
Design, Modeling and Implementation of Digital Twins



Abstract
:1. Introduction
- Collection Strategy—We used a keyword search to make the first selection of potentially relevant scientific publications published in the last five years. We considered databases such as Google Scholar, IEEE Xplore, DBLP and Science Direct to collect the publications. Articles were filtered out with the keyword digital twins. Duplicate articles were deleted and the most relevant works were filtered according to their titles and abstracts. We included other publications using references from the first dataset. This second dataset may contain publications older than five years if the content was deemed relevant for the survey;
- Dataset Filtering—The inclusion criteria for our study was based on the following conditions: (1) the DT should be approached from a computer system viewpoint; and (2) the proposal should be useful for the simulation and optimization of the real system. The exclusion criteria was based on the following conditions: (1) no scientific articles written in a language other than English or with full content access denied; and (2) the fundamental concepts, their related properties or the DT implementation were not adequately described;
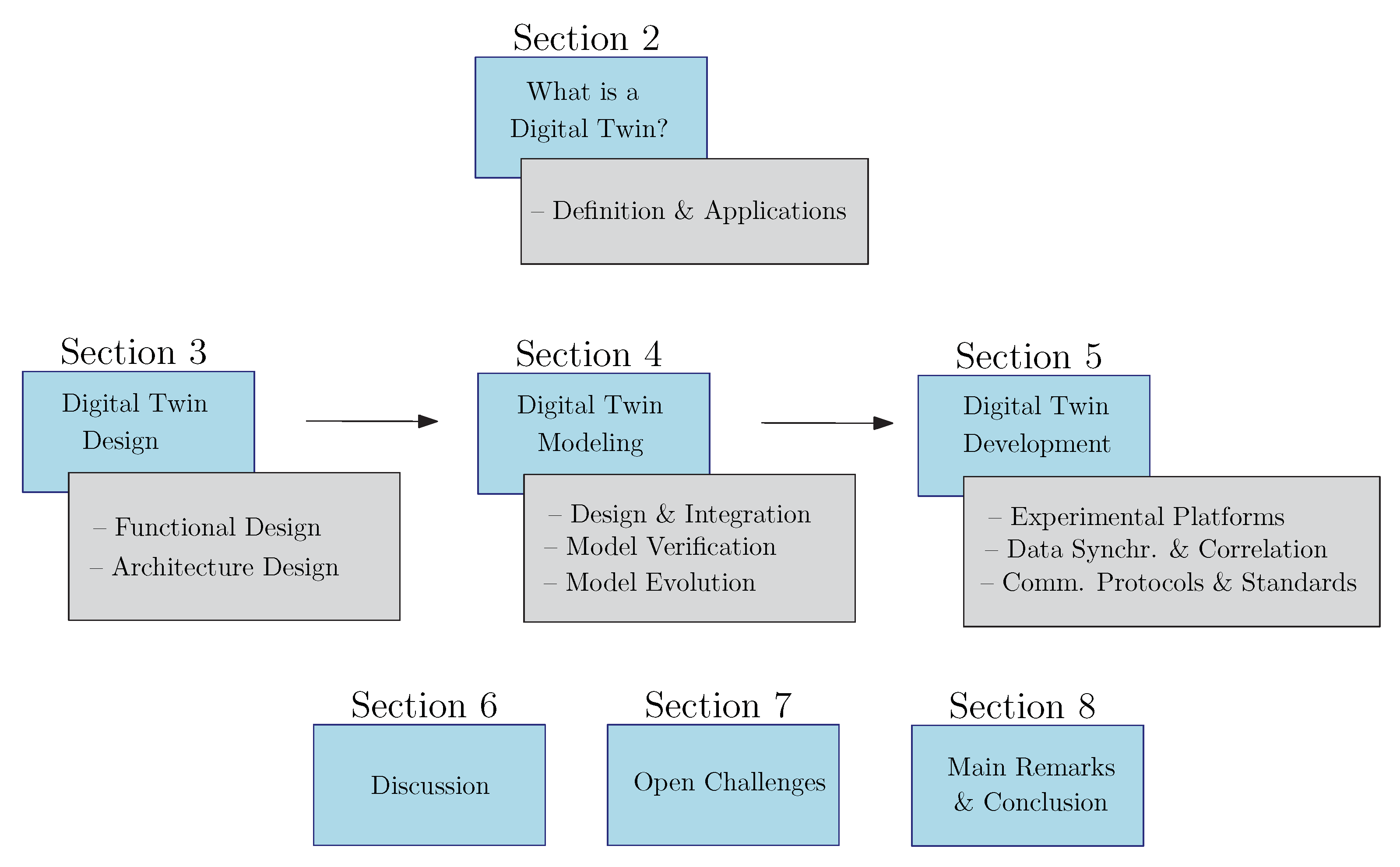
- Literature Classification—We aimed at clarifying how to build DTs, i.e., which process to follow to design the different parts of the platform and which existing tools can be used. Hence, the selected literature was analyzed and classified based on our proposed design procedure to design, model and develop a DT. We organize the paper using the taxonomy shown in Figure 1. We propose a three-step procedure that corresponds to the chronological order of the activities required to implement a DT. The first step explains how to design a DT, i.e., how to define the functional requirements and the system architecture. The second step explains how to model a DT. This step requires creating system models that represent different aspects of the PO and integrating them. Finally, the third step explains how to implement a DT, i.e., which are the existing platforms, frameworks and tools for developing a DT, how to synchronize the data between physical and virtual objects and the existing communication protocols and standards for the information exchange.
