
Design, Implementation and Experimental Investigation of a Pedestrian Street Crossing Assistance System Based on Visible Light Communications

 , , and
, , and
Abstract
:1. Introduction
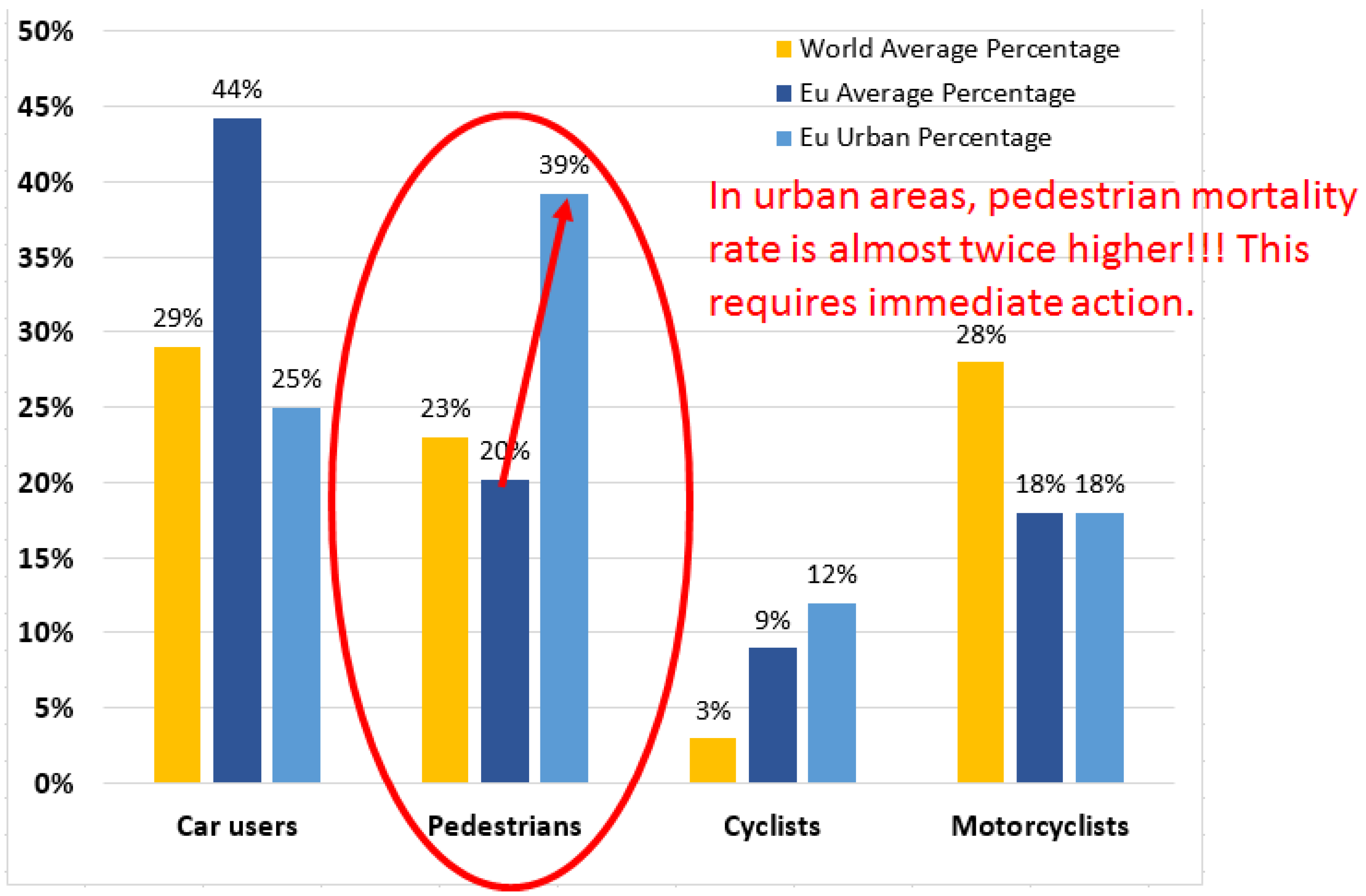
2. Road Accidents in Figures: The Vulnerability of Pedestrians and Solutions to This Issue
3. Design and Implementation of the Pedestrian Crosswalk Assistance System
3.1. Pedestrian Presence and Localization Unit
3.2. Visible Light Communications Component
4. Experimental Evaluation of the Pedestrian Crossing Assistance System
4.1. Experimental Testing of the Pedestrian Presence and Localization System
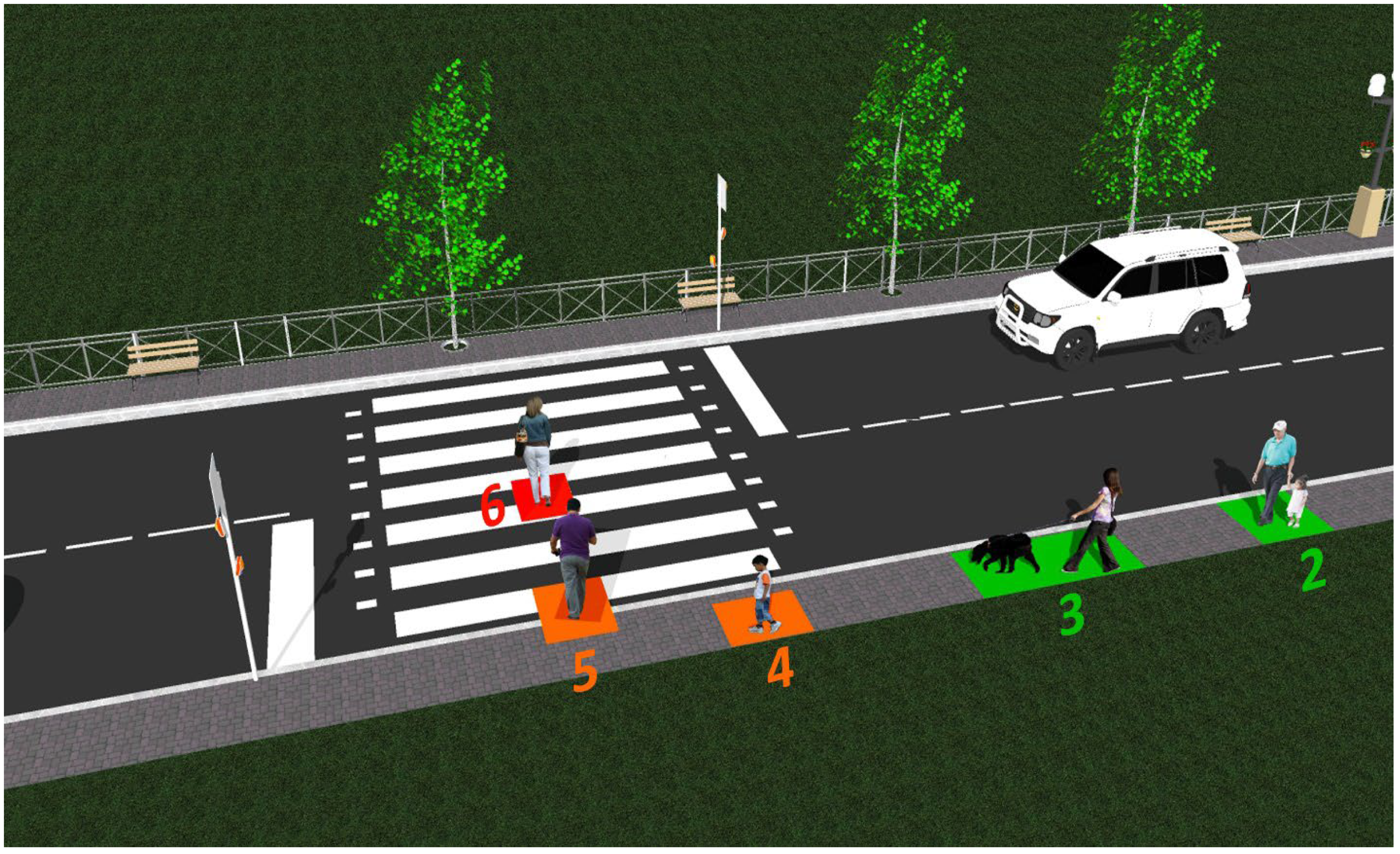
