Elara MR. A Novel Path Planning Strategy for a Cleaning Audit Robot Using Geometrical Features and Swarm Algorithms. Sensors. 2022; 22(14):5317. https://doi.org/10.3390/s22145317
Chicago/Turabian StylePathmakumar, Thejus, M. A. Viraj J. Muthugala, S. M. Bhagya P. Samarakoon, Braulio Félix Gómez, and Mohan Rajesh Elara. 2022. "A Novel Path Planning Strategy for a Cleaning Audit Robot Using Geometrical Features and Swarm Algorithms" Sensors 22, no. 14: 5317. https://doi.org/10.3390/s22145317
APA StylePathmakumar, T., Muthugala, M. A. V. J., Samarakoon, S. M. B. P., Gómez, B. F., & Elara, M. R. (2022). A Novel Path Planning Strategy for a Cleaning Audit Robot Using Geometrical Features and Swarm Algorithms. Sensors, 22(14), 5317. https://doi.org/10.3390/s22145317