2. What Is a Digital Twin?
2.1. Digital Models vs. Digital Shadows vs. Digital Twins (DT)
2.2. Digital Twins vs. Simulations
3. Digital Twin Design
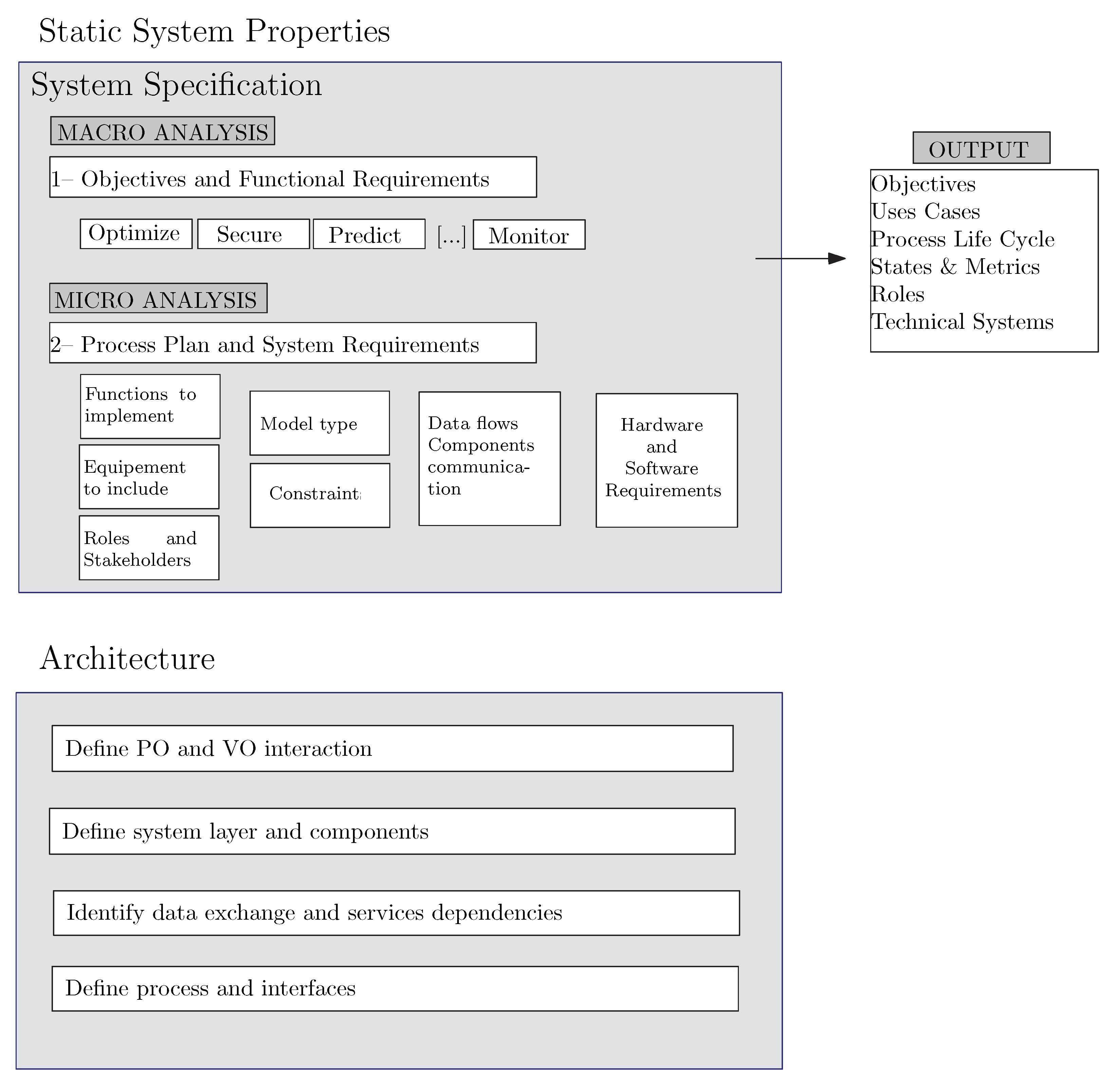
3.1. System Specification
3.1.1. Functional Requirements
3.1.2. Process Planning
3.2. Architectural Design
4. Digital Twin Modeling
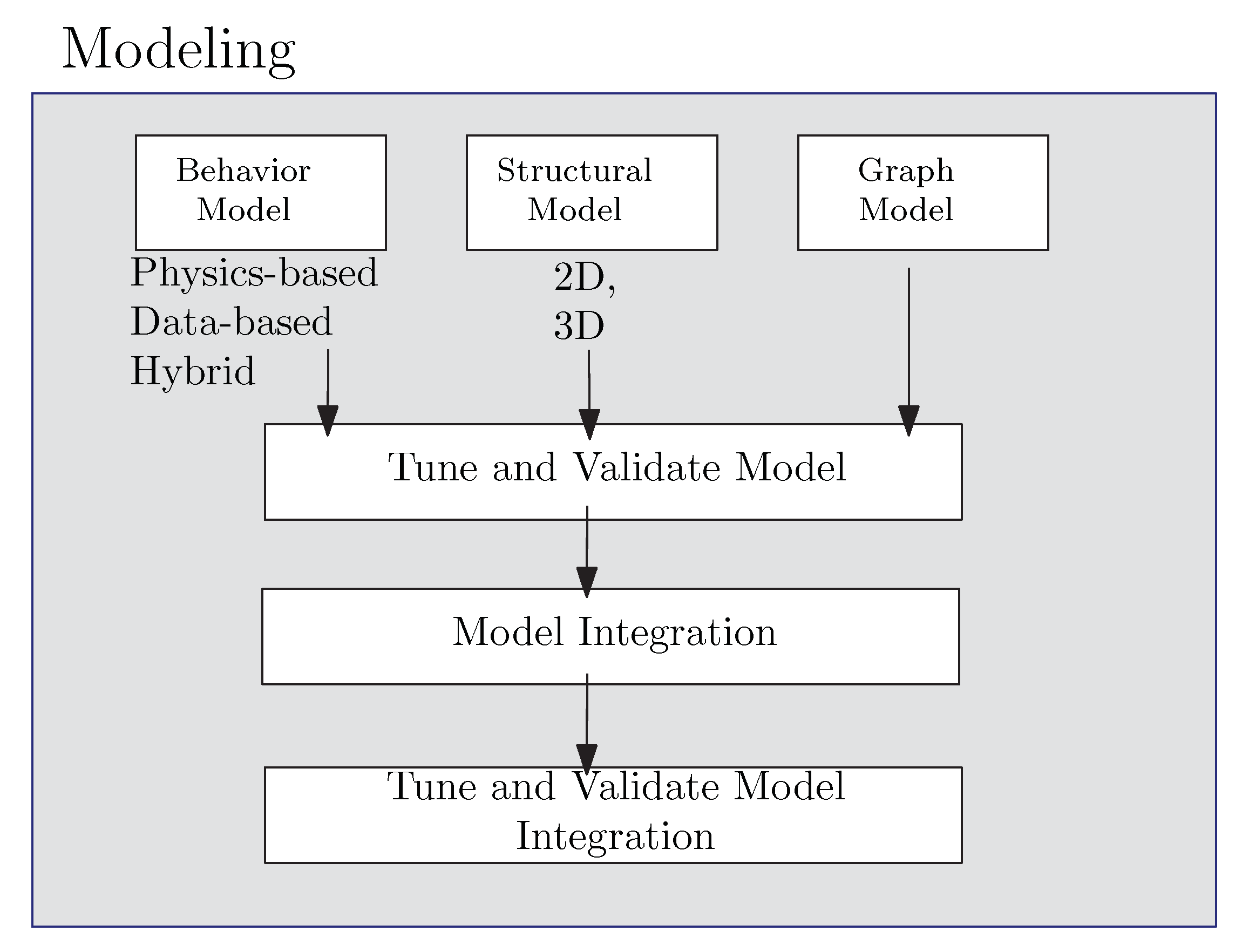
4.1. How to Model a Component
4.1.1. Behavioral Models
4.1.2. Structural Model
4.2. How to Integrate the Component Models
- 1.
- How different components interact with each other to create more complex systems. This means that models interact with each other to represent the PO behavior. It should be considered that decisions made by some models can modify or invalidate the conclusions of other independent models. As a result, wrong or conflicting results may exist if models do not share information and make coordinated decisions;
- 2.