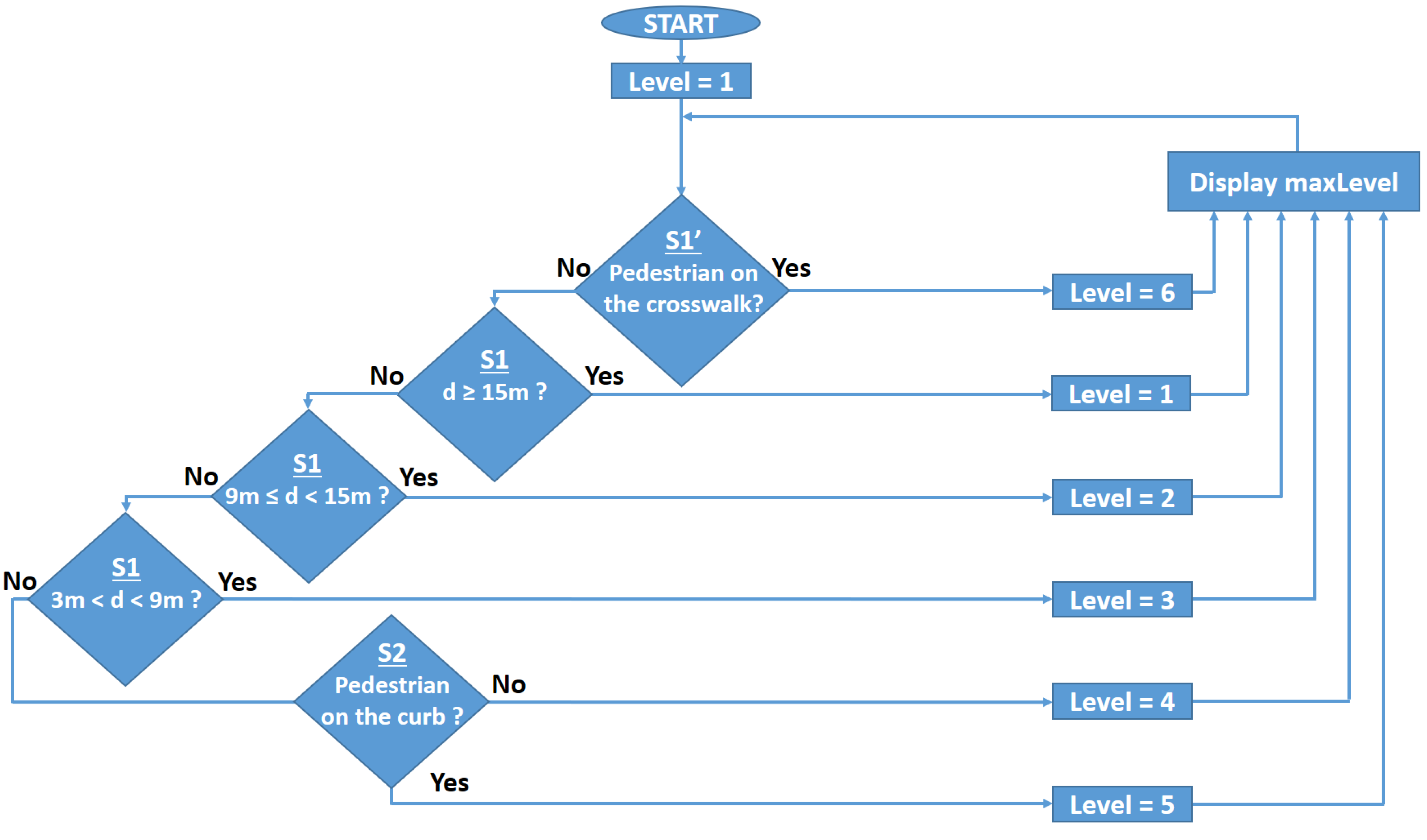
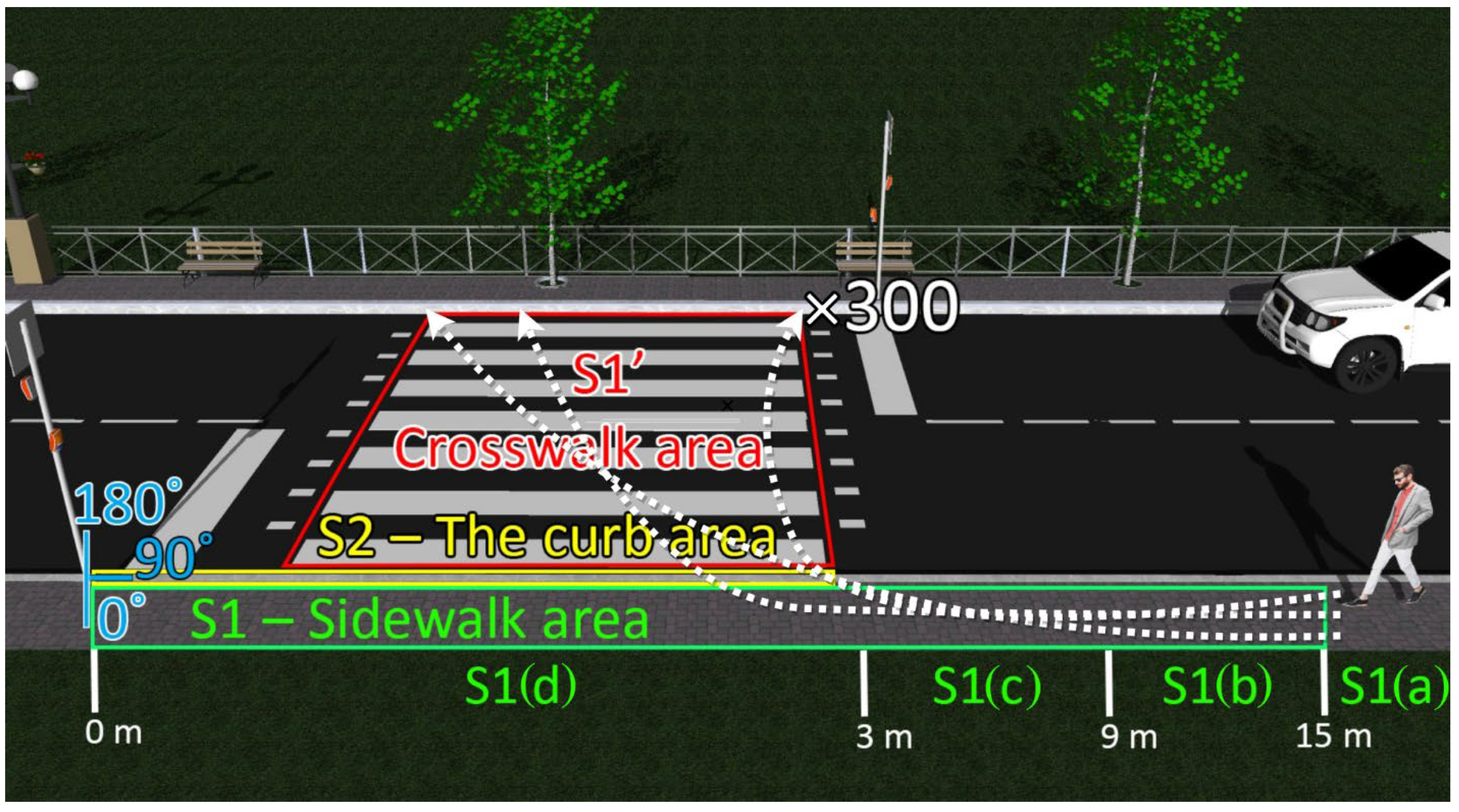
- The S1’ area delineates the entire crosswalk, 3 m wide and 7 m long, covered by the LIDAR sensor scanning the zone from 90° to 180° in 2° steps. Any presence on the crosswalk will be detected by a lower measured distance than the limit imposed in the first part of the experiment, for every angle in this zone, and an alarm of Level 6 will be triggered;
- The S1 area delineates the sidewalk zone of interest, covered by the LIDAR sensor scanning the zone from 0° to 90° in 2° steps, further divided into four parts:
- (a)
- A more than 15 m zone from the sign, which will ensure that a pedestrian at a greater distance will not trigger a more than Level 1 alarm;
- (b)
- A 9 m to 15 m zone from the sign, which will ensure that a pedestrian in this zone will trigger a Level 2 alarm;
- (c)
- A 3 m to 9 m zone, which will ensure that a pedestrian in this zone will trigger a Level 3 alarm;
- (d)
- A 0 to 3 m zone, which will ensure that a pedestrian in this zone will trigger a Level 4 alarm.
- The S2 area delineates the curb zone of the sidewalk in front of the crosswalk area, covered by the LIDAR sensor and the ultrasound sensor, which will ensure that a pedestrian in this zone will trigger a Level 5 alarm, indicating that a person is on the verge of crossing the street.