- How the DT interacts with the physical world, i.e., a DT makes decisions that directly or indirectly impact the physical process. It may be difficult to delimit the physical impact a priori. For that, the digital components should propagate the decisions using the physics laws of the PO to evaluate the effects of these decisions and the inconsistencies that may arise.
5. Digital Twin Development
5.1. Communication Protocols and Data Synchronization
5.2. Experimental Platforms and Tools
6. Discussion
7. Open Challenges
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wu, Y.; Zhang, K.; Zhang, Y. Digital Twin Networks: A Survey. IEEE Internet Things J. 2021, 8, 13789–13804. [Google Scholar] [CrossRef]
- Gartner Top 10 Strategic Technology Trends for 2019. Available online: https://www.gartner.com/en/newsroom/press-releases/2018-10-15-gartner-identifies-the-top-10-strategic-technology-trends-for-2019 (accessed on 21 February 2022).
- Tsaramirsis, G.; Kantaros, A.; Aldarraji, I.; Piromalis, D.; Apostolopoulos, C.; Pavlopoulou, A.; Alrammal, M.; Ismail, Z.; Buhari, S.; Stojmenovic, M.; et al. A Modern Approach towards an Industry 4.0 Model: From Driving Technologies to Management. J. Sensors 2022, 2022, 5023011. [Google Scholar] [CrossRef]
- Fuller, A.; Fan, Z.; Day, C.; Barlow, C. Digital Twin: Enabling Technologies, Challenges and Open Research. IEEE Access 2020, 8, 108952–108971. [Google Scholar] [CrossRef]
- Snyder, H. Literature review as a research methodology: An overview and guidelines. J. Bus. Res. 2019, 104, 333–339. [Google Scholar] [CrossRef]
- Wagg, D.; Worden, K.; Barthorpe, R.; Gardner, P. Digital Twins: State-of-The-Art Future Directions for Modelling and Simulation in Engineering Dynamics Applications. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part B Mech. Eng. 2020, 6. [Google Scholar] [CrossRef]
- Barricelli, B.R.; Casiraghi, E.; Fogli, D. A Survey on Digital Twin: Definitions, Characteristics, Applications, and Design Implications. IEEE Access 2019, 7, 167653–167671. [Google Scholar] [CrossRef]
- Grieves, M. Digital Twin: Manufacturing Excellence through Virtual Factory Replication; White Paper; Florida Institute of Technology: Melbourne, FL, USA, 2014; pp. 1–7. [Google Scholar]
- Liu, Z.; Meyendorf, N.; Mrad, N. The role of data fusion in predictive maintenance using digital twin. AIP Conf. Proc. 2018, 1949, 020023. [Google Scholar] [CrossRef]
- Mathupriya, S.; Saira Banu, S.; Sridhar, S.; Arthi, B. Digital twin technology on IoT, industries & other smart environments: A survey. Mater. Today Proc. 2020, in press. [Google Scholar] [CrossRef]
- Semeraro, C.; Lezoche, M.; Panetto, H.; Dassisti, M. Digital twin paradigm: A systematic literature review. Comput. Ind. 2021, 130, 103469. [Google Scholar] [CrossRef]
- Piromalis, D.; Kantaros, A. Digital Twins in the Automotive Industry: The Road toward Physical-Digital Convergence. Appl. Syst. Innov. 2022, 5, 65. [Google Scholar] [CrossRef]
- Leng, J.; Wang, D.; Shen, W.; Li, X.; Liu, Q.; Chen, X. Digital twins-based smart manufacturing system design in Industry 4.0: A review. J. Manuf. Syst. 2021, 60, 119–137. [Google Scholar] [CrossRef]
- Tao, F.; Zhang, H.; Liu, A.; Nee, A.Y.C. Digital Twin in Industry: State-of-the-Art. IEEE Trans. Ind. Inform. 2019, 15, 2405–2415. [Google Scholar] [CrossRef]
- Glaessgen, E.; Stargel, D. The Digital Twin Paradigm for Future NASA and U.S. Air Force Vehicles. In Proceedings of the 53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference <BR> 20th AIAA/ASME/AHS Adaptive Structures Conference, Honolulu, Hawaii, 23–26 April 2012. [Google Scholar] [CrossRef] [Green Version]
- Minerva, R.; Lee, G.M.; Crespi, N. Digital Twin in the IoT Context: A Survey on Technical Features, Scenarios, and Architectural Models. Proc. IEEE 2020, 108, 1785–1824. [Google Scholar] [CrossRef]
- Al Faruque, M.A.; Muthirayan, D.; Yu, S.Y.; Khargonekar, P.P. Cognitive Digital Twin for Manufacturing Systems. In Proceedings of the 2021 Design, Automation Test in Europe Conference Exhibition (DATE), Grenoble, France, 1–5 February 2021; pp. 440–445. [Google Scholar] [CrossRef]
- Eirinakis, P.; Kalaboukas, K.; Lounis, S.; Mourtos, I.; Rožanec, J.M.; Stojanovic, N.; Zois, G. Enhancing Cognition for Digital Twins. In Proceedings of the 2020 IEEE International Conference on Engineering, Technology and Innovation (ICE/ITMC), Cardiff, UK, 15–17 June 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Mortlock, T.; Muthirayan, D.; Yu, S.Y.; Khargonekar, P.; Al Faruque, M.A. Graph Learning for Cognitive Digital Twins in Manufacturing Systems. IEEE Trans. Emerg. Top. Comput. 2021, 10, 34–45. [Google Scholar] [CrossRef]
- VanDerHorn, E.; Mahadevan, S. Digital Twin: Generalization, characterization and implementation. Decis. Support Syst. 2021, 145, 113524. [Google Scholar] [CrossRef]
- Moyne, J.; Qamsane, Y.; Balta, E.C.; Kovalenko, I.; Faris, J.; Barton, K.; Tilbury, D.M. A Requirements Driven Digital Twin Framework: Specification and Opportunities. IEEE Access 2020, 8, 107781–107801. [Google Scholar] [CrossRef]
- Stan, M.; Borangiu, T.; Răileanu, S. Data- and model-driven digital twins for design and logistics control of product distribution. In Proceedings of the 2021 23rd International Conference on Control Systems and Computer Science (CSCS), Bucharest, Romania, 26–28 May 2021; pp. 33–40. [Google Scholar] [CrossRef]
- Wang, H.; Wu, Y.; Min, G.; Miao, W. A Graph Neural Network-Based Digital Twin for Network Slicing Management. IEEE Trans. Ind. Inform. 2022, 18, 1367–1376. [Google Scholar] [CrossRef]
- Bhatti, G.; Mohan, H.; Raja Singh, R. Towards the future of smart electric vehicles: Digital twin technology. Renew. Sustain. Energy Rev. 2021, 141, 110801. [Google Scholar] [CrossRef]
- An, D.; Chen, Y. Digital Twin Enabled Methane Emission Abatement Using Networked Mobile Sensing and Mobile Actuation. In Proceedings of the 2021 IEEE 1st International Conference on Digital Twins and Parallel Intelligence (DTPI), Beijing, China, 15 July 2021–15 August 2021; pp. 354–357. [Google Scholar] [CrossRef]
- Bottani, E.; Vignali, G.; Carlo Tancredi, G.P. A digital twin model of a pasteurization system for food beverages: Tools and architecture. In Proceedings of the 2020 IEEE International Conference on Engineering, Technology and Innovation (ICE/ITMC), Cardiff, UK, 15–17 June 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Guo, D.; Zhong, R.Y.; Lin, P.; Lyu, Z.; Rong, Y.; Huang, G.Q. Digital twin-enabled Graduation Intelligent Manufacturing System for fixed-position assembly islands. Robot. Comput.-Integr. Manuf. 2020, 63, 101917. [Google Scholar] [CrossRef]
- González, M.; Salgado, O.; Croes, J.; Pluymers, B.; Desmet, W. A Digital Twin for Operational Evaluation of Vertical Transportation Systems. IEEE Access 2020, 8, 114389–114400. [Google Scholar] [CrossRef]
- Cainelli, G.; Rauchhaupt, L. Introducing resilience in industrial 5G systems using a digital twin approach. In Proceedings of the 2021 17th IEEE International Conference on Factory Communication Systems (WFCS), Linz, Austria, 9–11 June 2021; pp. 33–36. [Google Scholar] [CrossRef]
- Huang, H.; Yang, L.; Wang, Y.; Xu, X.; Lu, Y. Digital Twin-driven online anomaly detection for an automation system based on edge intelligence. J. Manuf. Syst. 2021, 59, 138–150. [Google Scholar] [CrossRef]
- Saad, A.; Faddel, S.; Youssef, T.; Mohammed, O.A. On the Implementation of IoT-Based Digital Twin for Networked Microgrids Resiliency Against Cyber Attacks. IEEE Trans. Smart Grid 2020, 11, 5138–5150. [Google Scholar] [CrossRef]
- Salvi, A.; Spagnoletti, P.; Noori, N.S. Cyber-resilience of Critical Cyber Infrastructures: Integrating digital twins in the electric power ecosystem. Comput. Secur. 2022, 112, 102507. [Google Scholar] [CrossRef]
- Schellenberger, C.; Zhang, P. Detection of covert attacks on cyber-physical systems by extending the system dynamics with an auxiliary system. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, VIC, Australia, 12–15 December 2017; pp. 1374–1379. [Google Scholar] [CrossRef]
- Sousa, B.; Arieiro, M.; Pereira, V.; Correia, J.; Lourenço, N.; Cruz, T. ELEGANT: Security of Critical Infrastructures With Digital Twins. IEEE Access 2021, 9, 107574–107588. [Google Scholar] [CrossRef]
- Xu, Z.; Easwaran, A. A Game-Theoretic Approach to Secure Estimation and Control for Cyber-Physical Systems with a Digital Twin. In Proceedings of the 2020 ACM/IEEE 11th International Conference on Cyber-Physical Systems (ICCPS), Sydney, NSW, Australia, 21–25 April 2020; pp. 20–29. [Google Scholar] [CrossRef]
- Xu, Q.; Ali, S.; Yue, T. Digital Twin-based Anomaly Detection in Cyber-physical Systems. In Proceedings of the 2021 14th IEEE Conference on Software Testing, Verification and Validation (ICST), Porto de Galinhas, Brazil, 12–16 April 2021; pp. 205–216. [Google Scholar] [CrossRef]
- Angjeliu, G.; Coronelli, D.; Cardani, G. Development of the simulation model for Digital Twin applications in historical masonry buildings: The integration between numerical and experimental reality. Comput. Struct. 2020, 238, 106282. [Google Scholar] [CrossRef]
- Barbie, A.; Pech, N.; Hasselbring, W.; Flogel, S.; Wenzhofer, F.; Walter, M.; Shchekinova, E.; Busse, M.; Turk, M.; Hofbauer, M.; et al. Developing an Underwater Network of Ocean Observation Systems with Digital Twin Prototypes—A Field Report from the Baltic Sea. IEEE Internet Comput. 2021, 26, 33–42. [Google Scholar] [CrossRef]
- Bartos, M.; Kerkez, B. Pipedream: An interactive digital twin model for natural and urban drainage systems. Environ. Model. Softw. 2021, 144, 105120. [Google Scholar] [CrossRef]
- Booyse, W.; Wilke, D.N.; Heyns, S. Deep digital twins for detection, diagnostics and prognostics. Mech. Syst. Signal Process. 2020, 140, 106612. [Google Scholar] [CrossRef]
- Bhatti, G.; Singh, R.R. Intelligent Fault Diagnosis Mechanism for Industrial Robot Actuators using Digital Twin Technology. In Proceedings of the 2021 IEEE International Power and Renewable Energy Conference (IPRECON), Kollam, India, 24–26 September 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Modoni, G.E.; Stampone, B.; Trotta, G. Application of the Digital Twin for in process monitoring of the micro injection moulding process quality. Comput. Ind. 2022, 135, 103568. [Google Scholar] [CrossRef]
- Moghadam, F.K.; Nejad, A.R. Online condition monitoring of floating wind turbines drive train by means of digital twin. Mech. Syst. Signal Process. 2022, 162, 108087. [Google Scholar] [CrossRef]
- Dong, Y.; Tan, R.; Zhang, P.; Peng, Q.; Shao, P. Product redesign using functional backtrack with digital twin. Adv. Eng. Inform. 2021, 49, 101361. [Google Scholar] [CrossRef]
- Fedorko, G.; Molnár, V.; Vasiľ, M.; Salai, R. Proposal of digital twin for testing and measuring of transport belts for pipe conveyors within the concept Industry 4.0. Measurement 2021, 174, 108978. [Google Scholar] [CrossRef]
- Li, L.; Qu, T.; Liu, Y.; Zhong, R.Y.; Xu, G.; Sun, H.; Gao, Y.; Lei, B.; Mao, C.; Pan, Y.; et al. Sustainability Assessment of Intelligent Manufacturing Supported by Digital Twin. IEEE Access 2020, 8, 174988–175008. [Google Scholar] [CrossRef]
- Liu, J.; Cao, X.; Zhou, H.; Li, L.; Liu, X.; Zhao, P.; Dong, J. A digital twin-driven approach towards traceability and dynamic control for processing quality. Adv. Eng. Informatics 2021, 50, 101395. [Google Scholar] [CrossRef]
- Sun, X.; Bao, J.; Li, J.; Zhang, Y.; Liu, S.; Zhou, B. A digital twin-driven approach for the assembly-commissioning of high precision products. Robot. Comput.-Integr. Manuf. 2020, 61, 101839. [Google Scholar] [CrossRef]