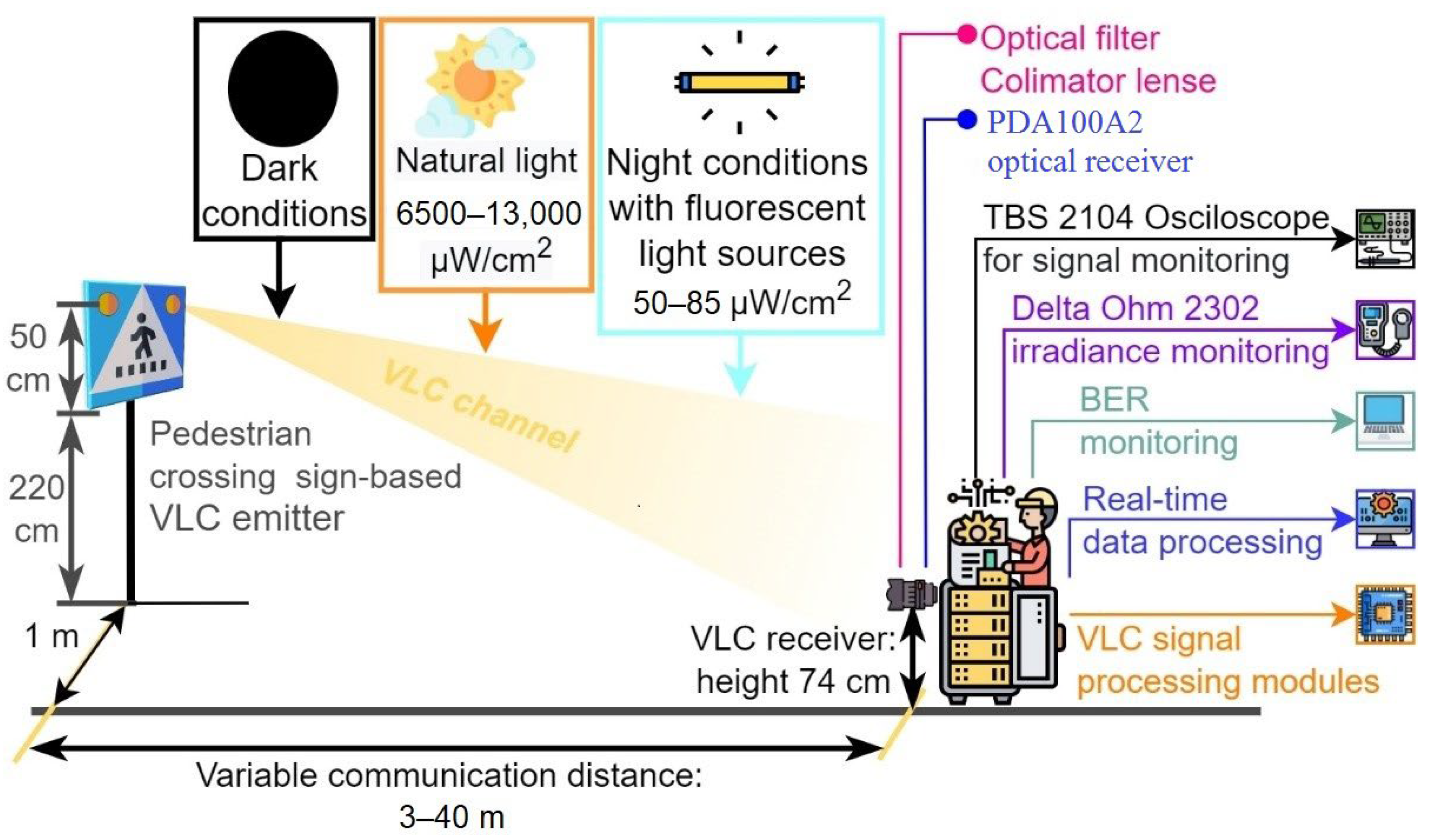
4.2. Experimental Testing of the Visible Light Communications System
5. Discussion about the Importance of This Work, Differences from Other Approaches and Perspectives
5.1. Debate on the Results
- -
- Low power VLC emitter has a similar optical power as the ones encountered on standard roads, (i.e., 6.8 µW/cm2 at 1 m);
- -
- A 2.7 m high traffic sign, similar to the height of a real traffic sign, which limits the coverage area and the irradiance level that reaches the VLC receiver;
- -
- The VLC receiver is positioned at a height of only 74 cm–similar to the case when the VLC receiver is positioned at the vehicle front light level;
- -
- Narrow FOV VLC receiver that enables enhanced noise resilience.
5.2. Debate on the Importance of This Work
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Matheus, L.E.M.; Vieira, A.B.; Vieira, L.F.M.; Vieira, M.A.M.; Gnawali, O. Visible Light Communication: Concepts, Applications and Challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3204–3237. [Google Scholar] [CrossRef]
- Rehman, S.U.; Ullah, S.; Chong, P.H.J.; Yongchareon, S.; Komosny, D. Visible Light Communication: A System Perspective—Overview and Challenges. Sensors 2019, 19, 1153. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yu, T.-C.; Huang, W.-T.; Lee, W.-B.; Chow, C.-W.; Chang, S.-W.; Kuo, H.-C. Visible Light Communication System Technology Review: Devices, Architectures, and Applications. Crystals 2021, 11, 1098. [Google Scholar] [CrossRef]
- Cole, M.; Clayton, H.; Martin, K. Solid-State Lighting: The New Normal in Lighting. IEEE Trans. Ind. Appl. 2015, 51, 109–119. [Google Scholar] [CrossRef]
- Long, X.; He, J.; Zhou, J.; Fang, L.; Zhou, X.; Ren, F.; Xu, T. A review on light-emitting diode based automotive headlamps. Renew. Sustain. Energy Rev. 2015, 41, 29–41. [Google Scholar] [CrossRef]
- James Singh, K.; Huang, Y.-M.; Ahmed, T.; Liu, A.-C.; Huang Chen, S.-W.; Liou, F.-J.; Wu, T.; Lin, C.-C.; Chow, C.-W.; Lin, G.-R.; et al. Micro-LED as a Promising Candidate for High-Speed Visible Light Communication. Appl. Sci. 2020, 10, 7384. [Google Scholar] [CrossRef]
- Najda, S.P.; Perlin, P.; Suski, T.; Marona, L.; Leszczyński, M.; Wisniewski, P.; Stanczyk, S.; Schiavon, D.; Slight, T.; Watson, M.A.; et al. GaN Laser Diode Technology for Visible-Light Communications. Electronics 2022, 11, 1430. [Google Scholar] [CrossRef]
- Ji, R.; Wang, S.; Liu, Q.; Lu, W. High-Speed Visible Light Communications: Enabling Technologies and State of the Art. Appl. Sci. 2018, 8, 589. [Google Scholar] [CrossRef] [Green Version]
- Cailean, A.; Dimian, M. Impact of IEEE 802.15.7 Standard on Visible Light Communications Usage in Automotive Applications. IEEE Commun. Mag. 2017, 55, 169–175. [Google Scholar] [CrossRef]
- Hussein, A.T.; Alresheedi, M.T.; Elmirghani, J.M.H. 20 Gb/s Mobile Indoor Visible Light Communication System Employing Beam Steering and Computer Generated Holograms. J. Lightwave Technol. 2015, 33, 5242–5260. [Google Scholar] [CrossRef]
- Bian, R.; Tavakkolnia, I.; Haas, H. 15.73 Gb/s Visible Light Communication With Off-the-Shelf LEDs. J. Lightwave Technol. 2019, 37, 2418–2424. [Google Scholar] [CrossRef] [Green Version]
- Tsonev, D.; Videv, S.; Haas, H. Towards a 100 Gb/s visible light wireless access network. Opt. Express 2015, 23, 1627–1637. [Google Scholar] [CrossRef] [PubMed]
- LiFi, High-Speed Internet Throught Invisible Light. Available online: https://www.oledcomm.net/ (accessed on 28 February 2022).