- Cortés, D.; Ramírez, J.; Villagómez, L.; Batres, R.; Vasquez-Lopez, V.; Molina, A. Digital Pyramid: An approach to relate industrial automation and digital twin concepts. In Proceedings of the 2020 IEEE International Conference on Engineering, Technology and Innovation (ICE/ITMC), Cardiff, UK, 15–17 June 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Bégout, P.; Duval, T.; Kubicki, S.; Charbonnier, B.; Bricard, E. WAAT: A Workstation AR Authoring Tool for Industry 4.0. In International Conference on Augmented Reality, Virtual Reality and Computer Graphics; De Paolis, L.T., Bourdot, P., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 304–320. [Google Scholar]
- Eckhart, M.; Ekelhart, A. Digital Twins for Cyber-Physical Systems Security: State of the Art and Outlook. In Security and Quality in Cyber-Physical Systems Engineering: With Forewords by Robert M. Lee and Tom Gilb; Springer International Publishing: Cham, Switzerland, 2019; pp. 383–412. [Google Scholar] [CrossRef]
- Errandonea, I.; Beltrán, S.; Arrizabalaga, S. Digital Twin for maintenance: A literature review. Comput. Ind. 2020, 123, 103316. [Google Scholar] [CrossRef]
- Kasper, L.; Birkelbach, F.; Schwarzmayr, P.; Steindl, G.; Ramsauer, D.; Hofmann, R. Toward a Practical Digital Twin Platform Tailored to the Requirements of Industrial Energy Systems. Appl. Sci. 2022, 12, 6981. [Google Scholar] [CrossRef]
- Lo, C.; Chen, C.; Zhong, R.Y. A review of digital twin in product design and development. Adv. Eng. Inform. 2021, 48, 101297. [Google Scholar] [CrossRef]
- Bazmohammadi, N.; Madary, A.; Vasquez, J.C.; Bazmohammadi, H.; Khan, B.; Wu, Y.; Guerrero, J.M. Microgrid Digital Twins: Concepts, Applications, and Future Trends. IEEE Access 2021, 10, 2284–2302. [Google Scholar] [CrossRef]
- Zhang, L.; Zhou, L.; Horn, B.K. Building a right digital twin with model engineering. J. Manuf. Syst. 2021, 59, 151–164. [Google Scholar] [CrossRef]
- Kutzke, D.T.; Carter, J.B.; Hartman, B.T. Subsystem selection for digital twin development: A case study on an unmanned underwater vehicle. Ocean Eng. 2021, 223, 108629. [Google Scholar] [CrossRef]
- Rasor, R.; Göllner, D.; Bernijazov, R.; Kaiser, L.; Dumitrescu, R. Towards collaborative life cycle specification of digital twins in manufacturing value chains. Procedia CIRP 2021, 98, 229–234. [Google Scholar] [CrossRef]
- Liu, J.; Zhou, H.; Liu, X.; Tian, G.; Wu, M.; Cao, L.; Wang, W. Dynamic Evaluation Method of Machining Process Planning Based on Digital Twin. IEEE Access 2019, 7, 19312–19323. [Google Scholar] [CrossRef]
- Sierla, S.; Azangoo, M.; Rainio, K.; Papakonstantinou, N.; Fay, A.; Honkamaa, P.; Vyatkin, V. Roadmap to semi-automatic generation of digital twins for brownfield process plants. J. Ind. Inf. Integr. 2021, 27, 100282. [Google Scholar] [CrossRef]
- Tao, F.; Zhang, M. Digital Twin Shop-Floor: A New Shop-Floor Paradigm Towards Smart Manufacturing. IEEE Access 2017, 5, 20418–20427. [Google Scholar] [CrossRef]
- Singh, S.; Weeber, M.; Birke, K.P. Advancing digital twin implementation: A toolbox for modelling and simulation. Procedia CIRP 2021, 99, 567–572. [Google Scholar] [CrossRef]
- Bevilacqua, M.; Bottani, E.; Ciarapica, F.E.; Costantino, F.; Di Donato, L.; Ferraro, A.; Mazzuto, G.; Monteriù, A.; Nardini, G.; Ortenzi, M.; et al. Digital Twin Reference Model Development to Prevent Operators’ Risk in Process Plants. Sustainability 2020, 12, 1088. [Google Scholar] [CrossRef] [Green Version]
- Leng, J.; Liu, Q.; Ye, S.; Jing, J.; Wang, Y.; Zhang, C.; Zhang, D.; Chen, X. Digital twin-driven rapid reconfiguration of the automated manufacturing system via an open architecture model. Robot. Comput.-Integr. Manuf. 2020, 63, 101895. [Google Scholar] [CrossRef]
- Fan, Y.; Yang, J.; Chen, J.; Hu, P.; Wang, X.; Xu, J.; Zhou, B. A digital-twin visualized architecture for Flexible Manufacturing System. J. Manuf. Syst. 2021, 60, 176–201. [Google Scholar] [CrossRef]
- Aheleroff, S.; Xu, X.; Zhong, R.Y.; Lu, Y. Digital Twin as a Service (DTaaS) in Industry 4.0: An Architecture Reference Model. Adv. Eng. Inform. 2021, 47, 101225. [Google Scholar] [CrossRef]
- Alam, K.M.; El Saddik, A. C2PS: A Digital Twin Architecture Reference Model for the Cloud-Based Cyber-Physical Systems. IEEE Access 2017, 5, 2050–2062. [Google Scholar] [CrossRef]
- Dai, S.; Zhao, G.; Yu, Y.; Zheng, P.; Bao, Q.; Wang, W. Ontology-based information modeling method for digital twin creation of as-fabricated machining parts. Robot. Comput.-Integr. Manuf. 2021, 72, 102173. [Google Scholar] [CrossRef]
- Pylianidis, C.; Snow, V.; Overweg, H.; Osinga, S.; Kean, J.; Athanasiadis, I.N. Simulation-assisted machine learning for operational digital twins. Environ. Model. Softw. 2022, 148, 105274. [Google Scholar] [CrossRef]
- Post, J.; Groen, M.; Klaseboer, G. Physical Model Based Digital Twins in Manufacturing Processes. In Proceedings of the 10th forming Technology Forum, Enschede, The Netherlands, 12–13 October 2017. [Google Scholar]
- Rasheed, A.; San, O.; Kvamsdal, T. Digital Twin: Values, Challenges and Enablers From a Modeling Perspective. IEEE Access 2020, 8, 21980–22012. [Google Scholar] [CrossRef]
- Chen, G.; Zhu, J.; Zhao, Y.; Hao, Y.; Yang, C.; Shi, Q. Digital twin modeling for temperature field during friction stir welding. J. Manuf. Process. 2021, 64, 898–906. [Google Scholar] [CrossRef]
- Ogata, K. Modern Control Engineering, 4th ed.; Prentice Hall PTR: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Eckhart, M.; Ekelhart, A. A Specification-based State Replication Approach for Digital Twins. In Proceedings of the 2018 Workshop on Cyber-Physical Systems Security and PrivaCy, Toronto, ON, Canada, 15–19 October 2018; ACM: Toronto, ON, Canada, 2018; pp. 36–47. [Google Scholar] [CrossRef]
- Luenberger, D.G. Observing the State of a Linear System. IEEE Trans. Mil. Electron. 1964, 8, 74–80. [Google Scholar] [CrossRef]
- TensorFlow. Available online: https://www.tensorflow.org/ (accessed on 9 May 2022).
- PyTorch. Available online: https://pytorch.org/ (accessed on 9 May 2022).
- OpenCV. Available online: https://opencv.org/ (accessed on 9 May 2022).
- Apache Kafka. Available online: https://kafka.apache.org/ (accessed on 9 May 2022).
- Apache Spark. Available online: https://spark.apache.org/ (accessed on 9 May 2022).
- Willard, J.; Jia, X.; Xu, S.; Steinbach, M.; Kumar, V. Integrating Scientific Knowledge with Machine Learning for Engineering and Environmental Systems; Association for Computing Machinery: New York, NY, USA, 2021. [Google Scholar]
- Abburu, S.; Berre, A.J.; Jacoby, M.; Roman, D.; Stojanovic, L.; Stojanovic, N. COGNITWIN—Hybrid and Cognitive Digital Twins for the Process Industry. In Proceedings of the 2020 IEEE International Conference on Engineering, Technology and Innovation (ICE/ITMC), Cardiff, UK, 15–17 June 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Ritto, T.; Rochinha, F. Digital twin, physics-based model, and machine learning applied to damage detection in structures. Mech. Syst. Signal Process. 2021, 155, 107614. [Google Scholar] [CrossRef]
- Azangoo, M.; Salmi, J.; Yrjölä, I.; Bensky, J.; Santillan, G.; Papakonstantinou, N.; Sierla, S.; Vyatkin, V. Hybrid Digital Twin for process industry using Apros simulation environment. In Proceedings of the 2021 26th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vasteras, Sweden, 7–10 September 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Chakraborty, S.; Adhikari, S. Machine learning based digital twin for dynamical systems with multiple time-scales. Comput. Struct. 2021, 243, 106410. [Google Scholar] [CrossRef]
- Chakraborty, S.; Adhikari, S.; Ganguli, R. The role of surrogate models in the development of digital twins of dynamic systems. Appl. Math. Model. 2021, 90, 662–681. [Google Scholar] [CrossRef]
- Ayani, M.; Ganebäck, M.; Ng, A.H. Digital Twin: Applying emulation for machine reconditioning. Procedia CIRP 2018, 72, 243–248. [Google Scholar] [CrossRef]
- Tao, F.; Zhang, M.; Liu, Y.; Nee, A. Digital twin driven prognostics and health management for complex equipment. CIRP Ann. 2018, 67, 169–172. [Google Scholar] [CrossRef]
- Anbalagan, A.; Shivakrishna, B.; Srikanth, K.S. A digital twin study for immediate design / redesign of impellers and blades: Part 1: CAD modelling and tool path simulation. Mater. Today Proc. 2021, 46, 8209–8217. [Google Scholar] [CrossRef]
- Tao, F.; Qi, Q.; Wang, L.; Nee, A. Digital Twins and Cyber–Physical Systems toward Smart Manufacturing and Industry 4.0: Correlation and Comparison. Engineering 2019, 5, 653–661. [Google Scholar] [CrossRef]
- Borth, M.; Verriet, J.; Muller, G. Digital Twin Strategies for SoS 4 Challenges and 4 Architecture Setups for Digital Twins of SoS. In Proceedings of the 2019 14th Annual Conference System of Systems Engineering (SoSE), Anchorage, AK, USA, 19–22 May 2019; pp. 164–169. [Google Scholar] [CrossRef]
- Autiosalo, J.; Siegel, J.; Tammi, K. Twinbase: Open-Source Server Software for the Digital Twin Web. IEEE Access 2021, 9, 140779–140798. [Google Scholar] [CrossRef]
- Cimino, C.; Ferretti, G.; Leva, A. Harmonising and integrating the Digital Twins multiverse: A paradigm and a toolset proposal. Comput. Ind. 2021, 132, 103501. [Google Scholar] [CrossRef]
- Eramo, R.; Bordeleau, F.; Combemale, B.; van den Brand, M.; Wimmer, M.; Wortmann, A. Conceptualizing Digital Twins. IEEE Softw. 2021, 39, 39–46. [Google Scholar] [CrossRef]
- Zheng, P.; Sivabalan, A.S. A generic tri-model-based approach for product-level digital twin development in a smart manufacturing environment. Robot. Comput.-Integr. Manuf. 2020, 64, 101958. [Google Scholar] [CrossRef]
- Binsfeld, T.; Gerlach, B. Quantifying the Benefits of Digital Supply Chain Twins — A Simulation Study in Organic Food Supply Chains. Logistics 2022, 6, 46. [Google Scholar] [CrossRef]
- Sahlab, N.; Kamm, S.; Müller, T.; Jazdi, N.; Weyrich, M. Knowledge Graphs as Enhancers of Intelligent Digital Twins. In Proceedings of the 2021 4th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS), Victoria, BC, Canada, 10–12 May 2021; pp. 19–24. [Google Scholar] [CrossRef]
- Mashaly, M. Connecting the Twins: A Review on Digital Twin Technology & its Networking Requirements. Procedia Comput. Sci. 2021, 184, 299–305. [Google Scholar] [CrossRef]
- Platenius-Mohr, M.; Malakuti, S.; Grüner, S.; Schmitt, J.; Goldschmidt, T. File- and API-based interoperability of digital twins by model transformation: An IIoT case study using asset administration shell. Future Gener. Comput. Syst. 2020, 113, 94–105. [Google Scholar] [CrossRef]
- Jiang, Z.; Guo, Y.; Wang, Z. Digital twin to improve the virtual-real integration of industrial IoT. J. Ind. Inf. Integr. 2021, 22, 100196. [Google Scholar] [CrossRef]
- Barbieri, G.; Gutierrez, D.A. A GEMMA-GRAFCET Methodology to enable Digital Twin based on Real-Time Coupling. Procedia Comput. Sci. 2021, 180, 13–23. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Y.; Qian, C. The enhanced resource modeling and real-time transmission technologies for Digital Twin based on QoS considerations. Robot. Comput.-Integr. Manuf. 2022, 75, 102284. [Google Scholar] [CrossRef]
- Feng, H.; Chen, D.; Lv, H. Sensible and secure IoT communication for digital twins, cyber twins, web twins. Internet of Things and Cyber-Physical Systems 2021, 1, 34–44. [Google Scholar] [CrossRef]
- Bonney, M.S.; de Angelis, M.; Wagg, D.; Borgo, M.D. Digital Twin Operational Platform for Connectivity and Accessibility using Flask Python. In Proceedings of the 2021 ACM/IEEE International Conference on Model Driven Engineering Languages and Systems Companion (MODELS-C), Fukuoka, Japan, 10–15 October 2021; pp. 237–241. [Google Scholar] [CrossRef]
- Borghesi, A.; Di Modica, G.; Bellavista, P.; Gowtham, V.; Willner, A.; Nehls, D.; Kintzler, F.; Cejka, S.; Tisbeni, S.R.; Costantini, A.; et al. IoTwins: Design and Implementation of a Platform for the Management of Digital Twins in Industrial Scenarios. In Proceedings of the 2021 IEEE/ACM 21st International Symposium on Cluster, Cloud and Internet Computing (CCGrid), Melbourne, Australia, 10–13 May 2021; pp. 625–633. [Google Scholar] [CrossRef]
- Bolender, T.; Bürvenich, G.; Dalibor, M.; Rumpe, B.; Wortmann, A. Self-Adaptive Manufacturing with Digital Twins. In Proceedings of the 2021 International Symposium on Software Engineering for Adaptive and Self-Managing Systems (SEAMS), Madrid, Spain, 18–24 May 2021; pp. 156–166. [Google Scholar] [CrossRef]
- Eclipse Ditto. Available online: https://www.eclipse.org/ditto/ (accessed on 7 February 2022).