- Căilean, A.M.; Dimian, M. Current Challenges for Visible Light Communications Usage in Vehicle Applications: A Survey. IEEE Commun. Surv. Tutor. 2017, 19, 2681–2703. [Google Scholar] [CrossRef]
- Al-Kinani, A.; Wang, C.-X.; Zhou, L.; Zhang, W. Optical Wireless Communication Channel Measurements and Models. IEEE Commun. Surv. Tutor. 2018, 20, 1939–1962. [Google Scholar] [CrossRef]
- Memedi, A.; Dressler, F. Vehicular Visible Light Communications: A Survey. IEEE Commun. Surv. Tutor. 2021, 23, 161–181. [Google Scholar] [CrossRef]
- Kim, Y.H.; Cahyadi, W.A.; Chung, Y.H. Experimental Demonstration of VLC-Based Vehicle-to-Vehicle Communications under Fog Conditions. IEEE Photonics J. 2015, 7, 7905309. [Google Scholar] [CrossRef]
- Elamassie, M.; Karbalayghareh, M.; Miramirkhani, F.; Kizilirmak, R.C.; Uysal, M. Effect of Fog and Rain on the Performance of Vehicular Visible Light Communications. In Proceedings of the 2018 IEEE 87th Vehicular Technology Conference (VTC Spring), Porto, Portugal, 3–6 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Ebrahim, K.J.; Al-Omary, A. Sandstorm Effect on Visible Light Communication. In Proceedings of the 2017 9th IEEE-GCC Conference and Exhibition (GCCCE), Manama, Bahrain, 8–11 May 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–7. [Google Scholar]
- Zaki, R.W.; Fayed, H.A.; Abd El Aziz, A.; Aly, M.H. Outdoor Visible Light Communication in Intelligent Transportation Systems: Impact of Snow and Rain. Appl. Sci. 2019, 9, 5453. [Google Scholar] [CrossRef] [Green Version]
- Avătămăniței, S.A.; Căilean, A.-M.; Done, A.; Dimian, M.; Prelipceanu, M. Noise Resilient Outdoor Traffic Light Visible Light Communications System Based on Logarithmic Transimpedance Circuit: Experimental Demonstration of a 50 m Reliable Link in Direct Sun Exposure. Sensors 2020, 20, 909. [Google Scholar] [CrossRef] [Green Version]
- Avătămăniței, S.-A.; Căilean, A.-M.; Done, A.; Dimian, M.; Popa, V. Experimental Evaluation of Traffic Light to Vehicle Visible Light Communications in Snowfall Conditions. In Proceedings of the 2020 7th International Conference on Control, Decision and Information Technologies (CoDIT), Prague, Czech Republic, 29 June–2 July 2020; pp. 693–696. [Google Scholar] [CrossRef]
- Avătămăniței, S.-A.; Căilean, A.-M.; Done, A.; Dimian, M.; Popa, V.; Prelipceanu, M. Design and Intensive Experimental Evaluation of an Enhanced Visible Light Communication System for Automotive Applications. Sensors 2020, 20, 3190. [Google Scholar] [CrossRef]
- Căilean, A.-M.; Beguni, C.; Avătămăniţei, S.-A.; Dimian, M. Experimental Demonstration of a 185 meters Vehicular Visible Light Communications Link. In Proceedings of the 2021 IEEE Photonics Conference (IPC), Vancouver, BC, Canada, 18–21 October 2021; pp. 1–2. [Google Scholar] [CrossRef]
- Căilean, A.-M.; Avătămăniţei, S.-A.; Beguni, C.; Popa, V.; Dimian, M. Experimental Demonstration of a 188 meters Infrastructure-to-Vehicle Visible Light Communications Link in Outdoor Conditions. In Proceedings of the 2021 IEEE Sensors Applications Symposium (SAS), Sundsvall, Sweden, 23–25 August 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Seminara, M.; Nawaz, T.; Caputo, S.; Mucchi, L.; Catani, J. Characterization of Field of View in Visible Light Communication Systems for Intelligent Transportation Systems. IEEE Photonics J. 2020, 12, 1–16. [Google Scholar] [CrossRef]
- Avătămăniței, S.-A.; Beguni, C.; Căilean, A.-M.; Dimian, M.; Popa, V. Evaluation of Misalignment Effect in Vehicle-to-Vehicle Visible Light Communications: Experimental Demonstration of a 75 Meters Link. Sensors 2021, 21, 3577. [Google Scholar] [CrossRef]
- Béchadergue, B.; Chassagne, L.; Guan, H. Suitability of visible light communication for platooning applications: An experimental study. In Proceedings of the 2018 Global LIFI Congress (GLC), Paris, France, 8–9 February 2018; pp. 1–6. [Google Scholar]
- Nawaz, T.; Seminara, M.; Caputo, S.; Mucchi, L.; Cataliotti, F.S.; Catani, J. IEEE 802.15.7-Compliant Ultra-Low Latency Relaying VLC System for Safety-Critical ITS. IEEE Trans. Veh. Technol. 2019, 68, 12040–12051. [Google Scholar] [CrossRef] [Green Version]
- Beguni, C.; Căilean, A.-M.; Avătămăniței, S.-A.; Dimian, M. Analysis and Experimental Investigation of the Light Dimming Effect on Automotive Visible Light Communications Performances. Sensors 2021, 21, 4446. [Google Scholar] [CrossRef] [PubMed]
- Global Status Report on Road Safety 2018; World Health Organization: Geneva, Switzerland, 2018.