- FIWARE. Available online: https://www.fiware.org/ (accessed on 9 May 2022).
- Kamath, V.; Morgan, J.; Ali, M.I. Industrial IoT and Digital Twins for a Smart Factory: An open source toolkit for application design and benchmarking. In Proceedings of the 2020 Global Internet of Things Summit (GIoTS), Dublin, Ireland, 3 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Albo, A.; Svedlund, L.; Falkman, P. Modular Virtual Preparation method of production systems using a Digital Twin architecture. In Proceedings of the 2021 26th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vasteras, Sweden, 7–10 September 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Codesys Development System. Available online: https://store.codesys.com/ (accessed on 21 February 2022).
- Matlab and Simulink. Available online: https://mathworks.com/ (accessed on 21 February 2022).
- Webots. Available online: https://cyberbotics.com/ (accessed on 21 February 2022).
- Eckhart, M.; Ekelhart, A. Towards Security-Aware Virtual Environments for Digital Twins. In Proceedings of the 4th ACM Workshop on Cyber-Physical System Security, Incheon, Korea, 4 June 2018; ACM: Incheon, Korea, 2018; pp. 61–72. [Google Scholar] [CrossRef]
- Lu, Y.; Liu, C.; Wang, K.I.K.; Huang, H.; Xu, X. Digital Twin-driven smart manufacturing: Connotation, reference model, applications and research issues. Robot. Comput.-Integr. Manuf. 2020, 61, 101837. [Google Scholar] [CrossRef]
- Hribernik, K.; Cabri, G.; Mandreoli, F.; Mentzas, G. Autonomous, context-aware, adaptive Digital Twins—State of the art and roadmap. Comput. Ind. 2021, 133, 103508. [Google Scholar] [CrossRef]
- Cimino, C.; Negri, E.; Fumagalli, L. Review of digital twin applications in manufacturing. Comput. Ind. 2019, 113, 103130. [Google Scholar] [CrossRef]
- Davila Delgado, J.M.; Oyedele, L. Digital Twins for the built environment: Learning from conceptual and process models in manufacturing. Adv. Eng. Inform. 2021, 49, 101332. [Google Scholar] [CrossRef]
- Malik, A.A.; Brem, A. Digital twins for collaborative robots: A case study in human-robot interaction. Robot. Comput.-Integr. Manuf. 2021, 68, 102092. [Google Scholar] [CrossRef]
- Henrichs, E.; Noack, T.; Pinzon Piedrahita, A.M.; Salem, M.A.; Stolz, J.; Krupitzer, C. Can a Byte Improve Our Bite? An Analysis of Digital Twins in the Food Industry. Sensors 2022, 22, 115. [Google Scholar] [CrossRef]
- Kantaros, A.; Piromalis, D.; Tsaramirsis, G.; Papageorgas, P.; Tamimi, H. 3D Printing and Implementation of Digital Twins: Current Trends and Limitations. Appl. Syst. Innov. 2022, 5, 7. [Google Scholar] [CrossRef]
- Wu, L.; Leng, J.; Ju, B. Digital Twins-Based Smart Design and Control of Ultra-Precision Machining: A Review. Symmetry 2021, 13, 1717. [Google Scholar] [CrossRef]
- Semenkov, K.; Promyslov, V.; Poletykin, A.; Mengazetdinov, N. Validation of Complex Control Systems with Heterogeneous Digital Models in Industry 4.0 Framework. Machines 2021, 9, 62. [Google Scholar] [CrossRef]
- Steindl, G.; Stagl, M.; Kasper, L.; Kastner, W.; Hofmann, R. Generic Digital Twin Architecture for Industrial Energy Systems. Appl. Sci. 2020, 10, 8903. [Google Scholar] [CrossRef]
- Neethirajan, S.; Kemp, B. Digital Twins in Livestock Farming. Animals 2021, 11, 1008. [Google Scholar] [CrossRef]
- Rathore, M.M.; Shah, S.A.; Shukla, D.; Bentafat, E.; Bakiras, S. The Role of AI, Machine Learning, and Big Data in Digital Twinning: A Systematic Literature Review, Challenges, and Opportunities. IEEE Access 2021, 9, 32030–32052. [Google Scholar] [CrossRef]
- Perno, M.; Hvam, L.; Haug, A. Implementation of digital twins in the process industry: A systematic literature review of enablers and barriers. Comput. Ind. 2022, 134, 103558. [Google Scholar] [CrossRef]
- Schroeder, G.N.; Steinmetz, C.; Rodrigues, R.N.; Henriques, R.V.B.; Rettberg, A.; Pereira, C.E. A Methodology for Digital Twin Modeling and Deployment for Industry 4.0. Proc. IEEE 2021, 109, 556–567. [Google Scholar] [CrossRef]
- Huang, L.; Joseph, A.D.; Nelson, B.; Rubinstein, B.I.P.; Tygar, J.D. Adversarial machine learning. In Proceedings of the AISec ’11, Chicago, IL, USA, 21 October 2011. [Google Scholar]
- Pitropakis, N.; Panaousis, E.; Giannetsos, T.; Anastasiadis, E.; Loukas, G. A taxonomy and survey of attacks against machine learning. Comput. Sci. Rev. 2019, 34, 100199. [Google Scholar] [CrossRef]
- Sánchez, H.S.; Rotondo, D.; Escobet, T.; Puig, V.; Quevedo, J. Bibliographical review on cyber attacks from a control oriented perspective. Annu. Rev. Control 2019, 48, 103–128. [Google Scholar] [CrossRef] [Green Version]
- Teixeira, A.; Shames, I.; Sandberg, H.; Johansson, K.H. A secure control framework for resource-limited adversaries. Automatica 2015, 51, 135–148. [Google Scholar] [CrossRef] [Green Version]
- Shinde, R.; Patil, S.; Kotecha, K.; Ruikar, K. Blockchain for Securing AI Applications and Open Innovations. J. Open Innov. Technol. Mark. Complex. 2021, 7, 189. [Google Scholar] [CrossRef]
- Guo, S.; Li, X.; Mu, Z. Adversarial Machine Learning on Social Network: A Survey. Front. Phys. 2021, 9, 766540. [Google Scholar] [CrossRef]
- Lin, L.; Bao, H.; Dinh, N. Uncertainty quantification and software risk analysis for digital twins in the nearly autonomous management and control systems: A review. Ann. Nucl. Energy 2021, 160, 108362. [Google Scholar] [CrossRef]
- Lee, D.; Lee, S.H.; Masoud, N.; Krishnan, M.; Li, V.C. Integrated digital twin and blockchain framework to support accountable information sharing in construction projects. Autom. Constr. 2021, 127, 103688. [Google Scholar] [CrossRef]
- Mandolla, C.; Petruzzelli, A.M.; Percoco, G.; Urbinati, A. Building a digital twin for additive manufacturing through the exploitation of blockchain: A case analysis of the aircraft industry. Comput. Ind. 2019, 109, 134–152. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Optimization | |||
|---|---|---|---|
| Reference | Application | Modeling | Function |
| An et al. [25] | Aircrafts | Control Models | Reduce methane emissions. |
| Bhatti et al. [24] | Electric cars | Hybrid Model | Increase energy efficiency and reduced greenhouse gas emissions. |
| Bottani et al. [26] | Industry | Model-based | Optimize and prevent high-risk events for a beverage pasteurization system. |
| Guo et al. [27] | Industry | Structural | Optimize the layout of assembly positions in the manufacturing industry. |
| Gonzalez et al. [28] | Industry | Control Models | Evaluate, control and correct a transportation system. |
| Stan et al. [22] | Industry | Data-based | Distribution planning, activity scheduling, resource allocation, resource monitoring, process control and maintenance of resources. |
| Wang et al. [23] | 5G Networks | Data-based | Manage 5G slicing efficiently in terms of cost and performance. |
| Security | |||
| Reference | Application | Modeling | Function |
| Cainelli et al. [29] | 5G Networs | Communication | Design resilient 5G networks for industrial systems to adapt their behavior in case of unforeseen events. |
| Huang et al. [30] | Industry | Data-based | Detect anomalies with real-time monitoring. |
| Saad et al. [31] | Industry | Control Models | Improve resilience in microgrids against coordinated attacks. |
| Salvi et al. [32] | Industry | Data-based | Improve attack response and minimize the impact in power systems. |
| Schellenberger et al. [33] | Industry | Control Models | Detect cyber–physical attacks in CPS. |
| Sousa et al. [34] | Industry | Data-based | Mitigate DoS attacks on critical infrastructures. |
| Xu et al. [35] | Industry | Control Models | Secure estimation and control for CPS attacks. |
| Xu et al. [36] | Industry | Data-based | Live data analysis to detect attacks in CPS. |
| Monitoring and Prediction | |||
| Reference | Application | Modeling | Function |
| Angjeliu et al. [37] | Buildings | Hybrid | Optimize restoration works. |
| Barbi et al. [38] | Ocean Observation | Data-based | Analyze executed actions and evaluate different scenarios in the virtual environment. |
| Bartos et al. [39] | Drainage networks | Control Models | Water management system to prevent flooding and improve the water quality in real time. |
| Booyse et al. [40] | Gearbox and Aero-Propulsion | Data-based | System health monitoring to detect and diagnose system problems and predict maintenance. |
| Bhatti et al. [41] | Industrial Robots | Hybrid | Detect and diagnose faults. |
| Modoni et al. [42] | Industry | Control Models | Improve the quality of produced micro manufactured devices. |
| Moghadam et al. [43] | Industry | Control Models | Monitor and estimate the fatigue of system components. |
| Improve the Development Process | |||
| Reference | Application | Modeling | Function |
| Dong et al. [44] | Industry | Other | Propose product design improvements and innovations. |
| Fedorko et al. [45] | Industry | Control Models | Test physical properties in conveyor belts. |
| Li et al. [46] | Industry | Knowledge-based | Create more sustainable manufacturing methods to control environmental and social impacts. |
| Liu et al. [47] | Industry | Bayesian Network | Improve traceability and quality control in manufacturing processes. |
| Sun et al. [48] | Industry | Structural | Improve quality control and assembly efficiency in high-precision products. |
| Training | |||
| Reference | Application | Modeling | Function |
| Cortes et al. [49] | Industry | Control Models | Teach industrial concepts and techniques to create qualified workforces. |
| Waat et al. [50] | Industry | Structural | Factory assembly training with AR technologies for new operators. |
| Behavior Model | ||
|---|---|---|
| Model Type | Characteristics | Examples |
| Control Models | Based on control theory. They use the laws of physics and compare simulated results with known information, represented by mathematical models. | An et al. [25], Bottani et al. [26], Gonzalez et al. [28], Saad et al. [31], Schellenberger et al. [33], Xu et al. [35], Bartos et al. [39], Modoni et al. [42], Moghadam et al. [43], Fedorko et al. [45], Cortes et al. [49] |
| Data-Dependent Models | Based on artificial intelligence. They use data structures that retain all the variables describing the reality at a level of abstraction. | Stan et al. [22], Wang et al. [23], Huang et al. [30], Salvi et al. [32], Sousa et al. [34], Xu et al. [36], Barbi et al. [38], Booyse et al. [40] |
| Hybrid Control–Data Models | Combine control and data-dependent models to obtain the advantages of both of them. | Angjeliu et al. [37], Bhatti et al. [41] |
| Other Models | They use the relation of the components, e.g., graph, communication, process, ontology or knowledge-based models. | Bhatti et al. [24], Cainelli et al. [29], Dai et al. [68], Pylianidis et al. [69], Dong et al. [44], Li et al. [46], Liu et al. [47] |
| Structural Model | ||
| Model Type | Characteristics | Examples |
| Physical Model | Represents physical properties and phenomena, such as deformation, cracking and corrosion. | Post et al. [70], Mathupriya et al. [10] |
| Geometrical Model | Reflects the geometry, shapes, sizes, positions, assembling machine components, kinematics, logic and interfaces of the real system. | Guo et al. [27], Sun et al. [48], Waat et al. [50] |
| Model Integration Technique | ||
|---|---|---|
| Integration Method | Characteristics | Examples |
| Hierarchical | It builds complex systems by integrating smaller and simpler components. | Tao et al. [90], Borth et al. [91] |
| Collaborative | The different components interact and simulate a collaborative behavior among several assets. | Autiosalo et al. [92], Cimino et al. [93], Eramo et al. [94], Zheng et al. [95] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Segovia, M.; Garcia-Alfaro, J. Design, Modeling and Implementation of Digital Twins. Sensors 2022, 22, 5396. https://doi.org/10.3390/s22145396
Segovia M, Garcia-Alfaro J. Design, Modeling and Implementation of Digital Twins. Sensors. 2022; 22(14):5396. https://doi.org/10.3390/s22145396
Chicago/Turabian StyleSegovia, Mariana, and Joaquin Garcia-Alfaro. 2022. "Design, Modeling and Implementation of Digital Twins" Sensors 22, no. 14: 5396. https://doi.org/10.3390/s22145396
APA StyleSegovia, M., & Garcia-Alfaro, J. (2022). Design, Modeling and Implementation of Digital Twins. Sensors, 22(14), 5396. https://doi.org/10.3390/s22145396