- The Top 10 Causes of Death—Press Release; World Health Organization: Geneva, Switzerland, 2020.
- Road Traffic Injuries—Press Release; World Health Organization: Geneva, Switzerland, 2021.
- Road Traffic Deaths, 1990 to 2019. Available online: https://ourworldindata.org/grapher/road-traffic-deaths-sdgs (accessed on 25 May 2022).
- Road Safety: 4000 Fewer People Lost Their Lives on EU Roads in 2020 As Death Rate Falls to All-Time Low European Commission—Press Release; European Commission: Brussels, Belgium, 2021.
- 2020 Fatality Data Show Increased Traffic Fatalities During Pandemic—Press Release; United States Department of Transportation: Washington, DC, USA, 3 June 2021.
- Kolakowsky-Hayner, S.A.; Goldin, Y.; Kingsley, K.; Alzueta, E.; Arango-Lasprilla, J.C.; Perrin, P.B.; Baker, F.C.; Ramos-Usuga, D.; Constantinidou, F. Psychosocial Impacts of the COVID-19 Quarantine: A Study of Gender Differences in 59 Countries. Medicina 2021, 57, 789. [Google Scholar] [CrossRef]
- North, C.S.; Surís, A.M.; Pollio, D.E. A Nosological Exploration of PTSD and Trauma in Disaster Mental Health and Implications for the COVID-19 Pandemic. Behav. Sci. 2021, 11, 7. [Google Scholar] [CrossRef] [PubMed]
- 2019 Road Safety Statistics: What Is Behind the Figures?—Press Release; European Commission: Brussels, Belgium, 11 June 2020.
- Rahimian, P.; O’Neal, E.E.; Yon, J.P.; Franzen, L.; Jiang, Y.; Plumert, J.M.; Kearney, J.K. Using a virtual environment to study the impact of sending traffic alerts to texting pedestrians. In 2016 IEEE Virtual Reality (VR); IEEE: Piscataway, NJ, USA, 2016; pp. 141–149. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, C.; Chen, F.; Wei, Y. The effects of mobile phone use on pedestrian crossing behavior and safety at unsignalized intersections. In Proceedings of the 2017 4th International Conference on Transportation Information and Safety (ICTIS), Banff, AB, Canada, 8–10 August 2017; pp. 280–285. [Google Scholar] [CrossRef]
- Yan, J.; Lou, P.; Li, R.; Hu, J.; Xiong, J. Research on the Multiple Factors Influencing Human Identification Based on Pyroelectric Infrared Sensors. Sensors 2018, 18, 604. [Google Scholar] [CrossRef] [Green Version]
- Akhter, F.; Khadivizand, S.; Siddiquei, H.R.; Alahi, M.E.E.; Mukhopadhyay, S. IoT Enabled Intelligent Sensor Node for Smart City: Pedestrian Counting and Ambient Monitoring. Sensors 2019, 19, 3374. [Google Scholar] [CrossRef] [Green Version]
- Wu, C.-M.; Chen, X.-Y.; Wen, C.-Y.; Sethares, W.A. Cooperative Networked PIR Detection System for Indoor Human Localization. Sensors 2021, 21, 6180. [Google Scholar] [CrossRef]
- Thi Phuoc Van, N.; Tang, L.; Demir, V.; Hasan, S.F.; Duc Minh, N.; Mukhopadhyay, S. Review-Microwave Radar Sensing Systems for Search and Rescue Purposes. Sensors 2019, 19, 2879. [Google Scholar] [CrossRef] [Green Version]
- Czyżewski, A.; Kotus, J.; Szwoch, G. Estimating Traffic Intensity Employing Passive Acoustic Radar and Enhanced Microwave Doppler Radar Sensor. Remote Sens. 2020, 12, 110. [Google Scholar] [CrossRef] [Green Version]
- Rodrigues, D.V.Q.; Li, C. A Review on Low-Cost Microwave Doppler Radar Systems for Structural Health Monitoring. Sensors 2021, 21, 2612. [Google Scholar] [CrossRef] [PubMed]
- Rosique, F.; Navarro, P.J.; Fernández, C.; Padilla, A. A Systematic Review of Perception System and Simulators for Autonomous Vehicles Research. Sensors 2019, 19, 648. [Google Scholar] [CrossRef] [Green Version]
- Zou, B.; Li, W.; Hou, X.; Tang, L.; Yuan, Q. A Framework for Trajectory Prediction of Preceding Target Vehicles in Urban Scenario Using Multi-Sensor Fusion. Sensors 2022, 22, 4808. [Google Scholar] [CrossRef] [PubMed]
- Mihálik, M.; Hruboš, M.; Vestenický, P.; Holečko, P.; Nemec, D.; Malobický, B.; Mihálik, J. A Method for Detecting Dynamic Objects Using 2D LiDAR Based on Scan Matching. Appl. Sci. 2022, 12, 5641. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, L.; Yang, J.; Cao, C.; Wang, W.; Ran, Y.; Tan, Z.; Luo, M. A Review of Multi-Sensor Fusion SLAM Systems Based on 3D LIDAR. Remote Sens. 2022, 14, 2835. [Google Scholar] [CrossRef]
- Zhang, Z.; Zheng, J.; Tao, Y.; Xiao, Y.; Yu, S.; Asiri, S.; Li, J.; Li, T. Traffic Sign Based Point Cloud Data Registration with Roadside LiDARs in Complex Traffic Environments. Electronics 2022, 11, 1559. [Google Scholar] [CrossRef]
- Zadobrischi, E. Analysis and Experiment of Wireless Optical Communications in Applications Dedicated to Mobile Devices with Applicability in the Field of Road and Pedestrian Safety. Sensors 2022, 22, 1023. [Google Scholar] [CrossRef]
- Ashraf, K.; Varadarajan, V.; Rahman, M.R.; Walden, R.; Ashok, A. See-Through a Vehicle: Augmenting Road Safety Information Using Visual Perception and Camera Communication in Vehicles. IEEE Trans. Veh. Technol. 2021, 70, 3071–3086. [Google Scholar] [CrossRef]
- Cahyadi, W.A.; Chung, Y.H.; Ghassemlooy, Z.; Hassan, N.B. Optical Camera Communications: Principles, Modulations, Potential and Challenges. Electronics 2020, 9, 1339. [Google Scholar] [CrossRef]
- Younus, O.I.; Hassan, N.B.; Ghassemlooy, Z.; Zvanovec, S.; Alves, L.N.; Le-Minh, H. The Utilization of Artificial Neural Network Equalizer in Optical Camera Communications. Sensors 2021, 21, 2826. [Google Scholar] [CrossRef]
- Saad, W.K.; Hashim, Y.; Jabbar, W.A. Design and Implementation of Portable Smart Wireless Pedestrian Crossing Control System. IEEE Access 2020, 8, 106109–106120. [Google Scholar] [CrossRef]
- Xiog, G.; Yang, T.; Li, M.; Zhang, Y.; Song, W.; Gong, J. A Novel V2X-based Pedestrian Collision Avoidance System and the Effects Analysis of Communication Delay and Packet Loss on Its application. In Proceedings of the 2018 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Madrid, Spain, 12–14 September 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Marchetti, E.; Du, R.; Norouzian, F.; Hoare, E.G.; Cherniakov, M.; Gashinova, M.; Tran, T.Y. Radar reflectivity and motion characteristics of pedestrians at 300 GHz. In Proceedings of the 2017 European Radar Conference (EURAD), Nuremberg, Germany, 11–13 October 2017; pp. 57–60. [Google Scholar] [CrossRef]
- Marchetti, E.; Du, R.; Norouzian, F.; Hoare, E.G.; Tran, T.Y.; Cherniakov, M.; Gashinova, M. Comparison of pedestrian reflectivities at 24 and 300 GHz. In Proceedings of the 2017 18th International Radar Symposium (IRS), Prague, Czech Republic, 28–30 June 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Schweizer, B.; Knill, C.; Werbunat, D.; Stephany, S.; Waldschmidt, C. Mutual Interference of Automotive OFDM Radars—Analysis and Countermeasures. IEEE J. Microw. 2021, 1, 950–961. [Google Scholar] [CrossRef]
- Furuhashi, R.; Yamada, K. Estimation of street crossing intention from a pedestrian′s posture on a sidewalk using multiple image frames. In Proceedings of the First Asian Conference on Pattern Recognition, Beijing, China, 28 November 2011; pp. 17–21. [Google Scholar] [CrossRef]
- Zadobrischi, E.; Dimian, M. Inter-Urban Analysis of Pedestrian and Drivers through a Vehicular Network Based on Hybrid Communications Embedded in a Portable Car System and Advanced Image Processing Technologies. Remote Sens. 2021, 13, 1234. [Google Scholar] [CrossRef]
- Brehar, R.D.; Muresan, M.P.; Mariţa, T.; Vancea, C.C.; Negru, M.; Nedevschi, S. Pedestrian Street-Cross Action Recognition in Monocular Far Infrared Sequences. IEEE Access 2021, 9, 74302–74324. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, H.; Gu, M.; Wang, C. Comparison of the Pedestrian Crossing Intention Parameters and Research on Intention Recognition Model Under Different Road Conditions. IEEE Access 2020, 8, 196675–196689. [Google Scholar] [CrossRef]
- Pop, D.O.; Rogozan, A.; Chatelain, C.; Nashashibi, F.; Bensrhair, A. Multi-Task Deep Learning for Pedestrian Detection, Action Recognition and Time to Cross Prediction. IEEE Access 2019, 7, 149318–149327. [Google Scholar] [CrossRef]
- Kim, M.; Joung, S.; Park, K.; Kim, S.; Sohn, K. Unpaired Cross-Spectral Pedestrian Detection Via Adversarial Feature Learning. In Proceedings of the 2019 IEEE International Conference on Image Processing (ICIP), Taipei, Taiwan, 22–25 September 2019; pp. 1650–1654. [Google Scholar] [CrossRef]
- Dafrallah, S.; Amine, A.; Mousset, S.; Bensrhair, A. Monocular Pedestrian Orientation Recognition Based on Capsule Network for a Novel Collision Warning System. IEEE Access 2021, 9, 141635–141650. [Google Scholar] [CrossRef]
- Zhang, S.; Abdel-Aty, M.; Wu, Y.; Zheng, O. Pedestrian Crossing Intention Prediction at Red-Light Using Pose Estimation. IEEE Trans. Intell. Transp. Syst. 2021, 23, 2331–2339. [Google Scholar] [CrossRef]
- Quan, R.; Zhu, L.; Wu, Y.; Yang, Y. Holistic LSTM for Pedestrian Trajectory Prediction. IEEE Trans. Image Processing 2021, 30, 3229–3239. [Google Scholar] [CrossRef]
- Xu, W.; Ruiz, N.; Pierce, K.; Huang, R.; Meyer, J.; Duthie, J. Detecting Pedestrian Crossing Events in Large Video Data from Traffic Monitoring Cameras. In Proceedings of the 2019 IEEE International Conference on Big Data (Big Data), Los Angeles, CA, USA, 9–12 December 2019; pp. 3824–3831. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Sensor Model | Sensor Detection Range | Sensor Detection Angle | Sensor Purpose |
|---|---|---|---|---|
| Lidar | Lite V3 | 40 m | ±0.25° | Detection of pedestrians in the area of interest, including the sidewalk area |
| Ultrasonic | HC-SR04 | 4 m | ±7.5° | Detection of pedestrians at the intersection between the sidewalk and the crosswalk |
| Passive Infra-Red | HC-SR501 | 6 m | ±60° | Detection of pedestrians in the crosswalk vicinity and on the crosswalk |
| Microwaves | RCWL-0516 | 6 m | ±85° | Detection of pedestrians in the crosswalk vicinity and on the crosswalk |
| VLC Emitter Parameter | Feature/Measure |
|---|---|
| VLC emitter type | LED-based pedestrian crossing traffic sign (60 × 60 cm) |
| Total LED power | 1.28 W for a single side LEDs group 2.56 W for both LED groups |
| VLC emitter optical irradiance (measured at 1 m distance) | 4.8 µW/cm2 for a single side LEDs group 6.8 µW/cm2 for both LED groups |
| VLC emitter half angle | 20° |
| VLC emitter center wavelength | 610 ± 20 nm |
| VLC emitter height | 270 cm (similar to the real case) |
| Modulation technique | OOK |
| Coding technique | Manchester |
| Data rate | 100 kb/s |
| Communication type | Asynchronous communication protocol |
| VLC Receiver Parameter | Feature/Measure |
|---|---|
| VLC receiver type | PIN photodiode based Thorlabs PDA100A2 optical detector |
| VLC receiver optical filter characteristics | 640 ± 45 nm |
| VLC receiver optical system characteristics | 2-inch optical lens |
| VLC receiver FOV | ±20° |
| VLC receiver height | 74 cm (similar to the real case when the VLC receiver is mounted at the vehicle front lights level) |
| VLC receiver data processing unit | 180 MHz ARM Cortex M4 microcontroller |
| VLC receiver capabilities | Real-time data processing having data rates up to 500 kb/s and real-time bit error ratio processing |
| Alert Level | Pedestrian Action | Scenario Description | Active Sensors/Sensors Regions | ||
|---|---|---|---|---|---|
| LIDAR | Ultrasound | ||||
| S1 | S1’ | S2 | |||
| 1 (lowest) | No pedestrian in the area of interest | The sensors did not detect any presence in the supervised area | d ˃ 15 m | 0 | 0 |
| 2 | Pedestrian in the area with no evidence concerning any intention of using the crosswalk | At least one person has been identified in the area, but at this point the person’s location is more than 9 m away from the crosswalk | 9 m ≤ d ≤ 15 m | 0 | 0 |
| 3 | Pedestrian in the area with low evidence concerning the intention of using the crosswalk | A person has been identified by the sensors, and at this point, the person is near the crosswalk. | 3 m ≤ d ≤ 9 m | 0 | 0 |
| 4 | Pedestrian in the area with high evidence concerning the intention of using the crosswalk | A person has been identified by sensors, indicating that there is a real possibility that the person will use the crosswalk. | d ≤ 3 m | 0 | 0 |
| 5 | Pedestrian beginning to use the crosswalk | The sensors have identified a person in the security region, indicating that the pedestrian is on the verge of crossing the street | d ≤ 3 m and 86° < angle < 90° | 0 | d ≤ 4 m |
| 6 (highest) | Pedestrian on the crosswalk | The sensors have identified a person on the crosswalk. At this point, it is sure that the person is crossing the street. | X | 1 | X |
| Testing Scenario | Description of the Scenario | Total Number of Tests | True Positive | False Positive | False Negative | Overall Rate (True Positive/Total No. of Tests) |
|---|---|---|---|---|---|---|
| Alert Level 2 (lowest) | Pedestrian detected in the area associated with Alert Level 2 | 300 | 247 | 0 | 53 | 82.33% |
| Alert Level 3 | Pedestrian detected in the area associated with Alert Level 3 | 300 | 297 | 0 | 3 | 99% |
| Alert Level 4 | Pedestrian detected in the area associated with Alert Level 4 | 300 | 297 | 0 | 3 | 99% |
| Alert Level 5 | Pedestrian detected in the area associated with Alert Level 5 | 300 | 300 | 0 | 0 | 100% |
| Alert Level 6 (highest) | Pedestrian detected in the area associated with Alert Level 6 | 300 | 299 | 0 | 1 | 99.66% |
| Pedestrian detected | Pedestrian detected in at least one area | 300 | 300 | 0 | 0 | 100% |
| Parameter | Feature/Value |
|---|---|
| VLC Emitter type | LED-based standard pedestrian crossing traffic sign |
| VLC Emitter height | 270 cm |
| VLC emitter optical irradiance | 6.8 μW/cm2 at 1 m distance |
| VLC emitter wavelength | 610 nm ± 20 nm |
| Receiver type | ±15° PIN photodiode-based receiver |
| Receiver height | 74 cm |
| Received signal power | 6.8 μW/cm2–0.005 μW/cm2 |
| Noise irradiance induced by the natural light | 6500–13,000 μW/cm2 |
| Noise irradiance induced by fluorescent lights | 50–85 μW/cm2 |
| Emitter–receiver distance | 3–40 m |
| Emitter–receiver lateral distance | 1 m |
| Modulations, coding techniques and data rates | OOK modulation with Manchester coding at 100 kb/s data rate |
| Number of bits in a data set | 10 million |
| Testing conditions | Nighttime: in darkness Nighttime: under the influence of fluorescent light sources Daytime: under sunlight exposure |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Căilean, A.-M.; Beguni, C.; Avătămăniței, S.-A.; Dimian, M.; Popa, V. Design, Implementation and Experimental Investigation of a Pedestrian Street Crossing Assistance System Based on Visible Light Communications. Sensors 2022, 22, 5481. https://doi.org/10.3390/s22155481
Căilean A-M, Beguni C, Avătămăniței S-A, Dimian M, Popa V. Design, Implementation and Experimental Investigation of a Pedestrian Street Crossing Assistance System Based on Visible Light Communications. Sensors. 2022; 22(15):5481. https://doi.org/10.3390/s22155481
Chicago/Turabian StyleCăilean, Alin-Mihai, Cătălin Beguni, Sebastian-Andrei Avătămăniței, Mihai Dimian, and Valentin Popa. 2022. "Design, Implementation and Experimental Investigation of a Pedestrian Street Crossing Assistance System Based on Visible Light Communications" Sensors 22, no. 15: 5481. https://doi.org/10.3390/s22155481
APA StyleCăilean, A. -M., Beguni, C., Avătămăniței, S. -A., Dimian, M., & Popa, V. (2022). Design, Implementation and Experimental Investigation of a Pedestrian Street Crossing Assistance System Based on Visible Light Communications. Sensors, 22(15), 5481. https://doi.org/10.3390/s22155481